Основы дискретно логических систем управления ТП. Фильтрация с 124. Алгоритмы первичной обработки информации в асутп
 Скачать 0.75 Mb. Скачать 0.75 Mb.
|

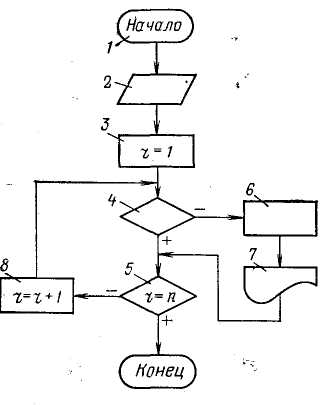 Рис. 3.11. Блок-схема алгоритма допус-кового контроля достоверности исходной информации быть использовано предыдущее достоверное значение этого параметра или его значение, усредненное за некоторый интервал времени, предшествующий моменту обнаружения отказа ИИК. Последний способ применяют для наиболее ответственных параметров, например, расходов, значения которых используют при расчете ТЭП. Алгоритм допускового контроля параметра. Он основан на том, что при работе объекта значения каждого из контролируемых технологических параметров дс,- не могут выходить за определенные границы: Соответственно при исправном ИИК должен быть ограничен и сигнал измерительной информации г/,, поступающий в УВМ по этому каналу: Контроль достоверности по этому алгоритму заключается в проверке выполнения условия (3.61) для каждого значения сигнала измерительной информации, поступившего при очередном опросе ИИК. Блок-схема алгоритма представлена на рис. 3.11. Он работает следующим образом. После инициации работы алгоритма (блок /) и ввода исходных данных (блок 2) организуется цикл проверки ИИК, каждому из которых присвоен свой номер г (блок 3); в блоке 4 проверяется условие (3.61), при выполнении которого проверяется условие окончания работы алгоритма (блок 5). Выполнение условия г = п (где п — число контролируемых ИИК) останавливает работу алгоритма. Если это условие не выполняется, счетчик номера ИИК увеличивается на 1 (блок 8), и цикл повторяется. Если при проверке в блоке 4 условие (3.61) не выполняется, то в блоке 6 недостоверное значение yr (jt0) заменяется достоверным значением yj[(j—1)^0] того же сигнала, полученным в предыдущем цикле опроса ИИК. Затем на печать выводится сообщение о том, что обнаружен отказ t-того ИИК (блок 7), и работу алгоритма продолжает блок 5. Этот алгоритм применим не только для стационарных процессов, но и для нестационарных, например периодических. В этом случае граничные значения у,* и у,* в условии (3.61) являются не константами, а функциями времени, отсчитываемого от начала процесса. Алгоритм допускового контроля скорости изменения сигнала измерительной информации основан на том, что скорость изменения любого технологического параметра хг ограничена условием где о)с—частота среза функции xr(t)\ x, — среднее значение этой функции. Соответственно должна быть ограничена и скорость изменения сигнала измерительной информации yr(t) Контроль достоверности по данному алгоритму заключается в проверке выполнения условия (3.63), причем оценку производной dyijdt рассчитывают по формуле Контроль достоверности исходной информации по условиям (3.61) и (3.63) часто совмещается. Тогда в блок-схему алгоритма на рис. 3.11 между блоками 4 и 5 вводится еще один блок, осуществляющий проверку выполнения условия (3.63). При нарушении этого условия инициируется блок 6. Алгоритмы контроля достоверности исходной информации, е помощью которых выявляются частичные отказы ИИК, основаны на использовании информационной избыточности, которая всегда имеется в АСУТП. Избыточность прежде всего может быть создана искусственно при проектировании АСУТП за счет ап-' паратурной избыточности, например резервирования ИИК для контроля наиболее важных технологических параметров. Другой вид информационной избыточности в АСУТП обусг ловлен тем, что информация о действительном значении некоторого технологического параметра содержится не только в измеренном значении этого параметра, но и в измеренных значениях