автоматизация_процесса_первой_стадии_нейтрализации_фосфорной_кис. 1 Постановка задачи
 Скачать 4.09 Mb. Скачать 4.09 Mb.
|

|
Hп= Высота жидкостной части сепаратора складывается из высоты ввода парожидкостной смеси над уровнем жидкости (hB), высоты гиперболической части воронки жидкости, образующейся в сепараторе (h'), критического уровня жидкости над циркуляционной трубой (hкр). С целью уменьшения образования вторичной пены принимают hв = 0,2 м. Рассчитываем высоту h' h'= (w'ж/2θg)2[(dc/dц т.р)2θ – 1], (10) где w'ж – средняя скорость жидкой фазы на входе в сепаратор, м/с; θ – коэффициент трения пульпы о стенки аппарата; g – гравитационная постоянная; dц т.р – диаметр циркуляционной трубы, м. Значения w'ж рассчитывают по формуле (4), а θ принимают равным 0,4. h'= Критический уровень жидкости над циркуляционной трубой Hкр = 0,789 w'ж 0.545d0.78ц. тр, (11) где wж — скорость циркуляции жидкой фазы, определяемая по уравнению (3), м/с. Hкр = В настоящее время разработан ряд типоразмеров аппаратов САИ различной производительности. Некоторые характеристики этих аппаратов приведены в таблице 2.
4 ВЫБОР И РАСЧЕТ ЭЛЕМЕНТОВ СИСТЕМЫ Цель: выбор схемы автоматизации контроля и управления расходом фосфорной кислоты и аммиака, поступающих в нейтрализатор с коррекцией расхода фосфорной кислоты для обеспечения заданного pH пульпы. В недавнее время контроль и управления этой технологической операции осуществлялся частично. Контроль расхода жидкостей велся с помощью морально устаревших приборов КИПиА. Проблема состоит в том, что приборы имеют большую погрешность измерений, из-за этого осложняется контроль расходом, что приводит к ухудшению качества продукта. Вследствие падение производительности, повышение себестоимость продукта. Выбор микроконтроллера и расчет передаточной функции Микроконтроллер в системе должен выполнять функцию обработки сигнала, поступающего с датчика, и выдавать соответствующее значение на выработку управляющего сигнала. На вход программируемых логических контроллеров ПЛК от датчика поступают измеренные значения величин pH пульпы, характеризующих производственный процесс. Контроллеры реализуют заданные функции контроля и выдают результаты на экран дисплея рабочей станции оператора и управляющие воздействия на ПБР объекта автоматизации. В разрабатываемой системе будет установлен микроконтроллер YOKOGAWA UT750 в силу наличия у него всех требуемых компонентов и достаточной производительности работы. Контроллер UT750 – это интеллектуальный прибор на базе микропроцессора с мощными возможностями управления, функцией пользовательских вычислений и удобным большим цифровым дисплеем. Конфигурация указанных функций производится с клавиатуры на лицевой панели контроллера. Кроме того, стандартно встроены 13 типов алгоритмов регулирования, а также функция подавления перерегулирования "SUPER", функция подавления рыскания "SUPER 2" и автонастройка. Программируемый контроллер UT 750 фирмы YOKOGAWA работает в реальном масштабе времени и может быть использован для построения узлов локальной автоматики, и узлов, поддерживающих обмен данными через сети. Программируемый высоко быстродействующий контроллер характеризуются выполнение различных видов управления: Непрерывное одноконтурное, двухконтурное или каскадное ПИД- регулирование; Непрерывное каскадное ПИД- регулирование; Управление в режиме ВКЛ/ВЫКЛ; Пропорциональное управление. Таблица 3 - Технические характеристики
Пользовательские вычисления позволяют просто запрограммировать прибор под конкретное приложение. Функциональные блоки включают в себя арифметические, логические, специальные вычисления и так далее. Предусмотрены различные функции связи. Возможна установка связи с персональным компьютером, программируемым логическим контроллером и другими контроллерами. Характеристики сигналов ввода-вывода микроконтроллера UT750: Сигнал измерительного входа: Число точек входов 1 или 2. Выходное напряжения, В 36. Период дискретизации, мс 50, 100, 200 или 500 (по умолчанию 200). Входной ток смещения, мкА 0,05. Измерительный ток (RTD), мА 0,13. Входное сопротивление, МОм 1 или более. Допустимое сопротивление источника сигнала, Ом 250 или менее. Допустимое