Элек привод. 1. Общие вопросы электропривода
 Скачать 0.6 Mb. Скачать 0.6 Mb.
|

|
1. Общие вопросы электропривода Электропривод (ЭП) – это электромеханическое устройство, предназначенное для преобразования электрической энергии в механическую, передачи этой механической энергии к рабочим органам машины. Электропривод состоит (см. рис.2):  Рис.2 Структурная схема электропривода Классификация электроприводовРазличают три разновидности электроприводов: Групповой – от одного электродвигателя через трансмиссию приводятся в действие несколько рабочих машин (РМ). Сейчас практически не применяется. Применялся из-за нехватки электродвигателей. Основной недостаток – невозможность приспособить привод для каждой рабочей машины одновременно, т.к. характеристики всех машин различны. Сложная кинематическая схема. 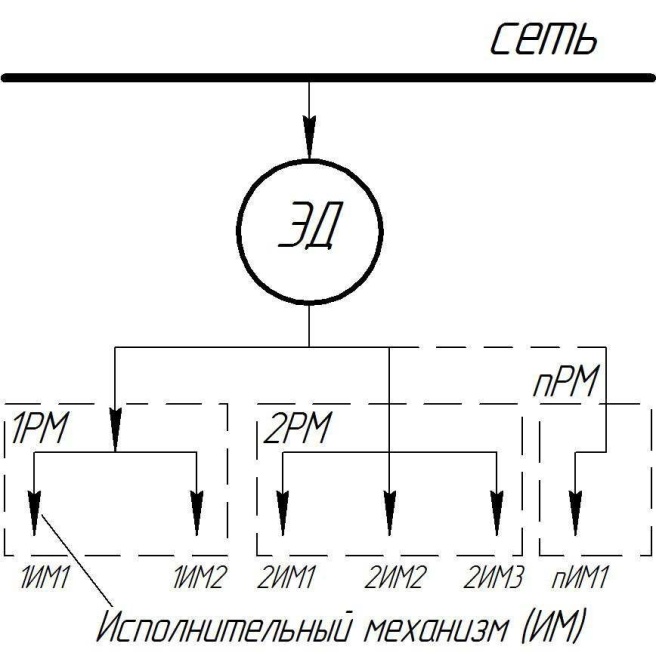 Рис.3 Схема группового электропривода Одиночный - от одного электродвигателя приводится в действие одна отдельная машина и все ее рабочие органы (транспортеры, вентиляторы, насосы, корморезки и др.). Этот привод в большей степени, чем групповой, приспособлен к машине, процессу. Недостатки: не полностью удовлетворяет требования сложной машины. Поэтому приходится конструировать сложные передаточные механизмы. В большей степени приемлем для простых машин – вентиляторы, насосы и подобные им. 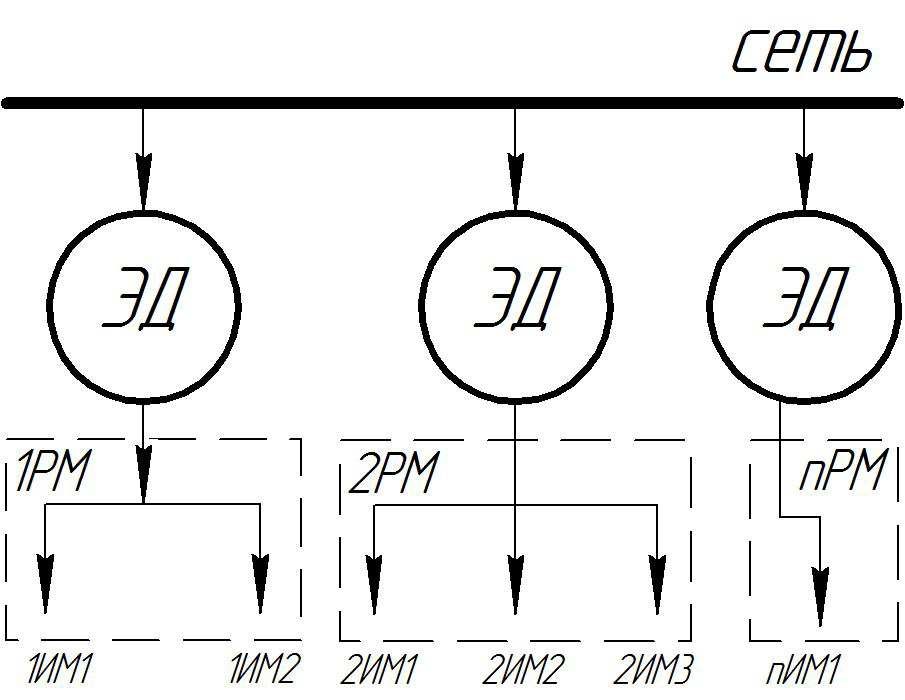 Рис.4 Схема одиночного привода Многодвигательный – отдельные рабочие органы одной машины приводятся в действие от отдельных электродвигателей – сложные обрабатывающие станки, кормоприготовительные агрегаты, пресс-брикетировщики, сушилки, корморезки и др. Может быть: - простой; - индивидуальный; - агрегатный; - поточной линии. Преимущества: – наиболее полно удовлетворяет требованиям технологических условий; – резко упрощается кинематическая схема машины; 3 – возможна полная автоматизация процесса. Недостатки (относительные) – требуется значительное количество ЭД, что для сельского хозяйства пока еще представляет определенную сложность. Кроме того, различают регулируемый и нерегулируемый электропривод – у которого скорость регулируется или не регулируется. По роду тока – постоянного и переменного тока. По степени управляемости – автоматизированный, полуавтоматизированный или ручного управления. 2. Анализ механических характеристик рабочих машин и электрических двигателейМеханическая характеристика рабочей машины- зависимость статического момента сопротивления «Мс», создаваемого рабочими органами машины, от угловой скорости вала машины или частоты его вращения: Мс= ƒ(ω) или Мс= ƒ(n). 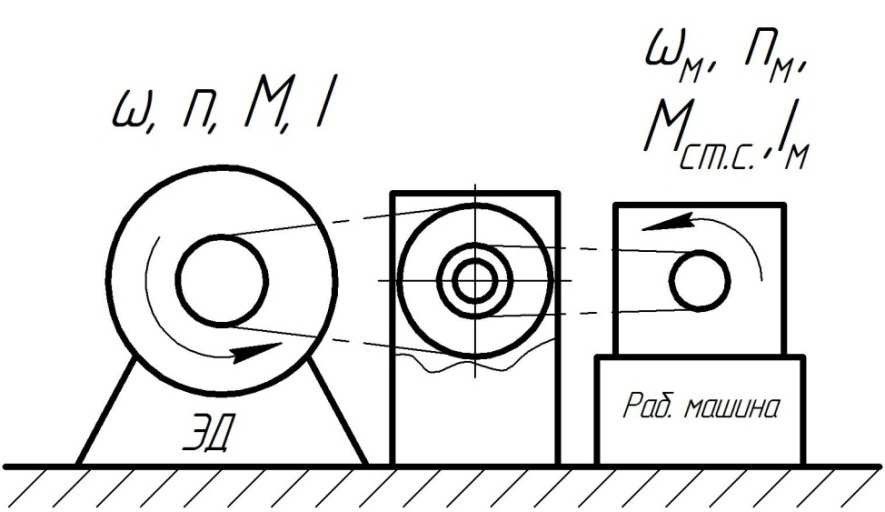 Рис.5 Схема привода рабочей машины Мс= ƒ(ω) часто используется для расчета времени разгона и торможения, дает представление о моментах трогания машины с места (рис.6) 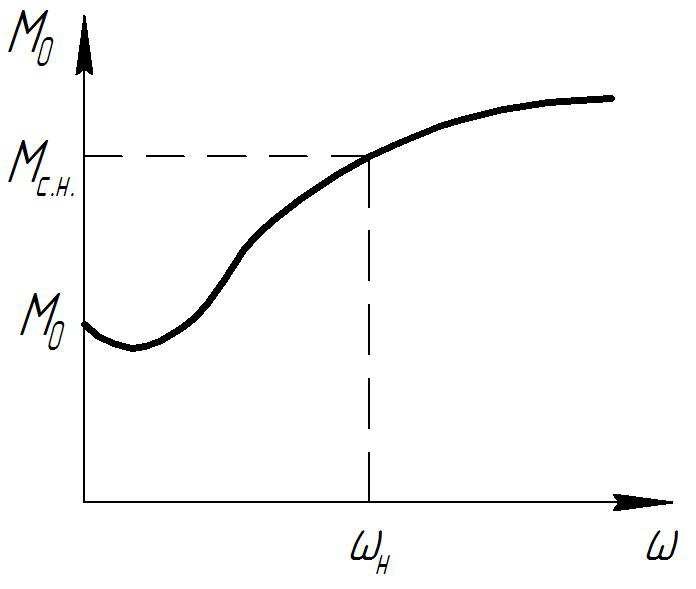 Рис.6 График механической характеристики рабочей машины Для каждой машины имеется своя характеристика. Но некоторые схожие машины одинакового принципа действия можно объединить в отдельные группы идеализированных механических характеристик. Для всех машин получено обобщенное уравнение вида: ωх (1) Мс = Мо+ (Мс.н – Мо)⋅ ωн где Мс – момент сопротивления при данной угловой скорости «ω»; Мо – момент сопротивления при трогании, т.е. при «ω=0»; Мс.н – номинальный момент сопротивления, т.