шпоры угату. Шпоры Комиссаров. 1) Техническое обеспечение связи (тос) и автоматизации. (определение и назначение)
 Скачать 1.97 Mb. Скачать 1.97 Mb.
|

|
17. Категории электроприёмников по надёжности (ПУЭ). ПУЭ – правила устройства электроустановок. 1 категория: перерыв электроснабжения которых может повлечь за собой опасность жизни людей, угрозу для безопасности государства, материальный ущерб, нарушению объектов связи и ТВ. Для 1 кат в норм-х режимах работы обеспечение элетроэнергии происходит от 2-х независимых взаиморезервированных источников питания. Перерыв эл/снаб-я при нарушении одного из ист. Допускается на время автоматического восстановления питания. Особая группа: предусм. доп.питание от 3-го независимого взаиморез-го ист.питания. 2 категория. Перерыв эл/снаб-я приводит к массовому недовыпуску продукции, простою механизмов пром.транспорта и нарушению деят-ти значительного кол-ва жителей. Обеспечение эл/энергией от 2-х независимых ИП допустимы перерывы эл/снаб-я на время, необходимое для вкл.резервного питания действиями дежурного персонала. 3 категория. Всё, что подходит не подходит под 1 и 2 кат. Перерыв не должен превышать одних суток. 18. Протокол передачи RS-485 RS-485 – стандарт физического уровня для асинхронной передачи, описывает электрические параметры полудуплексной многоточечной дифференциальной линии связи – общей шине. Информация передаётся дифференциальными сигналами.  Поскольку используется общая шина, количество участников будет зависеть от разрядности (максимум 32 приёмопередатчика). Максимальная длина сегмента 1,2 км. В один момент времени может действовать только один приёмопередатчик. При использовании магистральных усилителей число устройств может 256. При использовании одной витой пары достигается скорость передачи 62 кбит/с, при использовании двух – 2,4 Мбит/с при длине сегмента 100 м. Способы подключения устройств: 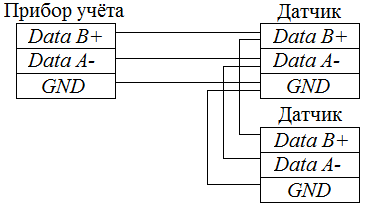 Стандарты на основе RS-485: ModBus, ProfiBus, HDLC, DMX512, IEC60870 19. Архитектура АСУТП АСУТП (автоматизированная система управления техническими процессами) – комплекс аппаратных и программных средств, предназначенный для автоматизации управления оборудованием, осуществляющим технологический процесс. Технологический процесс (ТП) – упорядоченная последовательность взаимосвязанных действий, выполняемая с помощью технических средств для получения заданного результата. 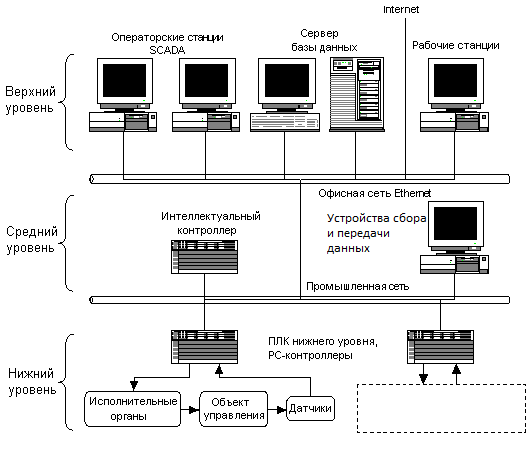 Верхний уровень: HMI, SCADA – сервера и ПО. Средний уровень: ПЛК – программируемые контроллеры, приборы учета. Нижний уровень: датчики, сенсоры, исполнительные механизмы. Функции и задачи АСУТП: - работа с данными и оборудованием; - сбор, регистрация, хранение, обработка и передача данных; - управление оборудованием и параметрами ТП; - реакция на аварийные и нештатные ситуации; - визуализация ТП и отображение его параметров. Состав АСУТП: - технические средства «полевого» уровня; - преобразователи, промышленные контроллеры, регуляторы; - устройства распределенной периферии (вынесенные за пределы контроллеров устройства ввода/вывода); - устройства SCADA и HMI. Функции среднего уровня: - агрегация и передача данных от нижнего уровня к верхнему; - обработка данных согласно заданным алгоритмам; - принятие решений на основе полученной информации; - формирование управляющих команд. 20. Протокол Modbus Modbus – открытый протокол коммуникации на архитектуре ведущий-ведомый; организует связь между электронными устройствами; передача данных через последовательные линии RS-485 и сети TCP/IP; все промышленные системы контроля и управления имеют драйверы для работы с MODBUS сетями. MODBUS RTU: сообщения делятся по паузам. Сообщение начинается/заканчивается интервалом тишины длительностью не менее 3,5 символов. При передаче сообщения не должно быть пауз более чем в 1,5 символа. Проверка целостности: CRC – контрольная сумма.