входное напряжение, В 24. Коэффициент шумоподавления, Гц 50/60. Собственный шум, дБ 40. Дополнительный сигнал аналогового входа: Период дискретизации, мс 100, 200 или 500. Погрешность входного сигнала, % от 0,2 до 0,4. Управляющие выходы Выходной сигнал постоянного тока, мА 4/20, 0/20, 20/4 20/0.. Точность выходного сигнала, % 0,1. Передаточная функция микроконтроллера: WМП(p)=1 (12) 4.2 Выбор частотного преобразователя и расчет передаточной функции Преобразователи частоты предназначены для преобразования трехфазного напряжения переменного тока, с постоянной частотой, в трехфазное напряжение с регулируемой частотой. Принцип работы преобразователя частоты построен на основании особенностей работы асинхронного двигателя. Предварительный выбор преобразователя проводится из соображений: - мощность двигателя должна быть больше мощности нагрузки; - типоразмер преобразователя частоты выбирается так, чтобы номинальный ток двигателя (In) был меньше тока на выходе преобразователя частоты (Iпч). Главным параметром при выборе преобразователя является потребляемый электрический ток двигателя, поскольку он определяет режим работы выходных силовых транзисторов. Полная выходная мощность преобразователя в этом случае должна выбираться больше или равной номинальной мощности электродвигателя. В качестве преобразователя частоты выберем Altivar 61, так как он удовлетворяет требованиям системы по техническим характеристикам.   а б Рисунок 14 – Преобразователь частоты Altivar 61. а) - внешний вид; б) блок схема асинхронного двигателя с частотным преобразователем ATV 61 используется для регулировки электропривода с асинхронным электродвигателем общепромышленного назначения. Вышеуказанный эффект достигается путём изменения частоты и амплитуды трёхфазного напряжения, поступающего на электродвигатель. За счет повышенной перегрузочной способности (до 130 %) Altivar 61 может применяться на приводах насоса. Altivar 61 контролирует отсутствие потока жидкости и позволяет ограничить скорость потока. Кроме этого, он имеет специальное исполнение для химически агрессивных сред. Наличие следующих функций в Altivar 61: - встроенный ПИД-регулятор; - "подхват на лету" вне зависимости от направления вращения двигателя; - отказоустойчивость: работа при 50 % просадке напряжения Технические характеристики преобразователя частоты Altivar 61: Мощностью электропривода, кВт от 0,75 кВт до 800. Номинальная частота коммутации, кГц 12. Выходная частота ω, Гц 52. Напряжение сети U, В 380. Передаточная функция частотного преобразователя: WЧП(p)=k, где k Напряжения U2, с выхода микроконтроллера составляет 36 В k WЧП(p)=10,5(5) (13) 4.3 Выбор электронасоса и расчет передаточной функции Насос - гидравлическая машина, служащая для преобразования энергии приводного двигателя в механическую энергию потока жидкости и ее перемещения в полость высокого давления. В результате проведения сравнительного анализа насосов различных типов и конфигураций был выбран электронасос типа ТХИ 90/49-1,0-2И-Щ-У2 с асинхронным двигателем переменного тока 5АМ250S4. Насос полупогружной, вертикальный. Предназначены для перекачивания химически активных взрывоопасных и легковоспламеняющихся жидкостей на предприятиях нефтехимической и химической отраслей промышленности. Без включений или содержащих твердые включения объемной концентрацией до 15% с размером частиц до 1 мм. Технические характеристики электронасоса: Глубина погружения насоса, м 1. Напор насоса, м 49. Подача насоса, м3/ч 90. Частота вращения насоса, об/мин 1450. Мощность насоса, кВт 24. Мощность электродвигателя, кВт 75. Кинематическая вязкость 10-6, м2/с до 30. Плотность, кг/м3 до 1850 Напряжение сети, В 380. Время запаздывания, с 2. Выходной сигнал насоса расхода кислоты - расход Q: - изменяется в переделах от, м 3/ч 0 ÷ 30. Входной сигнал – напряжение U, В 380. Характеристики перекачиваемой кислоты: Подача кислоты, м3/ч 30. Кинематическая вязкость кислоты, 10-6 МПа×с 5,7. Плотность 37% фосфорной кислоты (P2O5), кг/м3 1333,4. Насосы в составе агрегатов относятся к изделиям (восстанавливаемым) общего назначения «ИОН» Вид 1 по ГОСТ 27.003-90. Передаточная функция насосной установки: где