ээ ответы. 31. Постоянные (цена деления) электроизмерительных приборов. Чувствительнось
 Скачать 0.53 Mb. Скачать 0.53 Mb.
|

|
46.Устройство и назначение синхронных машин. Синхронные машины используются в качестве генераторов, двигателей и синхронных компенсаторов. Устанавливаемые на тепловых электростанциях генераторы приводятся во вращение паровыми турбинами и называются турбогенераторами. Синхронные генераторы гидроэлектростанций вращаются с помощью гидротурбин и носят название гидрогенераторов. Кроме электростанций синхронные генераторы находят применение в установках, требующих автономного источника электроэнергии. Примером могут служить автомобильные электрические краны, на которых синхронные генераторы приводятся во вращение двигателями внутреннего сгорания. Синхронный компенсатор представляет собой машину, предназначенную для повышения коэффициента мощности электротехнических установок. Трехфазные синхронные генераторы, двигатели и синхронные компенсаторы имеют в принципе одинаковое устройство. Неподвижная часть машины, называемая статором (рис 11.1, а), состоит из стального или чугунного корпуса 1, в котором закреплен цилиндрический сердечник 2 статора. Для уменьшения потерь на перемагничивание и вихревые токи его набирают из листов электротехнической стали. В пазах сердечника статора уложена трехфазная обмотка 3, выполняемая так же, как и обмотка статора асинхронных двигателей. Сердечник статора в совокупности с обмоткой статора называется якорем машины. В подшипниковых щитах, прикрепленных с торцевых сторон к корпусу, либо в стояках, закрепленных на фундаменте, расположены подшипники, несущие вал 4 вращающейся части машины — ротора или индуктора. Синхронные генераторы гидроэлектростанций выполняют обычно с вертикальным расположением вала. На валу размещен цилиндрический сердечник 7 ротора, выполняемый из сплошной стали. В пазах сердечника ротора уложена обмотка возбуждения 8, питаемая постоянным током. Для присоединения обмотки возбуждения к внешней электрической цепи на валу укрепляют два изолированных друг от друга и от вала контактных кольца 6, к которым пружинами прижимаются неподвижные щетки 5. Обмотка 8 служит для возбуждения основного магнитного поля машины. 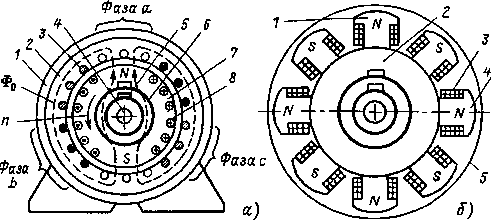 Рис. 11.1. Устройство синхронной машины с неявновыражен- ными полюсами (а) и ротора машины с явновыраженными полюсами (б) Питание обмотки возбуждения осуществляется от генератора постоянного тока (возбудителя), вал которого соединен с валом синхронной машины, от полупроводникового преобразователя переменного тока в постоянный либо от других источников постоянного тока. Мощность для питания обмотки возбуждения составляет 1 — 3 %мощности машины. На рис. 11.1, а показан разрез двухполюсной синхронной машины с неявновыраженными полюсами ротора. Такие машины изготовляют на частоты вращения 3000, 1500 и 1000 об/мин. Машины, предназначенные для работы с меньшими частотами вращения (750, 600, 500 об/мин и т. д.), имеют явновыраженные полюсы, число которых тем больше, чем меньше частота вращения. На рис. 11.1, б показано устройство ротора восьмиполюсной машины с явновыраженными полюсами. Ротор вписан в окружность 5, представляющую собой условно внутреннюю окружность сердечника статора. Явновыраженные полюсы 1 изготовляют из стальных листов или реже массивными и закрепляют на ободе 2 ротора. Обод ротора в совокупности с явновыраженными полюсами представляют собой сердечник ротора. Отдельные катушки обмотки возбуждения 3, расположенные на явновыраженных полюсах, соединены между собой так, что северные и южные полюсы чередуются. Трехфазная обмотка якоря синхронных машин выполняется таким образом, что возбуждаемое ею вращающееся магнитное поле имеет такое же число полюсов, как ротор. 47.Магнитотранзисторы и магнитотиристоры. 48.Машины постоянного тока. Назначение и устройство. Машины постоянного тока используют в качестве генераторов и двигателей. 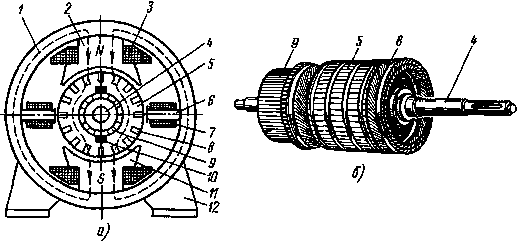 Электрическая энергия постоянного тока, вырабатываемая генераторами, служит для питания двигателей постоянного тока, электролитических ванн, электромагнитов различного назначения, аппаратуры управления и контроля и т. д. В настоящее время генераторы постоянного тока во многих установках заменяют полупроводниковыми преобразователями переменного тока в постоянный. Электрическая энергия постоянного тока, вырабатываемая генераторами, служит для питания двигателей постоянного тока, электролитических ванн, электромагнитов различного назначения, аппаратуры управления и контроля и т. д. В настоящее время генераторы постоянного тока во многих установках заменяют полупроводниковыми преобразователями переменного тока в постоянный.