е. при номинальной угловой скорости ωн; ω – текущее значение угловой скорости; х – коэффициент, характеризующий изменение момента сопротив- ления при изменении угловой скорости - х = -1; 0; 1; 2. Это эмпирическое уравнение справедливо для разных групп рабочих машин и распределение по группам определяется принятым значением коэффициента «х». В зависимости от «х» рабочие машины по механическим характеристикам могут быть разбиты на 4 группы (рис.7): П 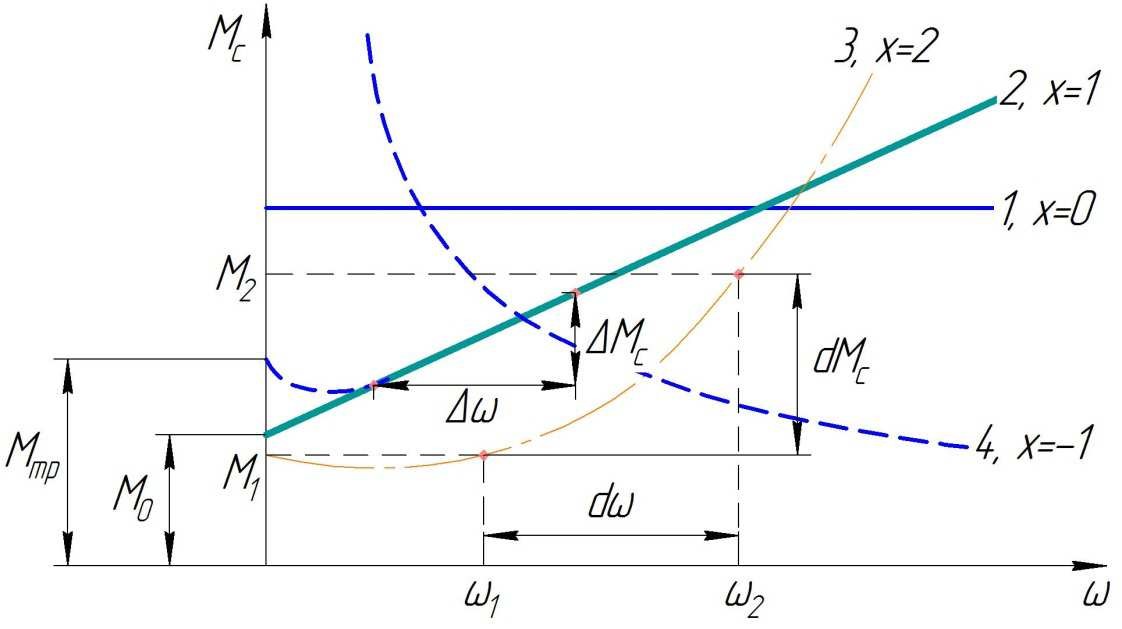 ри ри  – линейно возрастающая механическая характеристика - момент сопротивления линейно возрастает в зависимости от угловой скорости. Обычно такая характеристика у машин, работающих с небольшой скоростью – вакуумные насосы доильных машин и др. – линейно возрастающая механическая характеристика - момент сопротивления линейно возрастает в зависимости от угловой скорости. Обычно такая характеристика у машин, работающих с небольшой скоростью – вакуумные насосы доильных машин и др.  – нелинейно возрастающая (параболическая) характеристика. Обычно называют вентиляторной, поскольку у вентиляторов момент сопротивления зависит от квадрата скорости. Также - центробежные насосы, молочные сепараторы, молотильные барабаны при работе на холостом ходу и др. – нелинейно возрастающая (параболическая) характеристика. Обычно называют вентиляторной, поскольку у вентиляторов момент сопротивления зависит от квадрата скорости. Также - центробежные насосы, молочные сепараторы, молотильные барабаны при работе на холостом ходу и др.  – нелинейно-спадающая характеристика. Момент сопротивления изменяется обратно-пропорционально скорости, а мощность, потребляемая механизмом, остается постоянной. – нелинейно-спадающая характеристика. Момент сопротивления изменяется обратно-пропорционально скорости, а мощность, потребляемая механизмом, остается постоянной. Такой характеристикой обладают некоторые токарные, расточные, фрезерные и другие металлорежущие станки, нории, элеваторы. Реальные характеристики несколько отличаются от этих идеализированных, но условное деление в данном случае допускается. 1.6 Жесткость Степень изменения скорости с изменением момента для различных машин различна и характеризуется жесткостью их механических характеристик. Жесткость механической характеристики – отношение разности моментов к соответствующей разности угловых скоростей βс = (Мс2 – Мс1)/(ω2 – ω1) = ∆Мс/∆ω (2) В случае нелинейных характеристик их жесткость непостоянна и определяется в каждой точке как производная момента по угловой скорости βс = dМc/dω(3) При х=0 βс = 0 – абсолютно жесткая характеристика; х=1 βс > 0 – постоянная (const); х=2 βс = ∆Мс/∆ω = tgα х=-1 βс = ∆Мс/∆ω < 0. Механической характеристикой электродвигателяназывают зависимость вращающего или тормозного момента от скорости М = ƒ(ω) или М = ƒ(υ) Механические характеристики электродвигателей могут быть естественные и искусственные. Естественной механической характеристикой обладает каждый ЭД. Она получается при номинальных параметрах питающей сети и электродвигателя, т.е. выполняются условия U =Uн = const; f = fн = сonst; r2 = const – сопротивления, введенные в цепь ротора, отсутствуют, т.