Моделирование и исследование характеристик типовых динамических звеньев систем автоматического управления. Лабораторная 1 (вариант 24). 1 Исследование инерционного звена
 Скачать 1.82 Mb. Скачать 1.82 Mb.
|

|
Целью лабораторной работы является получение навыков разработки электронных моделей типовых динамических звеньев САУ, исследование их частотных и переходных характеристик на этих моделях. Такими звеньями, в частности, являются инерционное, инерционное форсирующее, а также звенья второго порядка (колебательное и апериодическое). Данные варианта 24: 1 Исследование инерционного звена 1.1 Собрать схему модели апериодического (инерционного) звена, установить значения 1.2 Получить переходную характеристику и определить время переходного процесса 1.3 Получить экспериментальные ЛАЧХ и ЛФЧХ, замерить частоту среза 1.4 Увеличить значения постоянной времени Т звена в два, три и четыре раза и повторить выполнение заданий по п.п. 1.2 и 1.3. 1.5 Построить графики зависимостей 1.6 Оценить влияние величины постоянной времени на характеристики апериодического (инерционного) звена. 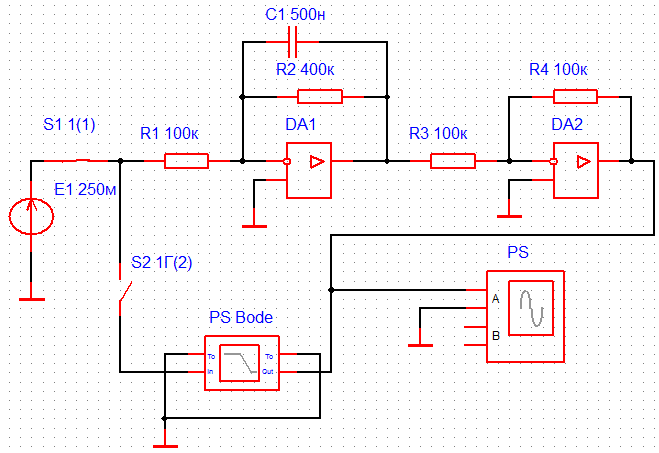 Рисунок 1 – Схема для исследования инерционного звена 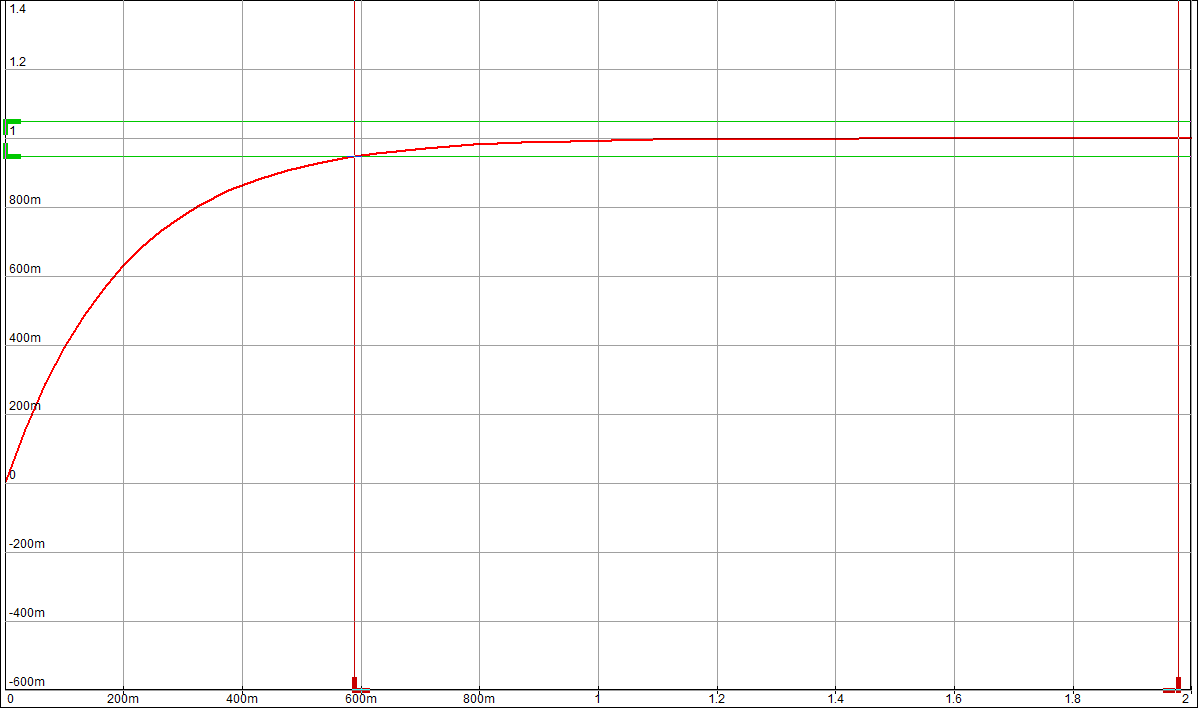 Рисунок 2 – Переходная характеристика инерционного звена (при Т=200 мс) 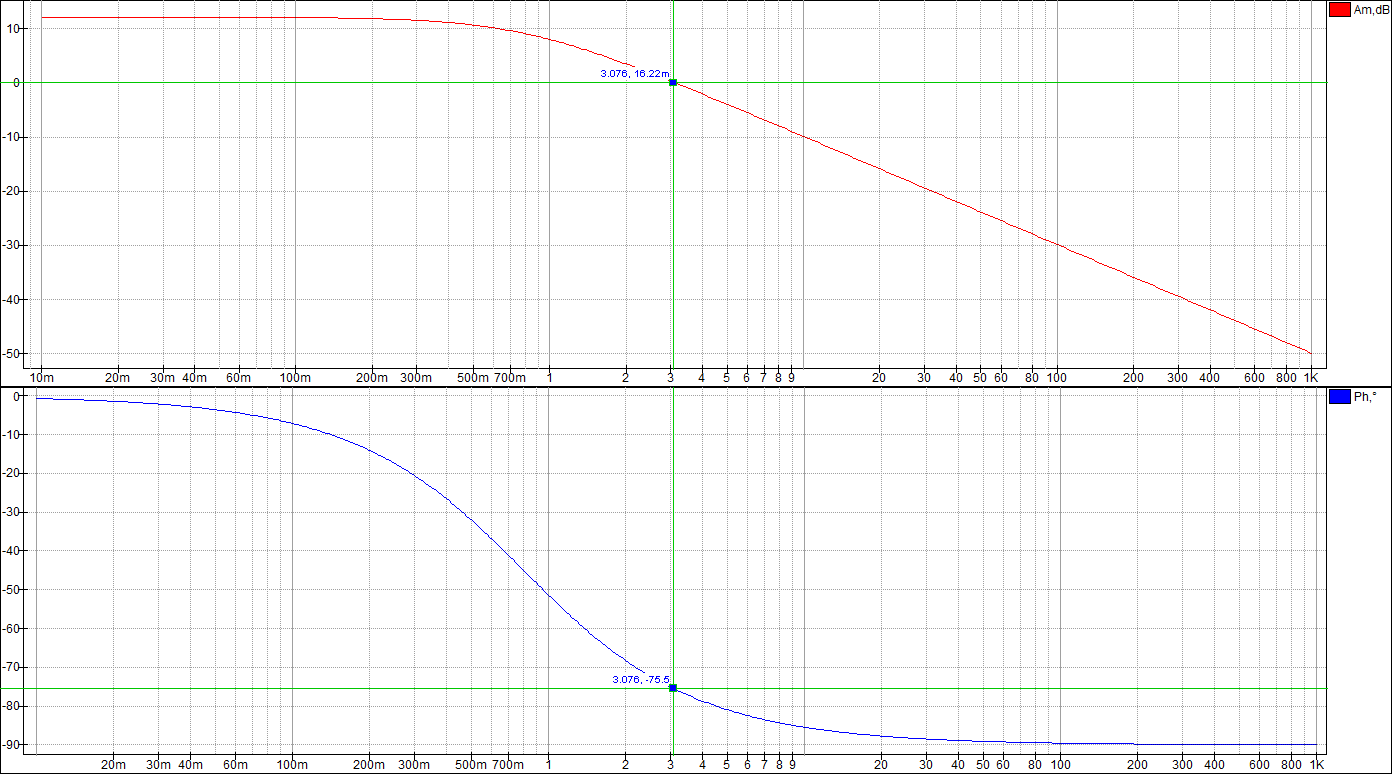 Рисунок 3 – ЛАЧХ и ЛФЧХ инерционного звена (при Т=200 мс) 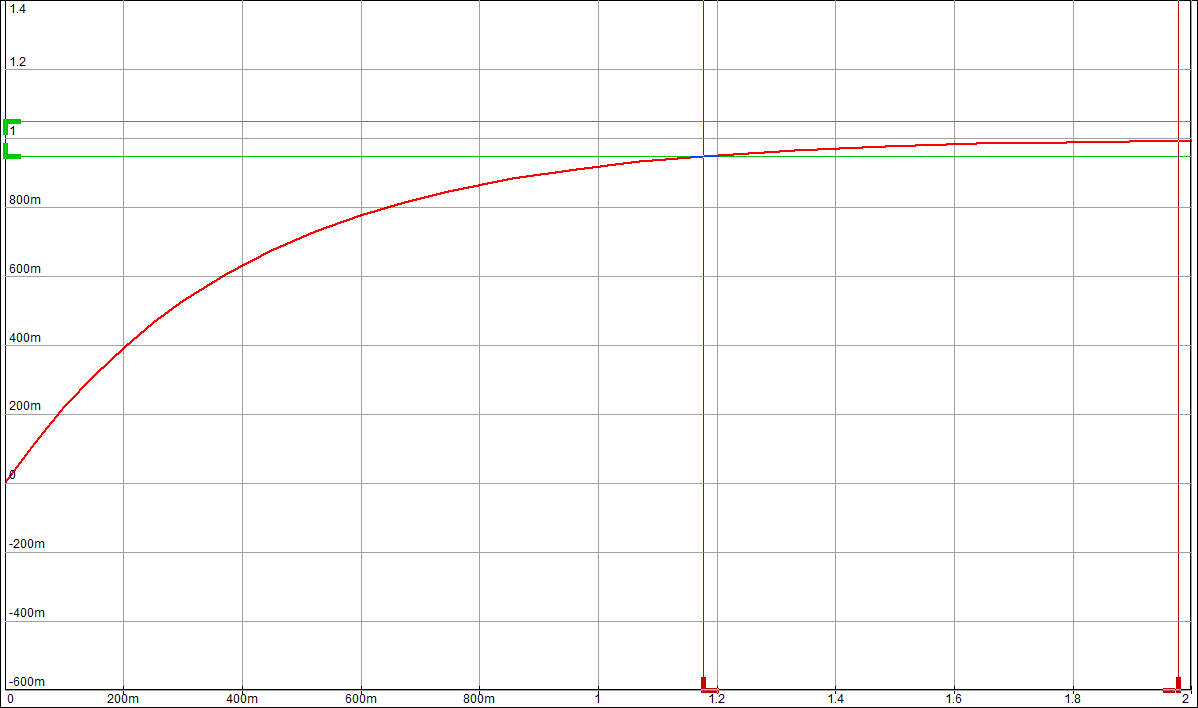 Рисунок 4 – Переходная характеристика инерционного звена (при Т=400 мс) 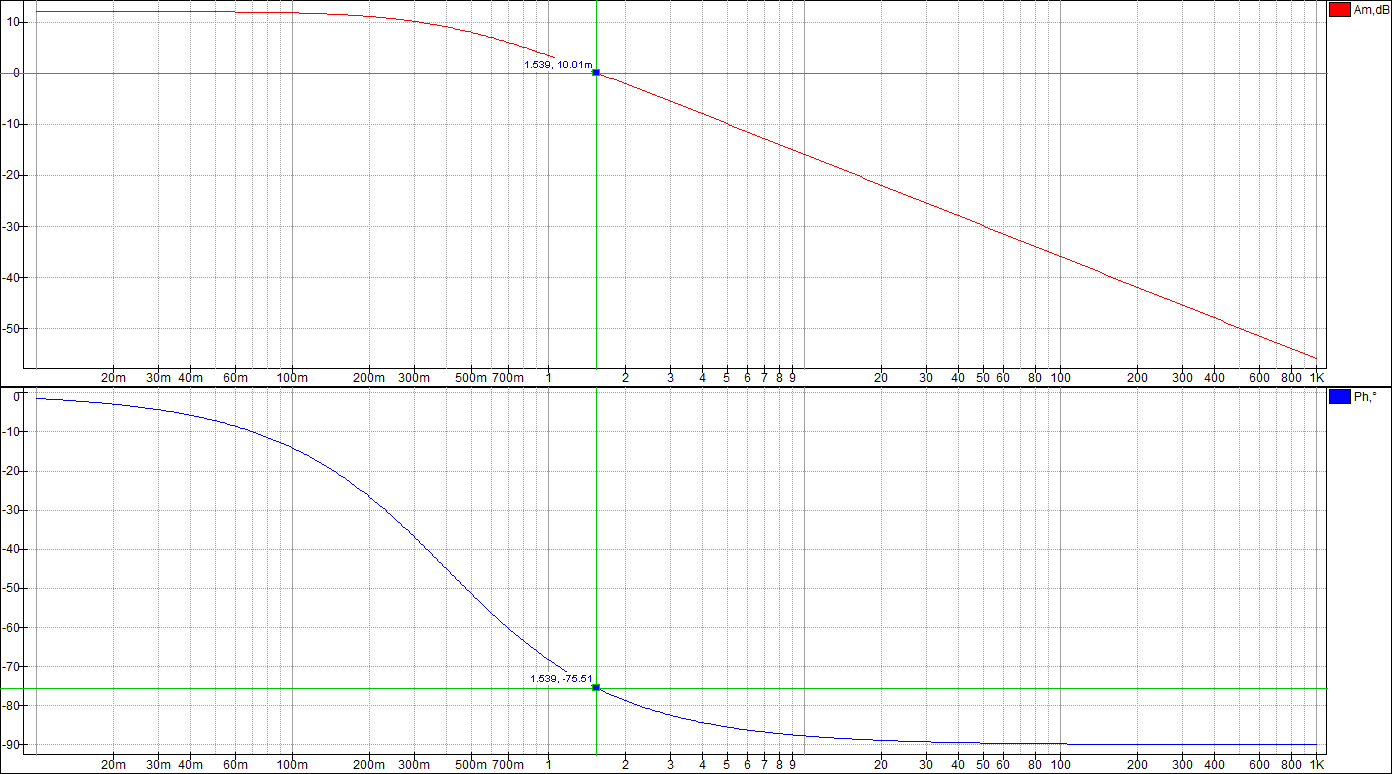 Рисунок 5 – ЛАЧХ и ЛФЧХ инерционного звена (при Т=400 мс) 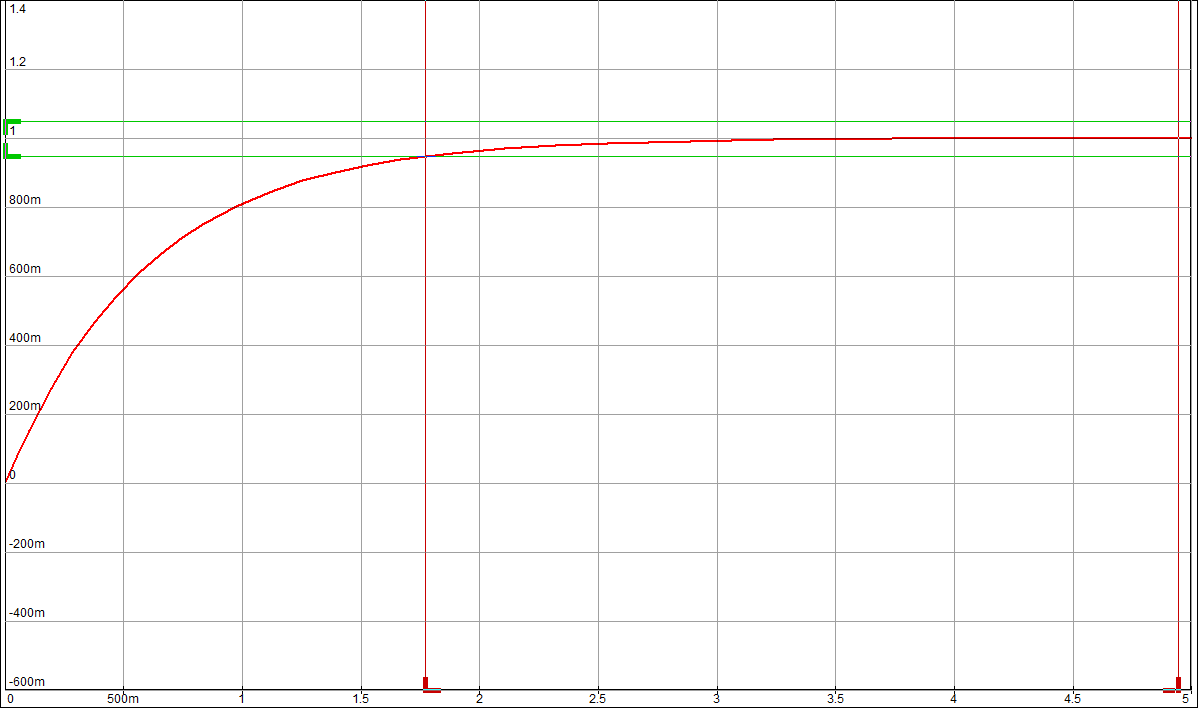 Рисунок 6 – Переходная характеристика инерционного звена (при Т=600 мс) 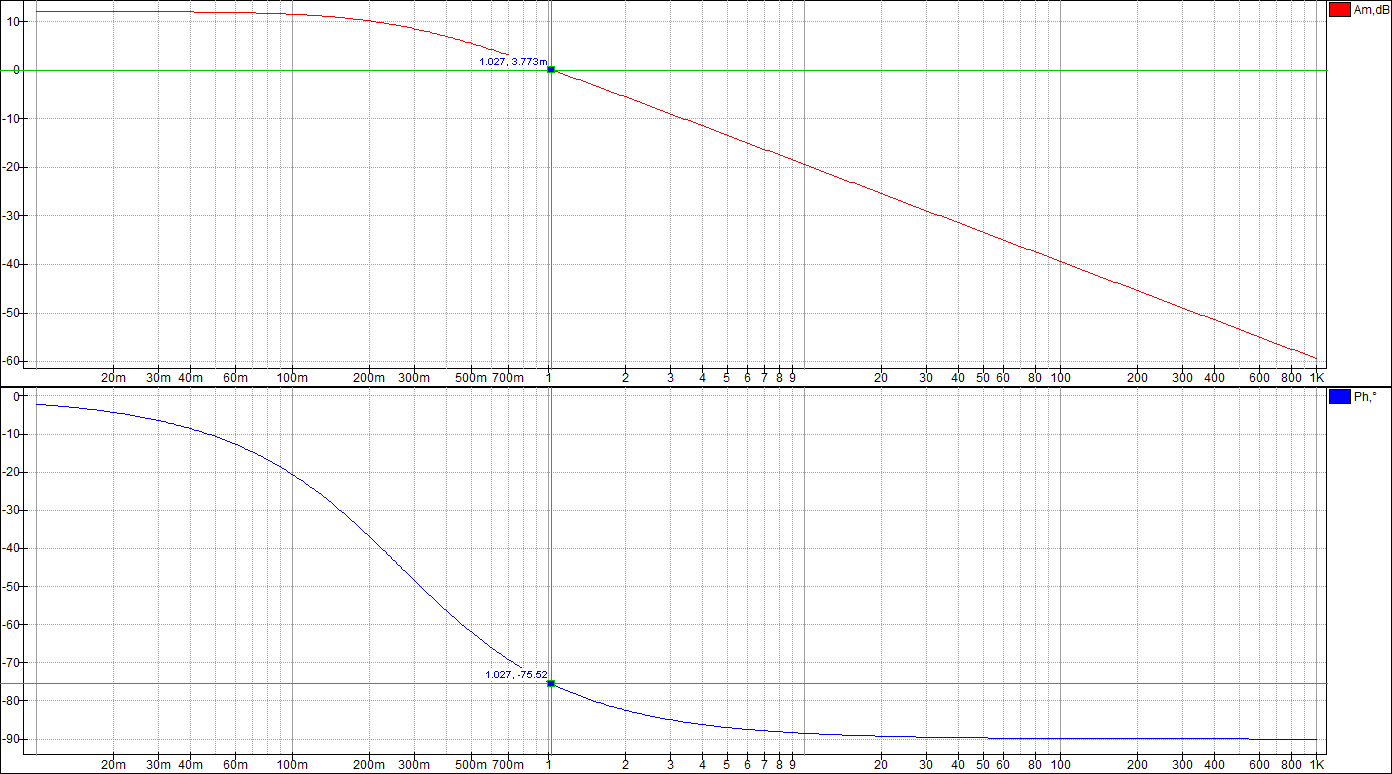 Рисунок 7 – ЛАЧХ и ЛФЧХ инерционного звена (при Т=600 мс) 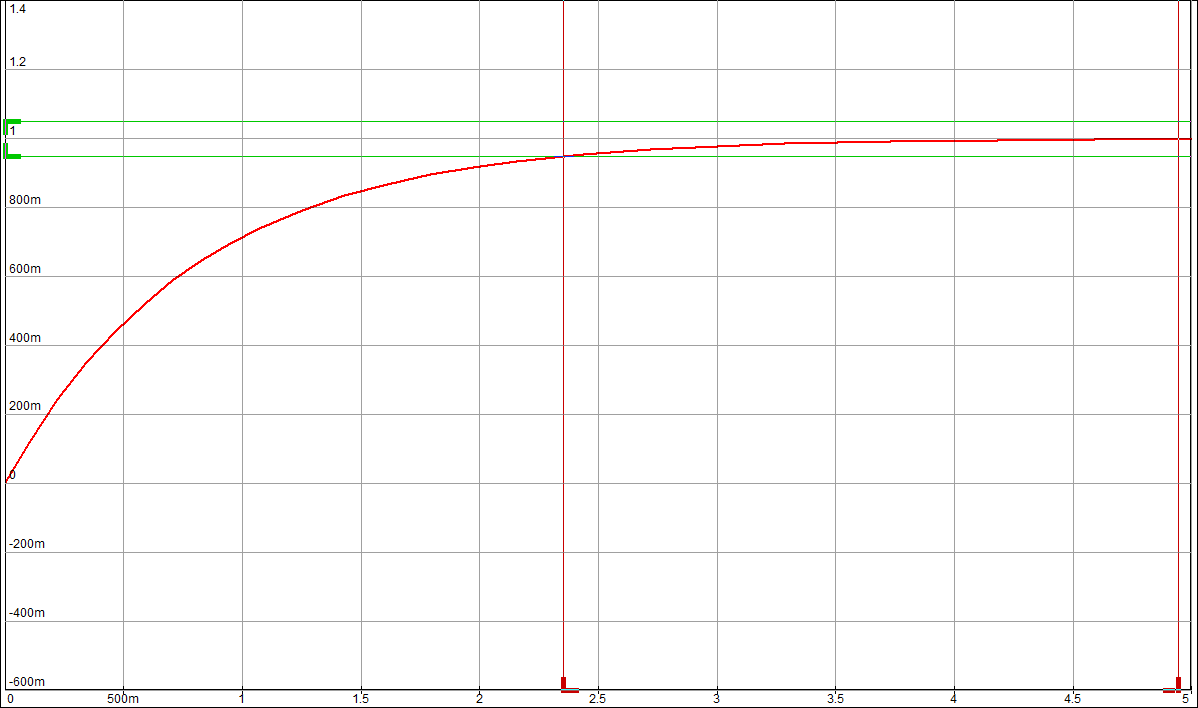 Рисунок 8 – Переходная характеристика инерционного звена (при Т=800 мс) 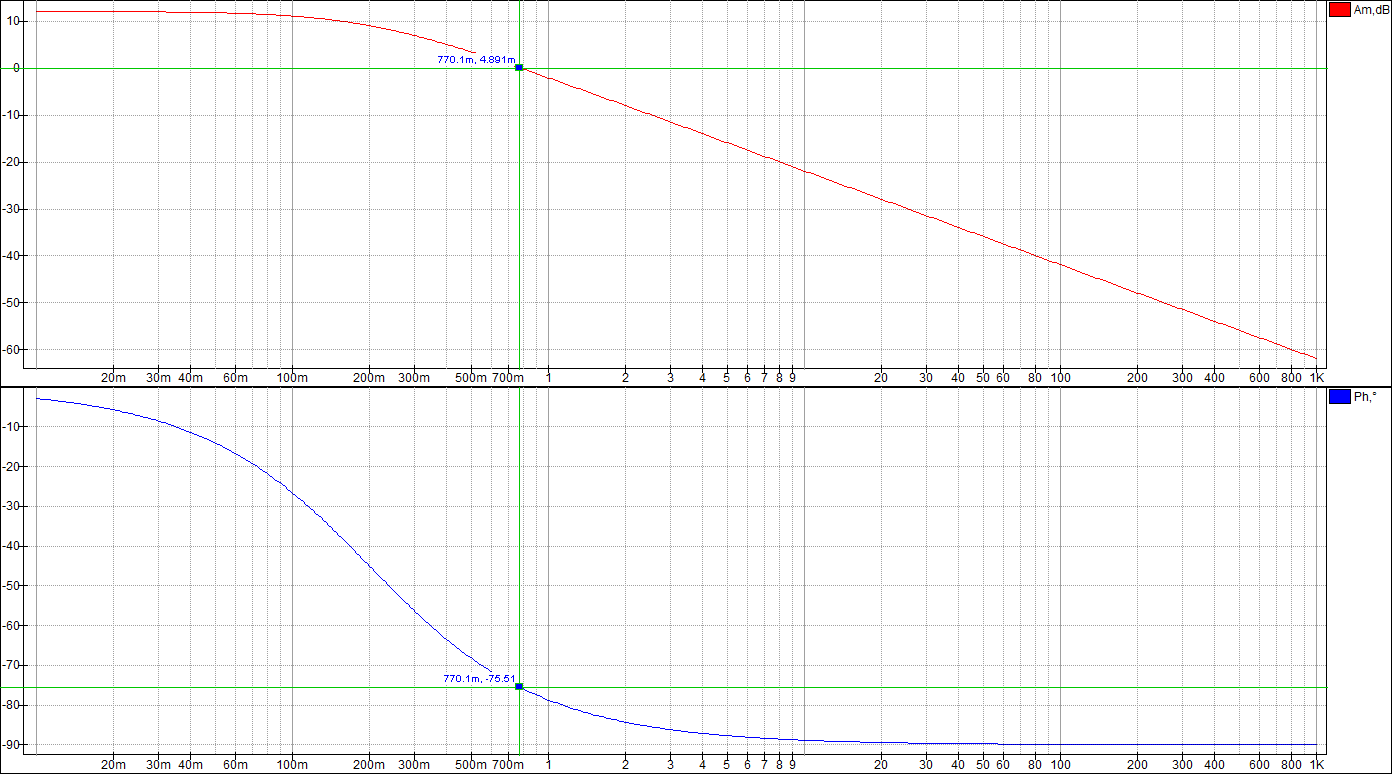 Рисунок 9 – ЛАЧХ и ЛФЧХ инерционного звена (при Т=800 мс) Таблица 1 – Таблица найденных значений
По таблице значений построим графики зависимостей.  Рисунок 10 – График зависимости  Рисунок 11 – График зависимости  Рисунок 12 – График зависимости Вывыдо: при увеличении постоянной времени инерционного звена: - время переходного процесса линейно увеличивается; - частота среза уменьшается. Проверим это откуда  . .Откуда при Т=200 мс - фаза – постоянна. 