Двигатели постоянного тока применяют на транспорте для привода некоторых металлорежущих станков, прокатных станов, подъемно-транспортных машин, экскаваторов и т. д. Одной из главнейших причин применения двигателей постоянного тока вместо наиболее широко распространенных асинхронных двигателей является возможность плавного регулирования частоты вращения в широком диапазоне и получения желаемых механических характеристик n(М) . Рис. 9 1. Устройство (а) и якорь (б) машины постоянного тока Генераторы и двигатели постоянного тока устроены одинаково. Неподвижная часть машины, называемая статором (рис. 9.1, а), состоит из массивного стального корпуса 1, к которому прикреплены главные полюсы 2 и дополнительные полюсы 6. Исходя из технологических и других соображений главные полюсы изготовляют чаще из отдельных стальных листов; иногда их изготовляют сплошными. Из отдельных листов либо сплошными изготовляют и дополнительные полюсы. Перечисленные детали статора являются также и деталями его магнитопровода. На главных полюсах размещают катушки одной или нескольких обмоток возбуждения 3, на дополнительных полюсах — катушки 7 обмотки дополнительных полюсов. В подшипниковых щитах, прикрепленных с торцевых сторон к корпусу, расположены подшипники, несущие вал 4 вращающейся части машины, называемой якорем (рис. 9.1, а и б). На валу закреплен цилиндрический сердечник якоря 5, который для уменьшения потерь мощности от перемагничивания и вихревых токов набирают из стальных листов. В пазах, расположенных по поверхности якоря, уложена обмотка якоря 8. Так же, как обмотку возбуждения и обмотку дополнительных полюсов, ее изготовляют из медного изолированного провода. Выводы от обмотки якоря присоединяют к расположенному на валу коллектору 9. Последний представляет собой цилиндр, состоящий из медных пластин, изолированных друг от друга и от вала. К коллектору с помощью пружин прижимаются графитные, угольно-графитные или металлографитные щетки 10. Щетки расположены в специальных щеткодержателях. Обмотка возбуждения машины питается постоянным током и служит для создания основного магнитного поля, показанного на рис 9.1, а условно с помощью двух линий магнитной индукции, изображенных пунктиром. Главные полюсы имеют полюсные наконечники 11, служащие для получения по большей части окружности якоря одного и того же воздушного зазора между сердечником якоря и главными полюсами. Это необходимо для получения на большей части окружности якоря одной и той же магнитной индукции, а в проводниках обмотки якоря — постоянной по значению ЭДС. С помощью коллектора и щеток вращающаяся обмотка якоря соединяется с внешней электрической цепью На рис. 9.1, а показана машина постоянного тока с двумя главными полюсами. В зависимости от мощности и напряжения машины могут иметь и большее число полюсов. При этом соответственно увеличиваются число комплектов щеток и дополнительных полюсов. Крепление машины к фундаменту, специальным салазкам или металлоконструкции осуществляется с помощью лап 12. Корпус некоторых машин снабжается для крепления специальными фланцами. 49.Фототранзисторы. Основные схемы включения. Различают две основные схемы включения фототранзисторов: с отключенной базой и с присоединенной. В обеих преобразователь включается по схеме с общим эмиттером. В первой, являющейся наиболее простой, фототранзистор применяется как двухполюсник. Фотоприемник обладает, наибольшим усилением, но невысоким быстродействием и температурной стабильностью. Включение фототранзистора с присоединенной базой позволяет управлять положением рабочей точки, а также уменьшить темновой ток через коллекторный переход и повысить граничную частоту. Кроме того, фототранзистор может функционировать как фотодиод. Для этого обычно используют переход коллектор-база, площадь которого больше площади перехода эмиттер-база. В зависимости от напряжения, приложенного к переходу, получают фотодиодный или фотогальванический режимы работы. По сравнению с фотодиодами фототранзисторы редко используются для работы со слабыми сигналами, для прецизионных аналоговых измерений, а в случае приема модулированных сигналов строгие требования предъявляются к стабилизации рабочей точки. Напротив, достаточно высокое усиление фототока, в результате чего нередко отпадает необхрдимость в промежуточных усилителях, успешная работа с немодулированными сигналами, высокими уровнями излучения, схемотехническая гибкость предопределили широкое применение фототранзисторов в различных пороговых схемах автоматики, оптронах. л ж. Фототранзисторы могут непосредственно управлять работой маломощных электромеханических реле, тиристоров. Необходимым условием при построении таких схем является превышение тока коллектора, который устанавливается под действием на преобразователь лучистого потока, над порогом срабатывания ключевого элемента. Назначение диода — защита фотоприемника от индуцированной э.д.