|
|
ШПОРЫ по электре. 1 Реальные и идеальные источники эл энергии. Схемы замещения
Любая электрическая машина обладает свойством обратимости, т.е. может работать в режиме генератора или двигателя. Если к зажимам приведенного во вращение якоря генератора присоединить сопротивление нагрузки, то под действием ЭДС якорной обмотки в цепи возникает ток
где U - напряжение на зажимах генератора; Rя - сопротивление обмотки якоря.
(11.2)
Уравнение (11.2) называется основным уравнением генератора. С появлением тока в проводниках обмотки возникнут электромагнитные силы. На рис. 11.5 схематично изображен генератор постоянного тока, показаны направления токов в проводниках якорной обмотки.
Рис. 11.5
Воспользовавшись правилом левой руки,
видим, что электромагнитные силы создают электромагнитный момент Мэм, препятствующий вращению якоря генератора.
Чтобы машина работала в качестве генератора, необходимо первичным двигателем вращать ее якорь, преодолевая тормозной электромагнитный момент.
44 Все рабочие характеристики двигателя постоянного тока, как и генератора, зависят от способа включения цепи возбуждения по отношению к цепи якоря. Соединение этих цепей может быть параллельным, последовательным, смешанным и, наконец, они могут быть независимы друг от друга. Двигатель с независимым возбуждением.
Если обмотку возбуждения подключить к другому источнику постоянного напряжения, то получим двигатель с независимым возбуждением. Такими же свойствами обладают электродвигатели с постоянным магнитом. Скоростная характеристика двигателей с независимым и параллельным возбуждением – это зависимость n = f ( Iя ) при U = const и Iе = const, где n - скорость
Iя - ток якоря
Iе - ток возбуждения.
Рис.8.5.4. Скоростная характеристика.
Изменение скорости вращения может происходить за счёт изменения нагрузки и магнитного потока. Увеличение тока нагрузки незначительно изменяет внутреннее падение напряжения из-за малого сопротивления цепи якоря и поэтому лишь незначительно уменьшает скорость вращения двигателя. Что же касается магнитного потока, то вследствие реакции якоря при увеличении тока нагрузки он несколько уменьшается, что приводит к незначительному увеличению скорости двигателя. Таким образом, скорость вращения двигателя с параллельным возбуждением изменяется очень мало. Скорость вращения двигателя определяется формулой: n = (U – IяRя) / c∙Φ, где c – коэффициент, зависящий от устройства машины. Скорость вращения двигателя с независимым возбуждением можно регулировать либо изменением сопротивления в цепи якоря, либо изменением магнитного потока. Следует отметить, что чрезмерное уменьшение тока возбуждения и, особенно, случайный обрыв этой цепи очень опасны для двигателей с параллельным и независимым возбуждением, т.к. ток в якоре может возрасти до недопустимо больших значений. При небольшой нагрузке (или на холостом ходу) скорость может настолько возрасти, что станет опасной для целостности двигателя.
45Все рабочие характеристики двигателя постоянного тока, как и генератора, зависят от способа включения цепи возбуждения по отношению к цепи якоря. Соединение этих цепей может быть параллельным, последовательным, смешанным и, наконец, они могут быть независимы друг от друга Машина постоянного тока может работать в двух режимах: двигательном и генераторном, в зависимости от того, какую энергию к ней подвести — если электрическую, то электрическая машина будет работать в режиме электродвигателя, а если механическую — то будет работать в режиме генератора. Однако электрические машины, как правило, предназначены заводом изготовителем для одного определенного режима работы — или в режиме генератора, или электродвигателя. Электродвигатель. Электродвигатели постоянного тока стоят почти на каждом автомобиле — это стартер, электропривод стеклоочистителя, вентилятор отопителя салона и др. В роли индуктора выступает статор, на котором расположена обмотка. На неё подаётся постоянный ток, в результате чего вокруг неё создаётся постоянное магнитное поле. Обмотка ротора состоит из проводников, запитанных через коллектор. В результате на них действуют пары сил Ампера, которые вызывают вращающий момент. Направление сил определяется по правилу «буравчика». Однако этот вращающий момент способен повернуть ротор только на 180 градусов, после чего он остановится. Чтобы это предотвратить, используется щёточно-коллекторный узел, выполняющий роль переключателя полюсов и датчика положения ротора (ДПР). Машина постоянного тока может работать в двух режимах: двигательном и генераторном, в зависимости от того, какую энергию к ней подвести — если электрическую, то электрическая машина будет работать в режиме электродвигателя, а если механическую — то будет работать в режиме генератора. Однако электрические машины, как правило, предназначены заводом изготовителем для одного определенного режима работы — или в режиме генератора, или электродвигателя. Электродвигатель. Электродвигатели постоянного тока стоят почти на каждом автомобиле — это стартер, электропривод стеклоочистителя, вентилятор отопителя салона и др. В роли индуктора выступает статор, на котором расположена обмотка. На неё подаётся постоянный ток, в результате чего вокруг неё создаётся постоянное магнитное поле. Обмотка ротора состоит из проводников, запитанных через коллектор. В результате на них действуют пары сил Ампера, которые вызывают вращающий момент. Направление сил определяется по правилу «буравчика». Однако этот вращающий момент способен повернуть ротор только на 180 градусов, после чего он остановится. Чтобы это предотвратить, используется щёточно-коллекторный узел, выполняющий роль переключателя полюсов и датчика положения ротора (ДПР).
