Технологический процесс разработки лесосек с трелевочного тракто. 3 Технологии разработки лесосек на базе форвардеров и бензин моторных пил
 Скачать 1.88 Mb. Скачать 1.88 Mb.
|

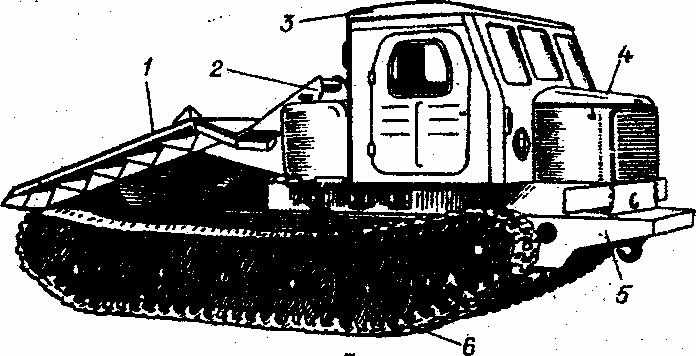 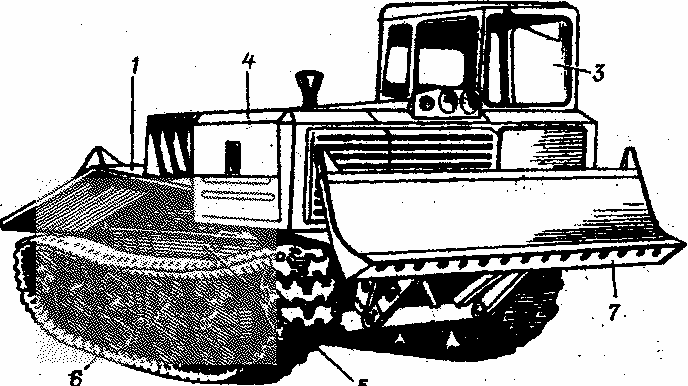 Рис.5 трелёвочные тракторы а – ТТ-4, б – ТДТ-55, 1-погрузочный щит, 2-лебёдка, 3-кабина, 4-двигатель, 5-рама, 6-ходовая система, 7-толкатель 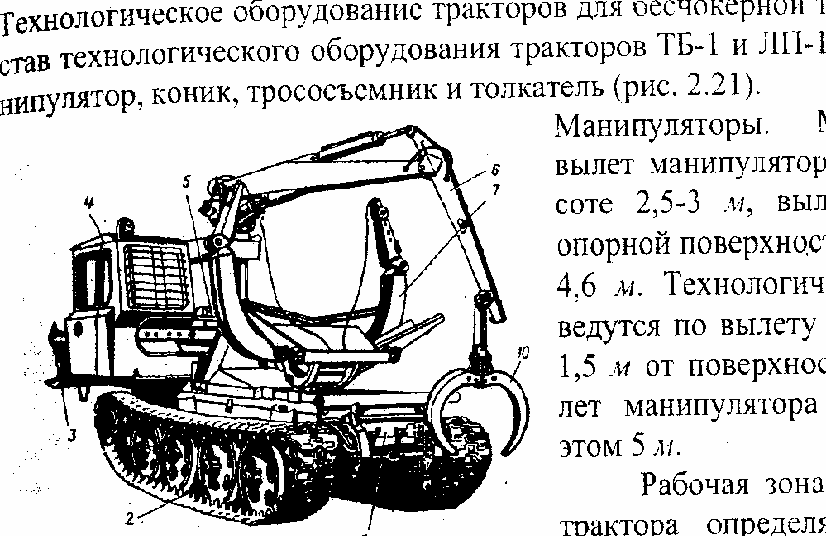 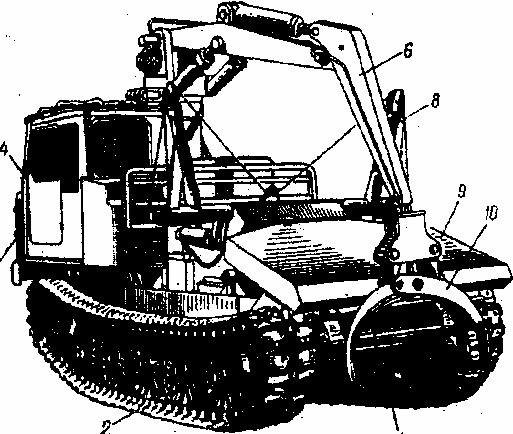 Рис.6 трелёвочные тракторы а – ТБ-1, б – ЛП-18А, 1-рама, 2- ходовая система, 3-толкатель, 4-кабина, 5-двигатель, 6- манипулятор, 7-коник, 8-трососъёмник, 9-щит, 10-захват К технологическому оборудованию также относятся бульдозерные толкатели, которые служат для выравнивания комлей, штабелёвки хлыстов или деревьев, сдвига пачек, расчичтки волоков. Техническая характеристика трелёвочных тракторов приведена в таблице 1 Табл.1
В состав технологического оборудования тракторов ТБ-1 и ЛП-18А входят манипулятор, коник, трососъёмник и толкатель (рис.6) Манипулятор. Максимальный вылет манипулятор имеет на высоте 2,5-3 м., вылет на уровне опорной поверхности гусениц 4,2-4,6 м. технологические расчёты ведутся по вылету на уровне 1,2-1,5 м. Высота манипулятора составит при этом 5 м. Рабочая зона манипулятора трактора определяется вылетом манипулятора и углом его поворота относительно вертикальной оси. Угол поворота манипулятора трактора ТБ-1 составляет 173º. Возможны два положения рабочей зоны, смещение зоны путём перестановки пальца рычага поворота. Трактор может взять дерево, комель которого находится в любой токе рабочей зоны. Однако не все точки равноценны. Важным условием правильного и производительного сбора деревьев манипулятором является выполнение приёмов в зоне обзорности, т.е. на той площади, которую тракторист видит со своего рабочего места. Зона обзорности не полностью может совпадать с рабочей зоной манипулятора. Трососъёмник. Увязка и удержание деревьев (хлыстов) на щите трактора ЛП-18А осуществляется трососъёмником. Перед погрузкой производится растяжка тросовой петли тросиками при выдвижении штоков гидроцилиндра трососъёмника. Затем включением гидроцилиндра трососъёмник наклоняется в сторону кабины трактора. После погрузки, т.е. укладки деревьев на трубу, трососъёмник поворачивается назад, как бы накидывая петлю на комли. Петля затягивается лебёдкой трактора. Трососъёмник не поворачивается вокруг вертикальной оси. Маневрирование трактора с пачкой осуществляется за счёт гибкости тросового крепления пачки. Для защиты заднего моста и плавной разгрузки пачки на трактора устанавливается щит. Пачковые захваты. В отличие от манипуляторов, которыми производится поштучная погрузка деревьев, пачковые захваты берут заранее сформированную пачку и делают это за один приём. Отличие от манипуляторных тракторов заключается ещё и в том, что погуженная пачка удерживается не в конике, а в самом захвате. Пачковый