шпоры билоус1. 1 вопрос Место силовых преобразователей в электроприводе
 Скачать 5.01 Mb. Скачать 5.01 Mb.
|

|
Основные узлы СИФУ. Принципы их функционирования. Основные узлы многоканальной СИФУ. Синхронизирующие устройства (СУ). Назначением СУ является привязка включающих импульсов тиристоров к определенным точкам синусоидального напряжения питания силовой части преобразователя. Поэтому, если преобразователь трехфазный, на СУ должно быть непременно подано 3-х фазное питающее напряжение. Простейшим, наиболее распространенным СУ-ом является трансформатор. В качестве примера рассмотрим СУ, которое используется в системах управления 3-х фазных мостовых преобразователей. Схема этого устройства, представляющего собой трансформатор, на первичную обмотку которого подается трехфазное напряжение сети, изображена на рис 32: 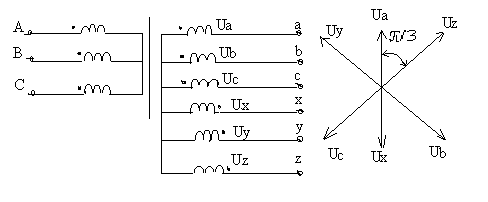 Рис 32 В соответствии с принципом действия 3-х фазного мостового ТП на его тиристоры при шестиканальной системе управления должны поступать включающие импульсы, сдвинутые друг относительно друга на угол /3. Вторичные обмотки синхронизирующего устройства выполнены со средней точкой, причем, эта точка соединяет начало и конец каждой полуобмотки. Поэтому со вторичных обмоток снимается шестифазное напряжение, векторная диаграмма которого представлена на том же рисунке. Схема позволяет использовать как фазные, так и линейные напряжения вторичных обмоток синхронизирующего устройства. Так точке естественной коммутации линейных напряжений “ау” и “az” (1) соответствует переход через нулевое значение напряжения “bz” (2). 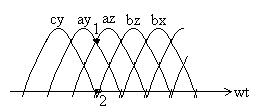 Рис 33 Этот переход может быть легко зафиксирован с помощью вентильного элемента и, значит, в этот момент может быть послан импульс в фазосдвигающее устройство, которое, с этого момента начинает отсчет угла . Т.о. синхронизирующее устройство определяет момент естественной коммутации и в это время посылает сигнал в ФСУ. Недостатком синхронизирующих устройств, выполненных в виде трансформатора, является чувствительность параметров напряжений вторичных обмоток к амплитудным и фазовым искажениям питающей сети, а также к различного рода помехам, возникающим в ней при эксплуатации. Для устранения этих помех к СУ подключают различные фильтры, как пассивные, состоящие обычно из реактивных элементов, так и активные. Фазосдвигающее устройство (ФСУ). Назначение ФСУ в СИФУ ТП - регулирование фазы включающих импульсов тиристоров. Возможны различные принципы их реализации, но неизменным является то, что ФСУ осуществляет сдвиг импульса относительно момента естественной коммутации в сторону запаздывания на угол , величина которого регулируется в зависимости от значения управляющего напряжения UУ . Мы рассмотрим два принципа фазосмещения, нашедших распространение в реальных ТП. Один из них называется вертикальный, другой- интегральный принципы. 21 вопрос Способы реверса вентильных электроприводов. Односторонняя проводимость вентилей затрудняет реверс электропривода. В противоположность системе Г- Д, где непрерывным и плавным уменьшением возбуждения генератора можно сначала затормозить привод, переводя его в режим рекуперативного торможения, а затем, изменив полярность напряжения генератора разогнать двигатель в противоположном направлении, в вентильном приводе такой реверс выполнить сложнее. Проследим, как изменяется направление потока энергии в