с. в момент запирания. Порог срабатывания тиристора устанавливается сопротивлением Ri. Конденсатор С препятствует отпиранию тиристора при кратковременных изменениях освещенности, скачках напряжения или тока в сети. При коммутации более мощных цепей, а также в фотореле с большей чувствительностью фототранзисторы нередко включают по схеме Дарлингтона. Общий коэффициент усиления первичного фототока схем равен произведению коэффициентов усиления фотоприемника и транзистора. Реле Р срабатывает при освещении фототранзисторов В схемах с тиристорами делители задают напряжение на коллекторах транзисторов, которое обычно значительно меньше величины напряжения Е. Фотореле срабатывает при засветке фототранзистора, а фотореле при его затемнении. Включение по схеме Дарлингтона применяется в составном фототранзисторе. В корпусе этого фотоприемника на одном кристалле кремния размещаются транзистор и фототранзистор, причем на последний с помощью линзы фокусируется световой поток. Аналогично фотодиодам фототранзисторы используются для управления работой усилительных каскадов на транзисторах. В зависимости от соотношения выходного сопротивления фотоприемника с входным сопротивлением усилителя может быть управление по току либо по напряжению. Выходной (коллекторный) ток фототранзи стора задает режим на базе транзистора. Резистор служит для ограничения тока через фотоприемник. Значение сопротивления выбирается так, чтобы ограничить мощность рассеивания, которая не должна превышать допустимой мощности рассеивания фототранзистора при работе с интенсивными засветками. Обычно сопротивление Ri значительно меньше сопротивления нагрузки. Выходное напряжение Схемы падает с ростом освещенности. Разброс параметров фотоприемников компенсируется регулировкой сопротивления. 50.Электропривод. Общие сведения. Электропривод определяется как электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением. В отдельных случаях в этой системе могут отсутствовать преобразовательное и передаточное устройства. Благодаря преимуществам по сравнению с другими видами приводов он нашел наибольшее распространение в промышленности и является основным средством механизации и автоматизации производственных машин и процессов. Степень совершенства электропривода определяет в конечном счете производительность труда. Электропривод – это управляемая электромеханическая система. Её назначение – преобразовывать электрическую энергию в механическую и обратно и управлять этим процессом. Электропривод имеет два канала – силовой и информационный (рис.1.1). По первому транспортируется преобразуемая энергия (широкие стрелки на рис. 1.1), по второму осуществляется управление потоком энергии, а также сбор и обработка сведений о состоянии и функционировании системы, диагностика ее неисправностей (тонкие стрелки на рис. 1.1).  Рис. 1.1. Общая структура электропривода Рис. 1.1. Общая структура электроприводаСиловой канал в свою очередь состоит из двух частей – электрической и механической и обязательно содержит связующее звено- электромеханический преобразователь. В электрическую часть силового канала входят устройства ЭП, передающие электрическую энергию от источника питания (шин промышленной электрической сети, автономного электрического генератора, аккумуляторной батареи и т.п.) к электромеханическому преобразователю ЭМП и обратно и осуществляющие, если это нужно, преобразование электрической энергии. Механическая часть состоит из подвижного органа электромеханического преобразователя, механических передач и исполнительного органа установки, в котором полезно реализуется механическая энергия. Электропривод взаимодействует с системой электроснабжения или источником электрической энергии, с одной стороны, с технологической установкой или машиной, с другой стороны, и наконец, через информационный преобразователь ИП с информационной системой более высокого уровня, часто с человеком – оператором, с третьей стороны (рис. 1.1). Можно считать, что электропривод как подсистема входит в указанные системы, являясь их частью. Действительно, специалиста по электроснабжению электропривод обычно интересует как потребитель электроэнергии, технолога или конструктора машин – как источник механической энергии, инженера, разрабатывающего или эксплуатирующего АСУ, – как развитый интерфейс, связывающий его систему с технологическим процессом или системой электроснабжения. Практически все процессы, связанные с механической энергией, движением, осуществляются электроприводом. Исключение составляют лишь автономные транспортные средства (автомобили, самолеты, некоторые виды подвижного состава, судов), использующие неэлектрические двигатели. В относительно небольшом числе промышленных установок используется гидропривод, еще реже – пневмопривод. Столь широкое, практически повсеместное распространение электропривода обусловлено особенностями электрической энергии – возможностью передвигать ее на любые расстояния, постоянной готовностью к использованию, легкостью превращения в любые другие виды энергии. Сегодня в приборных системах используются электроприводы, мощность которых составляет единицы микроватт; мощность электропривода компрессора на перекачивающей газ станции – десятки мегаватт, т.