2 Исследование инерционного форсирующего звена 2.1 Собрать схему электронной модели инерционного форсирующего звена. Принять 2.2 Снять переходную характеристику и определить величину скачка 2.3 Получить экспериментальные ЛАЧХ и ЛФЧХ, замерить частоту среза 2.4 Установить соотношения значений постоянных времени τ = 0,2T , τ = 0,3T , τ = 0,4T и повторить выполнение заданий пп. 2.2 и 2.3, пересчитав параметры модели в соответствии с п. 2.1. 2.5 Построить графики зависимостей λ=f(τ), 2.6 Оценить влияние постоянной времени форсирующего звена на характеристики инерционного форсирующего звена. 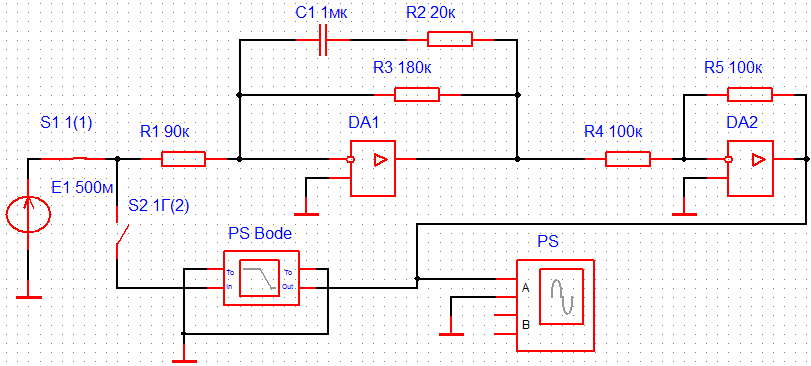 Рисунок 13 – Схема для исследования форсирующего инерционного звена 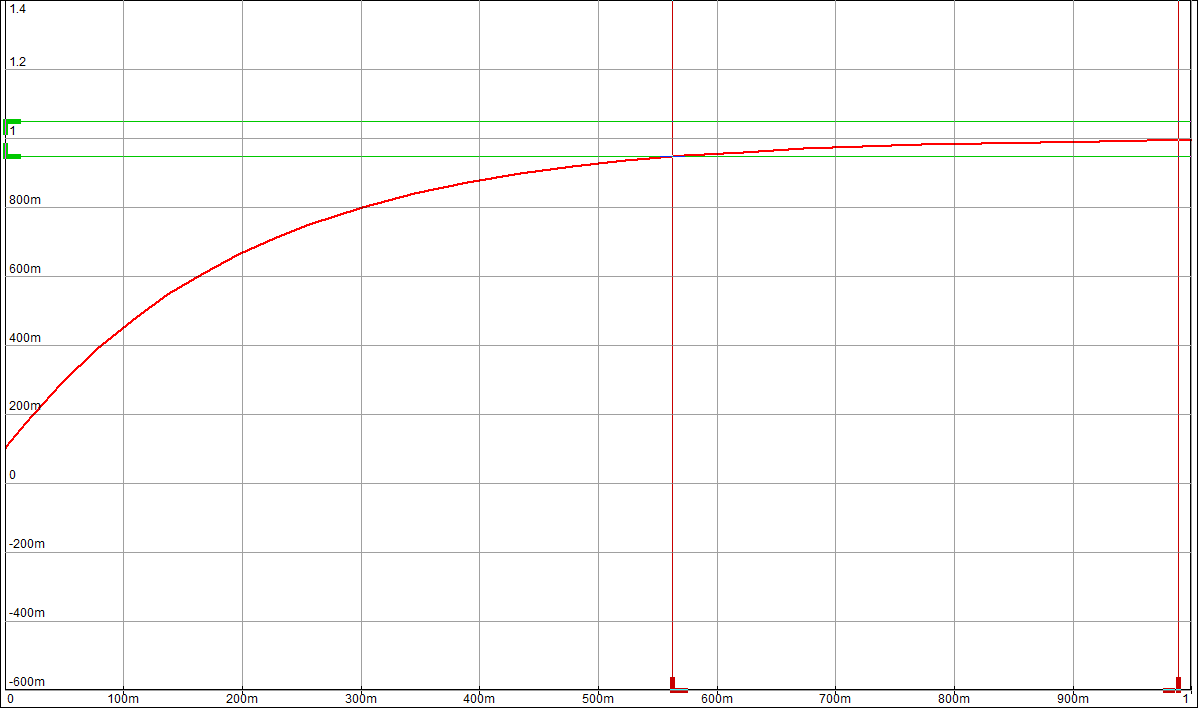 Рисунок 14 – Переходная характеристика форсирующего инерционного звена (при τ=0,1T) 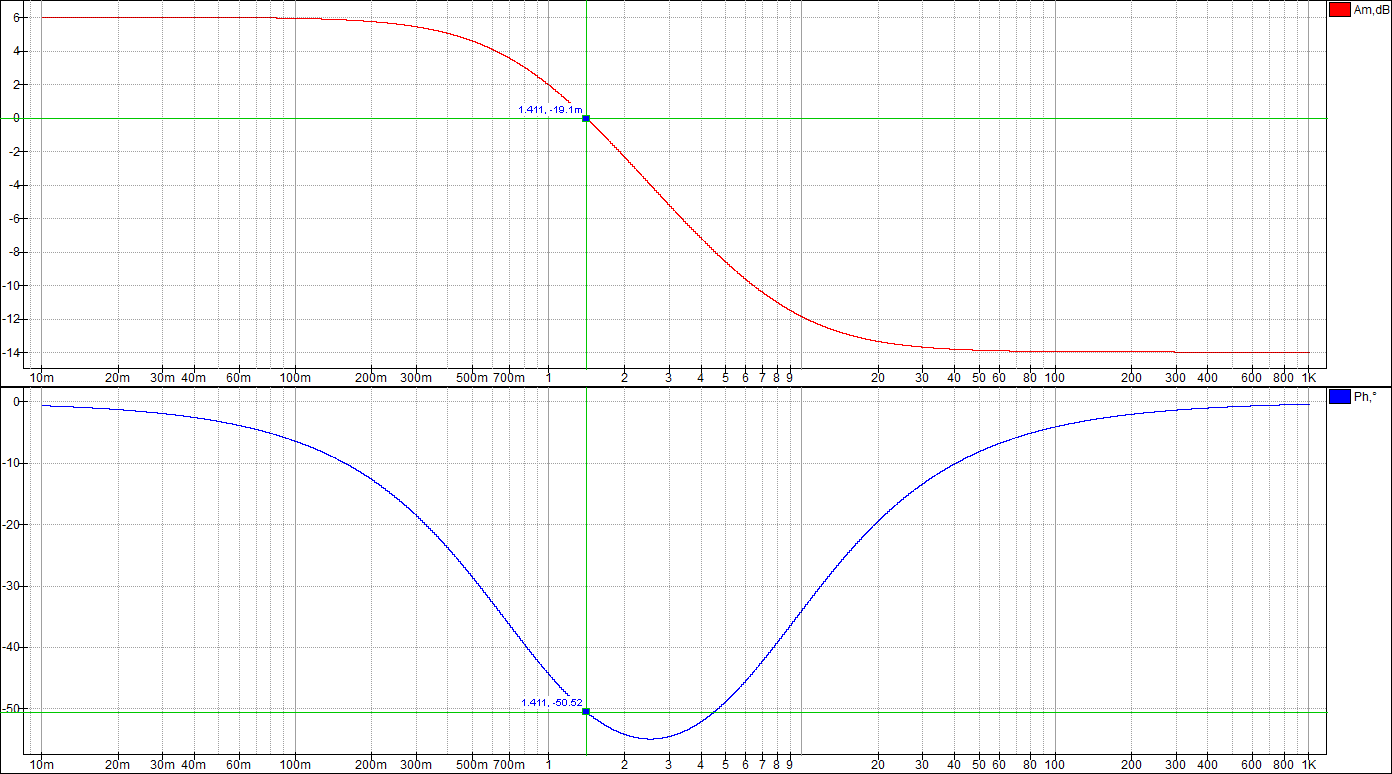 Рисунок 15 – ЛАЧХ и ЛФЧХ форсирующего инерционного звена (при τ=0,1T) 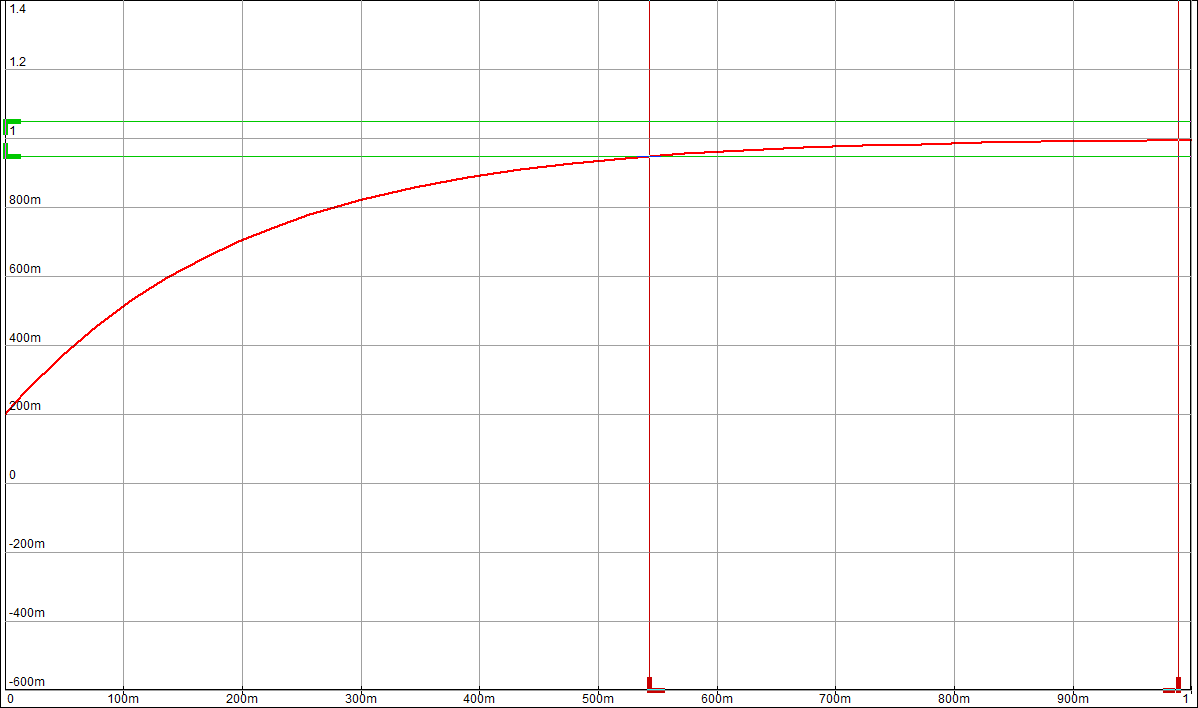 Рисунок 16 – Переходная характеристика форсирующего инерционного звена (при τ=0,2T) 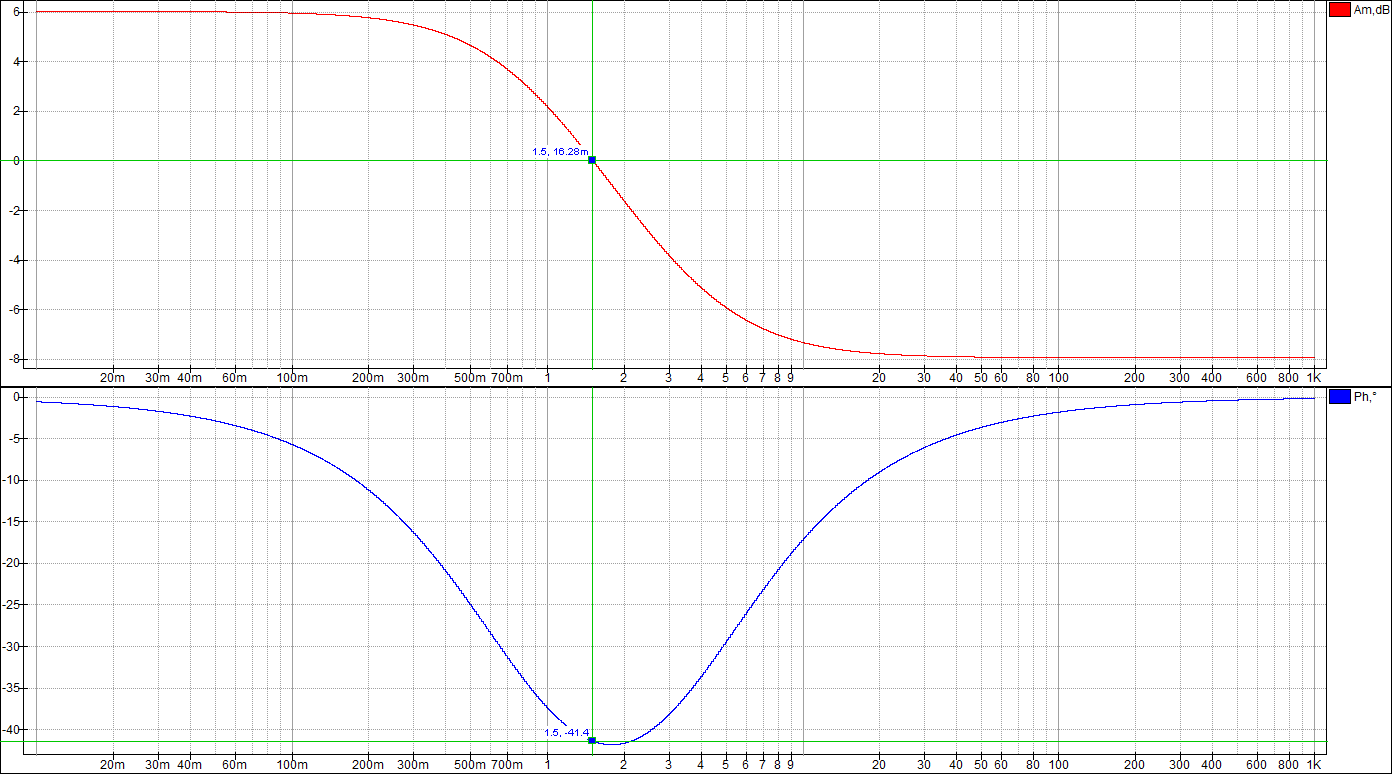 Рисунок 17 – ЛАЧХ и ЛФЧХ форсирующего инерционного звена (при τ=0,2T) 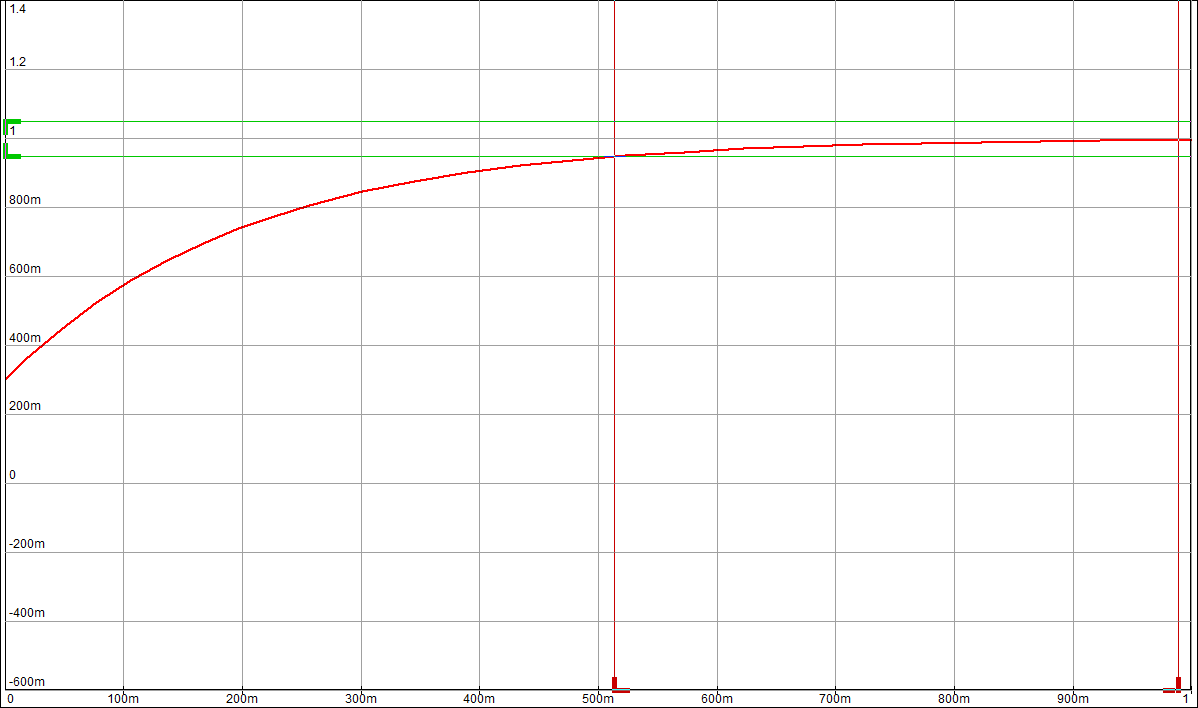 Рисунок 18 – Переходная характеристика форсирующего инерционного звена (при