Q- расход рабочей среды; U- напряжение питания. Подставляем известные коэффициенты, получаем передаточную функцию ГЦН: 4.4 Выбор усилителя и расчет передаточной функции В качестве усилителя выберем ПБР-3А - пускатель бесконтактный реверсивный. ПБР, предназначен для бесконтактного управления электрическими исполнительными механизмами, в приводе которых использованы трехфазные электродвигатели. Пускатель ПБР-3 обеспечивает плавный пуск, динамическое торможение и реверс трехфазного синхронного электродвигателя. Входным сигналом пускателей является напряжение. Пускатель рассчитан на подключение электродвигателей различной мощности.  Рисунок 15 – Пускатель бесконтактный реверсивный ПБР-3А Технические характеристики пускателя бесконтактного реверсивного ПБР-3А: Входной сигнал, В 36. Напряжение питания на выходе, В 380. Входное сопротивление, Ом 750. Максимальный коммутируемый ток, А 3. Потребляемая мощность, Вт не более 5. Быстродействие, мс 25. Частота тока, Гц 50. Разница между длительностями входного и выходного сигналов не более, мкс 20. Передаточная функция пускателя: WУ(p)=k, где k  WУ(p)=10,5. (15) 4.5 Электропривод МЭП-25000/60-30-00К и расчет передаточной функции Выбор электрического привода в качестве прямоходного механизма не случаен, поскольку он достаточно устойчив и точен. Его можно привести в действие посредством контроллера процесса. Механизм МЭП-25000/60-30-00К с трехфазным двигателем переменного тока АИР56В4 предназначен для привода запорно-регулирующей арматуры (запорных, запорно-регулирующих, регулирующих клапанов) в системах автоматического регулирования технологическими процессами в соответствии с командными сигналами, поступающими от регулирующих и управляющих устройств. Устанавливается непосредственно на трубопровод арматуры, и соединяется со штоком регулирующего органа посредством резьбовой муфты. Степень защиты IP 65 по ГОСТ 14254-96 обеспечивает работу при наличии в окружающей среде пыли и водяных струй. Устойчивы и прочны к воздействию синусоидальных вибраций по группе исполнения VI ГОСТ 12997-84. Технические характеристики электропривода МЭП-25000/60-30-00К: Номинальная мощность, Вт 180. Напряжение питания, В 380. Номинальное усилие на штоке, N 25000. Номинальное время полного хода штока, сек 60. Номинальный полный ход штока, мм 30. Мощность электропривода, Вт 250. Частота вращения выходного вала, об/мин 48. Сопротивление обмотки возбуждения, Ом 262. Технические характеристики двигателя АИР56В4: Ток статора, А 0,83. КПД, % 64. Коэффициент мощности, cosj 0,68. Номинальный крутящий момент, Н×м 50. Момент инерции, кг×м2 0,00079. Mпуск/ Mном 2.3. Iпуск./Iном 5. Синхронная частота вращения, об/мин 1500. Расчет передаточной функции электропривода: На входе электропривода имеем дифференциальное звено оценивающее разность между напряжением и ЭДС двигателя. На выходе должен быть сигнал перемещения, который сможем подать на клапан, поэтому включаем безынерционное звено. Передаточная функция электропривода с асинхронным трехфазным двигателем запишется в следующем виде где Рассчитаем электромеханическую постоянную  , ,где Решая уравнение относительно  Решение этого уравнения дает Найдем численное значение  Найдем значение момента двигателя  Жесткость механической характеристики β0 гдеω – скорость холостого хода; Определим электромеханическую постоянную времени где Рассчитаем электромеханическую постоянную где Передаточная функция электропривода Выбор регулирующего клапана и расчет передаточной функции Зависимость пропускной способности от хода затвора регулирующего клапана (плунжера) при постоянном перепаде давлений на клапане определяет собой характеристику регулирующего клапана. При линейной пропускной характеристике обеспечивается пропорциональная зависимость между пропускной способности клапана и ходом плунжера. Чем больше ход клапана, тем больше увеличивается ход. Регулирующие клапаны чаще всего изготавливают с пневматическими мембранными исполнительными механизмами (МИМ), сильфонными исполнительными механизмами (СИМ) или электрическими исполнительными механизмами (ЭИМ). Плунжер по конструктивному исполнению может быть стержневым, полым, сегментным, тарельчатым и поршневым (клеточным). В нашем техническом процессе используем клеточно-плунжерный регулирующе-отсечной электроклапан КМРО.