других параметров, связанных с ним устойчивыми зависимостями, например, уравнениями материального баланса. При разработке алгоритмов контроля достоверности исходной информации на основе информационной избыточности принимают следующие допущения: 1) маловероятно одновременное появление в пределах рассматриваемой структуры более чем одного источника недостоверной информации; маловероятно одновременное изменение характеристик двух независимых источников информации, при котором соот ношение между ними остается неизменным; маловероятен выход за допустимые пределы показателя, зависящего от нескольких независимых величин, при нормальной вариации последних. Алгоритмы, применяемые при аппаратурном резервировании И И К. Эти алгоритмы используют сигналы измерительной информации j/v, полученные в результате преобразования одной измеряемой величины с помощью п ИП, так что v=l,2,...п. Если я>3 и погрешности ИП близки друг к другу, то определение частичного отказа ИИК производится по нарушению условия где у — среднее значение i/v; с=const — наибольшее допустимое значение модуля разности у\ и у; величина с может быть принята равной (2—3) а, где а — среднеквадратичная погрешность ИП. Важное практическое значение имеет случаи, когда один из параллельных ИИК можно принять за эталонный, поскольку его погрешность существенно меньше, чем у других. В этом случае признаком частичного отказа v-ro ИИК является нарушение условия где cv = (2—3)ctv—допустимая погрешность v-ro ИИК; 0"v — среднеквадра тичная погрешность v-ro ИИК. J Разновидностью данного алгоритма является метод тестовых (калиброванных) сигналов, позволяющий контролировать исправность ИИК без ИП. Метод заключается в том, что ИП на время отключают и вместо него к входу ИИК подключают источник тестового сигнала, для которого с высокой точностью известно значение уэ- Если сигнал yv на выходе проверяемого ИИК удовлетворяет условию (3.65), то канал признают исправным; его нарушение является признаком частичного отказа. Если п = 2 и погрешности обоих ИИК близки, то признаком частичного отказа одного из них может служить нарушение условия: При этом невозможно определить отказавший ИИК без привлечения дополнительной информации. Алгоритмы, использующие связи между измеряемыми величинами. Эти алгоритмы широко применяют для контроля достоверности исходной информации и диагностики частичных отказов ИИК. При этом связи могут быть функциональными (например, уравнения материального и энергетического баланса) или вероятностными. В последнем случае они описываются регрессионными уравнениями. Рассмотрим общую методику контроля достоверности результатов измерения п величин, связанных т уравнениями вида Будем считать, что заданы функции f,(x) и дисперсии а<2 погрешностей измерения, которые являются случайными величинами с нормальным законом распределения и нулевым математическим ожиданием. Уравнения (3.66) выполняются только при подстановке в них истинных значений Xi измеряемых величин. Если же значения измеряемых величин известны с погрешностями Д#,-, т. е. то при их подстановке функции f/(x) не равны нулю: где // — погрешность выполнения /-го уравнения связи (3.66), вызванная погрешностями измерения. Функции fi(x) обычно являются непрерывными и дифференцируемыми по всем аргументам, поэтому их можно разложить в ряд Тейлора по степеням величин А*,-:  Поскольку при частичных отказах ИИК погрешности Axi малы, можно не принимать во внимание нелинейные члены ряда (3.68), содержащие в качестве сомножителей величины высших порядков (Ах)к, где k = 2,3,.... Тогда с учетом (3.66) из (3.68) получим: Подстановка уравнения (3.69) в (3.67) дает: где На