пример 24. А допустимого нагрева двигателя при работе
 Скачать 374.5 Kb. Скачать 374.5 Kb.
|

|
Задание: 1. На основании исходных данных построить нагрузочную диаграмму электродвигателя привода, рассчитать на ее основании эквивалентную (среднеквадратическую) нагрузку и нанести ее на нагрузочную диаграмму. 2. Используя нагрузочную диаграмму электропривода, определить необходимую мощность двигателя из условия обеспечения: а) допустимого нагрева двигателя при работе; б) пуска с мощностью при пуске, составляющей 25% эквивалентной за период работы, и снижением напряжения при пуске на ΔU%; в) статической устойчивости электропривода при возможном снижении напряжения при максимальной нагрузке на ΔU%/2. 3. Выбрать в качестве приводного двигателя асинхронный с короткозамкнутым ротором общего назначения с синхронной частотой вращения 1500об/мин и проверить правильность выбора мощности по нагреву методом средних потерь. 4. Для первого цикла нагрузочной диаграммы рассчитать и построить кривую изменения превышения температуры двигателя при работе и после отключения, совместив ее с нагрузочной диаграммой. Температуру двигателя до его включения принять равной температуре окружающей среды. 5. Вычертить согласно заданию принципиальную электрическую схему автоматического управления электроприводом. Предусмотреть автоматическую защиту электродвигателя привода от токов короткого замыкания и перегрузки, а цепей управления – от токов короткого замыкания. Выбрать соответствующую аппаратуру и кратко изложить ее назначение и работу схемы управления. Исходные данные:
t0 = 60 мин, Принципиальная электрическая схема ЭП – Реверсивный ЭП с торможением противовключением. Решение 1. Построим нагрузочную диаграмму электропривода (Рисунок 1).  Рисунок 1. Нагрузочная диаграмма электродвигателя На основании диаграммы (Рисунок 1) определим эквивалентную постоянную мощность нагрузки в течении продолжительности работы электропривода по следующей формуле:  (1) (1)где Подставляя численные значения в формулу (1): 2.а) Номинальная мощность где Коэффициент механической перегрузки где  (4) (4)tp=t1+t2+t3+t4=14+28+8+32=82 мин - продолжительность работы двигателя с нагрузкой; t0 - продолжительность отключения двигателя до следующего включения, примем этот параметр равному продолжительности работы; Подставляя исходные данные в формулы (2) – (4) получим следующие выражения: 2.б) Необходимая мощность асинхронного двигателя привода для обеспечения пуска рассчитывается по формуле: где Подставляя найденные значения в выражения (5) получим: 2.в) Требуемая мощность асинхронного двигателя привода для обеспечения его устойчивой работы при максимальной нагрузке на валу где Подставляя найденные значения в выражения (6) получим: 3. Номинальная мощность выбираемого согласно заданию асинхронного двигателя серии 4А с синхронной частотой вращения 1500об/мин должна быть достаточной, чтобы обеспечивалось выполнение условий (2), (5) и (6). То есть, принимается по каталогу двигатель с номинальной мощностью равной или ближайшей большей к полученной максимальной расчетной мощности. Согласно полученной эквивалентной мощности из Приложения выбираем подходящий асинхронный электродвигатель серии 4А с характеристиками сведенными в Таблица 1. Таблица 1. Технические данные трехфазных асинхронных двигателей серии 4А основного исполнения (УЗ) с синхронной частотой вращения n=1500 об/мин и напряжением питания 380/220 В.