е. R=0; Соединение обмоток ЭД соответствует указанной схеме заводаизготовителя. Искусственные характеристики получаются при изменении параметров сети или схемы соединения обмоток, включения добавочных сопротивлений в обмотки статора или ротора ЭД. Эти характеристики создаются специально, когда естественная характеристика ЭД не удовлетворяет требованиям приводимого в движение механизма или машины, например, пуск двигателя с тяжелым механизмом. По жесткости механические характеристики ЭД можно разделить на четыре основные категории. Абсолютно жесткая – это характеристика, при которой скорость с изменением момента остается постоянной (синхронные двигатели, двигатели постоянного тока с компаундной – смешанной, обмоткой возбуждения). Для них β = ∞ (рис.8, характеристика 1). 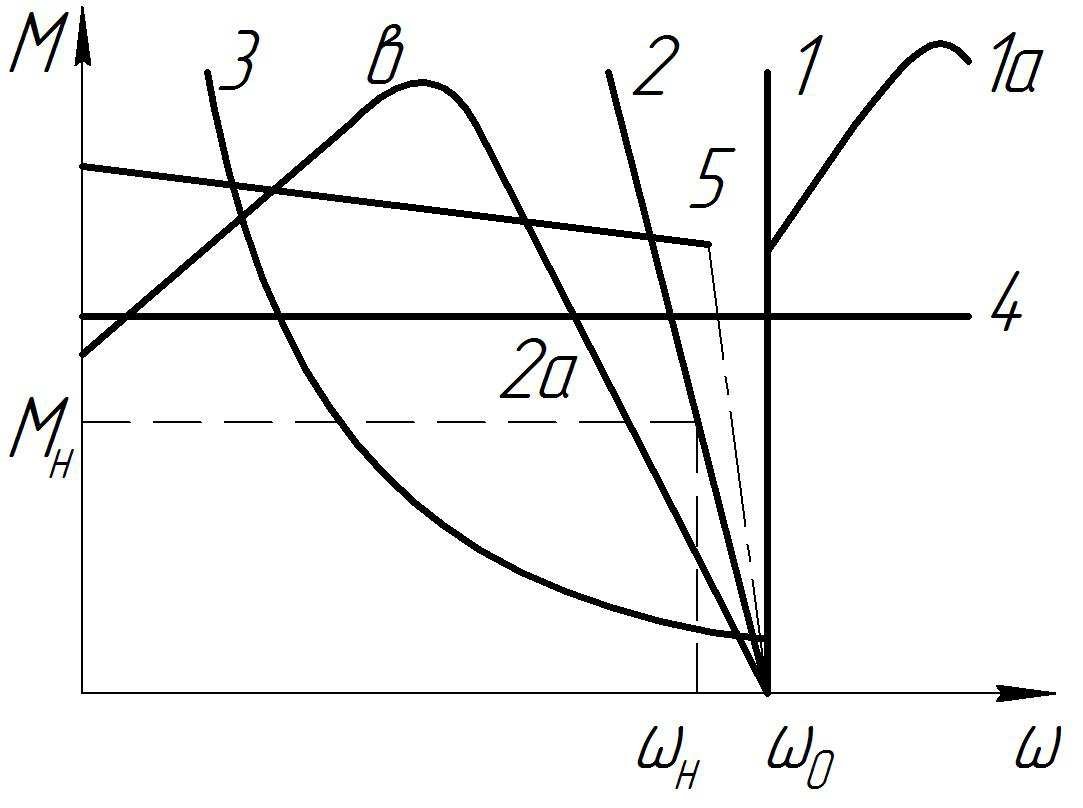 Рис.8 Механические характеристики электрических двигателей Жесткая – характеристика, при которой незначительное изменение скорости вызывает значительное изменение момента (кривая 2, рис.8). Такой характеристикой обладают «шунтовые» двигатели постоянного тока (с параллельной обмоткой возбуждения), а также асинхронные двигатели в пределах рабочей ветви механической характеристики. Мягкая – характеристика, при которой с изменением момента скорость изменяется значительно. Ею обладают «сериесные» двигатели постоянного тока (с последовательной обмоткой возбуждения). Абсолютно мягкая – характеристика, при которой момент двигателя с изменением угловой скорости остается постоянным. Такой характеристикой обладают двигатели постоянного тока независимого возбуждения при питании их от постороннего источника тока. Их называют специальными характеристиками. Они имеют особую форму, приспособленную для тех или иных рабочих машин. Примером может служить кривая 5 (рис.8) –«экскаваторная» характеристика. |