практике расчет параметров ац проводят, используя не истинные, а измеренные значения xi, так что Система уравнений является линеаризованной математической моделью объекта управления или некоторой его части. Она служит для расчета оценок погрешностей А*,-, которые используют при контроле достоверности исходной информации и диагностике частичных отказов ИИК. Метод расчета погрешностей Ах,- зависит от соотношения между числом измеряемых величин п и числом уравнений связи т. При п = т значения Axi определяют одним из численных методов решения системы т линейных уравнений (3.72). При л>т можно попытаться уменьшить число рассчитываемых оценок погрешностей с п до т. Для этого результаты измерений q = n—т параметров следует заранее рассматривать как достоверные. Если такое допущение правомерно, задача сводится к рассмотренному выше варианту. В общем случае при п>т оценки погрешностей Axh определяют, решая оптимизационную задачу при выполнении соотношений (3.70). Весовые коэффициенты р(-, позволяющие учесть различие в классе точности ИП, рассчитывают по формулам [24] п где £=const, oi — среднеквадратичная погрешность i-того ИП. Для решения задачи нелинейного программирования (3.73) используют метод неопределенных множителей Лагранжа. Составляют функцию Лагранжа: где X, = const — множители Лагранжа. Для нее записывают необходимые условия оптимальности —з— = 0 и-^г- =0 в виде следующей системы (п-\-т) уравне- OXi OAj ний:  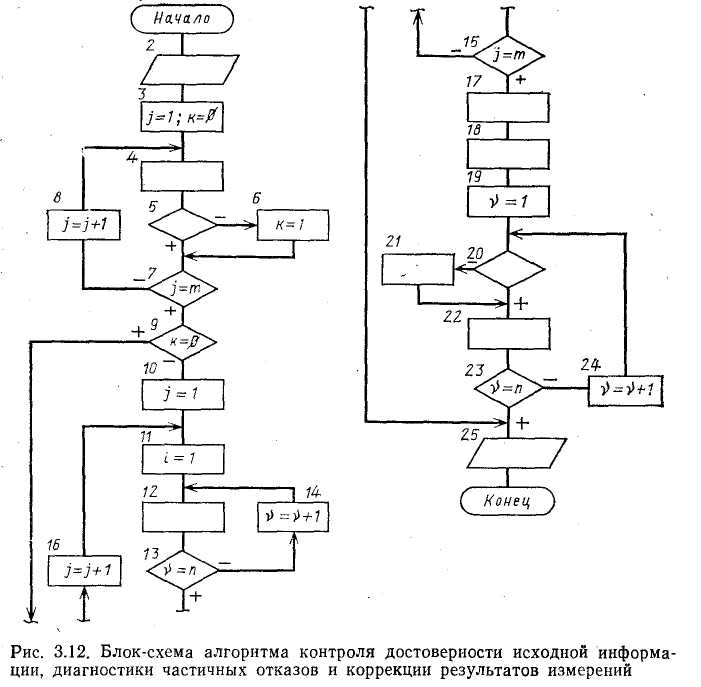 Искомые оценки погрешностей Axi являются решениями системы линейных уравнений (3.75) — (3.76). Рассчитанные значения оценок погрешностей используют для коррекции результатов измерений: Xi = xi—Axi. (3.77) Среднеквадратичная погрешность откорректированных значений измеренных величин меньше среднеквадратичной погрешности измерений ИИК, причем увеличение точности оценок тем значительнее, чем меньше разность п—т. На рис. 3.12 представлена блок-схема алгоритма контроля достоверности исходной информации, диагностики частичных отказов ИИК и коррекции результатов измерений, основанного на использовании функциональных связей между измеряемыми величинами. Он работает следующим образом. После инициации (блок /) в оперативную память УВМ вводятся исходные данные (блок 2) и начинается циклический рас- чет погрешностей // уравнений связи по формуле (3.67), для чего служат блоки 4, 7 и 8. В блоке 5 рассчитанные значения сравниваются с наибольшими допустимыми значениями /;*: Если условие (3.78) выполняется для всех уравнений связи, то все результаты измерения признают достоверными, т.е. х, = л;,-, и работа алгоритма заканчивается, тах как логическая переменная k сохраняет свое первоначальное значение k = 0. Нарушение условия (3.78) хотя бы для одного уравнения связи служит признаком наличия частичных отказов. При этом в блоке 6 логическая переменная k приобретает значение 1, и после окончания цикла расчета погрешностей I] уравнений связи алгоритм переходит к расчету оценок Axt погрешностей измерений (блоки 10—25). Он начинается с циклического вычисления оценок коэффициентов а/,- линеаризованных уравнений связи в блоках 10—16. Коэффициенты рассчитываются по формуле (3.71) в блоке 12. В блоке 17 формируется матрица коэффициентов a,i системы линейных уравнений (3.72) и матрица-столбец погрешностей //. Если расчет выполняется для случая п = т, то на этом работа блока 17 заканчивается. Для случая п>т матрица, формируемая блоком 17, дополняется строками, соответствующими уравнениям (3.75). Блок 18 предназначен для решения одним из численных методов системы линейных уравнений (3.72) или (3.75) — (3.76). Эта часть алгоритма требует основных