Окончательно правильность выбора мощности электродвигателя привода проверяется методом средних потерь. Для правильного выбранного двигателя должно обеспечиваться выполнение условие: где где Средние потери мощности в двигателе равны: где Потери мощности  (11) (11)где а – отношение постоянных потерь мощности в двигателе к переменным. Для асинхронных двигателей общего назначения принять а=0,6; При холостом ходе двигателя ( Результаты расчета частичных КПД и потерь мощности по участкам нагрузочной диаграммы сведем в таблицу 2. Таблица 2. Результаты расчетом частичных КПД и потери мощности по участкам
По данным таблицы 2 можно определить средние потери мощности в двигателе: Далее определим уточненное значение постоянной времени нагрева: Согласно полученному значению постоянной времени нагрева пересчитаем значение коэффициента тепловой перегрузки: Для правильного выбранного двигателя должно обеспечиваться выполнение условие: как видно условие выполняется, следовательно, двигатель выбран верно. 4. Расчет превышения температуры где для каждого отдельно взятого i-го участка: Необходимое значение теплоотдачи При работе по (13) кривой При отключении двигателя потери мощности в нем прекратятся. Тогда согласно (14) где Подставляя численные значения получим по (15) необходимое значение теплоотдачи двигателя при работе: Значение начальных и установившихся превышений температуры сведены в таблицу (Таблица 3). Таблица 3. Значения начальных и установившихся прерываний температуры
5. Принципиальная электрическая схема автоматического управления, электроприводом рассчитанной номинальной мощности показан на рис.2. 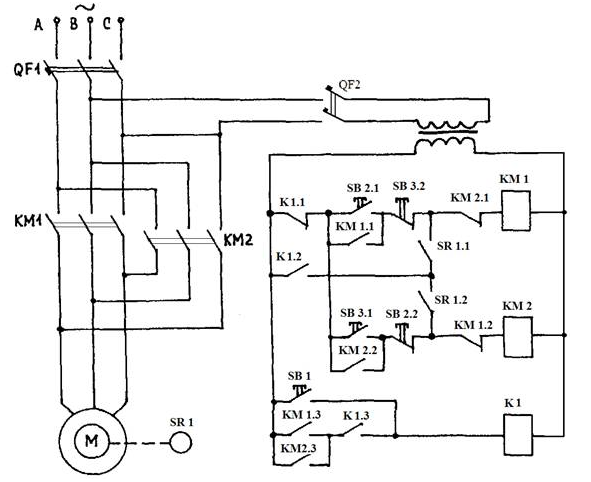 Рисунок 2. Схема реверсивного асинхронного электропривода с торможением противовключением Когда по условиям технологического процесса необходимо значительно ускорить процесс торможения, то применяют торможение противовключением. Схема реверсивного асинхронного электропривода, в которой реализуется торможение противовключением, приведена на рис. 2. Схема (рис. 2) позволяет осуществлять прямой пуск, реверс и остановку электропривода торможением противовключением с контролем по скорости. При этом в качестве чувствительного элемента используется электромеханическое реле контроля скорости SR1, устанавливаемое на валу электродвигателя. Оно замыкает свои контакты SR 1.1 или SR 1.2 при скорости wSR ≥ 0,01 wН . Управляющие команды подаются в схему кнопками управления SB2.1 («Вперёд»), SBЗ.1 («Назад») и SB1 («Стоп») в зависимости от требуемого по технологии направления вращения. Напряжение на обмотку статора подаётся контакторами КМ1 – чередованием фаз АВС и КМ2 – чередование фаз СВА. Кнопка остановки электропривода SB1 («Стоп») включена в цепь катушки реле торможения К1, которое организует режим торможения противовключением при любом направлении вращения. В цепях катушек контакторов КМ1 и КМ2 находятся блокировочные контакты SBЗ.2, КМ2.1 и SB2.2, КМ1.2, предотвращающие одновременное включение этих контакторов. Управление электроприводом осуществляется следующим образом. При нажатии кнопки SB2 образуется цепь питания катушки КМ1, контактор КМ1 срабатывает и подключает статорную обмотку асинхронного электродвигателя к питающей сети. При разгоне электродвигателя срабатывает реле контроля скорости и замыкает свой контакт SR1.2, подготавливая схему к остановке электропривода, если будет нажата кнопка SB1 ("Стоп"). Для реверсирования электропривода нужно нажать кнопку SBЗ. После этого размыкается блокирующий контакт SВЗ.2 в цепи катушки КМ 1. Контактор КМ 1 отключает статор двигателя от питающей сети. Одновременно в цепи катушки КМ2 замыкается блокирующий контакт КМ1.2. Катушка КМ2 получает