46. Вращающий момент двигателя постоянного тока
Вращающий момент двигателя постоянного тока создается взаимодействием магнитного потока индуктора Ф с током якоряIя. При числе параллельных ветвей обмотки якоря 2а сила тока в каждой из них будет равна По формуле  вращающий момент, создаваемый каждым стержнем обмотки вращающий момент, создаваемый каждым стержнем обмотки
где D – диаметр якоря и l – активная длина стержня в м. Полный электромагнитный вращающий момент двигателя в ньютонометрах получим, помножив т на число стержней, в обмотке N:
Обозначив полюсное деление через τ, можем написать:
и окончательно
где постоянный коэффициент 
Вращающий момент двигателя постоянного тока пропорционален произведению магнитного потока индуктора на ток якоря.
Механическая мощность на валу двигателя, согласно равенству  , выразится формулой , выразится формулой

47 Основной характеристикой для оценки электромеханических свойств электродвигателя является механическая характеристика, представляющая собой зависимость n=f(М) или  = f(М). Иногда используется так называемая скоростная характеристика, представляющая собой зависимость n=f(I). или= f(I). = f(М). Иногда используется так называемая скоростная характеристика, представляющая собой зависимость n=f(I). или= f(I). 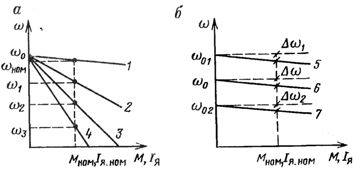
Рис. 2. Механические характеристики двигателя постоянного тока при различных сопротивлениях цепи якоря (а) и напряжениях (б)
Изменяя сопротивление реостата в цепи якоря можно получить при номинальной нагрузке различные угловые скорости электродвигателя на искусственных характеристиках — ω1, ω2, ω3
48 Пуск двигателей постоянного тока
Двигатели постоянного тока пускаются в ход с помощью пускового реостата, ограничивающего пусковой ток. Из уравнения электрического равновесия 
Так как в момент пуска n = 0, то E = с Ф n = 0 и, следовательно
Сопротивление якоря Rя очень мало (десятые, а то и сотые доли ома) и потому пусковой ток якоря Iяn получается очень большим, во много раз превышающим номинальный. Чтобы ограничить пусковой ток, на время пуска последовательно с якорем включается пусковой реостат Rn.
В этом случае
Величина сопротивления Rn выбирается по допустимому пусковому току якоря, обычно
По мере разгона двигателя пусковой реостат ступень за ступенью выводится. Металлические проволочные пусковые реостаты входят в комплект поставки двигателя. При пуске двигателя параллельная обмотка возбуждения включается на полное напряжение, то есть регулировочный реостат Rpeг в цепи параллельной обмотки выводится полностью, пуск осуществляется при максимальном потоке Ф, что увеличивает пусковой момент и облегчает запуск. Реверсирование — изменение направления вращения двигателя — производится путем изменения направления действия вращающего момента. Для этого требуется изменить направление магнитного потока двигателя постоянного тока, т. е. переключить обмотку возбуждения или якорь, при этом в якоре будет протекать ток другого направления. При переключении и цепи возбуждения, и якоря направление вращения останется прежним.
