электротехника. 3 Нелинейные элементы. Характеристики. Нелинейные резистивные элементы
 Скачать 293.83 Kb. Скачать 293.83 Kb.
|

|
3.0. Нелинейные элементы. Характеристики. Нелинейные резистивные элементы Напомним, что нелинейными называются электрические цепи, у которых реакции и воздействие связаны нелинейными зависимостями. Подобные цепи содержат один или несколько приборов, замена которых линейными моделями приводит к недопустимому нарушению количественной и качественной картины колебаний в цепи.  Резистивными нелинейными цепями будем называть цепи, которые допустимо считать нелинейными безынерционными цепями. В соответствии с этим модель нелинейной резистивной цепи не содержит реактивных элементов. В нее входят хотя бы один нелинейный безынерционный резистивный двухполюсник или многополюсник, хотя бы один источник напряжения или тока и то или иное число резистивных сопротивлений. Для построения многих функциональных узлов аппаратуры связи используется большой класс нелинейных двухполюсных полупроводниковых и электронных приборов, называемых диодами. Единственной электрической характеристикой диода является его вольт-амперная характеристика (ВАХ) - зависимость постоянного тока в диоде от постоянного напряжения на его зажимах i = F(u) при согласном выборе положительных направлений напряжения и тока. Отличительные особенности вольт-амперных характеристик некоторых типов диодов различного назначения и их условные (схемные) обозначения приведены на рис. 10.1. Это характеристики полупроводниковых приборов: выпрямительного диода (рис. 10.1, а), стабилитрона (рис. 10.1, б), туннельного диода (рис. 10.1, в) и динистора (рис. 10.1, г). Характеристики рис. 10.1, а, б получили наименование однозначных, а рис. 10.1, в, г - многозначных, так как у них одному и тому же значению тока (рис. 10.1, в) или напряжения (рис. 10.1, г) соответствуют разные напряжения и токи.  Существуют и электронные приборы с подобными характеристиками. В последующем, простоты ради, нелинейные резистивные двухполюсники будем называть нелинейными резисторами. Схемное изображение нелинейного резистора приведено на рис. 10.2. Некоторые из нелинейных резисторов относятся к числу управляемых нелинейных элементов. Управляющей величиной может быть, например, внешняя температура, давление или освещенность. Свойства таких резисторов определяются не одной, а семейством ВАХ, каждая из которых соответствует различным значениям управляющей величины. Транзисторы, электронные лампы, тиристоры и некоторые другие полупроводниковые и электронные приборы могут рассматриваться как нелинейные резистивные четырехполюсники. Например, при включении транзистора рис. 10.3, а, являющегося трехполюсником, в электрическую цепь один из зажимов оказывается общим для пары входных и пары выходных зажимов транзистора. Поэтому транзистор принято рассматривать как четырехполюсник с двумя парами зажимов. На рис. 10.3, б показано такое включение транзистора по схеме с общим эмиттером.  Нелинейный четырехполюсник, как и линейный, описывается двумя уравнениями, которые связывают напряжения и токи на его входе и выходе. При анализе транзисторов часто используется следующая система уравнений: Для включения транзистора по схеме с общим эмиттером (рис. 10.3, б) u1 = uБЭ – напряжение между базой и эмиттером, i2 = iК – ток коллектора, i1 = iБ – ток базы и u2 = uКЭ – напряжение между коллектором и эмиттером. Уравнения (10.1) и (10.2) изображаются в виде графиков. Так u1 зависит от двух переменных i1 и u2 и, вообще говоря, его графическое изображение представляет собой поверхность в трехмерном пространстве. Так как начертить такую поверхность трудно, то функцию двух переменных изображают на плоскости в виде семейства характеристик: фиксируется одна переменная и непрерывно изменяется другая. Графическое изображение уравнений (10.1) и (10.2) для транзистора в схеме с общим эмиттером показано на рис. 10.3, в и г. Это так называемые входная и выходная вольт-амперные характеристики. Принято говорить, что ВАХ транзистора управляются током или напряжением. Так, выходная ВАХ транзистора в схеме с общим эмиттером управляется током базы. ВАХ нелинейных полупроводниковых и электронных приборов находятся, как правило, в результате измерений и приводятся в соответствующих справочниках в виде усредненных графических зависимостей. Необходимость усреднения