шпоры билоус1. 1 вопрос Место силовых преобразователей в электроприводе
 Скачать 5.01 Mb. Скачать 5.01 Mb.
|

|
17 вопрос Требования, предъявляемые к параметрам управляющих импульсов ТП. Требования, предъявляемые к параметрам включающих импульсов. 1.Мощность управляющих импульсов (величина тока и напряжения) должна быть достаточной для надежного включения тиристора при самых неблагоприятных условиях в допустимой области их изменения. К таким неблагоприятным условиям можно отнести низкое значение анодного напряжения, что имеет место при малых величинах угла управления . Вторым неблагоприятным фактором можно считать низкую температуру окружающей среды. Это случается при работе преобразователя на открытом воздухе. Наконец, третьим неблагоприятным фактором является высокий уровень помех, на фоне которых полезный сигнал должен существенно выделяться по своему уровню.
Асимметрией управляющих импульсов называется самопроизвольное отклонение угла от заданного значения, вызванное целым рядом неконтролируемых процессов в системе формирования и фазового сдвига импульсов. К факторам, вызывающим увеличение асимметрии можно отнести: искажение формы синусоидального питающего напряжения, недостаточно высокую чувствительность нуль- органа, срабатывание которого определяет момент выдачи включающего импульса, недостаточно высокую крутизну переднего фронта включающих импульсов. Общим для всех схем следствием асимметрии является то, что угол “min” при работе ТП в инверторном режиме должен выбираться с учетом этой асимметрии во избежание возможного опрокидывания инвертора. В обычных нулевых и мостовых схемах преобразователей асимметрия управляющих импульсов приводит к различным длительностям пропускания тока отдельными вентилями. В результате этого:
В литературе приводятся допустимые значения асимметрии. Так, для шестипульсного преобразователя асимметрия не должна превышать .
Разброс моментов включения определяется двумя факторами: а) собственно асимметрией системы управления; б) различием характеристик включения отдельных вентилей, что при конечных значениях крутизны переднего фронта управляющих импульсов также приводит к сдвигу моментов включения вентилей. Согласно литературе, крутизна не должна быть ниже 100в на градус.
Наиболее распространенная форма включающих импульсов- прямоугольная. Минимальная длительность импульсов определяется временем, необходимым для нарастания тока в анодной цепи до значения тока включения тиристора, который обычно в 2-3 раза превосходит ток удержания. Это время при активном характере нагрузки практически совпадает с временем включения тиристора, т.е. находится в диапазоне от единиц до нескольких десятков микросекунд. Наличие индуктивности в анодной цепи может существенно увеличить минимально необходимую длительность импульса по сравнению со временем включения тиристора. В этом случае нижний предел продолжительности импульса определен промежутком времени, необходимым для того, чтобы ток анодной цепи успел нарасти до величины тока включения, при котором тиристор остается включенным и при отсутствии управляющего импульса. Для обеспечения нормальной работы тиристоров в такой широко распространенной схеме как трехфазная мостовая, где постоянно ток проходит через два (в предположении мгновенной коммутации) вентиля, один из которых в катодной группе, а другой- в анодной, требуются либо широкие включающие импульсы, либо подача на каждый тиристор сдвоенных узких импульсов. Это объясняется тем, что при запуске схемы в работу или при работе в режиме прерывистого тока, необходимо, чтобы импульсы присутствовали одновременно на двух тиристорах из разных групп. Одновременное присутствие включающих импульсов на соответствующей паре тиристоров анодной и катодной групп может быть обеспечено, если длительность импульсов будет больше, чем t = T/6, где T- период переменного напряжения питания. Но задача часто решается другим путем: подачей на каждый тиристор сдвоенных узких импульсов, первый из которых соответствует очередному включению тиристора, согласно порядку коммутации тиристоров в схеме, а другой- повторному (в момент включения очередного тиристора противоположной группы). Основными недостатками управления широкими импульсами являются увеличение объема и массы импульсных трансформаторов в системе управления и увеличение потерь в тиристоре. 18 вопрос Классификация СИФУ. Функциональная схема канала СИФУ. Назначение отдельных элементов Классификация и принципы построения СИФУ. СИФУ можно разделить на два класса:
В синхронных системах каждый управляющий импульс жестко привязан к синусоиде своей фазы. место импульса определяется координатой управления- углом . Угол управления ( ) есть угол, выраженный в электрических градусах, отсчитываемый от точки естественной коммутации двух коммутируемых фаз до момента включения тиристора последующей фазы. В асинхронных СИФУ угол управления в явном виде не связан с координатой t сети. Он получается как результат регулирования интервалов между импульсами управления. Асинхронные СИФУ являются замкнутыми системами, обеспечивающими регулирование выпрямленного напряжения по требуемому закону. В них действует отрицательная обратная связь по выходному напряжению ТП, регулирующая интервалы между двумя соседними включающими импульсами. Угол управления ( ) отсчитывается от предыдущего импульса. ti = ti-1 + 2/mn + i (UУ) 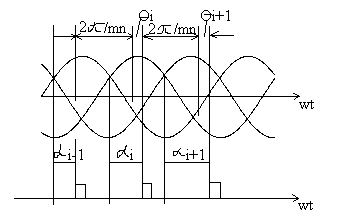 Рис 28 Величина i определяет приращение угла на интервале между двумя соседними управляющими импульсами. Система регулирования (рис 29) содержит аналоговую часть и дискретную, связывающую СИФУ и ТП. В СИФУ асинхронной системы управления должно быть предусмотрено ограничение минимального и максимального значений угла допустимыми величинами, что существенно усложняет систему. Это является основным ее недостатком. Главным достоинством системы является ее высокая помехоустойчивость. На ее работу не влияют искажения питающего напряжения, которые могут иметь место в сети переменного тока. 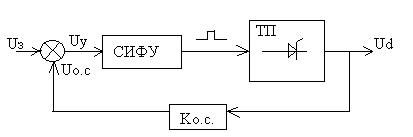 Рис 29 Асинхронные СИФУ находят в практике ограниченное применение. В дальнейшем мы будем рассматривать только первый тип систем - синхронные СИФУ. 3.5.1.1.Принципы построения синхронных СИФУ. Синхронные СИФУ делятся на два вида:
Канальность СИФУ связана с тем фактом, что система должна обеспечить управление несколькими полупроводниковыми приборами- тиристорами, включенными в разные фазы и на разную полярность напряжения сети. Канальность СИФУ также связана с тем, что из всех функций системы управления выделяют одну главную- функцию сдвига управляющих импульсов относительно фазы синусоидального питающего напряжения. Фазовый сдвиг управляющих импульсов может быть реализован в одном фазосдвигающем устройстве и, после этого, сдвинутые на угол импульсные сигналы распределяются по тиристорам силовой схемы ТП, пройдя, предварительно, усиление в выходных устройствах. Такая система управления относится к одноканальным. Если же управление тиристорами одного плеча моста, или одной фазы в нулевой схеме осуществляется автономно и не связано с управлением другими тиристорами, такие системы относятся к многоканальным. Таким образом канал- это часть СИФУ, содержащая определяющий функциональный элемент- фазосдвигающее устройство. В многоканальной СИФУ в каждом канале автономно определяется своя точка естественной коммутации между фазами, токи которых предстоит скоммутировать данным вентилем. Затем осуществляется фазовый сдвиг сигнала на угол в своем отдельном фазосдвигающем устройстве. На рис 30 изображена функциональная схема многоканальной СИФУ. В ней видно, что каждый канал имеет свое фазосдвигающее устройство, а число каналов должно быть равно числу плеч в мостовой схеме выпрямления. Синхронизирующее устройство посылает в СИФУ “n” синхронизирующих сигналов в моменты равенства ЭДС фаз, коммутация которых должна быть выполнена данным вентилем. 