анализ особенностей многопозиционной радиолокации. Анализ особенностей многопозиционной радиолокации. Анализ особенностей многопозиционной радиолокации
 Скачать 1.17 Mb. Скачать 1.17 Mb.
|

|
Реферат на тему «Анализ особенностей многопозиционной радиолокации» Содержание Введение…………………………………………………………………………...3 Общая характеристика многопозиционной РЛС. Определение и классификация…………………………………………………………………….4 Заключение………………………………………………………………….........11Список литературы………………………………………………………………12ВведениеОдним из перспективных направлений развития радиолокации является многопозиционная радиолокация (МПР). Основная идея МПР состоит в том, чтобы более эффективно (чем в обычных однопозиционных РЛС) использовать информацию, содержащуюся в пространственной структуре электромагнитного поля. При облучении цели поле рассеяния создается во всем пространстве. Однопозиционная РЛС извлекает информацию о цели только из одного малого участка поля, соответствующего апертуре приемной антенны. В многопозиционных РЛС (МП РЛС) и системах информация извлекается из нескольких пространственно разнесенных участков поля рассеяния цели (или поля излучения источника помех). Это позволяет существенно повысить информативность и помехозащищенность РЛС. Одновременно улучшаются и некоторые другие характеристики, в т. ч. живучесть. Пассивная радиолокация используется в тех случаях, когда решается задача обнаружения и определения координат целей по её собственному излучению. Источниками этого излучения могут быть: радиотехнические устройства на борту цели (станции постановки активных помех (АП), радиовысотомеры, станции связи и т. д.), тепловое излучение и др. Особенностью пассивной локации является отсутствие информации о времени излучения сигналов целями. Это обуславливает многопозиционность пассивных РЛС и необходимость решения задачи синтеза как структуры самой РЛС, так и алгоритмов обнаружения сигналов во взаимосвязанной постановке. Общая характеристика многопозиционных РЛС. Определение и классификацияПод МП РЛС понимается радиолокационная система, включающая несколько разнесенных в пространстве передающих, приемных или приемно- передающих позиций, в которой производится совместная обработка получаемой с помощью этих позиций информации о наблюдаемых объектах (рис. 1). 