1. Рулевое управление Назначение рулевого управления и схема поворота автомобиля
 Скачать 6.15 Mb. Скачать 6.15 Mb.
|

|
1. Рулевое управление Назначение рулевого управления и схема поворота автомобиля Рулевое управление служит для изменения направления движения автомобиля поворотом передних управляемых колес. Оно состоит из рулевого механизма и рулевого привода. На грузовых автомобилях большой грузоподъемности в рулевом управлении применяют усилитель, который облегчает управление автомобилем, уменьшает толчки на рулевое колесо и повышает безопасность движения.  Схема поворота автомобиля Рулевой механизм служит для увеличения и передачи на рулевой привод усилия, прилагаемого водителем к рулевому колесу. Рулевой механизм преобразует вращение рулевого колеса в поступательное перемещение тяг привода, вызывающее поворот управляемых колес. При этом усилие, передаваемое водителем, от рулевого колеса к поворачиваемым колесам, возрастает во много раз. Рулевой привод совместно с рулевым механизмом передает управляющее усилие от водителя непосредственно к колесам и обеспечивает этим поворот управляемых колес на задаваемый угол. Чтобы совершить поворот без бокового скольжения колес, все они должны катиться по дугам разной длины, описанным из центра поворота О см. рис. При этом передние управляемые колеса должны поворачиваться на разные углы. Внутреннее по отношению к центру поворота колесо должно поворачиваться на угол альфа-В, наружное - на меньший угол альфа-Н. Это обеспечивается соединением тяг и рычагов рулевого привода в форме трапеции. Основанием трапеции служит балка 1 переднего моста автомобиля, боковыми сторонами являются левый 4 и правый 2 поворотные рычаги, а вершину трапеции образует поперечная тяга 3, которая соединяется с рычагами шарнирно. К рычагам 4 и 2 жестко присоединены поворотные цапфы 5 колес. Один из поворотных рычагов, чаще всего левый рычаг 4, имеет связь с рулевым механизмом через продольную тягу 6. Таким образом, при приведении в действие рулевого механизма продольная тяга, перемещаясь вперед или назад, вызывает поворот обоих колес на разные углы в соответствии со схемой поворота. механизм управление рулевой автомобиль  Схемы рулевого управления Расположение и взаимодействие деталей рулевого управления, не имеющего усилителя, можно рассмотреть на схеме (см. рисунок). Здесь рулевой механизм состоит из рулевого колеса 3, рулевого вала 2 и рулевой передачи 1, образованной зацеплением червячной шестерни (червяка) с зубчатым стопором, на вал которого крепится сошка 9 рулевого привода. Сошка и все остальные детали рулевого управления: продольная тяга 8, верхний рычаг левой поворотной цапфы 7, нижние рычаги 5 левой и правой поворотных цапф, поперечная тяга 6 составляют рулевой привод. Поворот управляемых колес происходит при вращении рулевого колеса 3, которое через вал 2 передает вращение рулевой передаче 1. При этом червяк передачи, находящийся в зацеплении с сектором, начинает перемещать сектор вверх или вниз по своей нарезке. Вал сектора приходит во вращение и отклоняет сошку 9, которая своим верхним концом насажена на выступающую часть вала сектора. Отклонение сошки передается продольной тяге 8, которая перемещается вдоль своей оси. Продольная тяга 8 связана через верхний рычаг 7 с поворотной цапфой 4, поэтому ее перемещение вызывает поворот левой поворотной цапфы. От нее усилие поворота через нижние рычаги 5 и поперечную тягу 6 передается правой цапфе. Таким образом происходит поворот обоих колес. Управляемые колеса поворачиваются рулевым управлением на ограниченный угол, равный 28-35°. Ограничение вводится для того, чтобы исключить при повороте задевание колесами деталей подвески или кузова автомобиля. Конструкция рулевого управления очень сильно зависит от типа подвески управляемых колес. При зависимой подвеске передних колес в принципе сохраняется схема рулевого управления, приведенная на (рис. а), при независимой подвеске (рис. 6) рулевой привод несколько усложняется. 