связана с большим (до 30—50%) технологическим разбросом характеристик различных образцов прибора одного и того же типа. Эти характеристики являются статическими, т. е. характеристиками режима постоянного тока. Для резистивных нелинейных элементов (НЭ) важным параметром является их сопротивление, которое в отличие от линейных резисторов не является постоянным, а зависит от того, в какой точке ВАХ оно определяется. Различают два вида сопротивлений: статическое и дифференциальное (динамическое). Статическое сопротивление Rст определяется как (рис. 10.4)  где U0 – приложенное к НЭ постоянное напряжение; I0 – протекающий через НЭ постоянный ток. Это сопротивление постоянному току; оно характеризуется тангенсом угла наклона прямой, проходящей через начало координат и рабочую току (U0, I0) на ВАХ НЭ. В силу предположения о резистивном характере цепи статические характеристики определяют одновременно и соотношения между мгновенными значениями напряжений и токов на внешних зажимах соответствующего нелинейного прибора. Определим дифференциальное сопротивление Rд как отношение приращения напряжения Du к приращению тока Di при небольшом смещении рабочей точки на ВАХ под воздействием переменного напряжения малой амплитуды (рис. 10.4): Это сопротивление представляет собой сопротивление НЭ переменному току малой амплитуды. Обычно переходят к пределу этих приращений и определяют дифференциальное сопротивление в виде Оно характеризуется тангенсом угла наклона касательной к ВАХ в рабочей точке. Иногда удобно пользоваться понятием дифференциальной крутизны (имеющей смысл проводимости) Нелинейные индуктивные элементы Типичными динамическими нелинейными элементами электрической цепи являются катушки с сердечниками из ферромагнитных материалов – сплавов на основе металлов группы железа или их оксидов – ферритов. Нелинейность таких элементов обусловлена характеристикой намагничивания материала сердечника B(H). Поскольку в приближении теории магнитных цепей для замкнутого неразветвленного сердечника с постоянным сечением s и длиной l средней магнитной линии магнитный поток Ф пропорционален индукции B: Ф = Bs, а напряженность H связана с током i в обмотке, имеющей w витков, соотношением H = iw/l, то вид зависимости B(H) предопределяет характер вебер-амперной характеристики катушки Y(i) (Y = Фw – потокосцепление обмотки). Типичная вебер-амперная характеристика индуктивного элемента приведена на рис. 10.5, а. В общем случае вид ВАХ индуктивного элемента определяется многими факторами, и она часто является неоднозначной. Например, при циклическом намагничивании сердечника зависимость Y(i) имеет гистерезисный характер (рис. 10.5, б). В этом случае процесс перемагничивания сопровождается необратимыми потерями в сердечнике.  Нелинейный элемент индуктивности характеризуется согласно (1.8) статической индуктивностью Lст = Y/i и дифференциальной индуктивностью Lд = dY/di, которые зависят от намагничивающего тока i. Нелинейные емкостные элементы Нелинейные емкостные элементы могут служить моделями конденсаторов, диэлектрическая проницаемость e которых является функцией от напряженности электрического поля E в диэлектрике. Такие емкостные элементы описываются нелинейной вольт-кулоновой характеристикой – зависимостью заряда q от приложенного напряжения u. Подобными свойствами обладают, в частности, сегнетоэлектрики, вольт-амперные характеристики которых, аналогичны характеристикам ферромагнетиков (рис. 10.6, а); обратно смещенные p-n-переходы (рис. 10.6, б) и др.  Нелинейный элемент емкости характеризуется согласно (1.11) статической емкостью Сст = q/uс и дифференциальной емкостью Сд = dq/duс, которые зависят от приложенного напряжения uс. На рис. 10.6, в, г, показан характер изменения дифференциальной емкости для вольт-кулонных характеристик, изображенных на рис. 10.6, а и б, соответственно. 