питание, и контактор КМ2 подключает статорную обмотку к питающей сети, при этом изменяя чередование фаз. Магнитное поле электродвигателя начинает вращаться в противоположном направлении, а ротор по инерции вращается в прежнем направлении. Поэтому асинхронный двигатель переходит в режим торможения противовключением до полной остановки, а затем разгоняется в направлении «Назад». При разгоне в направлении «Назад» реле контроля скорости замыкает свой контакт SR1.1, подготавливая схему к остановке. Для останова привода при нажатии кнопки SB1 катушка реле торможения К1 получает питание и реле К1 включается. Контактор КМ2 теряет питание и отключает статорную обмотку от питающей сети. При этом контактор КМ2 замыкает свой блокировочный контакт КМ2.1 в цепи катушки КМ1, контактор КМ1 включается (через цепь К1.2 и SR1.1). Статорная обмотка подключается с прямым чередованием фаз «Вперёд», а ротор вращается по инерции в направлении «Назад». Поэтому асинхронный двигатель переходит в режим торможения противовключением. Когда скорость снизится практически до нуля, реле контроля скорости SR1 разомкнёт свой контакт SR1.1 и катушка КМ1 потеряет питание, а контактор КМ1 отключит статорную обмотку от питающей сети. Основным элементом этой схемы является реверсивный магнитный пускатель, который включает в себя два электромагнитных контактора КМ1 и КМ2, реле торможения К1 (рис. 2) и кнопок управления SB1- SB3. Схема обеспечивает прямой пуск и реверс АД, а также торможение противовключением при ручном управлении. Пуск двигателя в условном направлении «Вперед» осуществляется нажатием кнопки SB2 при включенном автоматическом выключателе QF. Катушка контактора КМ1 получит питание через размыкающую кнопку остановки SB3, замыкающую кнопку SB1, размыкающие контакты КМ2 (они будут замкнуты при обесточенном состоянии катушки КМ2). Если предположить, что при одновременном нажатии кнопок SB2 и SB3 замкнутся силовые контакты КМ1 и КМ2, то произойдет короткое замыкание токоподводящими проводами. Во избежание этого в схеме используется типовая электрическая блокировка. Она предусматривает перекрестное включение размыкающих контактов аппарата КМ1 в цепь катушки аппарата КМ2 и наоборот. Кроме электрической блокировки может быть использована специальная механическая блокировка. Она представляет собой рычажную систему, которая предотвращает втягивание одного контактора, если включен другой. Защиту от коротких замыканий обеспечивает автоматический выключатель QF. Его наличие исключает также возможность работы привода при обрыве одной фазы. При выборе аппаратуры защиты и управления принимается, что сеть, к которой подключается асинхронный электропривод, переменного тока, трехфазная, напряжением 380/220 В и частотой 50Гц. Для выбора автоматического выключателя QF асинхронного короткозамкнутого электродвигателя 4A132S4 мощностью 1. Определяем величину номинального тока двигателя 2. Ток уставки теплового расцепителя составляет: 3. Ток уставки электромагнитного расцепителя: 4. Выбираем по техническим данным стандартный автоматический выключатель ВА 5139 400А с номинальным током магнитного расцепителя 400А. Для выбора контакторов переменного тока КМ1 и КМ2: 1. По определенному номинальному току электродвигателя определим пусковой ток: 2. По пусковому току двигателя и техническим данным выбираем стандартный контактор Tesys LC1F 250А 3п 380 В с номинальным током магнитного расцепителя 200А. Для выбора предохранителей для цепей защиты FU1 и FU2: 1. По определенному номинальному току электродвигателя определим пусковой ток: 2. Расчетный ток плавкой вставки: 3. Из справочника выбираем предохранитель ПН-2-200 с номинальным током 200 А. Список литературы
|