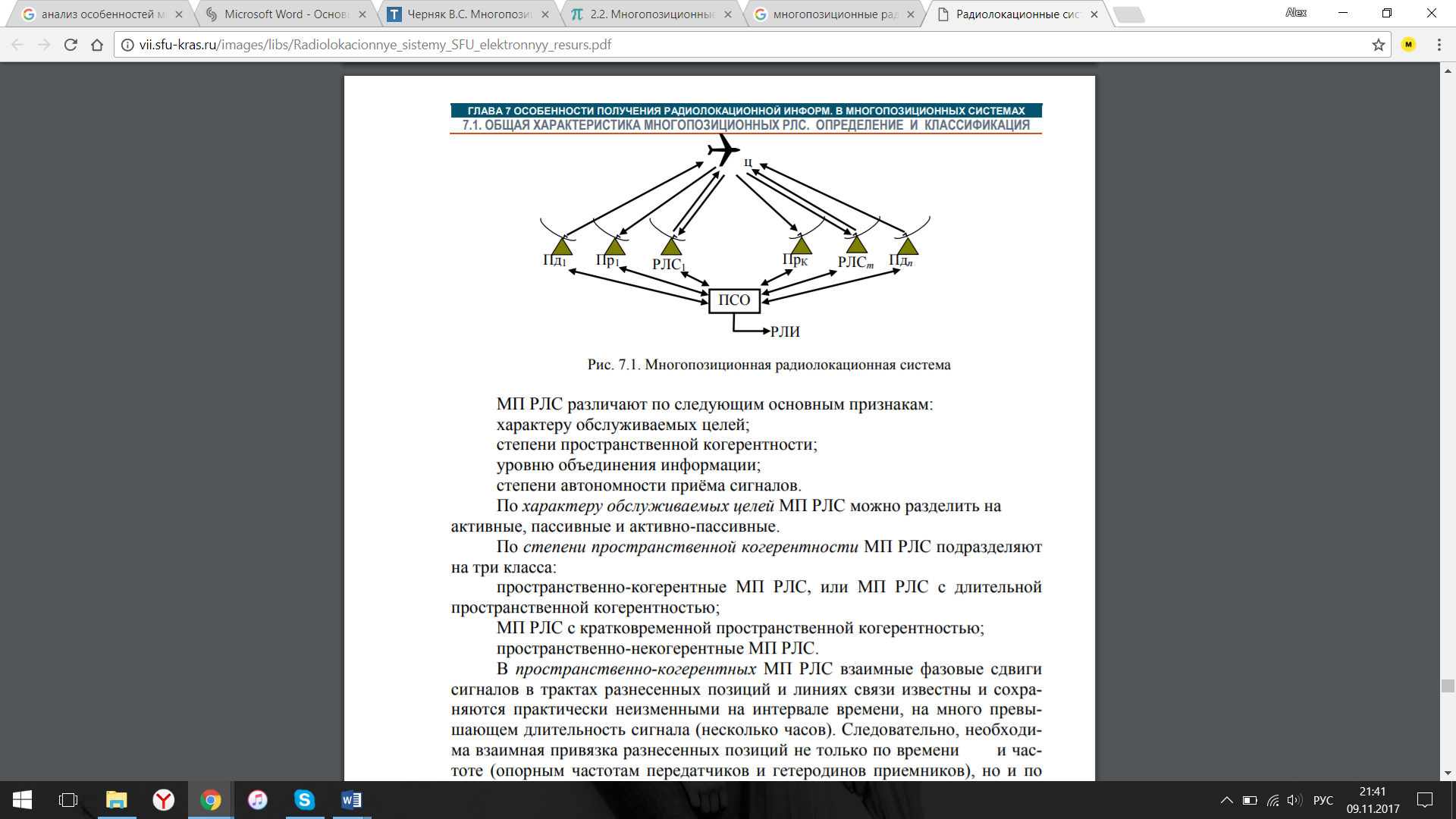 Рис. 1. Многопозиционная радиолокационная система МП РЛС различают по следующим основным признакам: характеру обслуживаемых целей; степени пространственной когерентности; уровню объединения информации; степени автономности приёма сигналов. По характеру обслуживаемых целей МП РЛС можно разделить на активные, пассивные и активно-пассивные. По степени пространственной когерентности МП РЛС подразделяют на три класса: пространственно-когерентные МП РЛС, или МП РЛС с длительной пространственной когерентностью; МП РЛС с кратковременной пространственной когерентностью; пространственно-некогерентные МП РЛС. В пространственно-когерентных МП РЛС взаимные фазовые сдвиги сигналов в трактах разнесенных позиций и линиях связи известны и сохраняются практически неизменными на интервале времени, на много превышающем длительность сигнала (несколько часов). Следовательно, необходима взаимная привязка разнесенных позиций не только по времени и частоте (опорным частотам передатчиков и гетеродинов приемников), но и по начальным высокочастотным фазам. С помощью какого-либо опорного сигнала (от радиоастрономического источника) взаимные фазовые сдвиги могут периодически измеряться и корректироваться или просто учитываться при обработке. Совокупность разнесенных позиций пространственно-когерентной МП РЛС можно рассматривать как единую разреженную антенную решетку. Под кратковременной пространственной когерентностью понимается способность МП РЛС сохранять пространственную когерентность на интервале времени порядка максимальной длительности применяемых сигналов. Обычно это время не превышает долей или единиц секунд. При совместной обработке сигналов может использоваться вся информация, содержащаяся в комплексных огибающих сигналов разных позиций, в т. ч. и в изменениях фазовых соотношений на интервале длительности сигнала для измерения тангенциальной скорости цели. Однако информация, содержащаяся в соотношении начальных фаз сигналов, не используется. Нельзя, например, измерять угловые координаты цели методом межпозиционной фазовой пеленгации. Число разнесенных позиций в таких МП РЛС может быть значительно меньше, чем в пространственно-когерентных МП РЛС и взаимная фазовая привязка позиций не требуется. В пространственно-некогерентных МП РЛС фазовая информация полностью исключается в результате детектирования сигналов до их объединения. В связи с этим не требуется не только фазовая, но, как правило, и частотная привязка позиций. Обычно необходима лишь взаимная привязка (синхронизация). Пространственно-некогерентная МП РЛС проще МП РЛС с кратковременной и длительной пространственной