3.1. Параметры нелинейных элементов. Параметры нелинейного элемента в статическом и динамическом режимах. Физическая природа, типы и особенности ВАХ нелинейных элементов многообразны. Введем теперь численные показатели ВАХ, называемые параметрами нелинейных элементов. Соответственно двум режимам работы нелинейного элемента — статическому и динамическому — различают параметры статические и динамические, определяемые по-разному. Общим для тех и других является то, что они принадлежат данной рабочей точке ВАХ нелинейного элемента. При изменении положения рабочей точки на ВАХ величины параметров изменяются. Введем вначале статические параметры. Для неуправляемого нелинейного элемента их два: сопротивление постоянному току R0 и крутизна характеристики S0. Эти параметры являются взаимно обратными и определяются в данной рабочей точке как  Ч 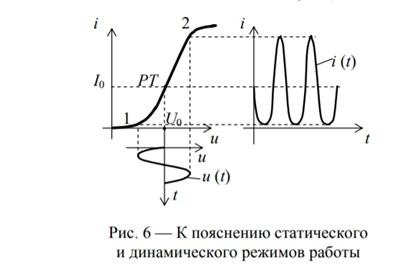 то касается величины R0, она измеряется в принятых единицах сопротивления, а крутизну, имеющую размерность проводимости, в практической радиотехнике принято выражать в миллиамперах на вольт (мА/В). Иллюстрацией к определению статических параметров может служить рисунок 6, где обозначены координаты некоторой рабочей точки U0 и I0. то касается величины R0, она измеряется в принятых единицах сопротивления, а крутизну, имеющую размерность проводимости, в практической радиотехнике принято выражать в миллиамперах на вольт (мА/В). Иллюстрацией к определению статических параметров может служить рисунок 6, где обозначены координаты некоторой рабочей точки U0 и I0. 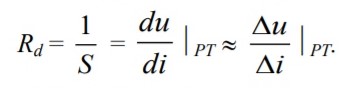 Для данной ВАХ при перемещении рабочей точки вниз R0 растет, при перемещении ее вверх R0 падает. Характерным свойством статических параметров является то, что они всегда положительны. Динамические параметры неуправляемого нелинейного элемента Rd и S также взаимно обратны и в данной рабочей точке определяются как отношение приращений напряжения и тока: Для данной ВАХ при перемещении рабочей точки вниз R0 растет, при перемещении ее вверх R0 падает. Характерным свойством статических параметров является то, что они всегда положительны. Динамические параметры неуправляемого нелинейного элемента Rd и S также взаимно обратны и в данной рабочей точке определяются как отношение приращений напряжения и тока: В 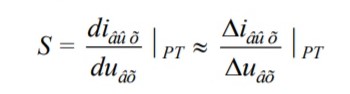 еличины этих параметров меняются в зависимости от положения рабочей точки на ВАХ нелинейного элемента. Для управляемых нелинейных элементов (электронная лампа, биполярный и полевой транзисторы и проч.) крутизну определяют по эффекту управления выходной величины величиной входной. Если выходной величиной является ток iвых, а входной — напряжение uвх (случай электронной лампы, полевого транзистора), то крутизну определяют как еличины этих параметров меняются в зависимости от положения рабочей точки на ВАХ нелинейного элемента. Для управляемых нелинейных элементов (электронная лампа, биполярный и полевой транзисторы и проч.) крутизну определяют по эффекту управления выходной величины величиной входной. Если выходной величиной является ток iвых, а входной — напряжение uвх (случай электронной лампы, полевого транзистора), то крутизну определяют как при фиксированном значении выходного напряжения. Значение крутизны может быть определено по любому из семейств характеристик для данного элемента. Умение определять статические и динамические параметры конкретных нелинейных элементов приобретается в ходе практики. Параметры нелинейных резисторов В зависимости от условий работы нелинейного резистора и характера задачи различают статическое, дифференциальное и динамическое сопротивления. Если нелинейный элемент является безынерционным, то он характеризуется первыми двумя из перечисленных параметров.  Статическое сопротивление равно отношению напряжения на резистивном элементе к протекающему через него току. В частности для точки 1 ВАХ на рис. 1  . .Под дифференциальным сопротивлением понимается отношение бесконечно малого приращения напряжения к соответствующему приращению тока Следует отметить, что у неуправляемого нелинейного резистора В случае инерционного нелинейного резистора вводится понятие динамического сопротивления определяемого по динамической ВАХ. В зависимости от скорости изменения переменной, например тока, может меняться не только величина, но и знак 3.2. Методы расчета нелинейных цепей. Методы расчета нелинейных электрических цепей постоянного тока Электрическое состояние нелинейных цепей описывается на основании законов Кирхгофа, которые имеют общий характер. При этом следует помнить, что для нелинейных цепей принцип наложения неприменим. В этой связи методы расчета, разработанные для линейных схем на основе законов Кирхгофа и принципа наложения, в общем случае не распространяются на нелинейные цепи. Общих методов расчета нелинейных цепей не