2. Основные типы рулевых механизмов и приводов Рулевой механизм Он обеспечивает поворот управляемых колес с небольшим усилием на рулевом колесе. Это может быть достигнуто за счет увеличения передаточного числа рулевого механизма. Однако передаточное число ограничено количеством оборотов рулевого колеса. Если выбрать передаточное число с количеством оборотов рулевого колеса больше 2-3, то существенно увеличивается время, требуемое на поворот автомобиля, а это недопустимо по условиям движения. Поэтому передаточное число в рулевых механизмах ограничивают в пределах 20-30, а для уменьшения усилия на рулевом колесе в рулевой механизм или привод встраивают усилитель. Ограничение передаточного числа рулевого механизма также связано со свойством обратимости, т. е. способностью передавать обратное вращение через механизм на рулевое колесо. При больших передаточных числах увеличивается трение в зацеплениях механизма, свойство обратимости пропадает и самовозврат управляемых колес после поворота в прямолинейное положение оказывается невозможным. Рулевые механизмы в зависимости от типа рулевой передачи разделяют на: червячные, винтовые, шестеренчатые. Рулевой механизм с передачей типа червяк - ролик имеет в качестве ведущего звена червяк, закрепленный на рулевом валу, а ролик установлен на роликовом подшипнике на одном валу с сошкой. Чтобы сделать полное зацепление при большом угле поворота червяка, нарезку червяка выполняют по дуге окружности - глобоиде. Такой червяк называют глобоидным. В винтовом механизме вращение винта, связанного с рулевым валом, передается гайке, которая заканчивается рейкой, зацепленной с зубчатым сектором, а сектор установлен на одном валу с сошкой. Такой рулевой механизм образован рулевой передачей типа винт-гайка-сектор. В шестеренчатых рулевых механизмах рулевая передача образуется цилиндрическими или коническими шестернями, к ним же относят передачу типа шестерня-рейка. В последних цилиндрическая шестерня связана с рулевым валом, а рейка, зацепленная с зубьями шестерни, выполняет роль поперечной тяги. Реечные передачи и передачи типа червяк-ролик преимущественно применяют на легковых автомобилях, так как обеспечивают сравнительно небольшое передаточное число. Для грузовых автомобилей используют рулевые передачи типа червяк-сектор и винт-гайка-сектор, снабженные либо встроенными в механизм усилителями, либо усилителями, вынесенными в рулевой привод. Рулевой привод Рулевой привод предназначен для передачи усилия от рулевого механизма на управляемые колеса, обеспечивая при этом их поворот на неодинаковые углы. Конструкции рулевого привода различаются расположением рычагов и тяг, составляющих рулевую трапецию, по отношению к передней оси. Если рулевая трапеция находится впереди передней оси, то такая конструкция рулевого привода называется передней рулевой трапецией, при заднем расположении - задней трапецией. Большое влияние на конструктивное исполнение и схему рулевой трапеции оказывает конструкция подвески передних колес. При зависимой подвеске рулевой привод имеет более простую конструкцию, так как состоит из минимума деталей. Поперечная рулевая тяга в этом случае сделана цельной, а сошка качается в плоскости, параллельной продольной оси автомобиля. Можно сделать привод и с сошкой, качающейся в плоскости, параллельной переднему мосту. Тогда продольная тяга будет отсутствовать, а усилие от сошки передается прямо на две поперечные тяги, связанные с цапфами колес. При независимой подвеске передних колес схема рулевого привода конструктивно сложнее. В этом случае появляются дополнительные детали привода, которых нет в схеме с зависимой подвеской колес. Изменяется конструкция поперечной рулевой тяги. Она сделана расчлененной, состоящей из трех частей: основной поперечной тяги 4 и двух боковых тяг - левой 3 и