49 Регулирование скорости вращения двигателей
Из уравнения , с учетом выражения  , находим выражение для числа оборотов , находим выражение для числа оборотов
Как показывает это выражение, регулировать n можно двумя способами: изменяя поток Ф или напряжение, подведенное к двигателю U. Регулирование скорости изменением потока осуществляется с помощью регулировочного реостата Rpeг в цепи возбуждения двигателя (в цепи индуктора). Перемещение движка реостата Rpeг приводит к изменению тока возбуждения iв, а значит, и потока Ф. Регулирование скорости двигателя последовательного возбуждения изменением потока осуществляется с помощью регулировочного реостата Rpeг, шунтирующего последовательную обмотку возбуждения. С уменьшением сопротивления шунтирующего реостата Rpeг ток возбуждения iв, а следовательно, и поток Ф уменьшаются, а обороты увеличиваются. Второй способ регулирования скорости применяется обычно тогда, когда параллельно работают два (или более) двигателя, как например, в вагоне трамвая. В этом случае изменение напряжения на зажимах двигателей (при неизменном напряжении сети) достигается в основном изменением схемы взаимного соединения двигателей и частично реостатом в цепи якоря. А якоря двигателей соединены последовательно между собой, последовательно с ними включен пускорегулирующий реостатRpeг, выполняющий одновременно функции пускового и регулирующего реостатов. Напряжение на зажимах двигателей
Когда двигатели остаются соединенными последовательно, но реостат выведен; напряжение на зажимах каждого двигателя
Когда двигатели соединены параллельно, последовательно с ними включен реостат:

Все переключения выполняются с помощью аппарата, называемого контроллером. Возможность плавного, экономичного и в широких пределах регулирования скорости вращения является одним из основных достоинств двигателей постоянного тока.
50 Во всех исполнительных механизмах, где используется электрический привод, из соображений безопасности, как правило, применяют механический и электрический способы торможения.- Механическое торможение основано на трении тормозных устройств о вращающиеся части привода, а электрическое — на создании в двигателе тормозного электромагнитного момента М, противоположного направлению вращения. Существуют три вида электрического торможения: рекуперативное, динамическое (реостатное) и противовключением. Рекуперативное торможение. Оно является наиболее экономичным, так как основано на переводе двигателя в генераторный режим с отдачей энергии в сеть. Двигатели параллельного или смешанного возбуждения могут автоматически переходить в режим рекуперативного торможения при частоте вращения больше п0 = U\(сеФ); характеристики продолжатся левее оси ординат, где вращающий момент является отрицательным. В этом случае ЭДС машины становится больше напряжения сети и ток, согласно, меняет свое направление. Автоматический переход двигателя смешанного возбуждения в рекуперативный режим и его сравнительно «мягкие» механические характеристики обусловили его применение для целей электрической тяги на троллейбусах и трамваях. Можно перевести машину в рекуперативный режим и принудительно, уменьшив частоту вращения па путем увеличения тока возбуждения (значит, Ф) или снижения подводимого напряжения U. Двигатель последовательного возбуждения таким способом не может перейти в рекуперативный режим: его характеристика на рис. 7.4 не пересекает ось ординат, а ЭДС Е никогда не может стать больше напряжения U. Дело в том, что Е — сепФу а Ф = с<&1 я (ненасыщенная магнитная система) и, п 1 //„. Поэтому с ростом частоты вращения убывает ток якоря, а с ним и магнитный поток; следовательно, ЭДС Е не увеличивается. На электроподвижном составе двигатели последовательного возбуждения для перевода в рекуперативный режим изменением схемы включения превращают в генераторы независимого возбуждения. Динамическое торможение. Осуществляется путем отключения якорной обмотки от сети и замыканием ее на тормозной резистор (реостат) сопротивлением гт. При этом механическая энергия вращающихся масс преобразуется в электрическую, которая расходуется на нагрев тормозного резистора и других элементов цепи якоря. Обмотка возбуждения двигателя параллельного возбуждения остается включенной в сеть той же полярности и, следовательно, ток возбуждения и магнитный поток остаются неизменными. Так как якорная обмотка отключена от сети, то ток, потребляемый двигателем из сети, равен нулю, но якорь двигателя по инерции продолжает вращаться, вследствие чего в нем наводится ЭДС Е = сепФ. Тормозной ток якоря
 (1) (1)
Изменение знака тока приводит к изменению знака момента, который из вращающего становится тормозным:
 (2) (2)
Из выражения (2) видно, что при постоянном магнитном потоке Ф тормозной момент зависит от частоты вращения /г, которая вследствие торможения убывает, и от сопротивления тормозного резистора гт. Для поддержания тормозного момента относительно постоянным тормозной резистор выполняют секционированным. По мере уменьшения частоты вращения якоря выводят секции тормозного резистора, уменьшая его сопротивление, и тем самым поддерживают ток и тормозной момент постоянными. У двигателя последовательного возбуждения при динамическом торможении необходимо переключить выводы обмотки возбуждения с тем, чтобы направление тока в ней а значит, и магнитного потока осталось неизменным.
|
|
|
 Скачать 1.27 Mb.
Скачать 1.27 Mb.