когерентностью. Однако исключение фазовой информации приводит к энергетическим и информационным потерям. Пространственная некогерентность МП РЛС не исключает временную когерентность каждой позиции до совместной обработки. По уровню объединения информации МП РЛС можно разделить на следующие классы: с объединением радиосигналов в линейной части приемных трактов (на высокой частоте – ВЧ или промежуточной частоте – ПЧ); с объединением видеосигналов; с объединением обнаруженных отметок; с объединением траекторий. При объединении радиосигналов на совместную обработку передается совокупность сигналов, внешних помех и собственных шумов от всех приемных позиций непосредственно либо после предварительной линейной фильтрации в каждой позиции. При этом до объединения сохраняется вся информация о целях и источниках помех, имеющаяся на входах МП РЛС. В таких системах требуются широкополосные линии связи. При объединении видеосигналов на совместную обработку передается вся совокупность сигналов, внешних помех и собственных шумов, но после детектирования в каждой позиции. Переход к объединению видеосигналов незначительно снижает требования к линии связи, но приводит к энергетическим и информационным потерям. При объединении обнаруженных отметок резко сокращаются требования к пропускной способности линии связи. Вся первичная обработка проводится в каждой позиции, а на совместную обработку поступает информация, признанная полезной. При объединении траекторий в каждой позиции проводится первичная и вторичная обработка, которая завершается построением траектории целей. Параметры траекторий передаются для совместной обработки, в результате которой дополнительно описываются «ложные» и уточняются «истинные» траектории. Реальные МП РЛС могут быть «комбинированными» – с объединением информации на различных уровнях. По степени автономности приема сигналов МП РЛС разделяют на три класса: с автономным приемом сигналов (МП РЛС объединяет несколько РЛС, каждая рассчитана на излучение и прием сигналов); с кооперативным приемом сигналов (все приемные позиции рассчитаны на прием и обработку отраженных сигналов от целей, облученных любой передающей позицией системы). со смешанным (автономно-кооперативным) приемом сигналов. Основные преимущества МП РЛС: Возможность создания зон действия требуемой конфигурации с учетом ожидаемой радиолокационной обстановки. Энергетические преимущества. Высокоточное измерение пространственного положения