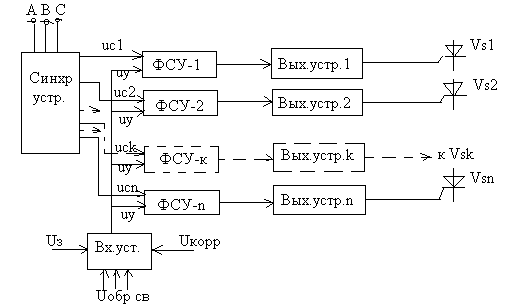 Рис 30 Кроме сигнала синхронизирующего устройства на вход всех ФСУ поступает аналоговый сигнал UУ , величина которого определяет угол задержки включения всех вентилей ( ). Угол во всех ФСУ должен быть одинаков, поэтому и сигнал управления (UУ) на каждом канале один и тот же. 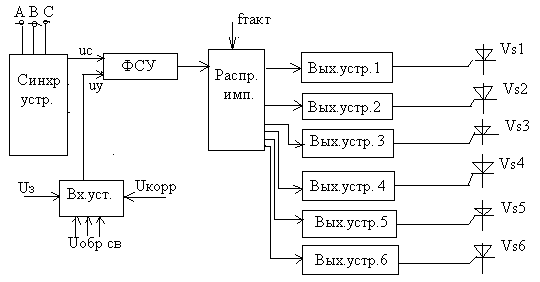 Рис 31 На рис 31 изображена функциональная схема одноканальной СИФУ. В отличие от многоканальной здесь фазовый сдвиг осуществляется одним фазосдвигающим устройством, выходной сигнал которого поступает на распределитель импульсов в виде кратковременного импульса, частота поступления которого- 50 Гц. Распределитель импульсов выдает шесть сдвинутых по фазе на 60 импульсов, поступающих на выходные устройства, где эти импульсы усиливаются и поступают на управляющие электроды тиристоров. В течение одного периода переменного напряжения распределитель импульсов успевает выдать шесть импульсов на выходные устройства и т.о. завершается один цикл включения тиристоров. Как и в предыдущей схеме, величина угла управления “” определяется величиной управляющего напряжения “UУ”, которое выдается входным устройством после сопоставления всех поступающих на него сигналов. Импульс на выходе ФСУ сдвинут на угол “” относительно точки естественной коммутации, местоположение которой на оси t определено импульсом “Uc”. Важным достоинством одноканальной СИФУ является высокая симметрия управляющих импульсов, которая достигается постоянством тактовой частоты распределителя импульсов (РП). Недостаток системы- ее сложность. Она связана с необходимостью обеспечения четкой работы распределителя импульсов. Многоканальные системы, хотя содержат большее число элементов в функциональной схеме, тем не менее, реализуются проще одноканальных, поэтому при пульсности выше двух в ТП заводского изготовления используются, как правило, многоканальные СИФУ.
3.5.2.1. Синхронизирующие устройства (СУ). Назначением СУ является привязка включающих импульсов тиристоров к определенным точкам синусоидального напряжения питания силовой части преобразователя. Поэтому, если преобразователь трехфазный, на СУ должно быть непременно подано 3-х фазное питающее напряжение. Простейшим, наиболее распространенным СУ-ом является трансформатор. В качестве примера рассмотрим СУ, которое используется в системах управления 3-х фазных мостовых преобразователей. Схема этого устройства, представляющего собой трансформатор, на первичную обмотку которого подается трехфазное напряжение сети, изображена на рис 32: 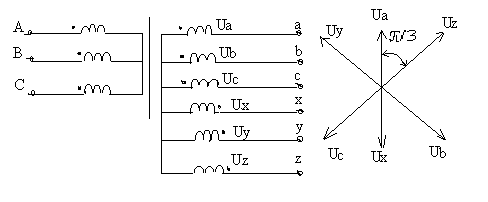 Рис 32 В соответствии с принципом действия 3-х фазного мостового ТП на его тиристоры при шестиканальной системе управления должны поступать включающие импульсы, сдвинутые друг относительно друга на угол /3. Вторичные обмотки синхронизирующего устройства выполнены со средней точкой, причем, эта точка соединяет начало и конец каждой полуобмотки. Поэтому со вторичных обмоток снимается шестифазное напряжение, векторная диаграмма которого представлена на том же рисунке. Схема позволяет использовать как фазные, так и линейные напряжения вторичных обмоток синхронизирующего устройства. Так точке естественной коммутации линейных напряжений “ау” и “az” (1) соответствует переход через нулевое значение напряжения “bz” (2). 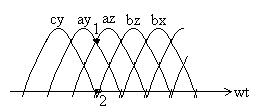 Рис 33 Этот переход может быть легко зафиксирован с помощью вентильного элемента и, значит, в этот момент может быть послан импульс в фазосдвигающее устройство, которое, с этого момента начинает отсчет угла . Т.о. синхронизирующее устройство определяет момент естественной коммутации и в это время посылает сигнал в ФСУ. Недостатком синхронизирующих устройств, выполненных в виде трансформатора, является чувствительность параметров напряжений вторичных обмоток к амплитудным и фазовым искажениям питающей сети, а также к различного рода помехам, возникающим в ней при эксплуатации. Для устранения этих помех к СУ подключают различные фильтры, как пассивные, состоящие обычно из реактивных элементов, так и активные.