существует. Известные приемы и способы имеют различные возможности и области применения. В общем случае при анализе нелинейной цепи описывающая ее система нелинейных уравнений может быть решена следующими методами: графическими; аналитическими; графо-аналитическими; итерационными. Графические методы расчета При использовании этих методов задача решается путем графических построений на плоскости. При этом характеристики всех ветвей цепи следует записать в функции одного общего аргумента. Благодаря этому система уравнений сводится к одному нелинейному уравнению с одним неизвестным. Формально при расчете различают цепи с последовательным, параллельным и смешанным соединениями. а) Цепи с последовательным соединением резистивных элементов. При последовательном соединении нелинейных резисторов в качестве общего аргумента принимается ток, протекающий через последовательно соединенные элементы. Расчет проводится в следующей последовательности. По заданным ВАХ Применение указанной методики иллюстрируют графические построения на рис. 2,б, соответствующие цепи на рис. 2,а.   Графическое решение для последовательной нелинейной цепи с двумя резистивными элементами может быть проведено и другим методом – методом пересечений. В этом случае один из нелинейных резисторов, например, с ВАХ Использование данного метода наиболее рационально при последовательном соединении линейного и нелинейного резисторов. В этом случае линейный резистор принимается за внутреннее сопротивление источника, и линейная ВАХ последнего строится по двум точкам. б) Цепи с параллельным соединением резистивных элементов. При параллельном соединении нелинейных резисторов в качестве общего аргумента принимается напряжение, приложенное к параллельно соединенным элементам. Расчет проводится в следующей последовательности. По заданным ВАХ Использование данной методики иллюстрируют графические построения на рис. 4,б, соответствующие цепи на рис. 4,а.  в) Цепи с последовательно-параллельным (смешанным) соединением резистивных элементов. 1. Расчет таких цепей производится в следующей последовательности: Исходная схема сводится к цепи с последовательным соединением резисторов, для чего строится результирующая ВАХ параллельно соединенных элементов, как это показано в пункте б). 2. Проводится расчет полученной схемы с последовательным соединением резистивных элементов (см. пункт а), на основании которого затем определяются токи в исходных параллельных ветвях. Метод двух узлов Для цепей, содержащих два узла или сводящихся к таковым, можно применять метод двух узлов. При полностью графическом способе реализации метода он заключается в следующем: Строятся графики зависимостей Определяется, в какой точке графически реализуется первый закон Кирхгофа Метод двух узлов может быть реализован и в другом варианте, отличающемся от изложенного выше меньшим числом графических построений. В качестве примера рассмотрим цепь на рис. 5. Для нее выражаем напряжения на резистивных элементах в функции
Далее задаемся током, протекающим через один из резисторов, например во второй ветви Таблица 1. Таблица результатов расчета методом двух узлов
Алгебраическая сумма токов в соответствии с первым законом Кирхгофа должна равнять нулю, поэтому получающаяся в последней колонке табл. 1 величина В осях 3.3. Нелинейные магнитные цепи с постоянной магнитодвижущей силой. В современной технике очень широко используются устройства для преобразования электрической энергии в механическую. Практически все они основаны на взаимодействии магнитных полей с электрическим током в проводниках. Не менее важную роль в технике играют устройства преобразования переменных напряжений и токов, основанные на явлении электромагнитной индукции, работа которых невозможна без формирования магнитного поля с определёнными параметрами. Поэтому наряду с процессами, связанными с движением зарядов в электрических цепях, необходимо анализировать процессы возбуждения и формирования магнитных полей. Совокупность технических устройств и объектов, возбуждающих магнитные поля и формирующих пути для их распространения, электромагнитные процессы в которых могут быть описаны с помощью понятий магнитодвижущей силы, магнитного потока и разности магнитных потенциалов называется магнитной цепью. 