системе Г- Д. В исходном состоянии, когда осуществляется движение электропривода “вперед”, генератор постоянного тока является источником энергии (ЭДС и ток совпадают по направлению), а двигатель- приемником (ЭДС и ток направлены встречно). При плавном уменьшении возбуждения генератора его ЭДС снижается, становится меньше встречной ЭДС двигателя и ток якоря при этом изменяет свое направление на противоположное. Сейчас уже бывший двигатель стал источником энергии, а бывший генератор- приемником. Это энергия вращения маховых масс электропривода и механизма, претерпев ряд превращений из механической- в электрическую и обратно в виде электрической энергии переменного тока отдается в питающую сеть. Ключевой момент в этой цепи превращений энергии- изменение направления тока якоря. В системе Г- Д это происходит без затруднений. В системе ТП-Д это сопряжено с трудностями. Поэтому при необходимости осуществлять реверсирование схемы вентильного электропривода приходится усложнять. Схемы реверсивного вентильного электропривода можно разбить на две основные группы:
Первая группа схем реверсивного вентильного электропривода, имея одно достоинство- относительную дешевизну, т.к. здесь используется простой и дешевый однокомплектный вентильный преобразователь, тем не менее, не нашла такого широкого распространения, как вторая группа схем. Это обусловлено целым рядом существенных недостатков реверсивного электропривода с одним комплектом вентилей. Рассматривать подробно эти недостатки не имеет смысла, т.к. мы сосредоточим свое внимание на схемах бесконтактного реверса. Тем не менее можно отметить главные недостатки первой группы:
В соответствии с отмеченными достоинствами и недостатками схемы с переключениями в цепи возбуждения и в цепи якоря применяются для электроприводов небольшой и средней мощности со сравнительно небольшой частотой включений (до нескольких сот в час). 3.6.2.Бесконтактные реверсивные схемы с двухкомплектными ТП. В тех случаях, когда требуются предельно быстрые реверсы и большая частота последних и нужны плавные и быстрые переходы с высших скоростей на низшие, применяются не схемы с переключениями, а бесконтактные схемы с двумя группами вентилей в цепи якоря, каждая из которых предназначена для питания двигателя в одном направлении (реверсивные тиристорные преобразователи- РТП). РТП обеспечивают более плавный переход из двигательного режима в тормозной. Поэтому они применяются также и для нереверсивных электроприводов, если нагрузка имеет знакопеременный характер, а производственный механизм требует точного поддержания скорости. Схемы реверсивных вентильных электроприводов с двумя комплектами вентилей делятся на два основных класса:
В перекрестных схемах силовой трансформатор (Тр) имеет две изолированные группы вторичных обмоток, каждая из которых питает свою группу вентилей: ТПВ и ТПН. 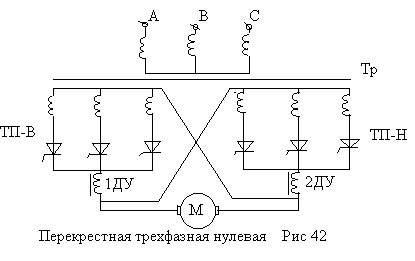 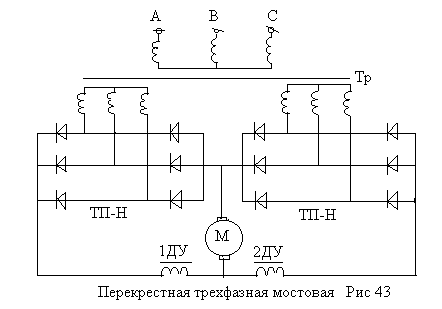 Для нулевых схем выпрямления (рис 42) группы вентилей ТПВ и ТПН соединены в виде “восьмерки”, а нагрузка включена между нулевыми точками вторичных обмоток трансформатора или, что то же самое, между катодами групп вентилей (на схеме- между внешними зажимами уравнительных дросселей 1ДУ и 2ДУ, которые в других схемах могут отсутствовать). В преобразователях с мостовыми схемами выпрямления (рис 43) нагрузка включается между общей точкой соединения уравнительных дросселей 