Э с линейной пропускной способностью и приводом МЭП (механизм электромагнитный прямоходный), так как от удовлетворяет требованиям системы.  Рисунок 16 – Регулирующий клапан КМР.Э КМРО.Э могут не только регулировать, но и быстро открывать и закрывать трубопровод с герметичностью, соответствующей отсечному клапану. Быстрое открытие или закрытие клапана обеспечивается за счет электромагнитного клапана.  Рисунок 17 – Пропускная способность регулирующего клапана КМР.Э Технические характеристики регулирующего клапана КМР.Э: Пропускная способность линейная. Диаметр Dy, мм 150. Условное давление аммиака, кг/м3 0,77. Пропускная способность Kvy, м3/ч 50. Выходной сигнал клапана - расход Q: - изменяется в переделах от, м 3/ч 0 ÷ 19. Входной сигнал – открытие плунжера - изменяется в переделах от, % 0 ÷ 100. Класс герметичности регулирующе-отсечных клапанов в стандартном варианте «В» Расчет передаточной функции регулирующего клапана. Регулирующий клапан изменяет расход газа Gг при перемещении плунжера h. При мгновенном изменении h расход газа также меняется мгновенно. Поэтому клапаны являются обычными усилительными звеньями, в которых входная и выходная величины связаны коэффициентом передачи kКЛ.  , ,где  (17) (17)4.6 Выбор датчика расхода фосфорной кислоты и расчет передаточной функции Расходомер-счетчик электромагнитный РСЦ - 2 предназначен для непрерывного измерения расхода и объема, протекающих по трубопроводу агрессивных кислот, жидкостей с удельной проводимостью не менее 200 мкС/м, для применения в технологических целях в системах автоматического регулирования.  Рисунок 18 – Расходомер-счетчик электромагнитный РСЦ - 2 Технические характеристики расходомера РСЦ - 2: Рабочее давление, Рраб., МПа: 1333,4. Диапазон t0 измеряемой жидкости, 0С: от 0 до плюс 150. Диаметр трубопровода Ду, мм: 150. Предел измерений, мА от 0 до 5. Предел измерения, м3/ч от 0 до 180. Входной сигнал датчика расхода жидкости - расход Q: - изменяется в переделах от, м 3/ч 0 ÷ 30. Выходной сигнал – ток: - изменяется в приделах, мА 0 ÷ 5. Вывод передаточной функции: где k - коэффициент преобразования. k=5×10-3/30 =0,16(6) ×10-3 (А×ч/м3) T – время запаздывания. T=0,2(с) Отсюда передаточная функция: 4.7 Выбор преобразователя расхода аммиака и расчет передаточной функции САПФИР-22ДД-2440 предназначен для преобразования в унифицированный токовый сигнал разности расхода газа (аммиака). Основные технические характеристики САПФИР-22ДД-2440: Верхние пределы измерения, МПА 0,63. Пределы допускаемого рабочего избыточного давления, кгс/см2 10. Выходные сигналы, мА от 0 до 5. Пределы допускаемой основной погрешности, % 0,5. Входной сигнал датчика расхода газа - расход Q: - изменяется в переделах ∆Q, м3/ч 0 ÷ 19. Выходной сигнал – ток: - изменяется в приделах, мА 0 ÷ 5. Вывод передаточной функции: Зависимость между выходным и измеряемым параметром определяется выражением: где Зависимость между расходом Q и перепадом давления ΔP на диафрагме описывается выражением: где d – диаметр диафрагмы, м; ρ – плотность рабочей среды (для аммиака ρ=7710), кг/м3. Для диафрагмы диафрагмы камерной ДКС-6-200 условный проход составляет Ду 200 мм, внутренний диаметр составляет d=0,05 м. Таким образом при измеряемом расходе Q=19м3/ч=40,69кг/с перепад давления рассчитывается следующим образом Построим по данному выражению характеристику  I(Q) Q   Рисунок 19– Характеристика преобразователя расхода в рабочем диапазоне Или в системе СИ Таким образом, передаточную функцию датчика расхода можно представить в виде усилительного звена с рассчитанным выше коэффициентом пропорциональности. 4.8 Выбор датчика рН пульпы и расчет передаточной функции pH-метр — прибор для измерения концентрации ионов водорода (pH) в растворах и сырье, объектах окружающей среды и производственных систем непрерывного контроля технологических процессов. Промышленный двухканальный рН-метр рН-4122 предназначен для автоматического измерения активности ионов водорода.  