затрат машинного времени и оперативной памяти ЭВМ. В результате работы блока 18 получают оценки погрешностей измерений Ах,-. В блоках 19—23 производится диагностика частичных отказов ИИК, для чего оценки Axt сравнивают с наибольшими допустимыми значениями погрешностей измерений Ах(*: Нарушение условия (3.79), которое проверяется в блоке 20, является признаком частичного отказа t-того ИИК; сообщение об этом формируется блоком 21. В блоке 22 рассчитывается откорректированное значение Xi измеряемой величины по формуле (3.77). Блок 25 служит для вывода результатов расчета, после чего работа алгоритма завершается. Исходными данными для работы алгоритма являются массивы следующих величин: измеренных значений параметров хг, допустимых погрешностей /,•* уравнений связи; допустимых погрешностей А*,-* измерений; весовых коэффициентов р,- (если п>от). Пример. Рассмотрим контроль достоверности результатов измерения расходов азотной кислоты, поступающей с производства на склад. Производство состоит из трех параллельно работающих агрегатов. На выходе каждого из них измеряется расход qt (г'еТГЗ) продукционной кислоты. Затем кислота поступает в коллектор, в котором измеряется общий расход <74. Поскольку расход qt является одним из основных отчетных параметров производства, для его измерения используют расходомер более высокого класса точности, чем для измерения расходов q\ — q% Исходные данные для алгоритма контроля достоверности исходной информации следующие: измеренные значения параметров *i= 12,1 т/ч; х2= 11,6 т/ч; £3=12,4 т/ч; 24=34,5 т/ч; допустимая погрешность выполнения уравнения связи 2*= 1,5 т/ч; допустимые погрешности измерения отдельных параметров Axt* = &.x2* = = Д*з*=0,45 т/ч; Д*4*=0,65 т/ч; среднеквадратичные погрешности измерения 01 = 0,3 т/ч; 02=0,2 т/ч; сг3= = 0,35 т/ч; о4=0,33 т/ч. Действуем в соответствии с блок-схемой на рис. 3.12. 1. Определим погрешность / выполнения уравнения связи между измеряемыми параметрами, которое в данном случае имеет вид: Проверка условия (3.78) приводит к выводу, что среди результатов, измерения Xi имеются недостоверные. Исходное уравнение (3.80) является линейным, следовательно, коэф фициенты линеаризованного уравнения (3.70) совпадают с коэффициентами уравнения (3.80): Для дальнейшего формирования системы уравнений (3.75) — (3.76) необходимо рассчитать весовые коэффициенты pi. Запишем условие (3.74) для заданных значений ы: 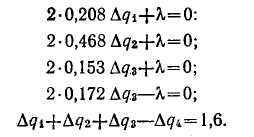 откуда £=0,0187; pi = 0,208; р2=0,468; р3=0,153; р4=0,172. Теперь запишем систему уравнений (3.75) —(3.76): Ее решениями являются следующие значения оценок погрешностей измерений: 4. Проверим выполнение условия (3.79). Как легко убедиться, оно не выполняется только для параметра <7з, из чего следует вывод о частичном отказе этого ИИК. В заключение рассчитаем откорректированные оценки значений измеряемых величин: <7i=ll,701 т/ч; ?2=11,423 т/ч; <7з=П,858 т/ч; «74=34,982 т/ч. При этих значениях удовлетворяется уравнение связи (3.80). Изложенный выше алгоритм можно использовать не только для определения частичных отказов ИИК, но и для более глубокой диагностики погрешностей измерения. Для этого подвергают статистической обработке расчетные значения погрешностей Axi, получаемые в последовательных циклах работы алгоритма. Оценка математического ожидания случайной вели- чины Axi за N циклов расчета характеризует систематическую погрешность измерения t-того ИИК: 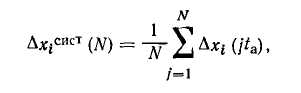 где ta — период, с которым выполняются расчеты по алгоритму контроля достоверности исходной информации. По формуле  рассчитывают оценку среднеквадратичной погрешности измерения. |