Основы дискретно логических систем управления ТП. Фильтрация с 124. Алгоритмы первичной обработки информации в асутп
 Скачать 0.75 Mb. Скачать 0.75 Mb.
|

|
Для оценки погрешности экстраполяции можно использовать выражение (3.15) с заменой в нем ^о на ig. Линейная интерполяция (рис. 3.7) является простейшим методом интерполяции, в основе которого лежит кусочно-линейная аппроксимация функции g(t) на интервале значений jto<-t<£ <(/+1)*о. Уравнение прямой, проходящей через точки g(jto) и ё{(/+1)^о]. можно записать в виде: Погрешность линейной интерполяции Подставляя в это выражение значение г/ф(О из формулы (3.16), возводя его в квадрат и усредняя по множеству интервалов, а затем по т в пределах от 0 до to, получаем выражение для дисперсии погрешности линейной интерполяции: В литературе описаны и другие, более сложные методы интерполяции и экстраполяции [24], однако на практике их применяют редко. Современные УВМ обеспечивают достаточно высокую частоту опроса ИИК, поэтому обычно удается обеспечить требуемую точность восстановления измеряемых величин, используя простейший метод ступенчатой экстраполяции. Обычно среди десятков и даже сотен ИИК можно выделить несколько групп параметров, близких по частотным спектрам. Тогда можно выбрать общий период опроса для каждой группы датчиков. Например, в производстве разбавленной азотной кислоты опрос группы датчиков, контролирующих малоинерционный процесс контактного окисления аммиака, проводится с периодом 15 с, а опрос датчиков на инерционном процессе абсорбции — с периодом 2 мин. Выбор частоты опроса измерительных преобразователей через число нулей случайного процесса. Выбор частоты опроса t0 по формуле (3.15) требует знания корреляционной функции Rs(r) случайного процесса g(t). Для получения оценки корреляционной функции необходим значительный объем вычислений. Кроме того, часто проще и естественнее задать не дисперсию ошибки Д» от замены непрерывного случайного процесса ступенчатым, а отношение этой величины к дисперсии случайного процесса D. Учтем также важность гарантии того, что выбранная частота опроса не приведет к появлению большей относительной погрешности, чем заданное значение, т. е. важно получить оценку сверху для периода опроса t0. Для решения поставленной задачи воспользуемся неравенством [22]:  Если бы продолжительность корреляционной функции можно было оценить без построения этой функции, то неравенство (3.17) позволило бы оценить интервал опроса /0- Ниже получим оценку величины А через среднее число нулей случайного процесса No, т. е. через среднее число пересечений им линии своего математического ожидания в единицу времени. Предварительно отметим, что рассмотрение процессов с корреляционной функцией конечной продолжительности более естественны, чем процессов со спектральной плотностью, ограниченной частотой среза, так как первые, в отличие от вторых, физически реализуемы. Известна связь среднего числа нулей No со спектральной плотностью случайного процесса 5(ш): Пользуясь этой формулой, попытаемся найти минимальную продолжительность корреляционной функции Rg, имеющей заданное число нулей No. В силу свойств преобразования Фурье, произведение любых двух функционалов, однозначнскопределяе-мых корреляционной функцией Rg, один из которых имеет размерность времени, а другой — частоты [последний выражается через преобразование Фурье от Rg(r)], не изменяется при сжатии или растяжении корреляционной функции, т. е. при изменении масштаба времени. Анализ размерности правой части формулы для iV02 показывает, что среднее число нулей имеет размерность частоты. В качестве функционала, имеющего размерность времени, примем 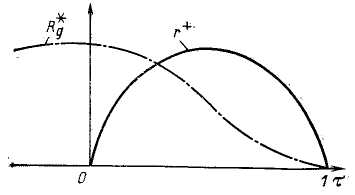 Рис. 3.8. Определение корреляционной функции минимальной продолжительности продолжительность А корреляционной функции Rg (t). Таким образом, произведение C=NqA зависит от фор- мы Rg(x) и не зависит от выбора масштаба времени. Поэтому первоначально зафиксируем /А=1 и при этом условии будем-искать минимум No, а точнее JV02. Чтобы учесть требование