захват состоит из двух основных узлов – стрелы и собственно захвата. Параметры технологического оборудования трактора ЛТ-154 показаны на рис.7  Рис.7 параметры технологического оборудования трактора ТТ-4 Приёмы трелёвки. Технологический цикл трелёвки независимо от вида трактора, конструкции технологического оборудования и способа трелёвки в общем виде складывается из одних и тех же операций. Это порожний ход трактора, маневрирование и выбор позиции, погрузка или формирование пачки, грузовой ход, разгрузка. Порожний ход трактора. Для порожнего хода трактора технологическое оборудование приводится в транспортное положение. При этом технологическое оборудование должно занимать фиксированное положение узлов, исключающее раскачивание рукояти, захвата и других узлов, а также удары элементов оборудования друг о друга и о трактор. Должна быть исключена возможность самопроизвольного опускания, поворота, падения или выдвигания оборудования. Наконец, перевод оборудования из рабочего состояния в транспортное и обратно, должен производится за короткое время из кабины трактора с помощью органов управления. Трактор, работая в условиях лесосеки должен преодолевать различные препятствия, проходить по грунтам различного состава и влажности , вписываться в неровности микрорельефа и преодолевать их. Конструкция трелёвочных тракторов в максимальной степени учитывает особенности машин на лесосеке: тракторы имеют эластичную подвеску, высокий клиренс, узлы и механизмы их защищены от повреждений снизу. Тем не менее, вождение трактора по лесосеке требует соблюдения определённых правил. Во избежание поломок деталей ходовой части и рамы следует по возможности объезжать препятствия, которые встречаются на пути движения трактора. Преодолевать препятствия нужно на первой передаче, что позволяет уменьшить силу ударов при наезде на препятствия, а также создать достаточный крутящий момент для его преодоления. Валежник, поваленные деревья следует переезжать под прямым углом, а рвы и канавы под углом 15-20º. Наезжать на пень нужно так, чтобы гусеница прошла по пню серединой. Нельзя поворачивать трактор, когда гусеница находится на пне. Наиболее распространёнными последствиями неправильного наезда на пень и поворота трактора между пнями является спадание гусеницы, возможны также поломки ходовой части. Порожний ход трактора должен выполняться передним ходом, движение задним ходом с поворотом на 180º допускается на расстояние не более 50-70 м. Маневрирование и выбор позиции. Заключительным приёмом порожнего хода является маневрирование трактора у места погрузки или формирования пачки. В непосредственной близости от хлыстов или деревьев, которые необходимо трелевать, тракторист выбирает свободную позицию от хлыстов и пней и разворачивает трактор. Затем задним ходом подаётся к деревьям, хлысту и пачке, подлежащим трелёвке. Выбор позиции трактора у собираемых деревьев зависит от типа технологического