τ=0,3T) 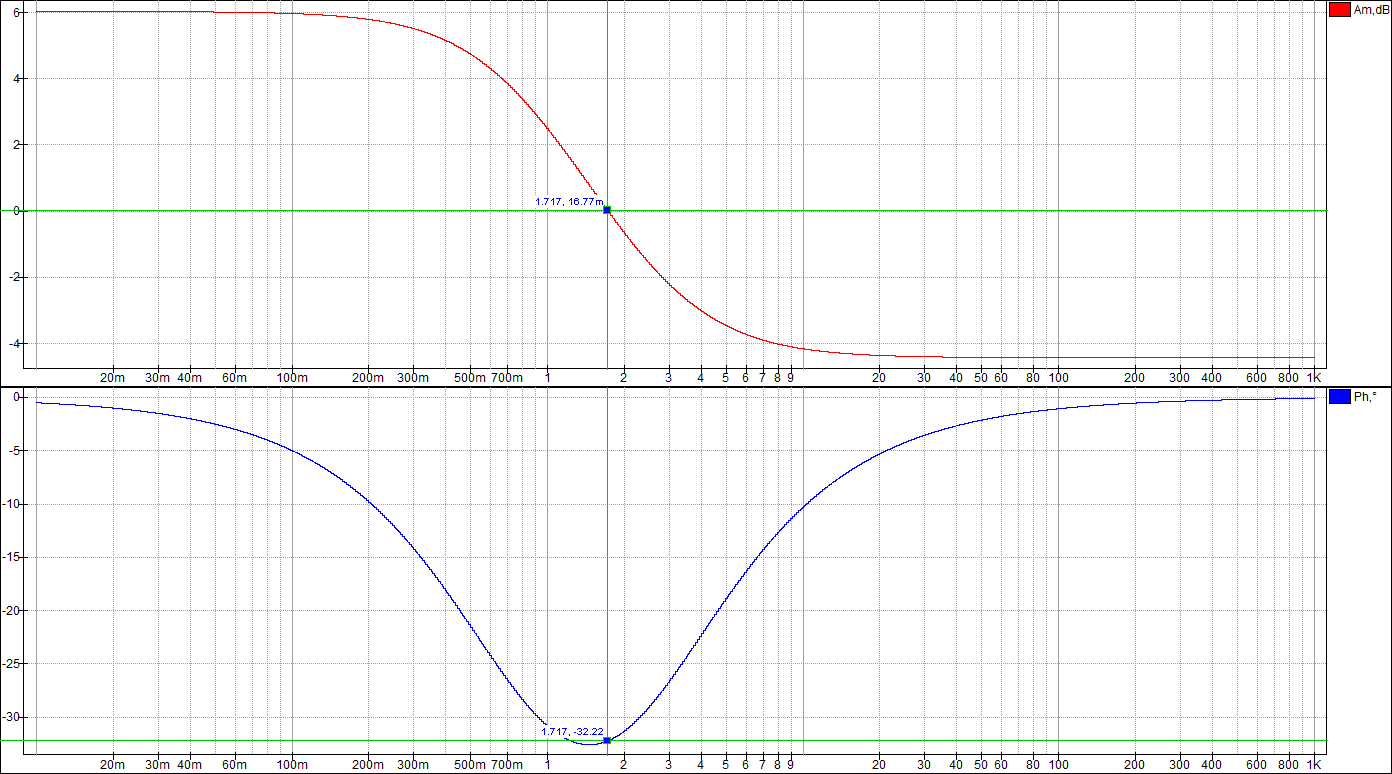 Рисунок 19 – ЛАЧХ и ЛФЧХ форсирующего инерционного звена (при τ=0,3T) 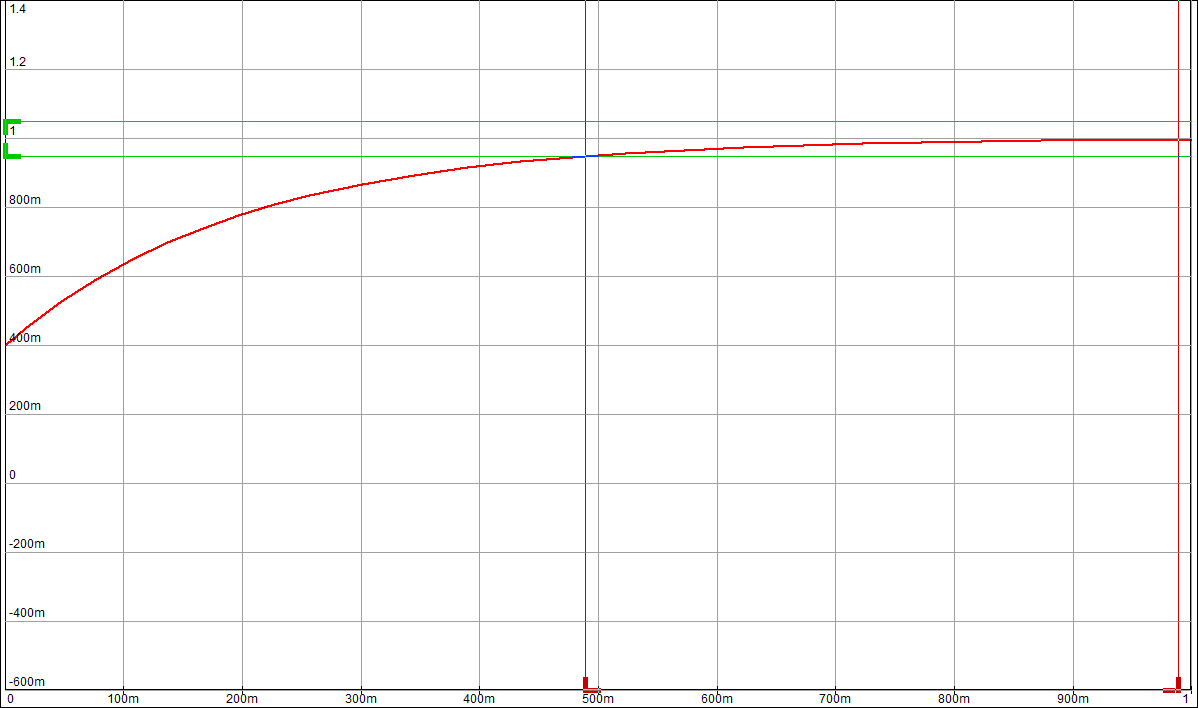 Рисунок 20 – Переходная характеристика форсирующего инерционного звена (при τ=0,4T) 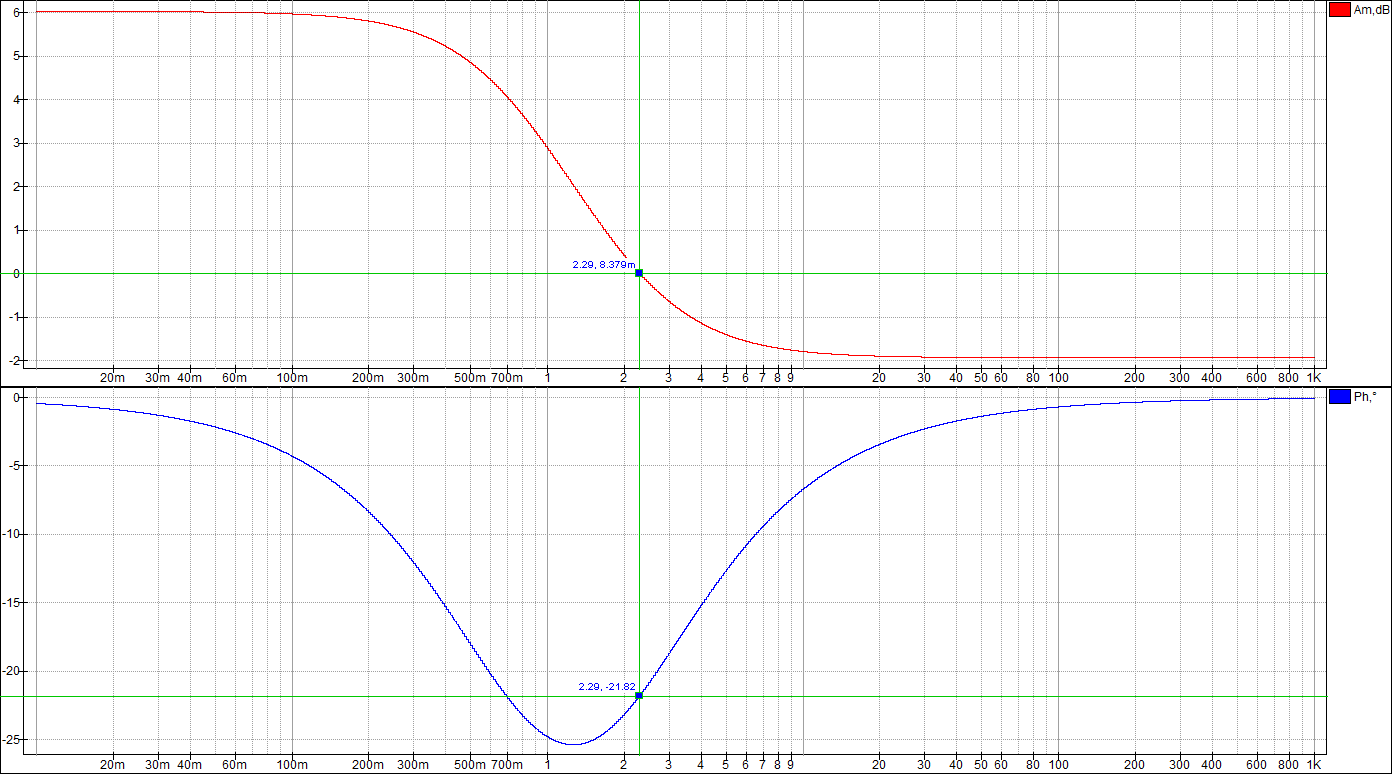 Рисунок 21 – ЛАЧХ и ЛФЧХ форсирующего инерционного звена (при τ=0,4T) Таблица 2 – Таблица найденных значений
По таблице значений построим графики зависимостей.  Рисунок 22 – График зависимости λ=f(τ)  Рисунок 23 – График зависимости  Рисунок 24 – График зависимости  Рисунок 25 – График зависимости Выводы: при увеличении постоянной времени форсирующего инерционного звена (а, следовательно, при увеличении отношения - - время переходного процесса уменьшается, тогда, как у инерционного звена время переходного процесса увеличивалось; - частота среза увеличивается, тогда, как у инерционного звена частота среза уменьшалась; - фаза возрастает, тогда, как у инерционного звена фаза была постоянной. 3.1 Собрать схему модели звена второго порядка в соответствии с рис. 5.11. Приняв 3.2 Установить напряжение питания модели, равное 3.3 Рассчитать перерегулирование где 3.4 Получить экспериментальные ЛАЧХ и ЛФЧХ, замерить частоту среза 3.5 Установить значения ξ=0,5, ξ=0,3, ξ=0,1, а также ξ=1, ξ=2, ξ=3 и повторить выполнение пп. 3.2 – 3.4. 