целей. Возможность измерения полного вектора скорости и ускорения цели доплеровским методом. Увеличение объема сигнальной информации о целях. Повышение защищенности от АП. Повышение защищенности от ПП. Измерение трех координат, векторов скорости и ускорения постановщиков активных помех (ПАП). Повышение живучести. Повышение разрешающей способности. Повышение пропускной способности. Рассмотрим основные из них. Энергетические преимущества проявляются в следующем: повышается общая энергетика системы за счет добавления радиопередающих устройств (РПУ) и радиоприемных устройств (РПрУ); снижаются потери СВЧ-энергии из-за исключения антенных переключений; флюктуации ЭПР (при большом разнесении позиций) оказываются независимыми в разных позициях, что может дать дополнительный энергетический выигрыш; может возрасти ЭПР. Имеется возможность определения всех трех пространственных координат путем измерения дальностей или суммарных дальностей цели относительно нескольких разнесенных позиций. Увеличение точности измерения координат цели в МП РЛС иллюстрируется на рис. 2, на котором изображены сечения тел ошибок для двухпозиционной РЛС.  Рис. 2. Иллюстрация возможности увеличения точности измерения координат цели в МП РЛС В пространстве каждое тело ошибок представляет сильно сплюснутый эллипсоид. Их пересечение образует тело ошибок при совместной обработке информации двух РЛС. Измеряя скорости изменения доплеровских смещений частоты, можно получить вектор ускорения цели. Использование доплеровских оценок скорости и ускорения повышает точность построения траекторий и качество сопровождения целей, особенно на участках, где происходят резкие изменения скорости (маневр самолета или торможение баллистической цели при входе в атмосферу). Увеличение объема «сигнальной» информации, под которой понимают содержащуюся в эхо-сигналах информацию о геометрических, физических и других характеристиках цели, а также характеристиках ее движения вокруг центра масс, обусловлено следующим. Измеряя амплитуду, фазу и поляризацию принятых разнесенными позициями сигналов, можно определять размеры, форму и характеристики собственного вращения цели точнее и за меньшее время. В пространственно- когерентных МП РЛС с достаточно большими размерами апертуры антенной системы (совокупности позиций) можно получать двухмерное и даже трехмерное радиоизображение цели. Высокая помехозащищенность МП РЛС связана с тем, что: создание прицельных по направлению помех позициям