оборудования и его рабочей зоны. Формирование пачки гидроманипулятором. После подъезда к деревьям и установки трактора в выбранной позиции тракторист вместе с сиденьем поворачивается назад, к рычагам управления технологическим оборудованием. Наводка манипулятора на дерево заключается в корректировке вылета манипулятора и угла его поворота. Для сокращения времени наводки рекомендуется совмещать приёмы. Использование пачковых захватов. При подъезде трактора ЛТ-154 к пачке на расстояние 5-8 м. его техническое оборудование переводится из транспортного состояния в рабочее. Для погрузки применяется приём подъезда трактора под пачку, который выполняется следующим образом: пачка стрелой поднимается вверх, одновременно подаётся назад под пачку. Погрузка пачки производится лебёдкой, щитом, стрелой. Пачка подтягивается тросом лебёдки, одновременно поднимается щит и стрела. По щиту перемещаются комли подтаскиваемые пачки. У стрелы при погрузке используется только нижняя часть – арка. С помощью арки пачка под действием тягового усилия каната приподнимаетсявверх. Формирование пачки чокерным оборудованием. Формирование пачки чокерным оборудованием производится в три приёма: оттаскивание каната, чокеровка и сбор пачки лебёдкой. Тяговый канат трелёвочного трактора оттаскивают двое рабочих. Чтобы облегчить оттаскивание каната с лебёдки, его разматывают двигателем. Затем чокеровщик протаскивает рабочий канат лебёдки через кольца чокеров заранее зачокерённых хлыстов или деревьев. Пропустив канат через все кольца чокеров, в петлю собирающего каната вставляется упорное разрезное кольцо. Приёмы чокеровки и формирования пачки показаны на рисунке 8. 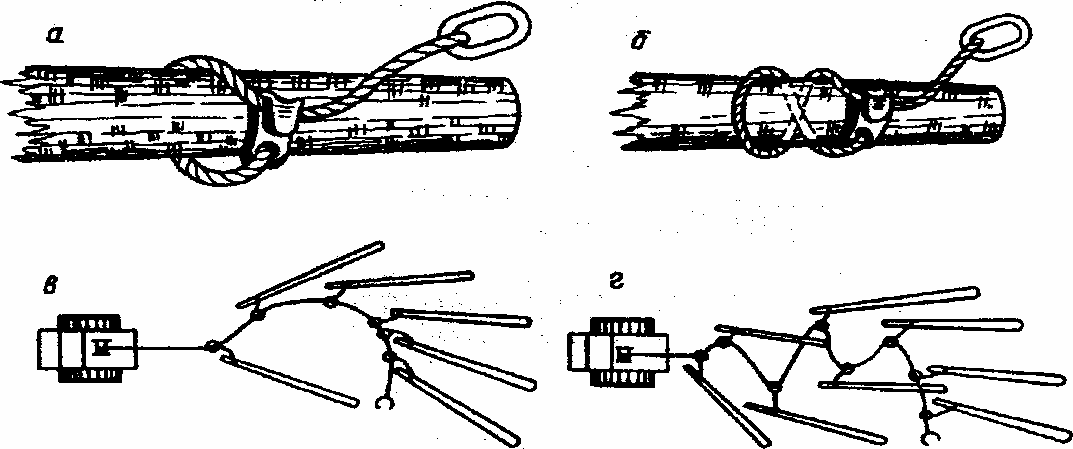 Рис.8 приёмы чокеровки и формирования пачки: а – чокеровка одинарной петлёй, б – чокеровка двойной петлёй, в – последовательная прицепка хлыстов, г – зигзагообразная прицепка хлыстов Грузовой ход трактора. Для движения с грузом трактор должен быть приведен в транспортное положение. Требования к транспортному положению в этом случае несколько другие, чем при порожнем ходе. Главным из них является обеспечение возможности маневрирования трактора под грузом. Для этого необходимо, чтобы трактор мог поворачиваться относительно пачки, как в горизонтальной так и в вертикальной плоскости. Все тракторы для бесчокерной трелёвки уступают по проходимости соответствующим бозавым тракторам с чокерным оборудованием, поскольку последние могут на особо тяжёлых участках волока сбросить пачку, переходит по волоку 10-20 м. вперёд, затем опускает щит, лебёдкой подтягивает пачку и снова берёт её. Разгрузка пачки. Для разгрузки пачки на погрузочной площадке следует подъезжать вплотную к штабелю и останавливать трактор так. Чтобы комли деревьев в пачке и штабеле находились на одном уровне. Затем раскрываются зажимные рычаги коника ТБ-1 и растягивается петля у трактора ЛП-18, коник или трососъёмник откидывается назад и трактор