3.6 Построить графики зависимостей 3.7 Оценить влияние коэффициента демпфирования на характеристики звеньев второго порядка. 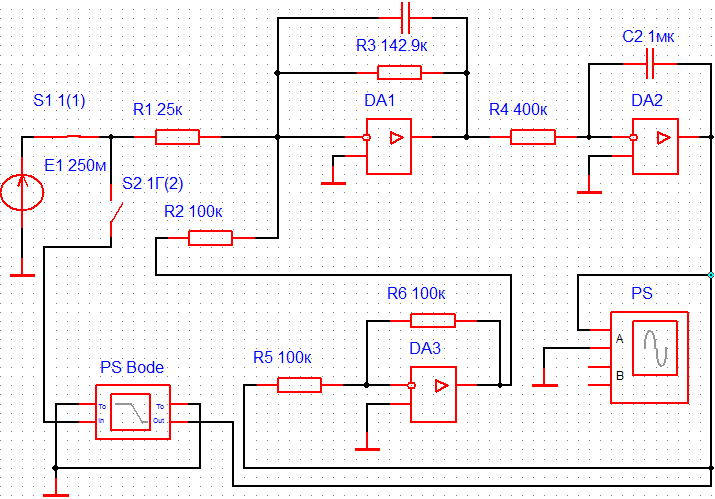 Рисунок 26 – Схема для исследования звена второго порядка 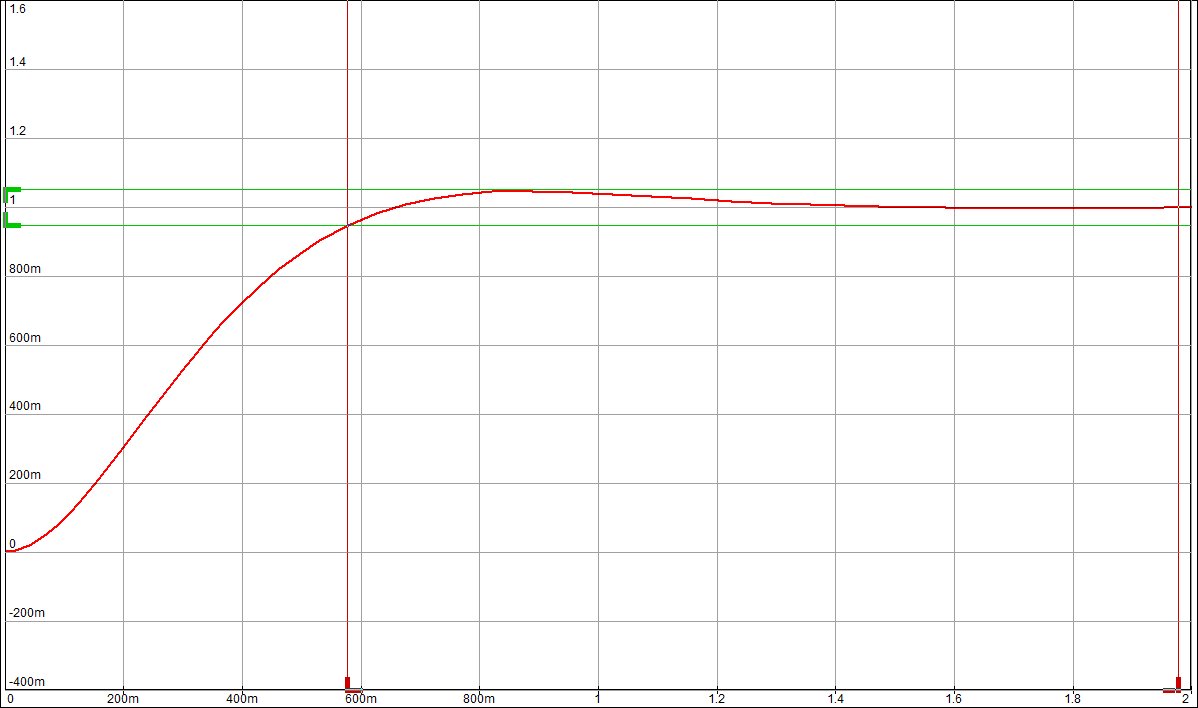 Рисунок 27 – Переходная характеристика звена второго порядка (при 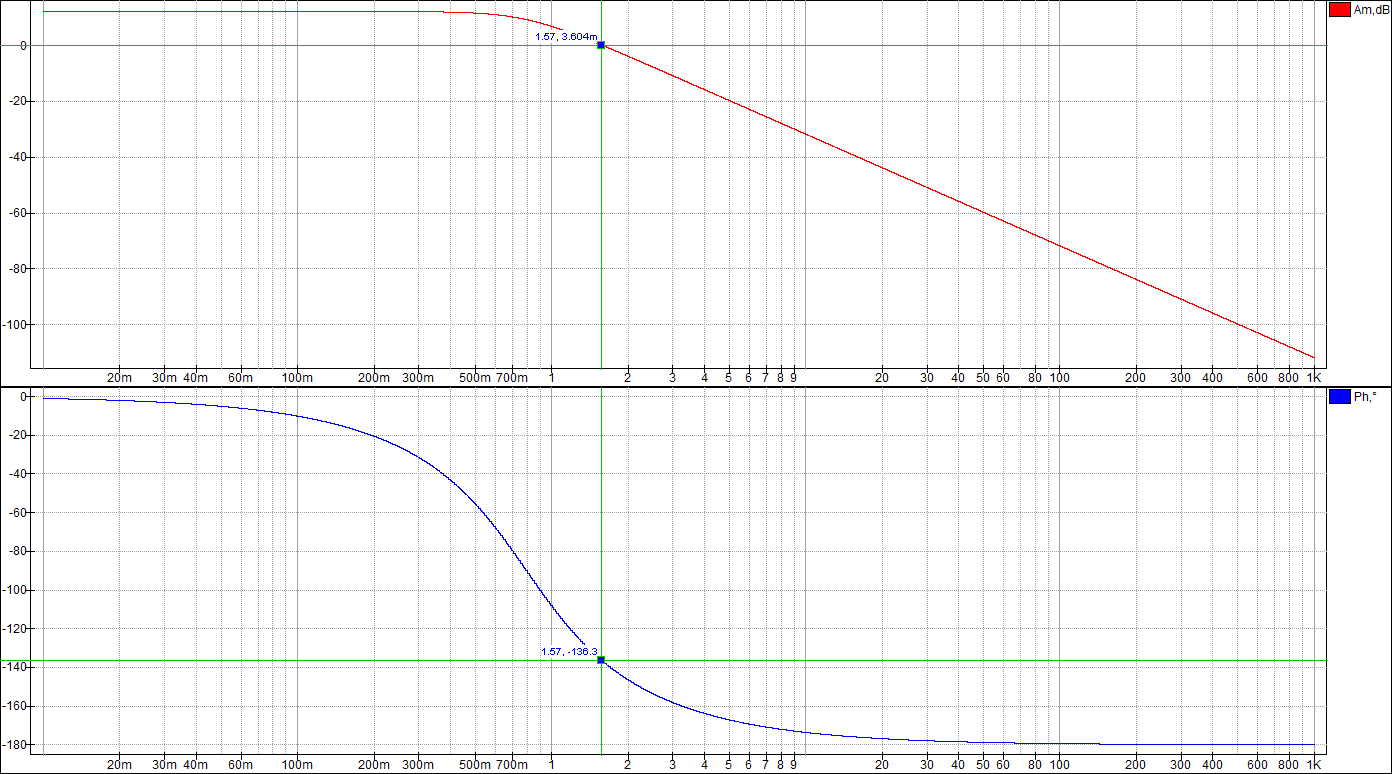 Рисунок 28 – ЛАЧХ и ЛФЧХ звена второго порядка (при 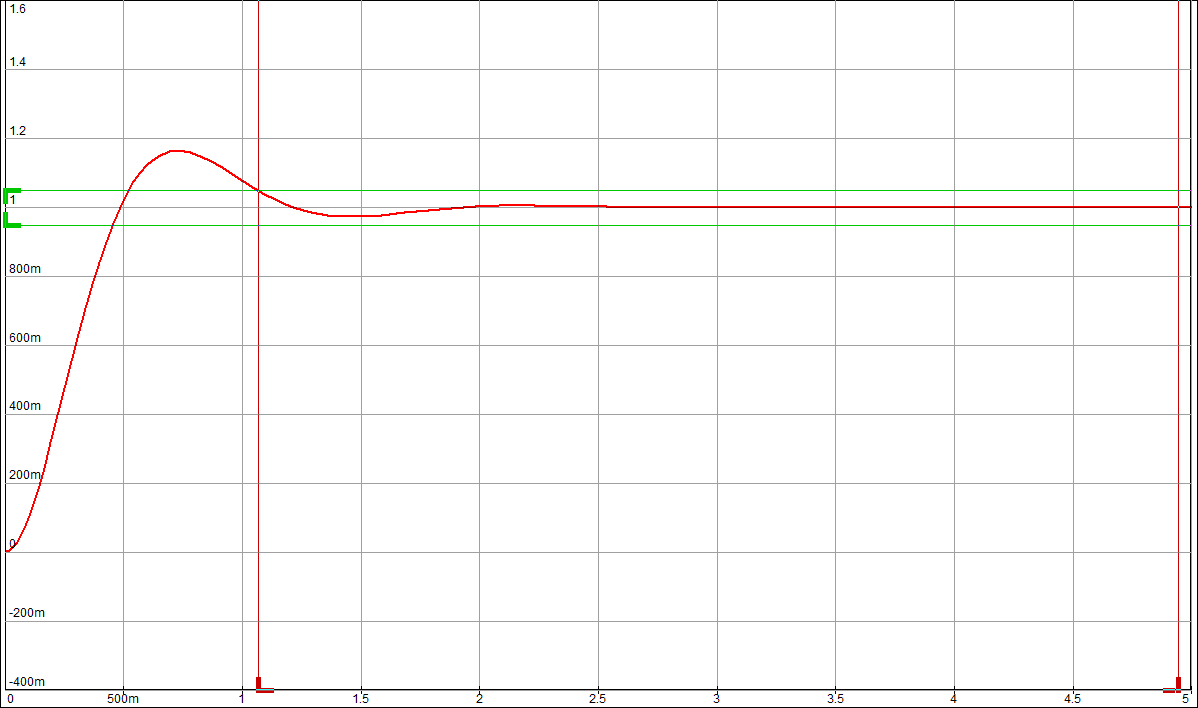 Рисунок 29 – Переходная характеристика звена второго порядка (при 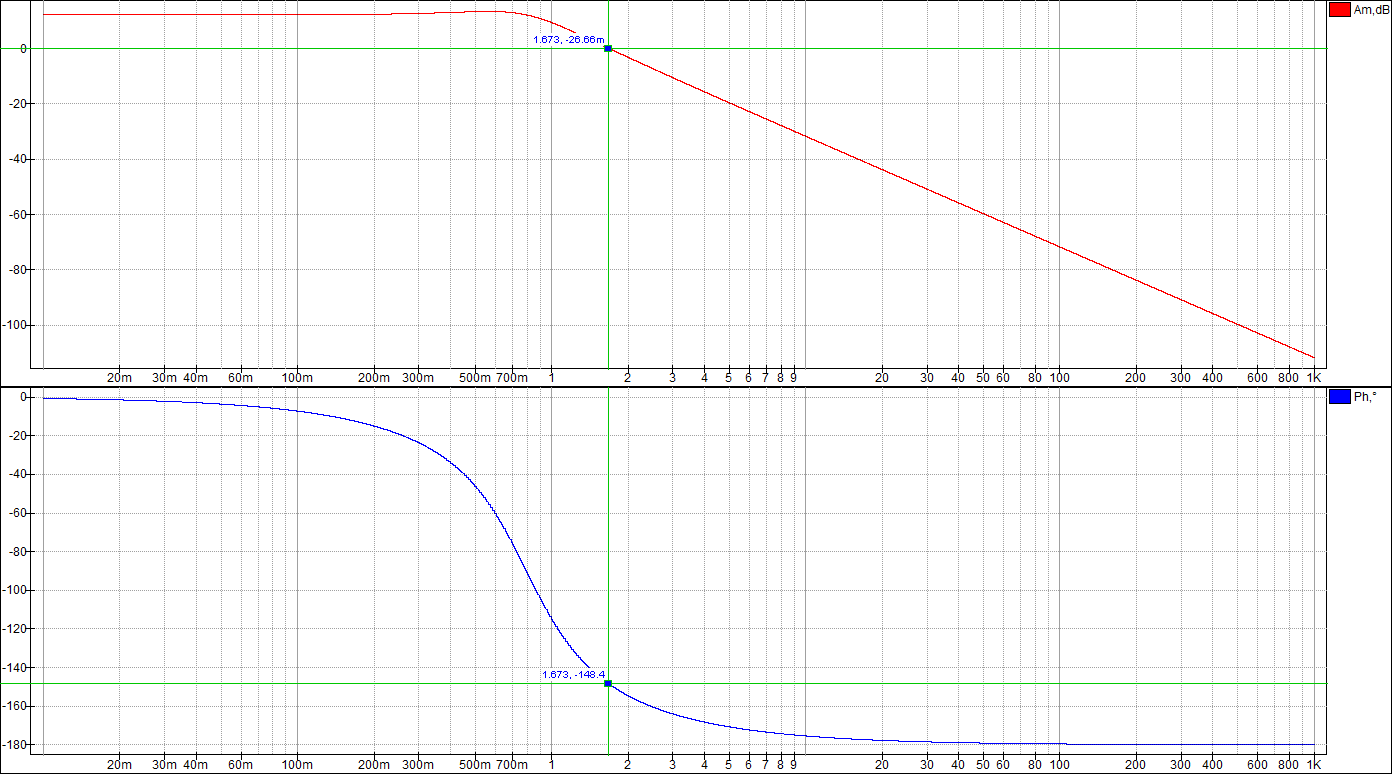 Рисунок 30 – ЛАЧХ и ЛФЧХ звена второго порядка (при 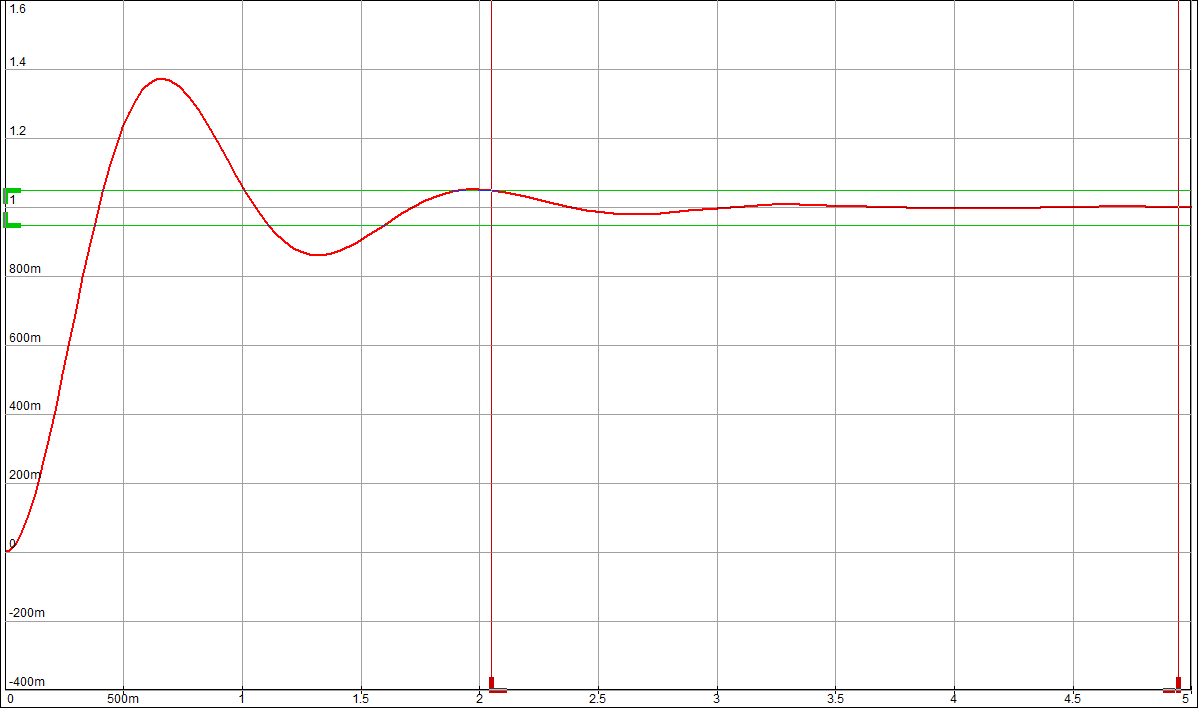 Рисунок 31 – Переходная характеристика звена второго порядка (при 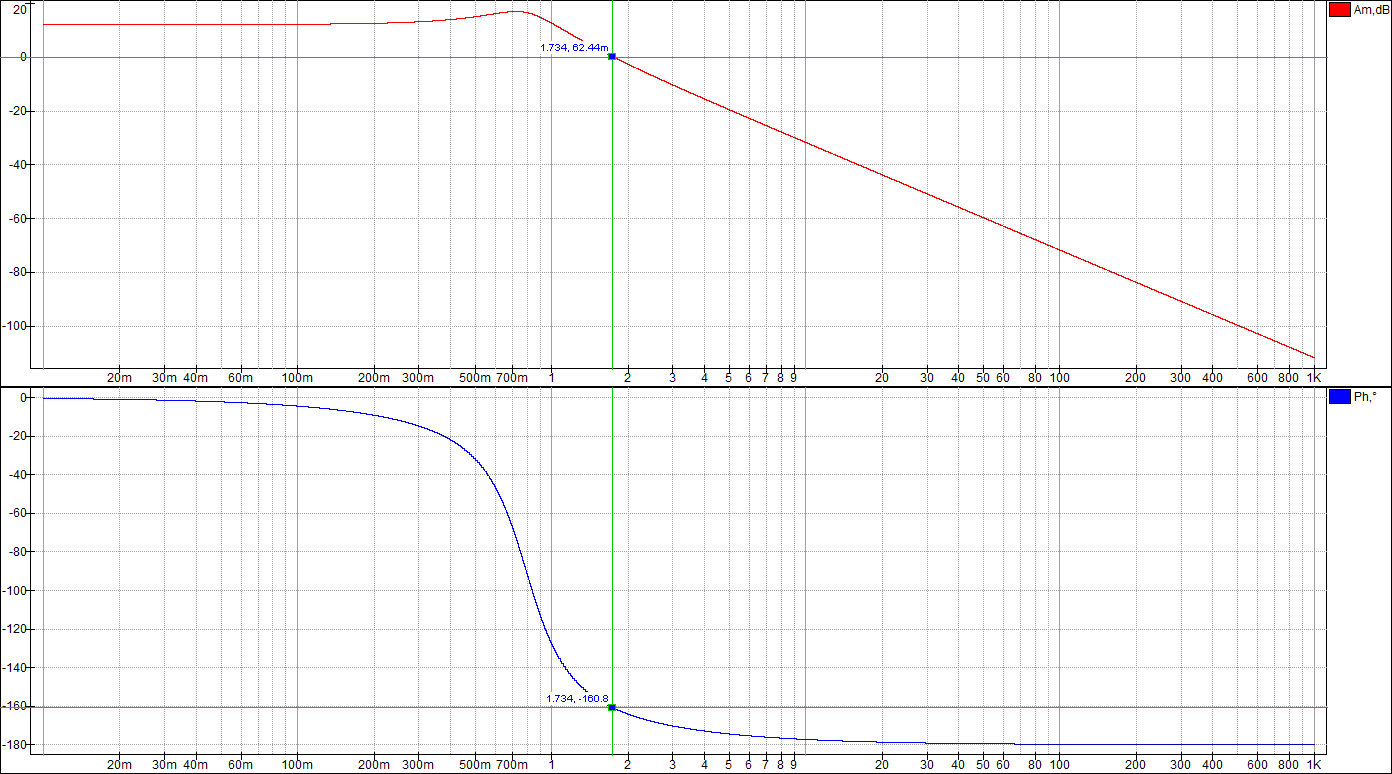 Рисунок 32 – ЛАЧХ и ЛФЧХ звена второго порядка (при 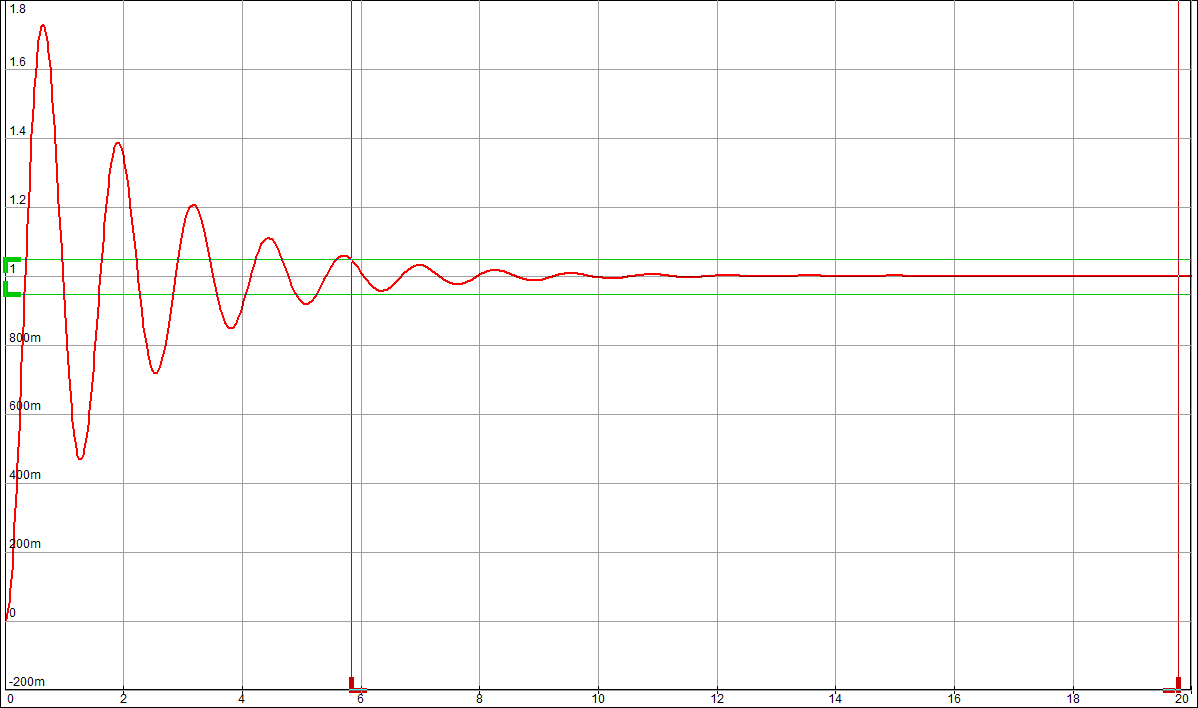 Рисунок 33 – Переходная характеристика звена второго порядка (при 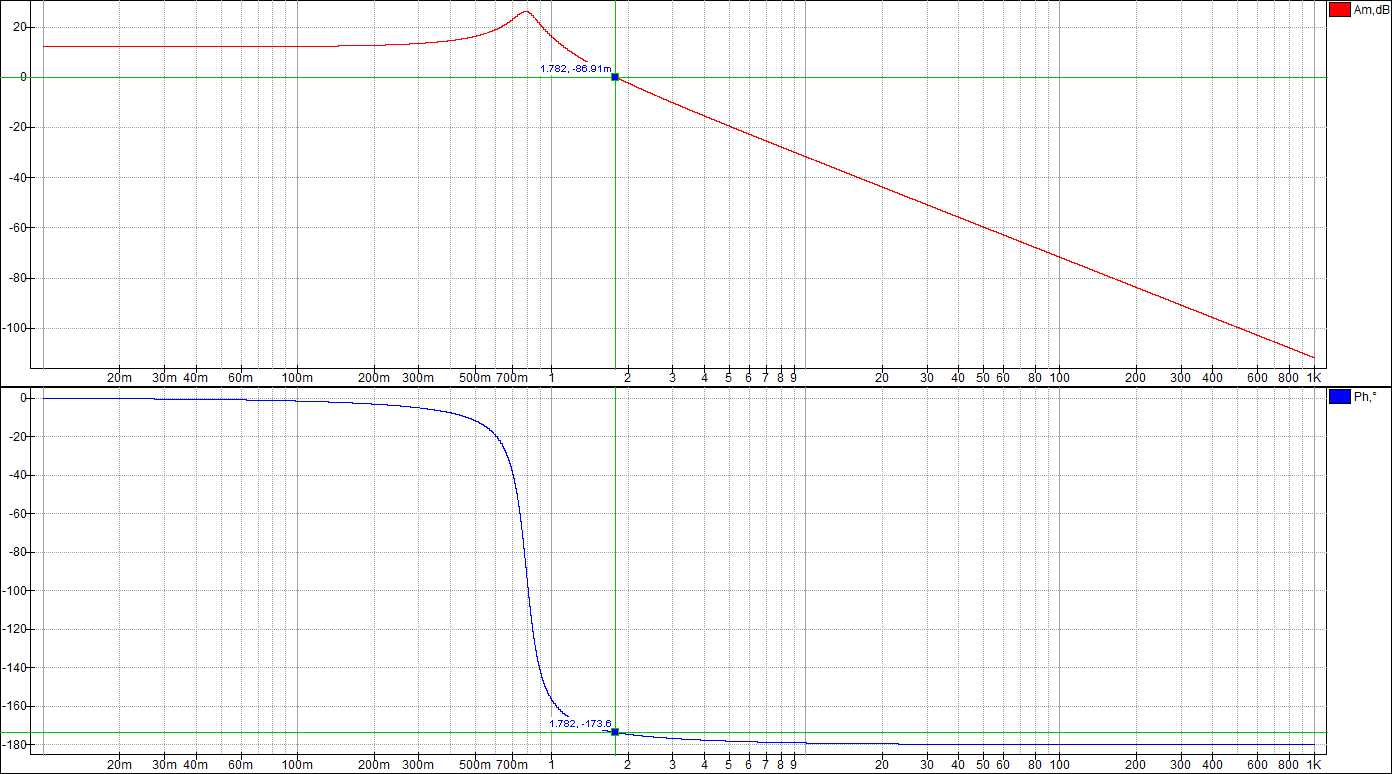 Рисунок 34 – ЛАЧХ и ЛФЧХ звена второго порядка (при 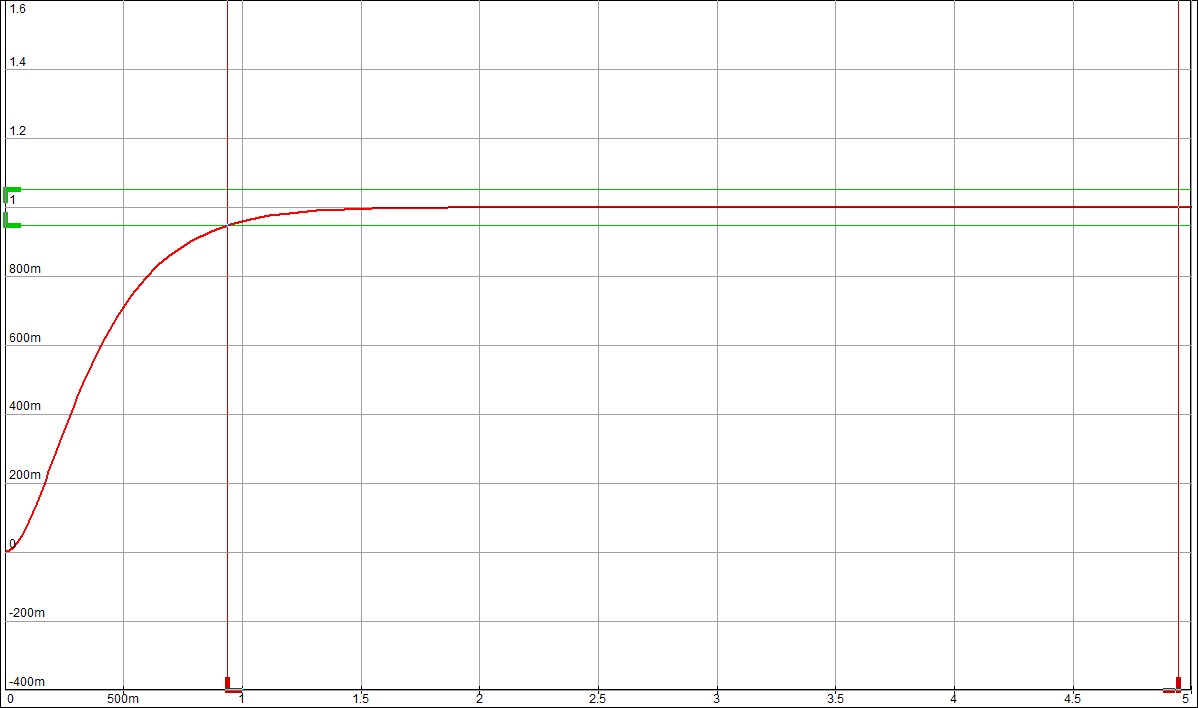 Рисунок 35 – Переходная характеристика звена второго порядка (при 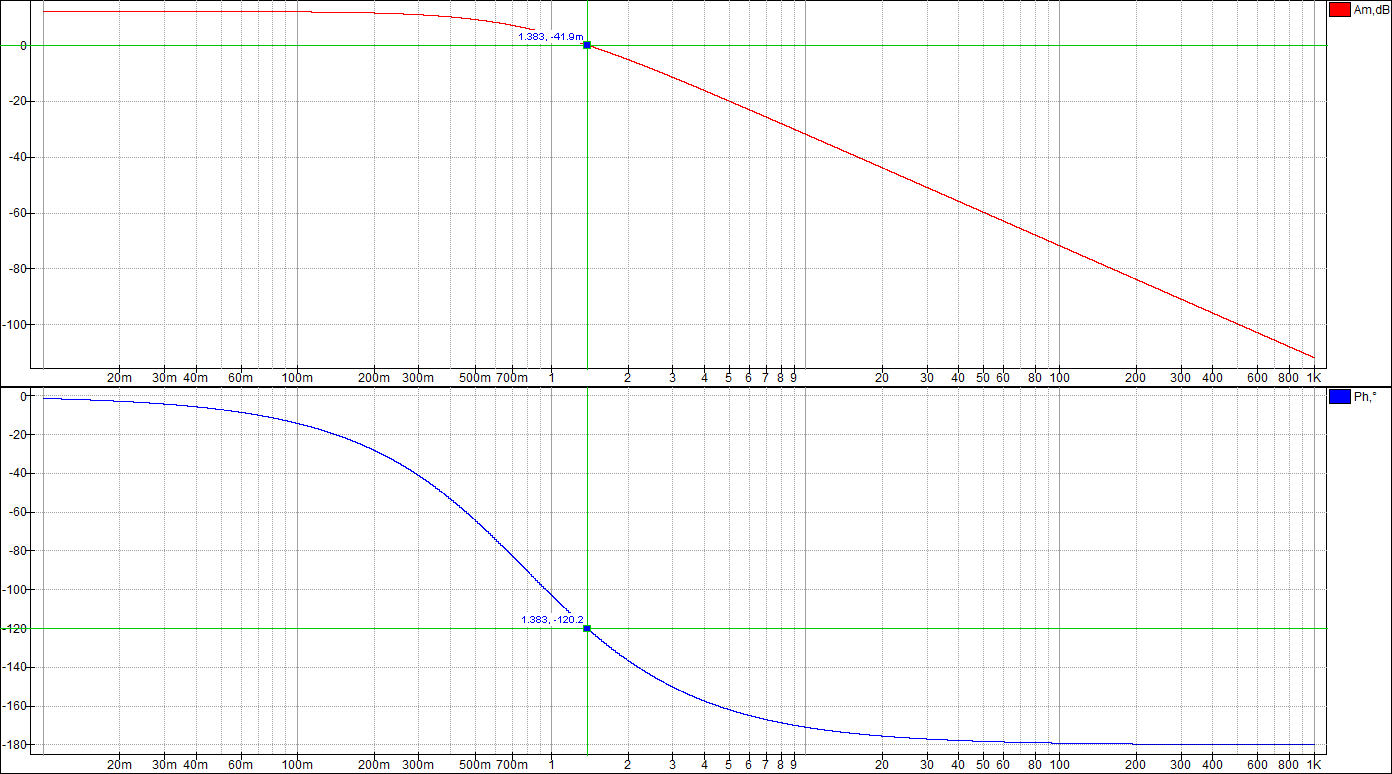 