Рисунок 19 – Промышленный двухканальный рН-метр рН-4122 Прибор представляет собой двухканальное средство измерений и состоит из двух первичных преобразователей (ПП) рН-41211 и двухканального измерительного прибора (ИП).рН-4122 обеспечивает цифровую индикацию значений рН, преобразование их в пропорциональные значения унифицированных выходных сигналов постоянного тока, обмен данными по цифровому интерфейсу RS485, сигнализацию о выходе измеряемых параметров за пределы заданных значений. Технические характеристики рН-метра рН-4122: Время запаздывания, сек 60. Количество измерительных каналов 2. Диапазон измерений рН, ед. pH от 0 до 14. Диапазон измерений ЭДС, мВ от минус 750 до плюс 750. Температура анализируемой среды, ºС от 0 до плюс 100. Предел допускаемого значения основной абсолютной погрешности: - при измерении рН в комплекте с ЗС плюс минус 0,05. - при измерении температуры плюс минус 0,5. Тип индикатора жидкокристаллический графический. Параметры сетевого питания, В, Гц 50. Потребляемая мощность, Вт не более 15. Входной сигнал рН-метра - ед. рН: - изменяется в переделах, ед.рН 4 ÷ 5. Выходной сигнал – ток: - изменяется в приделах, мА 0 ÷ 5. Передаточная функция: где T – постоянная времени; k – коэффициент преобразования. 4.9 Выбор скоростного аммонизатора-испарителя и расчет передаточной функции САИ представляет собой «участок смешения» и «перемешивания» представленный на рисунке.   Me1- расход первого потока; Me2 – расход второго потока; Ma – поток полученный результате смешения Рисунок 20 - Параметрическая схема двухкомпонентной системы Технические характеристики САИ: pH пульпы 4 ÷ 5. Расход аммиака, кг/с 40,96. Расход кислоты в САИ, кг/с 11,2. Масса пульпы, кг, 10,1. Диаметр САИ, мм 4020. Высота, мм 9700. Диаметр контура, мм 920. Диаметр корпуса Dр , мм 200. Диаметр патрубка ввода кислоты dк, мм 100. Диаметр патрубка ввода аммиака dам, мм 125. Диаметр сопла аммиака dсам, мм 100. Диаметр сопла пульпы (на конце транспортной трубы) dп, мм 125. Работа аммонизатора-испарителя основана на циркуляции потока кислоты и взаимодействии его с газообразным аммиаком и достаточно точно описываются дифференциальными уравнениями 1-го порядка с запаздыванием. С учетом этого запаздывания, величина рН на выходе из аппарата связана с расходом аммиака и кислоты (F,кг/с) Таким образом, передаточная функция будет иметь вид где G1– суммарный расход реагентов; k – коэффициент преобразования; 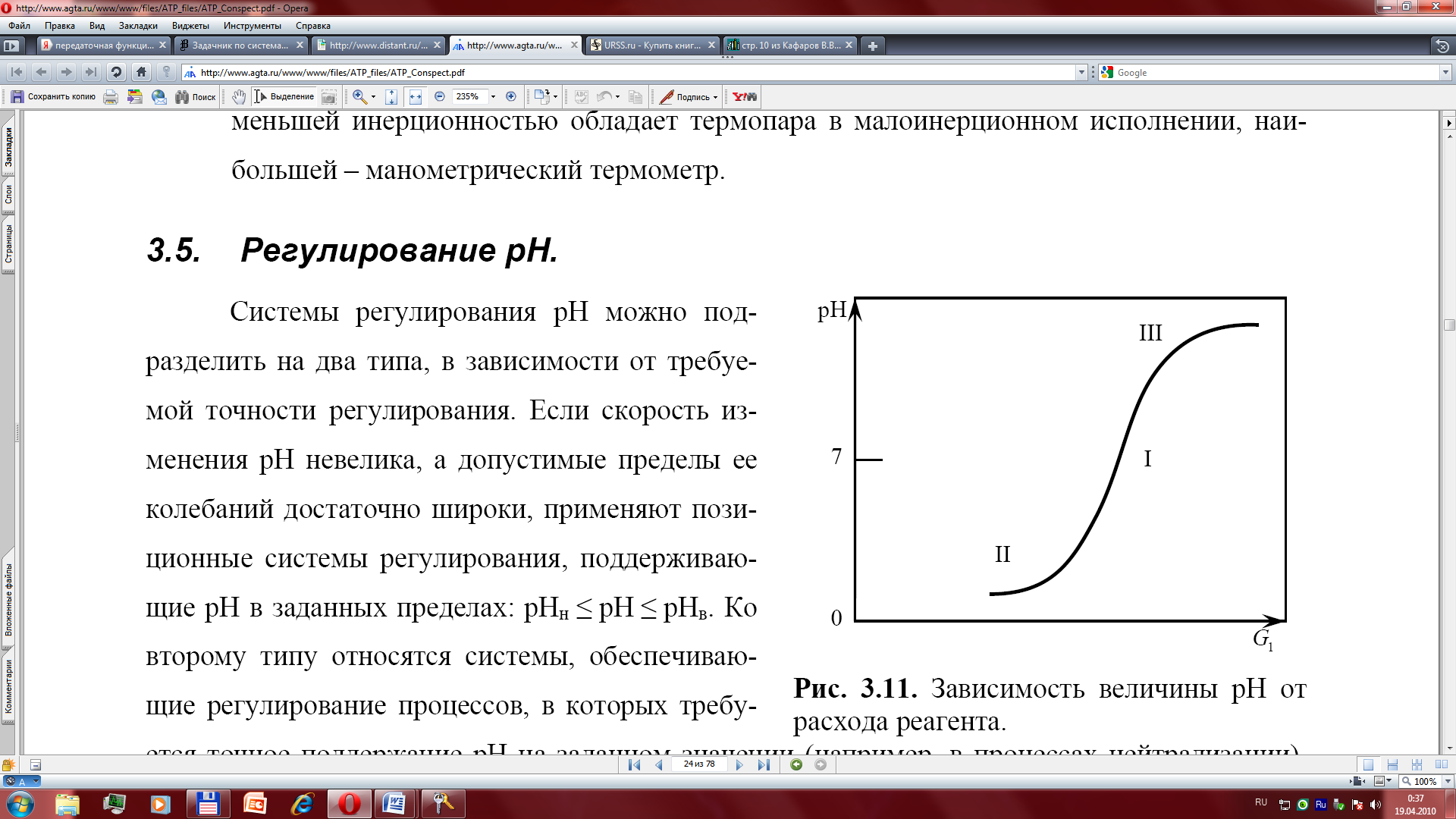 Рисунок 21 - Зависимость величины pH от суммарного расхода реагента  где m – масса полученной пульпы, кг; Подставив Т и k в передаточную функцию получим: 5 РАСЧЁТ УСТОЙЧИВОСТИ СИСТЕМЫ 5.1 Расчёт передаточной функции системы автоматического регулирования Для расчетов передаточных функций и построения характеристик системы воспользуемся программой MATLAB и MathCad. Структурная схема на основе передаточных функций полученных ранее. 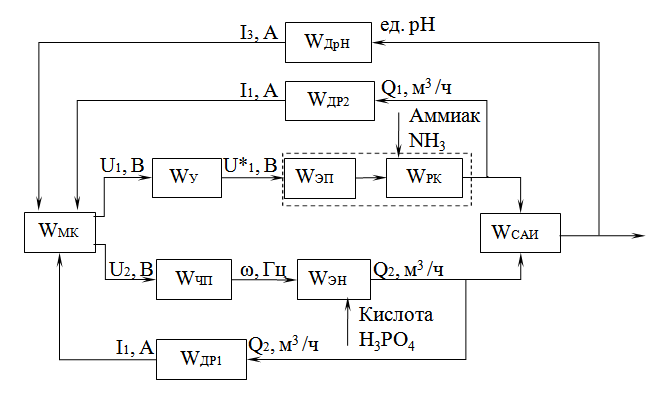 Рисунок 21 – Функциональная схема Передаточная функция замкнутой и разомкнутой системы имеет вид   Определим передаточную функцию замкнутой и разомкнутой системы Так как в данной системе установлен цифровой микропроцессор, который осуществляет вычисление сигнала и посылает управляющие сигналы на устройства системы, то расчет следует провести для дискретной системы. При этом необходимо задать период дискретизации (интервал опроса датчиков) системы. Чем меньше период дискретизации Т0, тем более дискретная система приближается по своим свойствам к непрерывной. Однако при слишком малых значениях Т0процессор в реальной системе может не успевать выполнять все необходимые вычисления. Кроме того, при уменьшении Т0 увеличивается число шагов переходного процесса. В силу сказанного, Т0 не должно быть слишком мало. Выберем период дискретизации равный постоянной времени ph-метра и деленным на 10. Т/10=6 с (опрос датчиков происходит примерно 6 раз в минуту). 