1ДУ и 2ДУ и общей точкой соединения анодов группы ТПВ и катодов группы ТПН. Встречно-параллельные или противо-параллельные схемы (рис 44, 45) - имеют одну группу вторичных обмоток питающего трансформатора. При нулевых схемах выпрямления к каждой фазе трансформатора подключено по два встречно работающих вентиля, так что катод одного соединен с анодом другого. На стороне нагрузки для одного направления тока вместе соединены все катоды, а для другого направления тока- все аноды. Анодные (ТПН) и катодные (ТПВ) группы вентилей соединены между собой через два уравнительных дросселя. Нагрузка (т.е. якорь двигателя) подключена между нулевой точкой вторичной обмотки трансформатора и общей точкой уравнительных дросселей. При мостовых схемах выпрямления (рис...) якорь двигателя подключается между общими точками соединения уравнительных дросселей 1ДУ- 4ДУ и 2ДУ- 3ДУ. 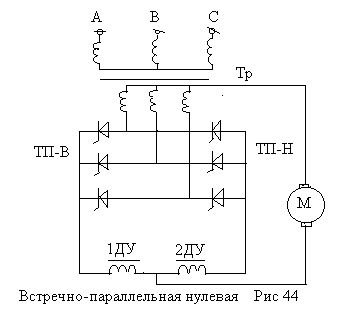 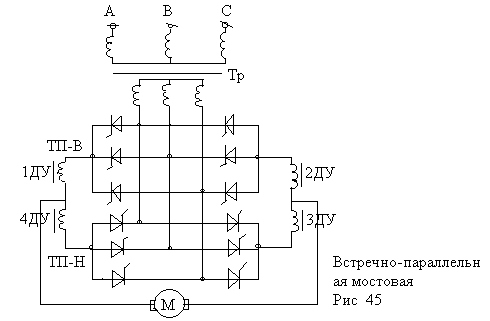 Сравнивая перекрестные и встречно- параллельные схемы, можно отметить достоинства и недостатки каждого из этих классов. Недостатком перекрестных схем является необходимость иметь более дорогой и хуже используемый трансформатор с двумя комплектами вторичных обмоток. Достоинство- меньшее число уравнительных дросселей в трехфазной мостовой схеме (наиболее распространенной в вентильном электроприводе) и меньшая их индуктивность. Во встречно- параллельных схемах размер и стоимость трансформатора меньше, т.к. требуется только одна вторичная обмотка. Более того, при применении противопараллельных схем можно вовсе обойтись без трансформатора, если уровень напряжения сети переменного тока соответствует потребной величине выпрямленного напряжения. Правда, в этом случае возможно превышение критического значения нарастания анодного тока в вентилях. Поэтому приходится устанавливать в двух фазах воздушные реакторы. Для их изготовления требуется большое количество меди, что, в какой-то степени, снижает преимущество этих схем. Недостатком встречно- параллельных схем являются большие значения переменной ЭДС в контуре уравнительного тока, из-за чего приходится увеличивать индуктивность уравнительных дросселей, и следовательно, габариты, массу и стоимость последних. В схемах с двумя комплектами вентилей при одном направлении вращения в выпрямительном режиме работает одна группа вентилей, а при противоположном- другая. При этом, в то время как одна группа вентилей работает в выпрямительном режиме, другая подготовлена к режиму инвертирования. Процесс реверса может проходить двумя разными способами:
22 вопрос 22. Совместное управление комплектами реверсивных ТП. Природа уравнительных токов. Системы с совместным управлением подразделяются на два типа:
В одноканальных системах имеется лишь один канал управления, по которому осуществляется одновременное воздействие на углы управления обеих вентильных групп. При этом обеспечивается однозначное жесткое соответствие между углами управления 1 и 2 групп, т.