конечной продолжительности корреляционной функции, перейдем во временную область. Представим 5(ю) в виде |s(«o) |2, что соответствует представлению Rg(x) как свертки двух функций — г+(х) и /"(т), первая из которых определена на интервале (О, 1), а вторая — на интервале (0, —1). Формула для среднега числа нулей может быть теперь переписана в виде  Чтобы найти минимум N\ потребуем, как обычно, минимума числителя при фиксированном значении знаменателя. Задача  (индекс «+» для краткости записи опущен) решается с испольг-зованием уравнения Эйлера. Составим функционал Лагранжа  и запишем для него уравнение Эйлера Его решение (а точнее — множество решений): Подставив решение в условие для заданной дисперсии, получим-A2Q=D0/n. Величина / на найденных решениях /=£>0&2я2; тогда I/D0=kn2. Это отношение минимально для k = l. Соответствующее решение т+(т) показано на рис. 3.8. Там же нанесена корреляционная функция Rg*(x), имеющая при заданном среднем числе нулей минимальную продолжительность. При Д=1 величина Стщ оказывается равной единице. Следовательно, если фиксировано среднее число нулей No, то минимальная продолжительность корреляционной функции Amm=l/Af0. Пример. Пусть относительная дисперсия, связанная с дискретностью опроса датчиков, не должна превышать пяти процентов. По формуле (3.19) имеем для t0 оценку Возвращаясь к неравенству (3.17) и подставляя вместо Д значение Amm, получим оценку сверху для интервала опроса: Для получения No определяют среднее значение случайного процесса, выбирают реализацию такой длины, чтобы случайный процесс пересекал линию среднего значения приблизительно 100 раз, и подсчитывают отношение числа пересечений к длине реализации: No=N(T)/T. Если число пересечений в точности равно 100, то, обозначив соответствующую продолжительность реализации через Г1Оо, получим: Таким образом, на реализации длиной Тюо нужно 500 раз отобрать показания измерительного преобразователя. 3.3. ФИЛЬТРАЦИЯ ИЗМЕРЯЕМЫХ ВЕЛИЧИН ОТ ПОМЕХ Фильтрацией называют операцию выделения полезного сигнала измерительной информации y(t) из его суммы с помехой e(t) (см. рис. 3.1). Обычно методы фильтрации основаны на различии частотных спектров функций y(t) и e(t): как правило, помеха бывает более высокочастотной. Для выполнения дальнейших выкладок примем следующие допущения: 1) функция y(t) является стационарным случайным процессом с известными статистическими характеристиками — математическим ожиданием Му, дисперсией Dy и автокорреляционной функцией, описываемой следующим выражением: 2) помеха e(t) также является стационарным случайным процессом, некоррелированным с полезным сигналом y(t); для нее известны статистические характеристики Ме = 0, De = kDy: В результате фильтрации получают оценку г/ф (г) сигнала измерительной информации, к которой предъявляют следующие требования: она должна быть несмещенной, т. е. должна удовлетворять условию среднеквадратичная погрешность оценки должна быть минимальна, т. е. Оценку уф(t) будем рассматривать как выходной сигнал линейного динамического звена — фильтра с АФХ №ф(т), на вход которого поступает выходной сигнал ИИК g(t) =y(t)-{-e(t). В разд. 1.5 сформулирована общая задача синтеза линейного оптимального фильтра и получены выражения для АФХ идеального (нереализуемого) и физически реализуемого фильтров. Однако синтез оптимального реализуемого фильтра является сложной задачей и, кроме того, требует достаточно точного задания характеристик полезного сигнала и помехи. Поэтому на практике обычно ограничиваются так называемым параметрическим синтезом фильтров, т. е. задают структуру функции Т^Ф^'со), а ее параметры определяют из условий (3.22) и (3.23).  