5.2 Проверка устойчивости дискретной системы по частотному критерию Частотный критерий устойчивости импульсных систем аналогичен критерию устойчивости Найквиста для непрерывных систем, и формулируется следующим образом: если разомкнутая импульсная система устойчива, то замкнутая импульсная система регулирования устойчива, если амплитудно-фазовая частотная характеристика (АФЧХ) разомкнутой системы не охватывает точку (-1; j0). Проверим предварительно на устойчивость по критерию Ляпунова разомкнутую систему вида Для этого найдем корни характеристического уравнения. p1=-3,92; p2=-0,59. Поскольку все корни отрицательны и являются «левыми», то разомкнутая система устойчива. Оценим устойчивость системы по критерию Найквиста. Заменим в передаточной функции разомкнутой системы р на jω. Построим АФЧХ разомкнутой системы предварительно выделив мнимую и действительную части.    Рисунок 22 - АФЧХ разомкнутой дискретной системы Так как АФЧХ разомкнутой системы, построенная на рисунке, не охватывает точку (-1; j0), то замкнутая импульсная система регулирования устойчива. 5.3 Построение логарифмических частотных характеристик системы и их анализ Линейные типовые звенья можно разделить на два типа – непрерывные и дискретные. Частотные характеристики линейных непрерывных типовых звеньев находятся из передаточных функций после подстановки в них p = jω и выделения действительной и мнимой частей W0 (jω) = U0 (ω) + jV0 (ω), (23) где U0 (ω) и V0 (ω) – соответственно действительная и мнимая частотные характеристики. Пользуясь выражением (23), в декартовой системе координат построим амплитудно-фазовые частотные характеристики W0 (jω). Если перейти к полярной системе координат, то выражение (23) можно переписать в виде W0(jω) = H(ω) e jφ(ω), (24) где H (ω) и φ(ω) – соответственно амплитудная и фазовая частотные характеристики. Формулы для вычисления амплитудной и фазовой частотных характеристик:  (26) (26)Частотные характеристики линейных дискретных типовых звеньев находятся путем приведения к комплексной переменной jω которая связана с переменнымиλ и z следующими соотношениями Логарифмические частотные характеристики представляют собой амплитудную и фазовую частотные характеристики САР, построенные в полулогарифмическом масштабе. Логарифмической амплитудной частотной характеристикой (ЛАЧХ) системы называется кривая, соответствующая 20 десятичным логарифмам модуля частотной характеристики (АЧХ), построенная в десятичном логарифмическом масштабе частот: где Тогда для построения ЛАЧХ можно использовать передаточную функцию непрерывной разомкнутой системы. Данное выражение представляет собой произведение коэффициента усиления и передаточных функций элементарных динамических звеньев. Известно, что псевдочастота практически совпадает с круговой частотой в области, где выполняется условие: T0<2Tmin, (30) где Tmin – минимальная постоянная времени элементов разомкнутой системы. Так как минимальная постоянная времени, соответствующая датчика положения равна 8 с., выбранный период дискретизации – 6, то неравенство выполняется всегда (6<2.8) и во всей области работы системы можно положить    Рисунок 24 - ЛАЧХ разомкнутой системы    Рисунок 25 - ЛФЧХ разомкнутой системы По построенным характеристикам определим запасы по фазе и амплитуде. Запас по амплитуде определяется следующим образом. Находится частота при которой ЛФЧХ первый раз пересекает прямую со значением -1800, в этой частоте проводится вертикальная прямая до пересечения с ЛАЧХ. Расстояние от этой точки пересечения до оси составляет запас устойчивости по амплитуде в децибелах. В нашем случае запас по амплитуде 50 дб/дек. Запас устойчивости по фазе определяется следующим образом. Определяется частота при которой ЛАЧХ пересекает ось (0 децибел). При этой частоте проводится вертикальная прямая вниз до пересечения с ЛФЧХ. Расстояние от точки пересечения до прямой -1800 составит запас по фазе в градусах. В нашем случае ЛАЧХ пересекает ось 0, следовательно, запас по фазе составляет 20,75°. Так как время переходного процесса не соответствует требуемому, то системе требуется коррекция. 