MODBUS ASCII: используются ASCII символы, начало и конец символа помечаются специальными знаками. Проверка целостности CRC.
Функции протокола: - чтение из регистров. В данной технологии на 1 шлейфе может быть 1 master и несколько slave (адресуется до 247 устройств). Чтение одного из регистров хранения: ведущий отправляет запрос на адрес ведомого с кодом функции 3 (считывание), указывается адрес интересующего регистра и количество регистров для чтения, ведомый отвечает пакетом, в котором повторяет собственный адрес, номер обрабатываемой функции и значение из запрашиваемого регистра. Модель данных Спецификация протокола определяет четыре таблицы данных:
Логические ошибки Для сообщений об ошибках Modbus RTU предусматривает, что устройства могут отсылать ответы, свидетельствующие об ошибочной ситуации. Признаком того, что ответ содержит сообщение об ошибке, является установленный старший бит кода команды. 1. Slave принимает корректный запрос и обраб его, возвращает ответ. 2. Slave не принимает значение, ответа не нет. Master диагностирует ошибку по таймауту. 3. Slave принимает запрос, обнаруживает ошибку, ответа нет. Master диагностирует ошибку по таймауту. 4. Slave принимает запрос, не может его обраб (обращение к несуществующему регистру и т.д.), отправляется ответ содержащий в себе данные об ошибке 21. Протоколы промышленных телемеханических сетей Промышленный Ethernet: отличия от обычного Ethernet - стандарты на кабели и разъемы удовлетворяют специфическим требованиям технологического процесса; - протокол частой передачи низкообъемной информации RFC1006 в дополнение к TCP/IP; - организация кольцевых восстанавливаемых топологий быстрее, чем в RSTP; - использование протоколов синхронизации IEEE1588. На основе промышленного Ethernet созданы Profinet и EtherCAT. Промышленный Ethernet используется для обмена данными между программируемыми контроллерами и системами человеко-машинного интерфейса, для обмена данными между контроллерами, для подключения к контроллерам удаленного оборудования (датчиков и исполнительных устройств) EtherCAT – стандарт промышленной сети, разработан с целью использования технологии Ethernet для автоматизации приложений, которые требуют частого обновления времени (также называемым временем цикла) с низким дрожанием связи (для синхронизации) и низкими затратами на аппаратное обеспечение. Протокол EtherCAT оперирует пакетами, передаваемыми непосредственно внутри стандартного кадра IEEE 802.3 Ethernet. Пакет EtherCAT неделим и состоит из заголовка (2 байта) и одного или более сообщения. Последовательность данных не зависит от физического порядка узлов в сети; адресация может быть обработана в любом порядке. Широковещательная, групповая передача данных и передача данных между конечными получателями также возможна и должна быть реализована на главном устройстве в текущем сегменте сети. Ethernet Powerlink – протокол передачи данных реального времени: - гарантируется передача срочных данных в очень короткие изохронные интервалы, осуществляется высокоточная синхронизация времени для всех узлов в сети (точность порядка микросекунд); - передача некритичных данных, для которых не требуется гарантий реального времени, осуществляется в отдельном асинхронном канале Канальный уровень Ethernet расширяется механизмом планирования обменов на шине. Вводятся выделенные промежутки времени, в которые доступ к шине разрешен только одному из устройств. Все время работы шины делится на изохронные и асинхронные фазы. Во время изохронной фазы передаются данные, критичные к времени доставки. Асинхронная фаза позволяет передавать значительные объёмы данных, для которых не требуются гарантии времени доставки. Управляющий узел распределяет времена доступа к среде путём рассылки специальных управляющих сообщений. В результате в каждый момент времени только один узел имеет доступ к сети. Такая система управления позволяет избежать коллизий. 21. Устройства среднего уровня АСУТП (ПЛК, УСПД, ЭНиП) ПЛК (программируемый логический контроллер) предназначен для выпонения алгоритмов управления, записанных в виде программы в память (она может многократно меняться и загружаться с помощью среды разработки). ПЛК могут иметь входы и выходы для сигналов измерения, коммутируемые порты Ethernet, RS-485, R-422, встроенную операторскую панель. Коммутируемые контроллеры используются для сбора данных с интеллектуальных устройств, конвертации протоколов, передачи данных в SCADA системы и диспетчерские центры (могут отсутствовать входные и выходные модули). УСПД (устройства сбора и передачи данных) предназначены для получения информации с контрольно-измерительных приборов и передачи на ПЛК, коммутируемые контроллеры, не выполняют задач по обработке данных, не имеют сигнальных выходов, то есть в основном используются сетевые интерфейсы. Регулятор – узкоспециализированный контроллер, выполняет измерение и регулирование какой-либо физической величины в технологическом процессе, дешевле и проще чем ПЛК. 