е. каждому значению угла управления первой группы 1 соответствует строго определенное значение угла управления другой группы 2. Соотношение между углами 1 и 2 определяется принятым законом согласования, характеристиками системы управления и ее настройкой. В двухканальных системах имеются два отдельных канала управления. Один из каналов воздействует на работающую группу вентилей и тем самым определяет основной режим работы электропривода. Второй канал управления воздействует на неработающую группу вентилей и служит для регулирования величины уравнительного тока. Поэтому двухканальные системы управления называют также системами с автоматическим регулированием уравнительного тока. Из-за равенства средних значений ЭДС выпрямительной и инверторной групп при линейном (симметричном) согласовании постоянная составляющая выпрямленной ЭДС в уравнительном контуре равна нулю. Однако, сумма мгновенных значений ЭДС в этом контуре не равна нулю и вызывает протекание уравнительного тока. Последний имеет пульсирующий характер. 23 вопрос Согласование статических характеристик реверсивных групп Линейное (симметричное) согласование. На практике довольно часто применяется так называемое линейное или симметричное согласование работы реверсивных групп в соответствии с законом: 1 + 2 = 180 или 1 = 2 (3-38) Здесь в соответствии с (3- 22) ЭДС выпрямительной группы равна ЭДС инверторной группы: Ed в = Ed и и постоянная составляющая выпрямленного напряжения в уравнительном контуре равна нулю. Из-за наличия падения напряжения в вентилях напряжения холостого хода выпрямителя UdВ и инвертора UdИ при данном способе согласования оказываются уже неравными: UdВ = Ed0 cos В - UВ < Ed0 cos и + UВ = UdИ (3- 39) Вследствие этого скорость идеального холостого хода в двигательном режиме х.х.дв оказывается меньше скорости идеального холостого хода в режиме рекуперативного торможения х.х.т : х.х.дв=UdВ / ce = (Ed0 cos В - UВ )/ce < (Ed0 cos и + UВ )/ce = UdИ / ce=х.х.т (3- 40) и механические характеристики привода имеют вид, показанный на рис 48: Из рассмотрения этого рисунка и из соотношения (3-40) следует, что при изменении знака момента нагрузки электродвигатель начнет развивать тормозной момент лишь после того, как его скорость после предшествующего двигательного режима возрастет на величину . = х.х.т - х.х.дв = 2UВ/ ce (3- 41) Таким образом, при переходе из двигательного режима в режим рекуперативного торможения будет иметь место скачок скорости, т.е. при линейном согласовании не обеспечивается безлюфтовое сопряжение характеристик. 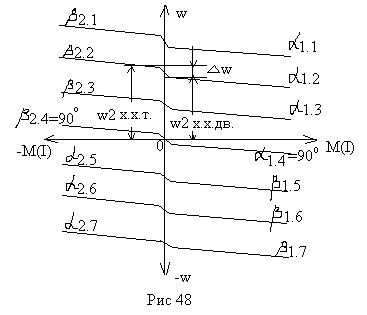 Величина изменения скорости, определяемая для электроприводов с разомкнутой системой управления выражением (3-41), прямо пропорциональна величине падения напряжения в вентилях. Для тиристоров это падение напряжения составляет всего 1-2 вольта. Поэтому в реверсивном тиристорном электроприводе при линейном согласовании характеристик вентильных групп изменения скорости оказываются небольшими. Т.е. данный способ обеспечивает согласование характеристик, близкое к безлюфтовому. В реальных установках с конечной величиной индуктивности в цепи выпрямленного тока (Lнагр ) при очень малых моментах на валу благодаря наличию уравнительных токов через якорь двигателя протекает знакопеременный прерывистый ток, и изменение скорости происходит не резким скачком, а в некотором конечном интервале изменения момента. Этот интервал соответствует области прерывистого тока якоря. Действительная скорость идеального холостого хода х.х при этом определяется средним значением между х.х дв и х.х т . В электроприводах с замкнутыми системами управления с обратной отрицательной связью по скорости и коэффициентом усиления, равным “к” изменение скорости при переходе из двигательного режима в тормозной будет в (1+к) раз меньше, т.