выезжает из под пачки. Для создания более плотных или более высоких штабелей разгрузка тракторов ТБ-1 или ЛП-18А может производится манипулятором. Разгрузка при чокерной трелёвке заключается в сбрасывании пачки м после этого – ручной отцепке каждого чокера. Для сбрасывания пачки лебёдка растормаживается, и трактор выезжает из-под пачки. Рейсовые нагрузки. В обычныз производительных условиях тяговые качества трелёвочных тракторов используются не полностью. Фактические рейсовые нагрузки за редким исключением оказываются нижетех, которые возможны по тяговым характеристикам трактора, т.е. ниже расчётных. Объёмы рейсовых нагрузок складываются под воздействием ряда технологических факторов. Под технологическими ограничениями рейсовых нагрузок понимается возможность или целесообразность формирования пачек определённого объёма. Трелёвочные тракторы с гидроманипулятором дают возможность варьировать объём пачки. Если ведётся набор пачки из отдельно лежащих деревьев, то возможным техническим ограничением является снижение маневренности трактора по мере увеличения нагрузки. При наборе деревьев из пачки, предварительно сформированной валочно-пакетирующей машиной, возможны два варианта. Когда пачки уложены в вал, манипуляторный трактор может взять только крайнюю пачку, которую при необходимости можно сдвоить. Если пачки под углом, то манипулятором можно сформировать пачку любого объёма, однако для этого требуется дополнительное маневрирование трактора. При чокерной рейсовые нагрузки ограничиваются ручными приёмами – растаскиванием тягового каната, чокеровкой, отцепкой. Для растаскивания каната требуются большие физические усилия, которые зависят от диаметра каната и расстояния оттаскивания. Указанное расстояние по этой причине не превышает 25 м. Объём пачки, которую можно собрать с некоторой площади вычисляется по формуле:  , , где q – средний запас древесины, м3/га  - длина площадки, м. - длина площадки, м. - ширина площадки, м. - ширина площадки, м.3.1. Технологии разработки лесосек на базе трелевочных тракторов и бензиномоторных пил При механизированном способе работ в зависимости от схем валки деревьев на пасеках возможны различные варианты технологий разработки лесосек, применяемые в разных природно-производственных условиях. Узкопасечная технология с трелевкой хлыстов за вершины на базе канатно-чокерных трелевочных тракторов приемлема для реализации всех видов рубок, преимущественно выборочных и сплошных рубках с сохранением подроста и второго яруса. Применение при разработке лесосеки метода узких пасек позволяет сохранить до 70% подроста на лесосеке. Делянка разбивается на пасеки (рис. 3.1, а), ширина пасек в пределах 25‑30 м. По середине пасеки прокладывается трелевочный волок шириной 5 м. Валку деревьев на волоке начинают с ближнего конца, деревья валят вершиной по направлению к лесопогрузочному пункту, после отхода вальщика на безопасное расстояние или перехода его