Назначение ФСУ в СИФУ ТП - регулирование фазы включающих импульсов тиристоров. Возможны различные принципы их реализации, но неизменным является то, что ФСУ осуществляет сдвиг импульса относительно момента естественной коммутации в сторону запаздывания на угол , величина которого регулируется в зависимости от значения управляющего напряжения UУ . Мы рассмотрим два принципа фазосмещения, нашедших распространение в реальных ТП. Один из них называется вертикальный, другой- интегральный принципы. 3.5.3.Входные устройства СИФУ ТП. Назначение входного устройства - сформировать аналоговый сигнал управления (UУ ) на СИФУ ТП, учитывающий задающее воздействие, воздействие сигналов обратных связей, корректирующее воздействие. Для реализации возложенных на входное устройство (ВУ) функций необходимо осуществить:
Каждая из перечисленных функций выполняется, обычно, своим, специальным, предназначенным для этого устройством, схемная и элементная реализация которого может иметь массу вариантов. Рассматривать эти варианты нецелесообразно, но некоторые тенденции в реализации этих устройств можно отметить:
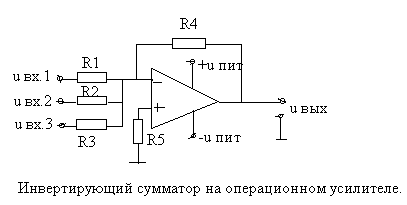 Рис 38
3.5.4.Выходные устройства СИФУ ТП. (формирователи импульсов). Обычно в системах управления операции формирования импульсов, их усиления и гальванической развязки с системой управления осуществляются одним узлом, который, в дальнейшем, именуется “выходным устройством” (Вых.У). В других литературных источниках они именуются “формирователями импульсов” (ФИ). Примером может служить устройство, схема которого представлена на рис 39: Оно состоит из: выходного транзистора VT, мощность которого позволяет обеспечить все требуемые параметры управляющих импульсов; импульсного трансформатора (Тр- И), со вторичной обмотки которого снимаются импульсы, поступающие на управляющий электрод тиристора. 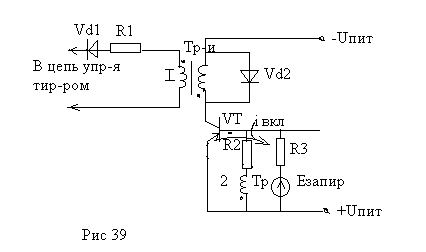 Существенное влияние на параметры включающего импульса в формирователе импульсов (ФИ) оказывает импульсный трансформатор. Одним из основных требований к нему является обеспечение минимального искажения трансформируемого импульса. С этой целью при разработке этих трансформаторов применяют специальные меры по их конструктивному исполнению. В частности, конструкцию магнитопровода и расположение витков первичной и вторичных обмоток выбирают из условий обеспечения минимальных значений потоков рассеяния и межвитковых емкостей. Например, используют кольцевые, витые из пермалоевой магнито мягкой ленты сердечники и экранированный намоточный провод. Это объясняется тем, что потоки рассеяния, характеризуемые обычно в трансформаторе индуктивностью рассеяния обмоток, влияют на передачу фронта импульса. Если индуктивности рассеяния и межвитковые емкости велики, то фронт импульса на вторичной обмотке становится более пологим. В приведенной схеме для интенсивного нарастания тока в первичной обмотке трансформатора в момент формирования импульса введена положительная обратная связь, для чего предусмотрена дополнительная вторичная обмотка трансформатора, включенная в цепь управления (2). Для предотвращения утечки тока через выходную цепь (Э-К) транзистора и намагничивания сердечника трансформатора этими токами утечки в промежутках между рабочими импульсами, предусмотрен источник запирающей ЭДС (Eзапир.), который запирая транзистор в промежутках между рабочими импульсами, предотвращает подмагничивание сердечника, но не препятствует четкому включению транзистора VT при создании условий для прохождения iвкл. Диод VD2 , установленный параллельно первичной обмотке трансформатора, затягивает процесс размагничивания импульсного трансформатора в промежутках между рабочими импульсами и, этим самым, защищает транзистор VT от пробоя импульсом перенапряжения, который возник бы при отсутствии VD2 . 