Рисунок 36 – ЛАЧХ и ЛФЧХ звена второго порядка (при 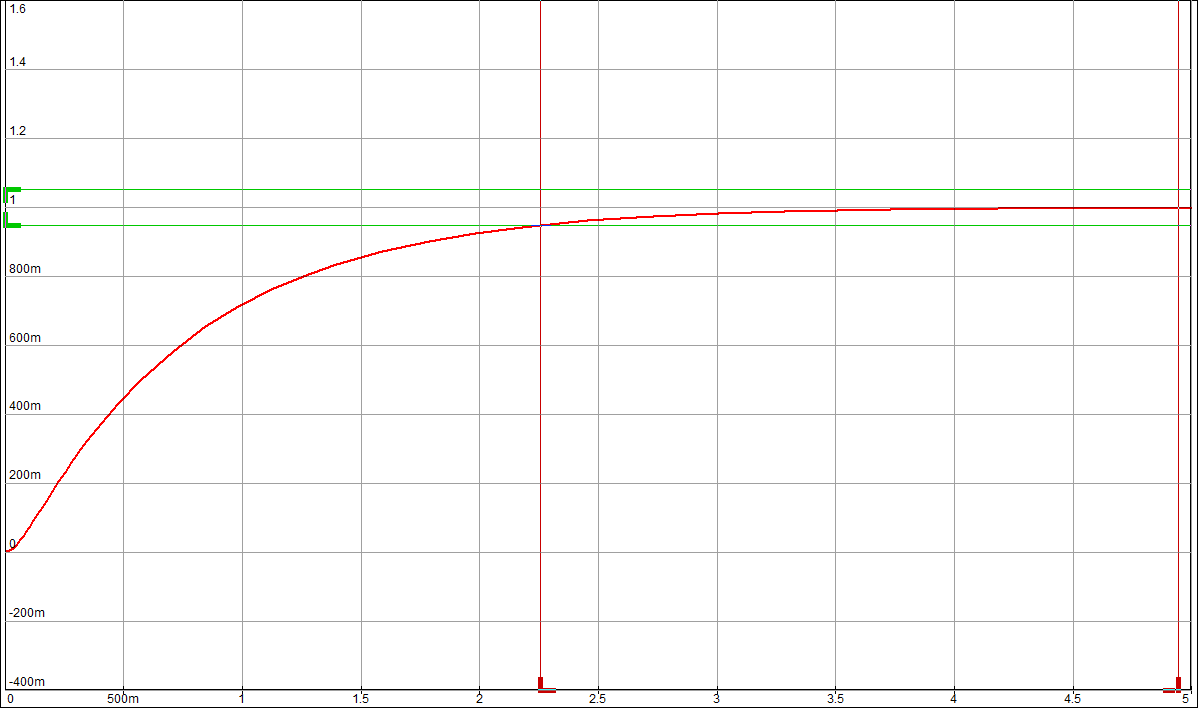 Рисунок 37 – Переходная характеристика звена второго порядка (при 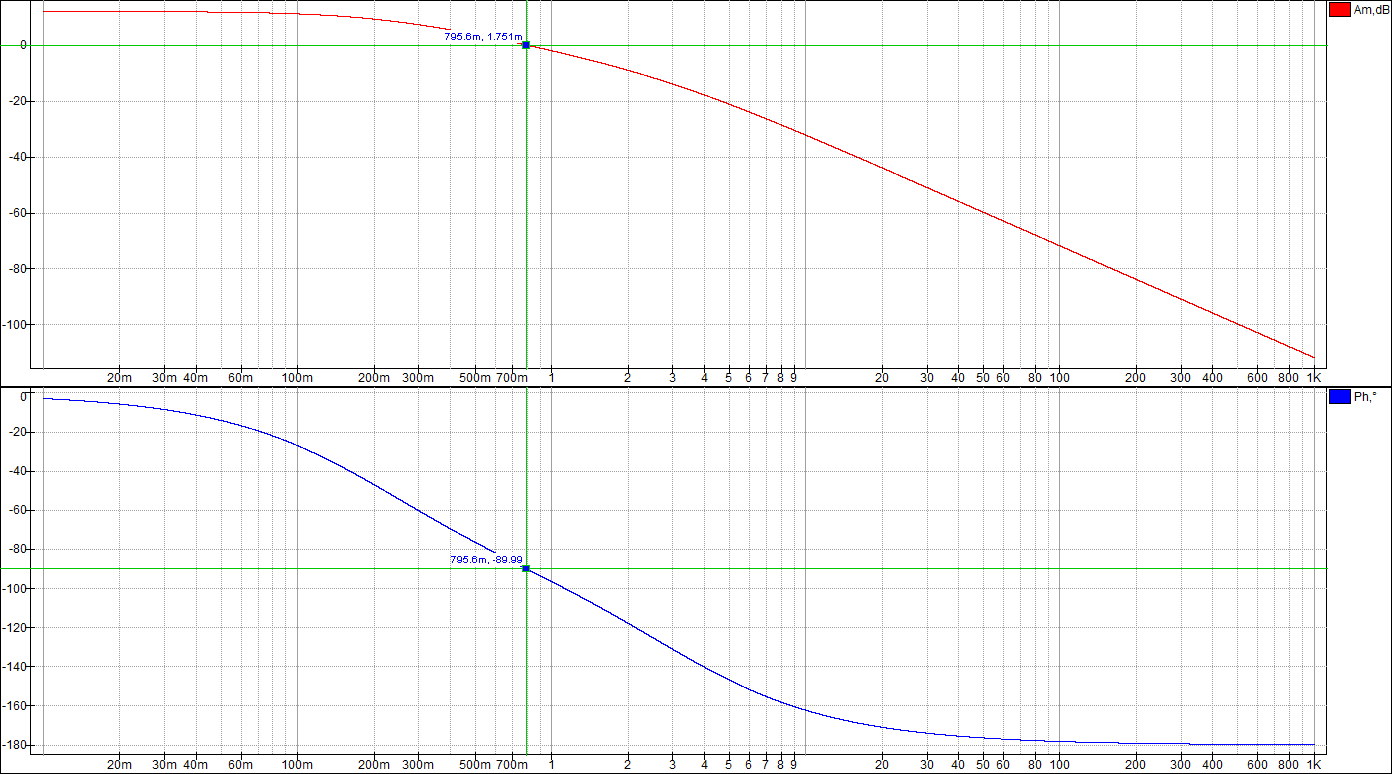 Рисунок 38 – ЛАЧХ и ЛФЧХ звена второго порядка (при 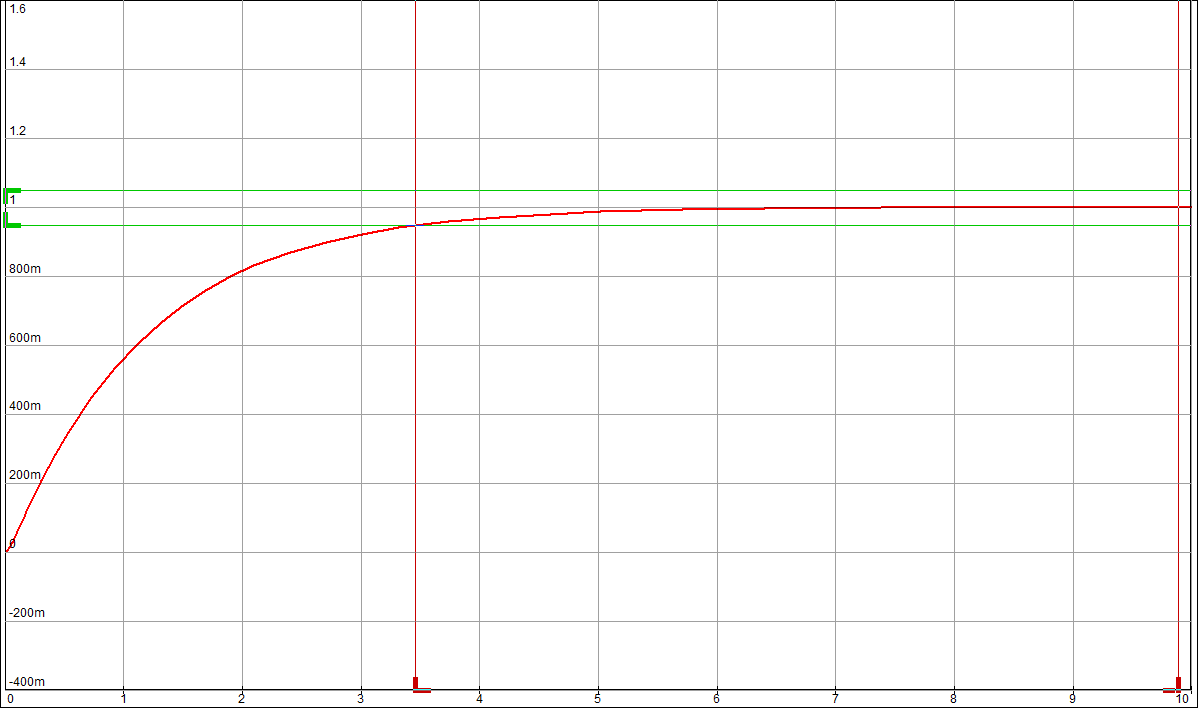 Рисунок 39 – Переходная характеристика звена второго порядка (при 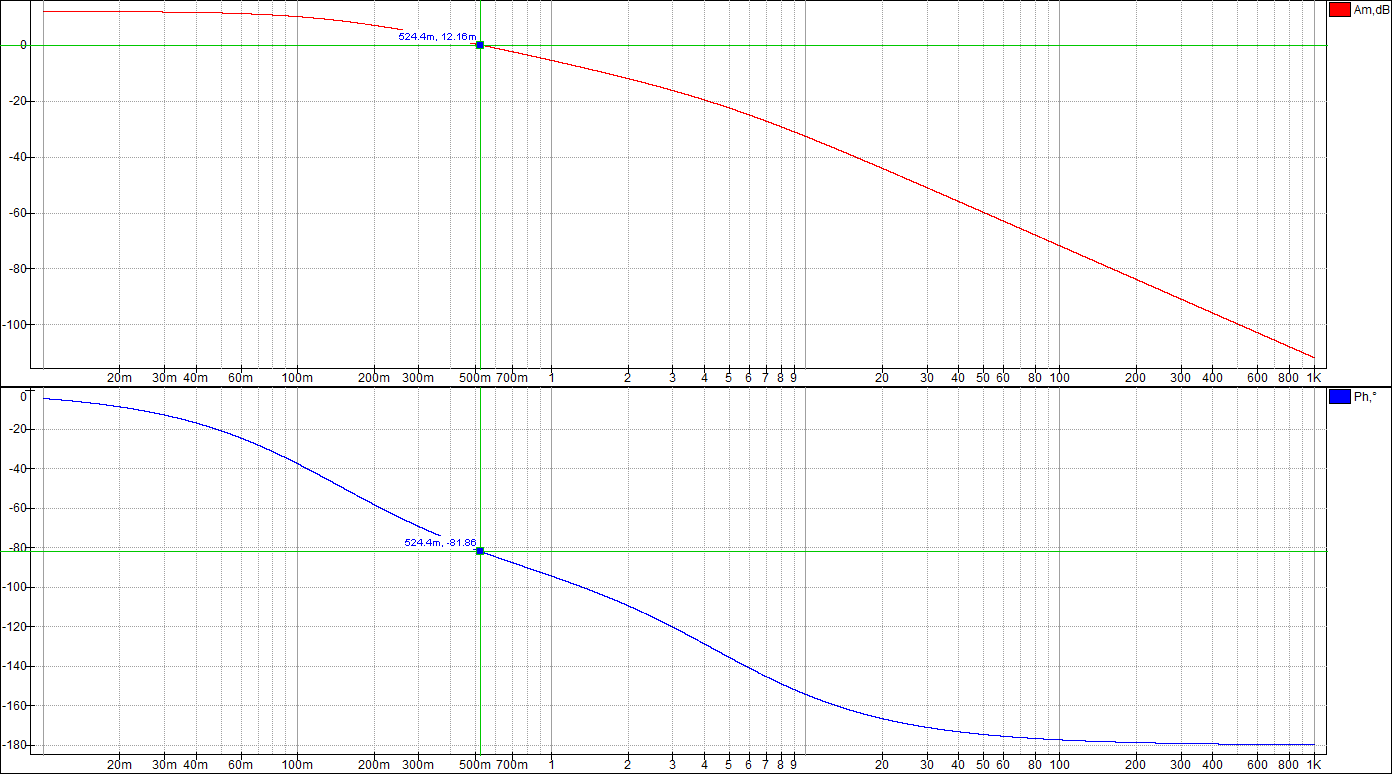 Рисунок 40 – ЛАЧХ и ЛФЧХ звена второго порядка (при Таблица 3 – Таблица найденных значений
По таблице значений построим графики зависимостей.  Рисунок 41 – График зависимости  Рисунок 42 – График зависимости  Рисунок 43 – График зависимости  Рисунок 44 – График зависимости  Рисунок 45 – График зависимости Выводы при увеличении значения - время переходного процесса уменьшается при увеличении - перерегулирование уменьшается, а при - частота среза уменьшается; - фаза и запас устойчивости по фазе возрастают. 1. Как количественно величина постоянной времени связана с временем переходного процесса в инерционном звене? Время переходного процесса где В инерционном звене корень равен откуда Откуда, время переходного процесса меньше или равно трём постоянным времени. 