на другой волок обрезают сучья и трелюют хлысты. Валка деревьев на полупасеках начинается с ближнего к лесопогрузочному пункту конца пасеки. Деревья валят вершинами по направлению к лесопогрузочному пункту таким образом, чтобы как можно большая часть кроны попала на волок, а угол между деревом и волоком был наименьшим (не более 30°). При валке деревьев учитывается расположение подроста, особенно куртин. После того как вальщик удалился на расстояние больше 50 м или после перехода его на другую пасеку, производят обрезку сучьев. Одновременно обрезчики сучьев оправляют подрост. Собирают сучья и оправляют подрост после трелевки хлыстов с данной площадки. Собранные сучья уплотняются при проходе трактора, трелюющего хлысты с более удаленных участков волока. Формирование трелюемой пачки производится путем вытягивания зачокерованных за вершину хлыстов сквозь подрост без их разворота, что предотвращает повреждение подроста. Трелевочный трактор не должен сходить с волока. Порожний трактор разворачивается на участке, где отсутствует подрост. Среднепасечная технология с трелевкой хлыстов за вершины на базе канатно-чокерных трелевочных тракторов приемлемадля реализации всех видов рубок с ограничением применения при выборочных и сплошных рубках с сохранением подроста и второго яруса в насаждениях с древостоями (обычно порослевыми), в которых деревья имеют сильный разносторонний наклон и эксцентричность крон, что мешает осуществлять их направленную валку. Данный способ работ можно использовать при разработке лесосек без сохранения подроста на грунтах с низкой несущей способностью. Делянка разбивается на пасеки (рис. 3.1, б), ширина пасек в пределах 30‑40 м. Полупасеки делят на ленты шириной 5‑10 м. В целях сохранения от повреждения подроста и оставляемых на корню деревьев, на поворотах пасечных и магистральных волоков оставляются отбойные деревья из числа назначенных в рубку, которые вырубаются после завершения лесосечных работ. Валка деревьев на волоке и полупасеках начинается с ближнего к лесопогрузочному пункту конца пасеки. Полупасеки (справа и слева от волока) разрабатывают в два захода. В первый заход валят деревья на ленте (шириной 5‑7 м), примыкающей к волоку, под острым углом (5‑20°) к нему. После трелевки хлыстов с первой ленты валят деревья на ленте, удаленной от волока, на изреженную часть пасеки в образовавшиеся просветы под углом 30‑45° к волоку. После валки деревьев на первой пасеке вальщик приступает к обрезке сучьев или переходит на следующую пасеку, разработка которой начинается с прорубки волока шириной 5 м. В это время на первой пасеке работают обрезчики сучьев, а трактор с канатно-чокерным оборудованием проводит трелевку за вершины хлыстов. Сучья обрезают на пасеках моторным инструментом и укладывают на волок, уплотняя в процессе трелевки. Порубочные остатки, находящиеся далее 5 метров от края волока, собирают в мелкие кучи в местах, свободных от подроста. |