19 вопрос Вертикальный и интегральный принципы фазосмещения в СИФУ ТП. Способ обеспечения линейной зависимости Сущность вертикального фазового управления заключается в сравнении переменного напряжения (пилообразной, синусоидальной, треугольной и других форм) с постоянным напряжением регулируемой величины, поступающим от устройств автоматического регулирования. На рис 34 представлена структурная схема одного из вариантов ФСУ подобного типа. Основными узлами его являются генератор пилообразного напряжения (ГПН) синхронизированный с синусоидальным питающим напряжением с помощью СУ, нуль-орган НО (компаратор) и источник регулируемого постоянного напряжения, величина которого UУ регулируется вручную или автоматически. В этой схеме формирование включающего импульса происходит в момент равенства пилообразного напряжения генератора Uг и напряжения управления UУ. При изменении UУ изменяется фаза управляющего импульса. Функции сравнивающего устройства выполняет нуль- орган “НО”, на входы которого поступают напряжения UУ и Uг. Нуль- орган может быть выполнен по различным схемам и на разной элементной базе. Например, может быть использована схема компаратора, выполненная на операционном усилителе. Г 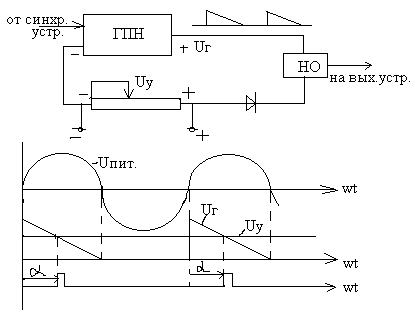 енератор пилообразного напряжения в описанной схеме имеет линейно спадающее напряжение, мгновенное значение которого сравнивается с UУ. Обычно в таких ГПН используется процесс заряда емкости постоянным по величине током. енератор пилообразного напряжения в описанной схеме имеет линейно спадающее напряжение, мгновенное значение которого сравнивается с UУ. Обычно в таких ГПН используется процесс заряда емкости постоянным по величине током.Рис 34 Недостатком этого ГПН является нелинейность характеристики “вход-выход” тиристорного преобразователя. Эта нелинейность обусловлена нелинейной зависимостью Ed = (). При линейном пилообразном напряжении сохраняется линейная зависимость = (UУ ), но зависимость выходной ЭДС от UУ остается нелинейной. Это обстоятельство является существенным недостатком ТП, т.к. в системах АЭП приходится устранять эту нелинейность теми или иными методами. Иногда указанная нелинейность компенсируется за счет нелинейности опорного напряжения (переменное напряжение, которое сравнивается по величине с UУ ). Нелинейность опорного напряжения должна быть такой, чтобы она компенсировала нелинейность регулировочной характеристики ТП. Чаще всего в качестве опорного напряжения используется часть синусоиды напряжения питания ТП, а именно ее косинусоидальная часть. На рис 35 изображена диаграмма напряжения трехфазного нулевого ТП, а также, диаграмма напряжений при формировании управляющих импульсов. Как и на предыдущей диаграмме здесь реализован вертикальный принцип фазосмещения. При этом, в качестве опорного напряжения использована косинусоидальная часть переменного напряжения не участвующей в коммутации фазы. Так, при коммутации фаз “a”-“b” опорным напряжением является “перевернутая” фаза “c”; при коммутации фаз “b”-“c”, опорное напряжение- “перевернутая” фаза “а” и т.