е. диапазон современных электроприводов по мощности превышает 1012. Такого же порядка и диапазон по частоте вращения: в установке, где вытягиваются кристаллы полупроводников, вал двигателя должен делать 1 оборот в несколько десятков часов при очень жестких требованиях к равномерности движения; частота вращения шлифовального круга в современном хорошем станке может достигать 150000 об/мин. Но особенно широк – безгранично широк – диапазон применений современного электропривода: от искусственного сердца до шагающего экскаватора, от вентилятора до антенны радиотелескопа, от стиральной машины до гибкой производственной системы. Именно эта особенность – теснейшее взаимодействие с технологической сферой – оказывала и оказывает на электропривод мощное стимулирующее влияние. Непрерывно растущие требования со стороны технологических установок определяют развитие электропривода, совершенствование его элементарной базы, его методологии. В свою очередь, развивающийся электропривод положительно влияет на технологическую сферу, обеспечивает новые, недоступные ранее возможности. С энергетической точки зрения электропривод – главный потребитель электрической энергии: сегодня в развитых странах он потребляет более 60% всей производимой электроэнергии. В условиях дефицита энергетических ресурсов это делает особенно острой проблему энергосбережения в электроприводе и средствами электропривода. Специалисты считают, что сегодня сэкономить единицу энергетических ресурсов, например 1т условного топлива, вдвое дешевле, чем ее добыть. Нетрудно видеть. что в перспективе это соотношение будет изменяться: добывать топливо становится всё труднее, а запасы его всё убывают. Рассмотрим основные функциональные элементы электропривода: 1) Регуляторы (Р) — нужен для управления процессами и работой электропривода 2) Электрический преобразователь (ЭП) преобразует один тип тока в другой 3) Электромеханический преобразователь (ЭМП) — принцип обычного электродвигателя 4) Механический преобразователь (МП) изменяет скорость вращения двигателя 5) Управление — управляющие воздействие 6) ИО — конечный исполнительный орган (часть) К функциональным частям можно отнести: 1) Электропривод или силовая часть с разомкнутой системой управления 2) Механическая часть 3) Система управления электрического привода Разновидности электрических приводов: нерегулируемые, регулируемые, неавтоматизированные, автоматизированные, линейные, вращательные. Качество функционирования электрического привода во многом характеризуется верным выбором применяемого электродвигателя, что обеспечивает надёжную работу электрического привода и довольно высокую рабочую эффективность всех технологических и производственных процессов на транспорте, в существующей промышленности, в строительстве и т.д 51.Тензоэлектрические полупроводниковые приборы. Полупроводниковые тензоэлектрические приборы (тензоприборы) служат для измерения давлений и деформаций. Тензорезисторы основаны на тензорезистивном эффекте, который состоит в том, что сопротивление полупроводника зависит от давления на полупроводник. Материалом для тензорезисторов чаще всего служит кремний, но могут быть и использованы другие полупроводники. К основным параметрам тензорезисторов относятся номинальное сопротивление (от десятков ом до десятков килоом), т.е. сопротивление при отсутствии давления, и коэффициент тензочувствительности, равный отношению относительного изменения сопротивления R/R к относительному изменению длины тензорезистора l/l. Этот коэффициент зависит от вещества полупроводника, типа электропроводимости, удельного сопротивления и направления деформации. У полупроводников n - типа коэффициент тензочувствительности отрицательный, т.е. при возрастании давления сопротивление уменьшается, а у полупроводников p - типа - положительный. Практически этот коэффициент может доходить до сотен со знаком или . Тензорезисторы характеризуются ещё предельной допустимой деформацией, которую нельзя превышать во избежание выхода прибора из строя. Помимо кристаллических тензорезисторов - из кристаллического полупроводника n- или p- типа - могу быть поликристаллические тензорезисторы, у которых при деформации сопротивление дополнительно изменяется за счёт изменения сопротивления контактов между отдельными кристалликами. Полупроводниковые тензодиды работают по принципу изменения вольтамперной характеристики под действием давления. Это изменение связанно с тем, что при деформации изменяется высота потенциального барьера в p - n - переходе. Коэффициент тензочувствительности у тензодиодов достигает сотен и даже тысяч. Он может быть ещё выше у туннельных диодов. У тензотранзисторов также под действием давления изменяется вольт-амперная характеристика. В зависимости от того, к какой области приложено давление, при его возрастании может наблюдаться уменьшение или увеличение тока. В тензотеристорах с увеличением давления на базовый электрод, играющий роль управляющего электрода, возрастает ток эмиттера и за счёт этого понижается напряжение включения. |