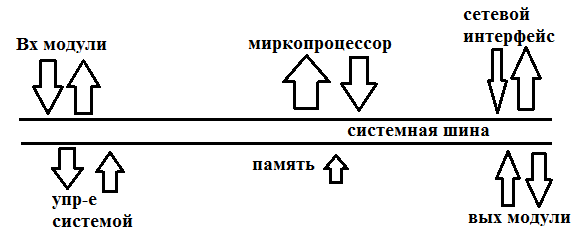 Функции среднего уровня: - агрегация и передача данных от нижнего уровня к верхнему; - обработка данных согласно заданным алгоритмам; - принятие решений на основе полученной информации; - формирование управляющих команд. 23. Верхний уровень АСУТП, SCADA-система, OPC-сервер Задачи верхнего уровня: - обеспечение человеко-машинного интерфейса (HMI – human machine interface) – отображение графиков, контрольных величин, оповещение об аварийных ситуациях, визуализация технологических процессов; - сбор, агрегация, хранение данных; - получение данных со среднего уровня; - передача данных в другие системы. SCADA – система диспетчерского управления и сбора данных; программный пакет, предназначенный для разработки и обеспечения работы в реальном времени системы сбора, обработки и отображения данных. Подсистемы SCADA: - драйверы (серверы) ввода/вывода для обеспечения связи с ПЛК, коммутируемыми контроллерами и другими устройствами среднего уровня; - система логического управления для обеспечения выполнения программ; - человеко-машинный интерфейс (HMI); - база данных реального времени для обеспечения сохранения истории процессов; - генератор отчётов; - внешние интерфейсы OPC, DLL. SCADA-системы: - Автономные: система состоит из одной или нескольких рабочих станций оператора, которые не «знают» друг о друге. Все функции системы выполняются на единственной (нескольких независимых) станции(ях). Преимущества: простота; низкая отказоустойчивость. Недостатки: не обеспечивается истинность данных (исторические данные могут отличаться между разными станциями), - Клиент-Серверные: система выполняется на сервере, а операторы используют клиентские станции для мониторинга и управления процессом. Высоконадёжные системы строятся на базе двойного либо тройного резервирования серверов и дублирования клиентских станций оператора, дублирования сетевых подключения сервер-сервер и клиент-сервер. При данной архитектуре возможно разделение функций SCADA-системы между серверами. - Распределенные: вычисления осуществляются на нескольких взаимосвязанных вычислительных устройствах, часто с функцией взаимного резервирования. Распределенные SCADA-системы с взаимным резервированием отличаются повышенной надежностью. OPC (Open Platform Communications) – семейство программных технологий, предоставляющих единый интерфейс для управления объектами автоматизации и технологическими процессами. OPC-сервер обеспечивает обмен данными (запись и чтение) между клиентской программой и физическими устройствами. 24. Сравнение интерфейсов RS-485, HART HART-протокол (Highway Addressable Remote Transducer – магистральный адресуемый удаленный преобразователь) является открытым стандартом на метод сетевого обмена, который включает в себя не только протокол взаимодействия устройств, но и требования к аппаратуре канала связи. HART находит применение для связи контроллера с датчиками и измерительными преобразователями, электромагнитными клапанами, локальными контроллерами, для связи с искробезопасным оборудованием. Передача данных организуется с помощью фазовой манипуляции (используются синусоидальные сигналы частотой 1200 Гц для «1» и 2200 Гц для «0»), при этом ток сигнала находится в диапазоне от 4 до 20 мА. Данный протокол может использоваться для передачи данных в выделенной телефонной линии По сравнению с RS-485 HART обеспечивает значительно меньшую скорость передачи данных (до 9600 бит/с против 62 кбит/с), однако максимальная длина сегмента в HART выше (2-3 км против 1,2 км), а также используемые токи и напряжения позволяют использовать HART во взрывоопасном оборудовании (мощность сигнала меньше, чем у остальных стандартов). 25. Протокол Profinet PROFINET – открытый промышленный стандарт для автоматизации. PROFINET использует TCP/IP и IT стандарты, и режим реального времени Ethernet. Концепция имеет модульную структуру, и пользователи могут выбрать каскадирование самих функций. Они отличаются в зависимости от типа обмена данными для выполнения отчасти очень высоких требований к скорости. В PROFINET, существует две перспективы PROFINET CBA и PROFINET IO. PROFINET CBA подходит для компонентов на основе TCP/IP, а PROFINET IO используется для общения в режиме реального времени с требованиями в модульных инженерных системах. PROFINET IO – для связи реального времени (RT) и изохронного реального времени (IRT) с децентрализованной