Спектральную плотность функции e$(t) рассчитывают по формуле Расчет дисперсии погрешности фильтрации обычно выполняют в частотной области, используя выражение Функции Se(co) и Sy (ю) являются спектральными плотностями сигналов e(t) и у (t), которые получают в результате преобразования по Фурье автокорреляционных функций (3.20) и (3.21): На практике применяют несколько простых алгоритмов фильтрации, рассмотренных ниже. Следует отметить, что в АСУТП некоторые методы фильтрации могут осуществляться как аппа-ратурно (с использованием специальных аналоговых устройств), так и программно. Поэтому для каждого такого метода фильтрации изложен аналоговый и дискретный варианты реализации. Экспоненциальный фильтр*. В аналоговом варианте экспонен- Н  азвание фильтра обусловлено тем, что импульсная характеристика апериодического звена описывается экспоненциальной функцией. азвание фильтра обусловлено тем, что импульсная характеристика апериодического звена описывается экспоненциальной функцией.циальный фильтр представляет собой апериодическое звено и описывается дифференциальным уравнением где у и &ф — параметры настройки фильтра. Уравнению (3.28) соответствует АФХ где Гф=1./7 — постоянная времени фильтра. Из условия (3.22) для статического режима определяют оптимальное значение параметра k& (коэффициента усиления): Определение оптимального значения параметра у производится из условия (3.23), для чего предварительно рассчитывают спектральную плотность погрешности экспоненциального фильтра по формуле (3.25) с учетом (3.29) и (3.30): Дисперсия погрешности экспоненциального фильтра, согласно (3.24) —(3.25) с учетом (3.29), равна При вычислении этого интеграла оба слагаемых подынтегрального выражения раскладывают на простые дроби, каждая из которых сводится к табличному интегралу вида  После выполнения соответствующих преобразований получают следующее выражение для дисперсии погрешности фильтрации: ■Оптимальное значение параметра настройки у получают из необходимого условия экстремума функции Aj>(y): откуда  Таким образом, функция Оф(у) имеет единственную точку стационарности, тип которой зависит от знака второй производной при v=Y°- Можно показать, что при выполнении условия особая точка является минимумом функции Aj>(y)> а при выполнении условия km При программной реализации экспоненциального фильтра дифференциальное уравнение (3.28) заменяют разностным уравнением вида где / — номер цикла расчета. Отсюда получают следующее рекуррентное соотношение для вычисления сглаженного значения г/ф(/) в очередном /-том цикле ПЯГЦЙТЯ1 К достоинствам алгоритма экспоненциальной фильтрации относятся малая трудоемкость расчетов и малый объем памяти УВМ, в которой должна храниться величина у и обновляемая в каждом цикле расчета величина г/ф(/—1). Фильтр скользящего среднего в аналоговом варианте реализует вычисление среднего значения функции g(t) 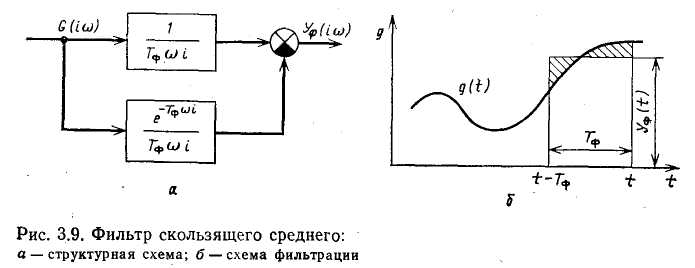 на интервале времени от t—Гф до t (рис. 3.9,6):  где Гф — параметр настройки фильтра (время усреднения). Преобразуем правую часть выражения (3.34), представив РГП R RH7ie% 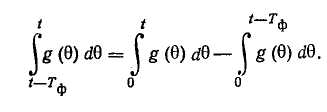 Отсюда видно, что фильтр скользящего среднего представляет собой параллельное соединение двух интегрирующих звеньев, одно из которых последовательно соединено со звеном запаздывания (рис. 3.9а). Поэтому амплитудно-фазовая характеристика фильтра описывается выражением которое аналогично по структуре выражению (3.12) и может быть преобразовано к виду Решая совместно (3.24) — (3.27) и (3.35), можно получить выражение для дисперсии погрешности А}> фильтра скользящего среднего и определить оптимальное значение Г°ф параметра настройки из необходимого условия минимума функции />ф(Гф). Получаемое при этом выражение очень громоздко, неудобно для практического использования. На его основе рассчитаны номограммы [24], по которым для заданных значений а, т, k можно определить 7"оф. При программной реализации фильтра скользящего среднего расчет сглаженного значения #ф(/) в очередном /-том цикле проводится по формуле А7 где N=T Для расчета по формуле (3.36) требуется хранить в памяти УВМ (N-\-l) значение функции g(jt0). Статистические фильтры. Статистическими называют фильтры, которые в аналоговом варианте представляют собой параллельное соединение (я+1) цепочек, состоящих из усилительного зве- на и звена чистого запаздывания. Передаточная функция такого фильтра |