3.4. Законы магнитных цепей. Основные законы магнитных цепей Второй закон Кирхгофа для магнитной цепи или закон полного тока Если контур интегрирования охватывает W витков, то Закон Ома для участка магнитной цепи длиной ℓсри площадью S. При напряжении UMмежду концами участка связь электрической цепи, а магнитное напряжение – электрическому напряжению. Тогда магнитное сопротивление при расчете магнитных цепей возникают, как правило, две задачи — прямая и обратная. При прямой задаче обычно задаются геометрия цепи, материал и магнитный поток. Нужно определить магнитодвижущую силу. При обратной задаче задаются геометрия, материал и магнитодвижущая сила. Необходимо определить магнитный поток.   Прямая задача а) по заданному потоку Ф вычисляют магнитную индукцию б) по кривой намагничивания – напряженность магнитного тока B=f(H)  Обратная задача Обратная задачаа) по закону полного тока определяют напряженность магнитного поля Н = wI/ ℓср б) по кривой намагничивания находят магнитную индукцию; в) магнитный поток вычисляют по соотношению Ф= ВS 3.5. Катушка с ферромагнитным сердечником. Потери. Основой большинства электрических машин и аппаратов являются катушки с ферромагнитным сердечником (дроссель). Материал сердечника - электротехнические стали и другие ферромагнитные материалы (пермаллой, ферриты). Предположим, что катушка с ферромагнитным сердечником присоединена к источнику с напряжением и (рис. 29.1).  При протекании по обмотке тока i создается переменный магнитный поток, часть которого (Ф0) замыкается по сердечнику, а другая его часть (ФS) частично замыкается по воздуху. Поток Ф0 называется основным потоком, а поток ФS - поток рассеяния. При протекании по обмотке тока i создается переменный магнитный поток, часть которого (Ф0) замыкается по сердечнику, а другая его часть (ФS) частично замыкается по воздуху. Поток Ф0 называется основным потоком, а поток ФS - поток рассеяния.Основной поток наводит в обмотке ЭДС самоиндукции:  а поток рассеяния ЭДС рассеяния: а поток рассеяния ЭДС рассеяния:  Выберем на схеме положительные направления ЭДС e0 и eS. Если обозначить активное сопротивление обмотки через R, то, используя закон Ома для участка цепи можно написать: u + e0 + eS =iR; u = iR - e0 - eS = iR +  - полное уравнение электрического состояния обмотки. - полное уравнение электрического состояния обмотки.Или u = uа +u0 + uS. Катушка с ферромагнитным сердечником является нелинейным элементом, поэтому в общем случае, даже при синусоидальном напряжении u ,ток, магнитный поток и ЭДС являются величинами несинусоидальными. Применим метод эквивалентных синусоид, положив тем самым, что ток, магнитный поток и ЭДС являются величинами синусоидальными, а их действующие значения равны действующим значениям несинусоидальных величин. Это позволяет использовать векторные диаграммы и уравнения электрического состояния в комплексной форме. В  соответствии с этим уравнением катушку с ферромагнитным сердечником можно представить эквивалентной схемой (рис. 29.2), соответствии с этим уравнением катушку с ферромагнитным сердечником можно представить эквивалентной схемой (рис. 29.2),где R - активное сопротивление катушки, LS - индуктивность рассеяния. Сама катушка изображена обмоткой, помещенной на сердечнике и имеющей число витков w. Считается, что основной поток замыкается по сердечнику, а поток рассеяния отсутствует. Мощность, поступающая в цепь катушки, частично расходуется на нагрев проводов обмотки, а частично на перемагничивание сердечника (потери на гистерезис) и на нагрев сердечника (потери на вихревые токи). Все перечисленные потери являются активными.  Эквивалентная схема отражает этот процесс: активное сопротивление R характеризует потери в меди, а активные потери мощности в сердечнике (потери в стали) отражены ферромагнитным сердечником с идеальной обмоткой. Из-за активных потерь в сердечнике ток в идеальной катушке будет отставать от напряжения на зажимах этой катушки на угол j0. Векторная диаграмма идеальной катушки представлена на рис. 29.3. Разложим вектор тока на составляющие  Представим идеальную катушку эквивалентной схемой (рис. 29.4). Представим идеальную катушку эквивалентной схемой (рис. 29.4).Проводимость g0 характеризует активные потери в стали (на гистерезис и вихревые токи) Рст = U0Icos j0 = U0Ia = U02g0, а реактивная проводимость b0 - характеризует основной магнитный поток Ф0, замыкающийся по сердечнику и реактивную мощность Qст = U0Isin j0 = U0Ip = U02b0.