правой 6. Для опоры основной тяги 4 служит маятниковый рычаг 5, который по форме и размерам соответствует сошке 1. Соединение боковых поперечных тяг с поворотными рычагами 2 цапф и с основной поперечной тягой выполнено с помощью шарниров, которые допускают независимые перемещения колес в вертикальной плоскости. Рассмотренная схема рулевого привода применяется главным образом на легковых автомобилях. Рулевой привод, являясь частью рулевого управления автомобиля, обеспечивает не только возможность поворота управляемых колес, но и допускает колебания колес при наезде ими на неровности дороги. При этом детали привода получают относительные перемещения в вертикальной и горизонтальной плоскостях и на повороте передают усилия, поворачивающие колеса. Соединение деталей при любой схеме привода производят с помощью шарниров шаровых либо цилиндрических. 3. Устройство и работа рулевых механизмов Рулевой механизм с передачей типа червяк - ролик Он широко распространен на легковых и грузовых автомобилях. Основными деталями рулевого механизма являются рулевое колесо 4, рулевой вал 5, установленный в рулевой колонке 3 и соединенный с глобоидным червяком 1. Червяк установлен в картере 6 рулевой передачи на двух конических подшипниках 2 и зацеплен с трехгребневым роликом 7, который вращается на шарикоподшипниках на оси. Ось ролика закреплена в вильчатом кривошипе вала 8 сошки, опирающемся на втулку и роликовый подшипник в картере 6. Зацепление червяка и ролика регулируют болтом 9, в паз которого вставлен ступенчатый хвостовик вала сошки. Фиксация заданного зазора в зацеплении червяка с роликом производится фигурной шайбой со штифтом и гайкой. 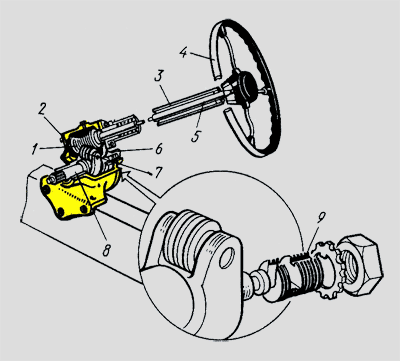 Рулевой механизм автомобиля ГАЗ-53А Картер 6 рулевой передачи закреплен болтами к лонжерону рамы. Верхний конец рулевого вала имеет конические шлицы, на которые посажено и закреплено гайкой рулевое колесо. Рулевой механизм с передачей типа винт - гайка - рейка - сектор с усилителем Его применяют в рулевом управлении автомобиля ЗИЛ-130. Усилитель рулевого управления объединен конструктивно с рулевой передачей в один агрегат и имеет гидропривод от насоса 2, который приводится в действие клиновым ремнем от шкива коленчатого вала. Рулевая колонка 4 соединена с рулевым механизмом 1 через короткий карданный вал 3, так как оси рулевого вала и рулевого механизма не совпадают. Это сделано для уменьшения габаритных размеров рулевого управления. 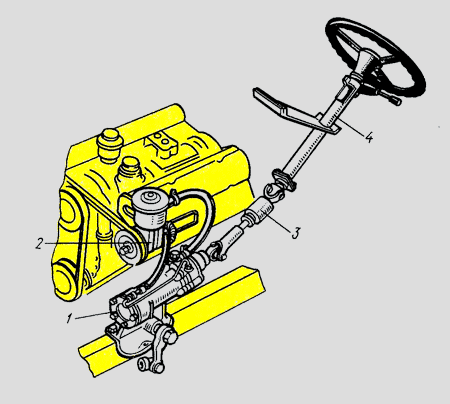 Рулевой механизм автомобиля На следующем рисунке показано устройство рулевого механизма. Основной частью его является картер 1, имеющий форму цилиндра. Внутри цилиндра размещены поршень - рейка 10 с жестко закрепленной в нем гайкой 3. Гайка имеет внутреннюю нарезку в виде полукруглой канавки, куда заложены шарики 4. Посредством шариков гайка зацеплена с винтом 2, который, в свою очередь, соединен с рулевым валом 5. В верхней части картера к нему крепится корпус 6 клапана управления гидроусилителем. Управляющим элементом в клапане является золотник 7. Исполнительным механизмом гидроусилителя служит поршень - рейка 10, уплотненный в цилиндре картера с помощью поршневых колец. Рейка поршня соединена нарезкой с зубчатым сектором 9 вала 8 сошки. 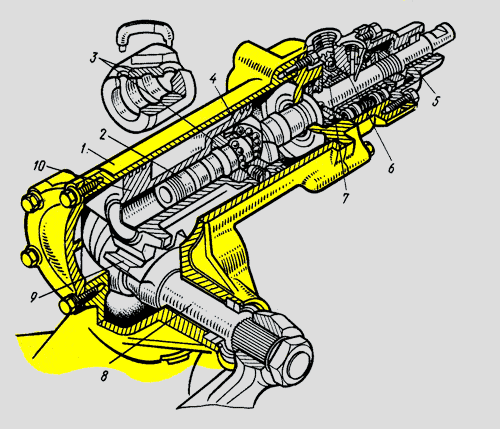 Устройство рулевого механизма с встроенным гидроусилителем Вращение рулевого вала преобразуется передачей рулевого механизма в перемещение гайки - поршня по винту. При этом зубья рейки поворачивают сектор и вал с закрепленной на нем сошкой, благодаря чему происходит поворот управляемых колес. При работающем двигателе насос гидроусилителя подает масло под давлением в гидроусилитель, вследствие чего при совершении поворота усилитель развивает дополнительное усилие, прикладываемое к рулевому приводу. Принцип действия усилителя основан на использовании давления масла на торцы поршня - рейки, которое создает