5.4 Анализ качества системы 5.3.1 Прямые оценки качества. Для наглядного отображения свойств рассматриваемой системы построим переходный процесс, воспользовавшись обратным преобразованием Лапласа от передаточной функции замкнутой системы. По графику переходного процесса (рисунок 24) определим прямые показатели качества системы: а) Время регулирования (время переходного процесса) - время, за которое система приходит к установившемуся значению с некоторой долей погрешности. Обычно она составляет 5% (пятипроцентная трубка). Приблизительно время регулирования составляет 186,3 (с). tp = 186,3с Время первого согласования t1=325. б) Перерегулирование отражает в процентах максимальное отклонение от установившегося значения. Максимальное значение отсутствует, тогда перерегулирование:   Рисунок 26– Переходный процесс нескорректированной системы По характеру переходного процесса можно судить об устойчивости системы: характеристика устойчивая монотонно возрастающая. 5.3.2 Косвенные оценки качества. Косвенные оценки качества проводятся по частотным характеристикам. Наиболее часто используется амплитудно-частотная характеристика. (АЧХ) замкнутой системы. Амплитудно-частотная функция определяется по формуле: График АЧХ замкнутой системы приведен на рисунке 25. Косвенные оценки качества: - показатель колебательности, определяемый по формуле где Amax – максимум АЧХ; A(0) – значение амплитуды при нулевой частоте. A(0)=0,99 рад/с Amax=20,6 В данном случае M=21 – переходный процесс протекает с колебаниями по апериодическому закону.  Рисунок 27 – АЧХ системы - Частота среза – частота, при которой АЧХ достигает значения, равного 1. Частота среза косвенно характеризует быстродействие системы: чем больше часта среза, тем меньше время регулирования. λср= 1,8 рад/с - Резонансная частота – частота, в которой амплитудно-частотная функция достигает своего максимального значения: λр=0,46 рад/с - Полоса пропускания – интервал частот, в котором амплитуда АЧХ превышает уровень 0.707 Amax 0.245<ω<0.644 5.5 Построение желаемой ЛАЧХ. Желаемой называют асимптотическую ЛАЧХ разомкнутой системы, имеющей желаемые (требуемые) статические и динамические свойства. Желаемая ЛАЧХ строится на основании требований к системе, отраженных в техническом задании, при этом рекомендуется, чтобы характеристика не скорректированной системы и желаемая характеристика скорректированной системы совпадали друг с другом в возможно более широком диапазоне частот. В противном случае реализация корректирующих устройств резко усложняется. Построим желаемую ЛАЧХ исследуемой системы, используюя метод запретной области. Рассмотрим низкочастотную часть желаемой ЛАЧХ системы. Отметим в низкочастотной области желаемой ЛАЧХ запретную зону для обеспечения требований по ошибке при заданных скорости и ускорении входного сигнала. Запишем некоторые данные из технического задания для нашей системы: Максимально допустимая ошибка Максимальна скорость изменения pH пульпы Максимальное ускорение   Расчет ординаты рабочей точки.  (34) (34)Вычислим амплитуду контрольной точки: Подставим числовые значения в выражения Таким образом, можно сформулировать требования к низкочастотной части желаемой ЛАЧХ системы: для того что бы входное гармоническое воздействие с ошибкой, не превышающей доп, ЛАЧХ системы должна проходить не ниже контрольной точки Ак (0,05;39,3), то есть строим запретную область. Через данную точку проводим прямую с наклоном – 20 дБ/дек с целью формирования запретной зоны, полуплоскость, находящаяся под этой прямой является запретной зоной. Построение среднечастотной асимптоты ЖЛАЧХ начинают с выбора частоты среза. По номограмме Солодовникова (рисунок 28) и желаемому перерегулированию 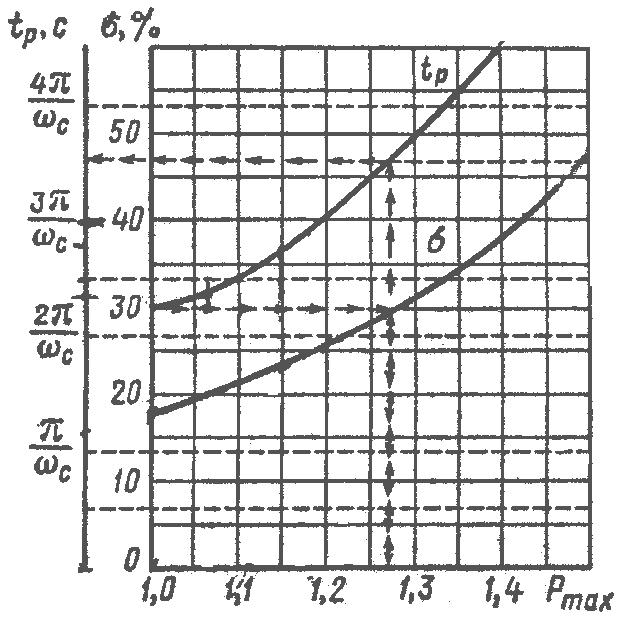 Рисунок 28 – Номограмма Солодовникова M=1.27 Среднечастотная асимптота ЖЛАЧХ проводится через точку cр с наклоном –20 дб/дек, который обеспечивает необходимый запас по фазе. Протяженность h среднечастотной асимптоты устанавливается исходя из необходимого запаса устойчивости. Из этих же соображений выбирается ее сопряжение с низкочастотной асимптотой. Показатель колебательности h характеризует склонность системы к колебаниям. Чем больше М, тем меньше запас устойчивости системы. Границы среднечастотной асимптоты Используя полученные данные, строим желаемую характеристику, обеспечивающую необходимые показатели качества системы. Через частоту среза проводится среднечастотная асимптота с наклоном –20 дб/дек, высокочастотная часть системы мало влияет на устойчивость, поэтому ее достроим эквидистантно к высокочастотной части ЛАЧХ неизменяемой части системы. 