2. Как изменятся характеристики инерционного форсирующего звена при τ>T и его реализация на электронной модели? При τ>T реализация на электронной модели инерционного форсирующего звена будет иметь вид (рисунок 46) 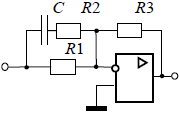 Рисунок 46 – Электронная модель инерционного форсирующего звена при τ>T Переходная характеристика будет иметь вид (рисунок 47). При t=0 переходная характеристика будет иметь начальный скачок, равный 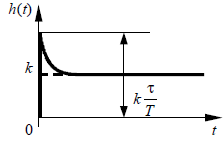 Рисунок 47 – Переходная характеристика инерционного форсирующего звена при τ>T ЛАЧХ и ЛФЧХ будут иметь вид (рисунок 48). При τ > T наклон ЛАЧХ +20 дБ/дек после частоты сопряжения 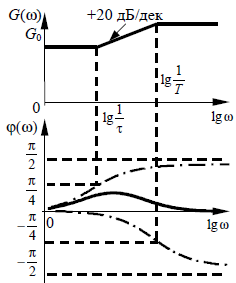 Рисунок 48 – ЛАЧХ и ЛФЧХ инерционного форсирующего звена при τ>T 3. В каком случае колебательное звено становится консервативным и как при этом изменятся его характеристики? Колебательное звено становится консервативным при Переходная характеристика будет иметь вид незатухающих колебаний (рисунок 49) 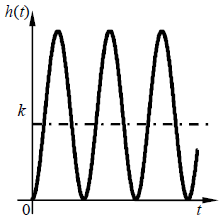 Рисунок 49 – Переходная характеристика консервативного звена Логарифмические частотные характеристики консервативного звена изображены на рисунке 50. Точная ЛАЧХ (сплошная линия) терпит разрыв непрерывности второго рода на частоте