дополнительную силу, передвигающую поршень и облегчающую поворот управляемых колес. [ 1 ] Схема поворота автомобиля Одна из самых важных систем ТС с точки зрения безопасности движения — система рулевого управления, обеспечивающая его движение (поворот) в заданном направлении. В зависимости от конструктивных особенностей колесных ТС различают три способа поворота: -при помощи поворота управляемых колес одной, нескольких или всех осей -созданием разности скоростей неуправляемых колес правого и левого бортов машин (поворот «погусеничному») -взаимным принудительным поворотом звеньев щарнирно-сочлененного ТС Много- или двухзвенные колесные ТС (автопоезда), состоящие из колесного тягача, прицепа (прицепов) или полуприцепа (полуприцепов), осуществляют поворот при помощи управляемых колес только тягача или тягача и прицепного (полуприцепного) звена. Наиболее широкое распространение получили схемы колесных машин с поворотными (управляемыми) колесами. При увеличении числа пар управляемых колес уменьшается минимально возможный радиус поворота машины, т. е, улучшаются маневренные качества ТС. Однако стремление улучшить маневренность за счет применения передних и задних управляемых колес существенно усложняет конструкцию привода управления ими. Максимальный угол повороту управляемых колес обычно не превышает 35 …40°. Схемы поворота двух-, трех- и четырехосных колесных машин с управляемыми колесами 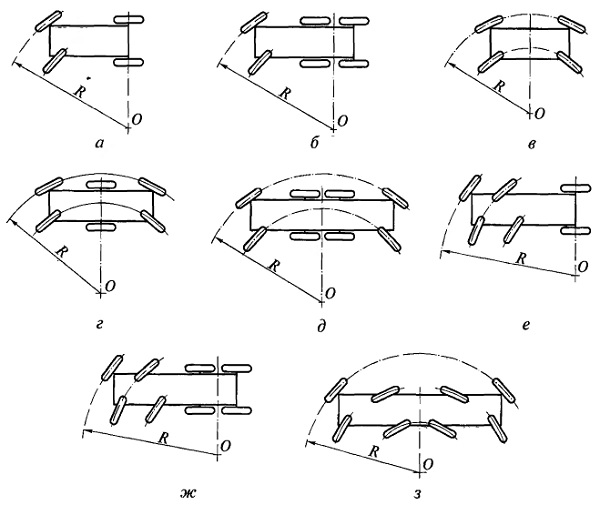 Рис. Схемы поворота двух-, трех- и четырехосных колесных машин с управляемыми колесами: а, б — передними; в — передними и задними; е, ж — первой и второй осей; з — всех осей Схемы поворота колесной машины с неуправляемыми колесами 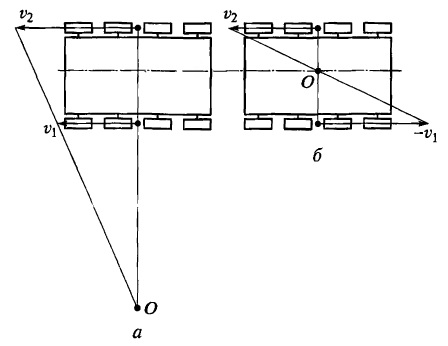 Рис. Схемы поворота колесной машины с неуправляемыми колесами: а — с большим радиусом поворота; б — с нулевым радиусом; О — центр поворота; V1, V2 — скорости движения отстающего и забегающего бортов машины Поворотом управляемых колес ТС водитель заставляет его передвигаться по траектории заданной кривизны в соответствии с углами поворота колес. Чем больше угол их поворота относительно продольной оси машины, тем меньше радиус поворота ТС. Схема поворота «по-гусеничному» принципу используется сравнительно редко и в основном на специальных ТС. Примером может служить колесный тягач с неповоротными колесами и трансмиссией, обеспечивающей поворот тягача практически вокруг его геометрического центра. Такую же схему поворота имеет отечественный луноход, имеющий электромотор-колеса с формулой 8×8. Поворот подобных ТС осуществляется при неодинаковой скорости колес разных бортов машины. Такое управление поворотом наиболее просто обеспечить прекращением подачи вращающего момента на отстающий при повороте борт машины, скорость колес которого уменьшается вследствие их подтормаживания. Чем больше разность скоростей забегающего V2, т.е. внешнего по отношению к центру поворота (точка О), и отстающего V1(внутреннего по отношению к центру поворота) бортов машины, тем меньше радиус ее криволинейного движения. В идеальном случае, если скорости всех колес обоих бортов будут равны, но направлены в противоположные стороны (V2 = -V1), мы получим нулевой радиус поворота, т. е. машина будет поворачиваться вокруг своего геометрического центра. Основными недостатками ТС с неуправляемыми колесами являются повышенный расход мощности на совершение поворота и больший износ шин по сравнению с автомобилями, имеющими управляемые колеса. Шарнирносочлененные схемы поворота ТС для инженерных тягачей. Эти машины обладают хорошей маневренностью (минимальный радиус поворота у них меньше, чем у обычных автомобилей с такой же базой и лучшей приспособляемостью к неровностям дороги (из-за наличия шарниров в сцепном устройстве тягача и прицепного звена), а также обеспечивают возможность использования колес большого диаметра, что улучшает проходимость этих ТС. |