периферией. Обозначения RT и IRT просто описывают реальные свойства времени для общения в PROFINET IO. PROFINET CBA и PROFINET IO могут общаться в то же время на одной и той же системной шине. Они могут работать по отдельности или в сочетании, так что подсистема ввода-вывода PROFINET выступает как система PROFINET CBA с точки зрения системы. PROFINET CBA состоит из различных компонентов автоматизации. Один компонент охватывает все механические, электрические и IT переменные. Основная идея CBA – вся система автоматизации может быть разделена на автономные операционные подсистемы. Структура и функции могут оказаться в идентичном или изменённом виде в нескольких системах. Каждый компонент управляется изменяемым числом входных сигналов. В рамках компонента программа управления выполняет требуемые функции и передает соответствующие выходные сигналы на другой контроллер. Связь с использованием PROFINET CBA (без реального времени) подходит для шин с циклом опроса приблизительно 50 ... 100 мс. Параллельно запущенный RT-канал обеспечивает время цикла, сопоставимое с PROFINET IO (несколько мс). PROFINET IO – связь с областью, соединенную с периферийными устройствами. Основа – в каскадной идее в реальном времени. PROFINET IO определяет обмен данными между контроллерами (ведущее устройство) и устройствами (ведомое устройство), а также параметры настройки и диагностики. PROFINET IO – для быстрого обмена данными между областью Ethernet-устройств и поддержания модели поставщик-потребитель. Система PROFINET IO состоит: - Контроллер ввода-вывода, который управляет задачами автоматизации. - Устройства ввода-вывода, которые являются областью устройства, контролируются и управляются контроллером ввода-вывода. Устройство ввода-вывода может состоять из нескольких модулей и вспомогательных модулей. - Руководитель ввода-вывода программного обеспечения базируется, на основе ПК для настройки параметров и диагностики отдельных устройств ввода-вывода. В PROFINET IO, данные обработки и аварийных сигналов всегда передаются в реальном времени (RT). Режим реального времени в PROFINET основан на определении параметров сообщения, которые допускают ограниченное время для выполнения RT сервисов в рамках цикла шины. В режиме реального времени данные обрабатываются с более высоким приоритетом, чем TCP (UDP) / IP данные. RT обеспечивает основу для общения в реальном времени в области периферии и для компонентной модели PROFINET (PROFINET CBA). Этот тип обмена данными разрешает цикличность шины в диапазоне от нескольких сотен микросекунд. В устройствах с функцией изохронного обмена данными коммутационные порты, интегрированные непосредственно в промышленное устройство. Продолжительность циклов обмена данными находится в диапазоне от нескольких сотен мкс до нескольких мс. Отличием коммуникации в режиме реального времени является высокая степень детерминизма, так что начало цикла обмена по шине поддерживается с высокой точностью. Начало цикла обмена по шине может отклоняться не более чем на 1 мкс (дрожание). IRT требуется для приложений управления движением (процессы управления позиционированием). 1) Техническое обеспечение связи (ТОС) и автоматизации. (определение и назначение) 2) Что включает технические средства обеспечения управления информационными ресурсами. Требования к комплексу технических средств. 3) Единая сеть электросвязи (ЕСЭ) РФ, (составные части). 4) Проектирование линии передачи (исходные данные, задания на проект, разделы). 5) Нормативные документы используемые при проектировании и эксплуатации систем связи (РД, ГОСТ, ВСН, ВНТП, ПУЭ, приказы мин. связи и массовых коммуникаций). 6) Основные требования к базовым станциям сети мобильной связи в соответствии с РД 45.162-2001. 7) Устройство защитного отключения, автоматические выключатели 8) Система электропитания предприятия связи, требования, структурная схема 9) Типы систем заземления 10) Системы заземления TN-C, TN-S, TT 11) Отсутствует 12) Системы автоматизации, основные понятия, определения (типы датчиков). 13) Протокол SNMP, MIB, SMI. 5 типов сообщений SNMP. Версии SNMP 14) OAM, основные подходы и протоколы 15) Средства управления и мониторинга в сетях TCP/IP (Telnet, ICMP, …) 16) ЦОД, структура, основные требования к элементам. Системы заземления TN-C, TN-S, TT (по вопросам от Комиссарова совпадает с 10). 17) Категории электроприёмников по надёжности (ПУЭ). 18) Протокол передачи RS-485 19) Архитектура АСУТП (состав, функции) 20) Протокол Modbus 21) Протоколы промышленных телемеханических сетей 22) Устройства среднего уровня АСУТП (ПЛК, УСПД, ЭНиП) 23) Верхний уровень АСУТП, SCADA-система, OPC-сервер 24) Сравнение интерфейсов RS-485, HART 25) Протокол Profinet |