сопряжения 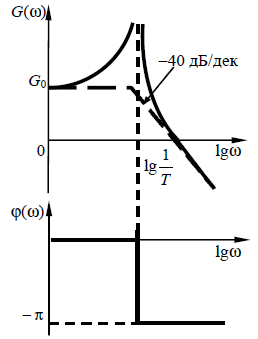 Рисунок 50 – ЛАЧХ и ЛФЧХ консервативного звена 4. Как нужно изменить схему, приведенную на рис. 51, чтобы получить электронную модель консервативного звена? 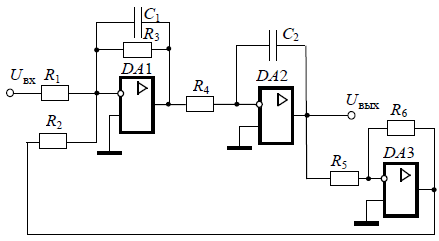 Рисунок 51 – Устройство на операционных усилителях В устройстве, схема которого приведена на рис. 51, в соответствии с формулой: получение консервативного звена возможно при 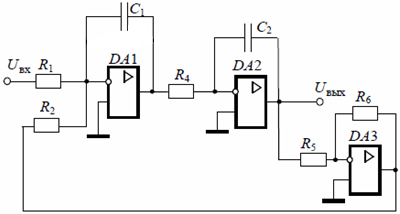 Рисунок 52 – Электронная модель консервативного звена 5. Чему равен запас устойчивости по амплитуде в звеньях второго порядка? Запас устойчивости по амплитуде определяется на частоте, при которой ЛФЧХ равна –π. ЛФЧХ звеньев второго порядка асимптотически приближается к значению –π. Откуда получаем, что устойчивости по амплитуде в звеньях второго порядка равен бесконечности. 6. Чем объяснить наличие точки перегиба на переходной характеристике апериодического звена второго порядка? По формуле разложения:  , ,получим расчетное выражение для переходной функции апериодического звена второго порядка. Для него: тогда  . .Наличие точки перегиба на переходной характеристике апериодического звена второго порядка объясняется суммированием двух экспоненциальных составляющих. |