е. для электропривода это изменение скорости будет совершенно незаметно. Линейное согласование вентильных групп в соответствии с соотношением (3-38) не представляет больших технических трудностей при его практической реализации. Это является одним из его достоинств. 24 вопрос Одноканальные и двухканальные системы регулирования тока при совместном управлении реверсивными ТП Сист. с совместным управлением подразделяются на два типа: 1.Сист. с одноканальным управлением, или сист. с жестким однозначным согласованием углов управления реверсивных групп 1 и 2; 2.Сист. с двухканальным управл-ем, или сист. с автоматич. регулир-ем уравнит. тока. В одноканальных сист. имеется лишь 1 канал управл-я, по которому осуществляется одновременное воздействие на углы управл-я обеих вентильных групп. При этом обеспечивается однозначное жесткое соответствие м/у углами управл-я 1 и 2 групп, т.е. каждому значению угла управл-я первой группы 1 соответствует строго определенное значение угла управл-я др. группы 2. Соотношение м/у углами 1 и 2 определяется принятым законом согласования, хар-ками сист. управл-я и ее настройкой. В двухканальных сист. имеются 2 отдельных канала управл-я. Один из каналов воздействует на работающую группу вентилей и тем самым определяет основной режим работы эл.привода. Второй канал управл-я воздействует на неработающую группу вентилей и служит для регулир-я вел-ны уравнит. тока. Поэтому двухканальные сист. управл-я называют также сист. с автоматич. регулированием уравнит. тока. «-» сист. с одноканальным управл-ем: вел-на уравнит. тока зависит от свойств системы. «+»:предельное быстродействие электропривода. «-» сист. с двухканальным управл-ем:большая сложность систем управления по сравнению с одноканальными системами. «+»:предельное быстродействие электропривода. При этом в отличие от одноканальных систем вел-на уравнит. тока ограничивается не только в установившихся режимах, но и во время переходных процессов. 25 вопрос 25. Раздельное управление реверсивными группами. Автоматический выбор работающей группы в зависимости от знака ошибки регулирования ( 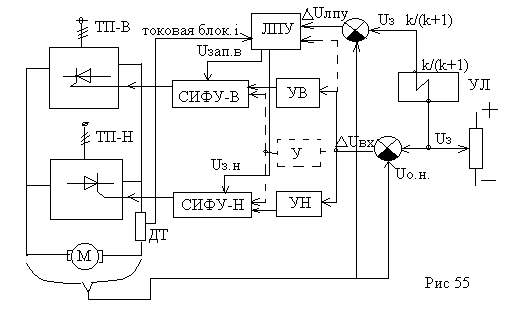 Структурная схема реверсивного вентильного электропривода с раздельным управлением приведена на рис 55: Наиболее эффективным способом ограничения уравнительного тока является раздельное управление вентильными группами. В электроприводах с раздельным управлением импульсы в любом режиме работы электропривода подаются только на одну группу вентилей реверсивного преобразователя, и ток протекает только через эту группу. Так как другая группа вентилей при этом заперта, то тем самым, полностью исключается возможность возникновения уравнительных токов, и в электроприводах с раздельным управлением не требуется установка уравнительных дросселей. Это позволяет значительно сократить объем реверсивного преобразователя и примерно в (24) раза его массу. Существуют несколько систем реализации раздельного управления вентильными группами. Среди них наибольшее применение находят два способа раздельного управления:
Б)На входы ЛПУ подаются два сигнала:
Uвх = Uз - Uо.н. (3-54) где: Uз - задающее напряжение. Оно задает направление вращения и уровень частоты вращения. Uо.н. - напряжение обратной связи, характеризующее действительное направление вращения и величину частоты вращения. Таблица 1. Состояние отдельных элементов реверсивного тиристорного ЭП для характерных режимов работы.
|