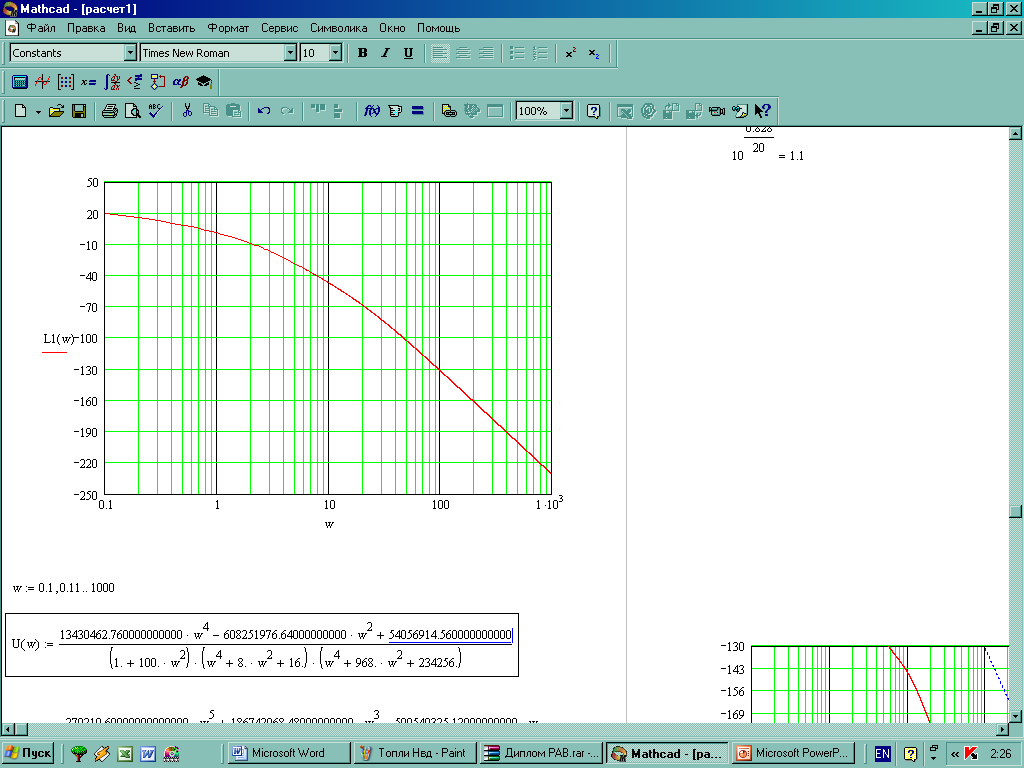 Рисунок 29 - Желаемая ЛАЧХ      5.6 Определение запасов устойчивости. По полученной передаточной функции определяется логарифмическая фазовая характеристика (ЛФЧХ) скорректированной системы. Рисунок 30 - Желаемая ЛФЧХ Определение запасов устойчивости производится следующим образом: в точке пересечения графика ЛФЧХ с осью 180 восстанавливается перпендикуляр до пересечения с осью абсцисс. От оси абсцисс до желаемой ЛАЧХ определяется запас устойчивости по амплитуде, в нашем случае он равен 70дБ. Запас по фазе определяется по прямой, проходящей через частоту среза от оси 180 до графика ЛФЧХ. Он равен = 170, что удовлетворяет техническому заданию. Синтез корректирующих звеньев. Коррекция динамических свойств САУ осуществляется для выполнения требований по точности, устойчивости и качеству переходных процессов. С точки зрения требований к точности коррекция может потребоваться для увеличения порядка астатизма или коэффициента передачи системы при сохранении устойчивости и определенного качества переходного процесса. Коррекция применяется также как средство обеспечения устойчивости, а так же повышения качества переходного процесса. Осуществляется коррекция введением в систему корректирующих звеньев с особо подобранной передаточной функцией. Принципиально корректирующие звенья могут включаться либо последовательно с основными звеньями САУ, либо параллельно им, также существуют и комбинированные способы включения. Соответственно, по способу включения в систему корректирующие звенья делятся на последовательные и параллельные. При включении в систему последовательного КУ передаточная функция разомкнутой скорректированной системы принимает вид где Wк(p) – передаточная функция корректирующего устройства Подставляя в выражение значения передаточной функции неизменяемой части системы и передаточной функции желаемой характеристики получим: На рисунке 8 представлена схема и логарифмическая характеристика корректирующего устройства.  Рисунок 31 – Корректирующее устройство Передаточная функция выглядит следующим образом   Зададимся значением: R1=1000 (Ом), тогда  Так как для коррекции необходим наклон +40 дб/дек, то необходимо последовательное включение данной схемы два раза. Кроме того, необходимо учесть подъем корректирующей ЛАЧХ вверх на 80 дб, что осуществляется вводом усилителя с коэффициентом усиления 104, который может быть реализован на операционном усилителе. То есть окончательно схему корректирующего последовательного устройства можно представить в виде (рисунок 32).  Рисунок 32 – Последовательное корректирующее устройство Последовательные корректирующие звенья наиболее удобны в электрических САУ, особенно постоянного тока. В этом случае последовательные корректирующие звенья осуществляются в виде пассивных четырехполюсников, передаточные функции которых можно просто и плавно изменять в очень широких пределах, ограниченных лишь достаточно свободными условиями физической реализуемости. К достоинствам последовательной коррекции можно отнести: - ускорение переходного процесса; - снижение установившейся ошибки; - простота включения элементов коррекции; К недостаткам можно отнести: - увеличение чувствительности к помехам; - необходимость согласования сопротивления корректирующих элементов с входным и выходным сопротивлением элементов системы, к которым они подключаются; - снижение величины основного сигнала – увеличение ошибки. Анализ устойчивости скорректированной системы. Устойчивость скорректированной системы определим по переходному процессу. Как известно неустойчивые системы имеют расходящейся переходный процесс, устойчивые – затухающий. Одним из способов построения переходного процесса является представление передаточной функции замкнутой системы в виде функции, полученной путем обратного преобразования Лапласа. Передаточная функция замкнутой системы где W(p)п – передаточная функция прямой цепи; W(p)р – передаточная функция разомкнутой системы. С учетом корректора запишется в виде где W(p)k – передаточная функция корректора Передаточные функции прямой цепи и разомкнутой системы | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||