Таким образом, катушку с ферромагнитным сердечником можно представить в виде эквивалентной схемы, где все элементы являются линейными для мгновенных значений напряжения и тока (рис. 29.5). а) параллельная схема; б) последовательная схема. 3.6. Уравнение катушки. Эквивалентные схемы. Параметры и эквивалентные схемы катушек индуктивности и резисторов При низкой частоте, например при 50 Гц, эквивалентная схема катушки индуктивности (рис. 3.27, а) состоит из последовательно соединенных резистивного и индуктивного элементов (эту схему можно, конечно, заменить схемой, состоящей из параллельно соединенных активной и реактивной проводимостей). Из векторной диаграммы (рис. 3.27, б) следует, что Добротность катушки 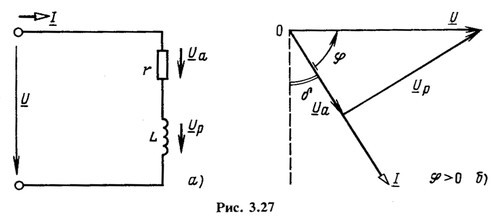 Сопротивление катушки увеличивается с ростом частоты вследствие поверхностного эффекта и главным образом - эффекта близости. Поэтому в общем случае добротность катушки не пропорциональна частоте. В некотором диапазоне изменения частот можно считать, что значение Q остается почти постоянным. 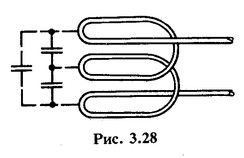 При высоких частотах нельзя пренебрегать емкостями между витками. Эти так называемые межвитковые емкости условно показаны на рис. 3.28 штриховой линией. Чем выше частота, тем меньше емкостные сопротивления между витками. Токи в витках катушки получаются неодинаковыми. Найти распределение тока в катушке при высокой частоте нелегко. При достаточно высоких частотах из-за межвитковых емкостей эквивалентное, реактивное сопротивление катушки может даже стать емкостным. При высоких частотах нельзя пренебрегать емкостями между витками. Эти так называемые межвитковые емкости условно показаны на рис. 3.28 штриховой линией. Чем выше частота, тем меньше емкостные сопротивления между витками. Токи в витках катушки получаются неодинаковыми. Найти распределение тока в катушке при высокой частоте нелегко. При достаточно высоких частотах из-за межвитковых емкостей эквивалентное, реактивное сопротивление катушки может даже стать емкостным.Применяемые на практике проволочные резисторы обладают всегда некоторой индуктивностью, и, кроме того, между отдельными витками имеется емкость. При достаточно низких частотах индуктивности и емкости практически никакого влияния не имеют и в расчетах не учитываются. На практике катушка индуктивности имеет последовательное сопротивление, созданное медной обмоткой самой катушки. Это последовательное сопротивление преобразует протекающий через катушку электрический ток в тепло, что приводит к потере качества индукции, то есть добротности. Добротность является отношением индуктивности к сопротивлению. Добротность катушки индуктивности может быть найдена через следующую формулу: где R является собственным сопротивлением обмотки. 3.7. Трансформатор. Уравнения. Трансформатор – это статическое электромагнитное устройство, предназначенное для преобразования электрической энергии одного напряжения в электрическую энергию другого напряжения. Такое преобразование необходимо во всех отраслях промышленности. В частности в энергетике применение трансформаторов обеспечивает основное преимущество электрической энергии – возможность передачи ее на большие расстояния с минимальными потерями. При передаче электроэнергии в линии электропередачи возникают потери энергии. Эти потери определяются током Iл в линии передачи и сопротивлением ее проводов Rл: ∆Pл = Iл 2 Rл . Мощность, передаваемая в линии передачи, определяется током и напряжением в ЛЭП: P = IлUл . (6.2) При относительно низком напряжении Uл ток в линии может быть весьма большим. Большой ток в проводах линии электропередачи в соответствии с (6.1) обусловливает значительные потери. Для уменьшении этих потерь при той же передаваемой мощности необходимо уменьшить ток в линии электропередачи. Для этого напряжение в ЛЭП должно быть повышено. Эта задача решается с помощью трансформатора. Поэтому силовые трансформаторы являются необходимым элементом промышленных электрических сетей. В начале линии передачи со стороны генератора устанавливается повышающий трансформатор, который увеличивает напряжение в десятки раз, а в конце ЛЭП со стороны потребителей устанавливается понижающий трансформатор, который уменьшает напряжение до номинального напряжения потребителя. В электротехнологии используются сварочные и печные трансформаторы. Печные трансформаторы обеспечивают напряжение, необходимое для питания электродуговых и индукционных печей; сварочный трансформатор создает напряжение, необходимое для горения электрической дуги в процессе электрической сварки. Кроме того, трансформаторы разных типов широко применяются в различных областях электротехники, электроники, электротехнологии, в устройствах измерения и контроля, автоматического управления и др. Трансформаторы разных типов имеет разные особенности конструкции и обладают разными характеристиками. Однако в основе работы всех трансформаторов лежит один принцип – индукционное действие магнитного поля (явление электромагнитной индукции). 3.8. Эквивалентная схема. |