д. В соответствии с диаграммой, зависимость угла от UУ - арккосинусоидальная ( = arccos UУ ), зависимость Ud от - косинусоидальная (Ud = Ud0 cos ). Зависимость же Ud = (UУ ), вследствие того, что одна нелинейность компенсирует другую, оказывается линейной. Это показано на рис 36: 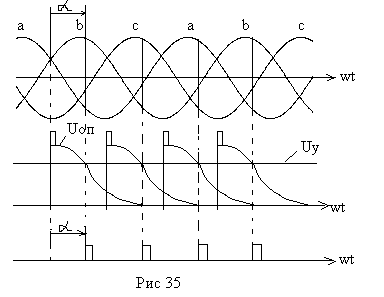 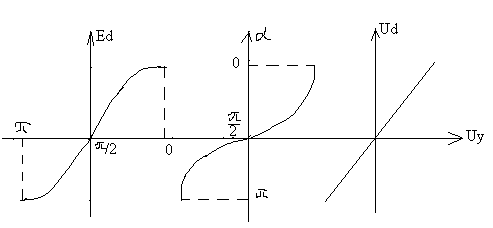 Рис 36 Достоинства описанной системы очевидны. Линейность характеристики вход-выход тиристорного преобразователя существенно облегчает включение его в систему автоматического регулирования координат электропривода. Во-вторых, облегчается синхронизация опорного напряжения с напряжением питающей сети, т.к. это опорное напряжение не что иное, как часть синусоиды одной из фаз того- же напряжения сети. Однако, на пути внедрения этой системы стояли некоторые объективные трудности. Дело в том, что напряжению сети свойственна некоторая нестабильность, что затрудняло использование его в качестве опорного напряжения. Такая нестабильность, как высокочастотные искажения синусоиды устраняется с помощью фильтров. Сложнее преодолеваются трудности, связанные с “посадками” напряжения, которые допускаются “Правилами эксплуатации электроустановок” в определенных пределах. Но в СИФУ уменьшение амплитуды опорного напряжения чревато пропусками управляющих импульсов, что недопустимо. Во избежание этого, в высшей точке опорного напряжения создается импульс напряжения, что не позволяет UУ при максимальных его значениях избежать пересечения с Uопорн .(рис 35). Наконец, последняя трудность связана с изменяющимся наклоном кривой опорного напряжения. Чувствительности нуль- органа может не хватить для четкого его срабатывания, когда опорное напряжение выполаживается, т.е. в верхней и в нижней точках. Возможность преодоления этого затруднения реализовалась, когда появились компараторы на операционных усилителях с очень большими коэффициентами усиления. В настоящее время СИФУ, обеспечивающие линейность характеристики “вход- выход” ТП получают все более широкое распространение. 3.5.2.4.Интегральный принцип фазосмещения управляющих импульсов ТП. Сущность этого принципа фазосмещения можно прояснить, рассмотрев структурную схему, изображенную на рис 37: 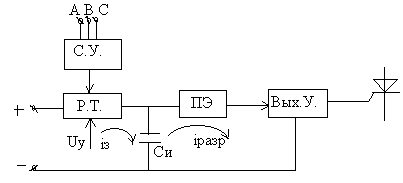 Рис 37 В схему входят следующие элементы:
Схема работает следующим образом: В моменты естественной коммутации СУ посылает сигнал (импульсы) на РТ. Начиная с момента естественной коммутации РТ обеспечивает заданное значение тока заряда емкости си . Время накопления заряда на емкости до величины потенциала срабатывания порогового элемента- это время задержки подачи управляющего импульса на управляющий электрод тиристора. Оно определяет величину угла управления “”. Дальше схема работает так, как сказано выше. Достоинством схем с интегральным принципом фазосмещения является их простота и надежность. Их недостаток- более низкая точность поддержания величины угла “” на заданном значении. Такие системы находят применение в маломощных ТП с нежесткими требованиями к статическим и динамическим показателям электропривода. Диапазон мощностей электропривода с описанными ТП - (215)кВт. 20 вопрос |