МП РЛС затруднено, так как направление на них часто неизвестно; затрудняется создание помех по главным лепесткам ДН одновременно нескольким позициям; применение разнесенных передающих позиций, излучающих сигналы различных типов и на разных частотах, затрудняет создание ответно- импульсных помех; снижается объем области пересечения главных лепестков ДН передающей и приемных позиций МП РЛС и соответственно уровень принимаемых ПП; имеются более широкие возможности выбора типа зондирующих сигналов для борьбы с помехами, чем в однопозиционной РЛС. 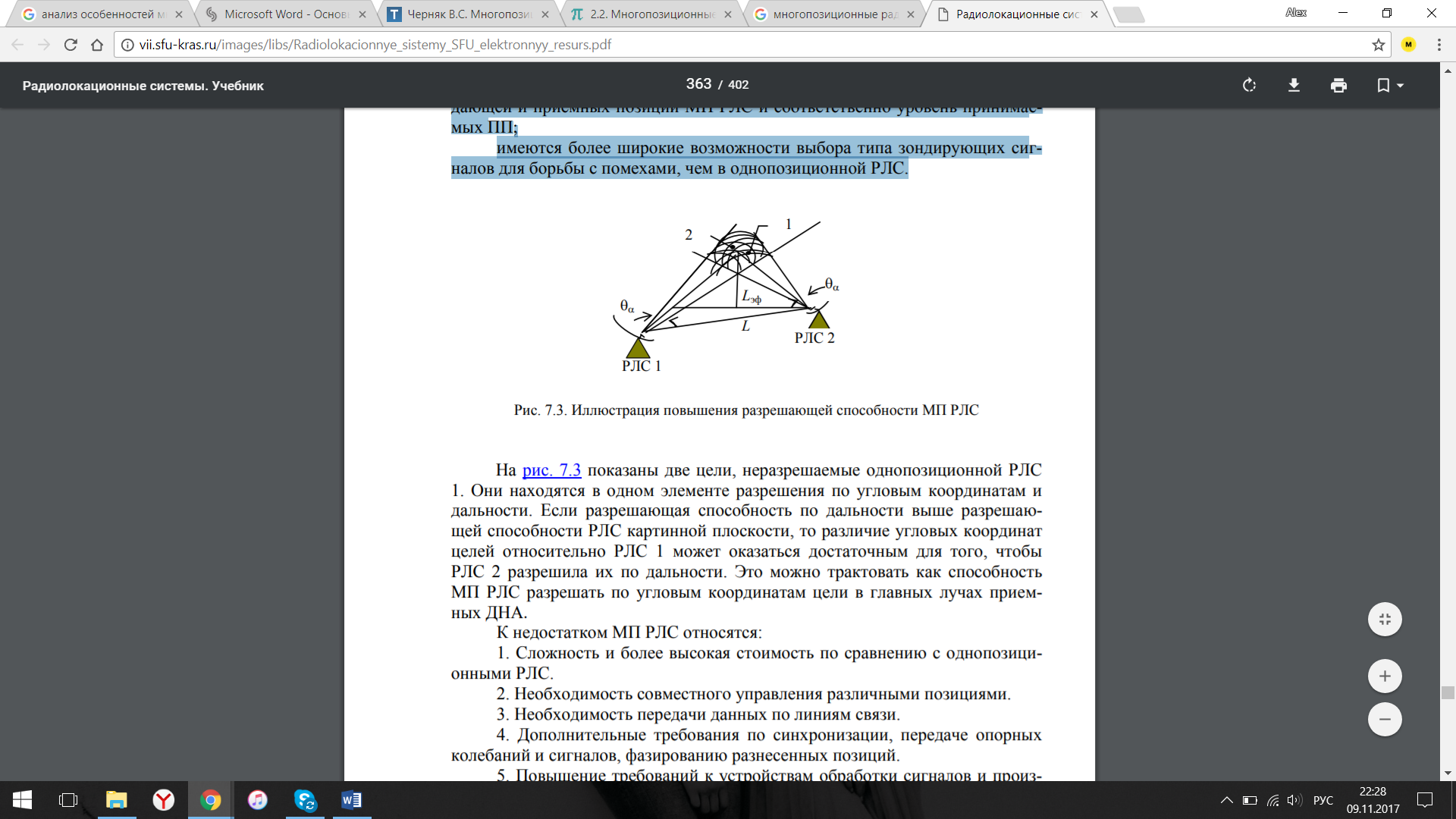 Рис. 3. Иллюстрация повышения разрешающей способности МП РЛС На рис. 7.3 показаны две цели, неразрешаемые однопозиционной РЛС 1. Они находятся в одном элементе разрешения по угловым координатам и дальности. Если разрешающая способность по дальности выше разрешающей способности РЛС картинной плоскости, то различие угловых координат целей относительно РЛС 1 может оказаться достаточным для того, чтобы РЛС 2 разрешила их по дальности. Это можно трактовать как способность МП РЛС разрешать по угловым координатам цели в главных лучах приемных ДНА. К недостатком МП РЛС относятся: Сложность и более высокая стоимость по сравнению с однопозиционными РЛС. Необходимость совместного управления различными позициями. Необходимость передачи данных по линиям связи. Дополнительные требования по синхронизации, передаче опорных колебаний и сигналов, фазированию разнесенных позиций. Повышение требований к устройствам обработки сигналов и производительности вычислительных средств. Необходимость геофизической или навигационной привязки и союстировки позиций. ЗаключениеТаким образом, представленная классификация МП РЛС позволяет выделить основные типы МП РЛС, соответствующие характерным уров- ням реализации схем пространственно-временной обработки сигналов и РЛИ. МП РЛС обладают более высокими ТТХ, чем однопозиционные РЛС, однако сложнее в реализации. Список литературыЧерняк, В.С. Многопозиционная радиолокация — М.: Радио и связь, 1993. - 416 с. Зайцев, Д.В. Многопозиционные радиолокационные системы. Методы и алгоритмы обработки информации в условиях помех. — М.: Радиотехника 2007.г. - 114 с. Широков, Ю.Ф. Основы теории радиолокационных систем [Электронный ресурс]: электрон. учeб. пособие / Ю. Ф. Широков; Минобрнауки России , Самар. гос. аэрокосм. ун-т им. С.П. Королева (нац. исслед. ун-т ). — Электрон. текстовые и граф. дан. (20,7 Мбайт). —Самара , 2012 . – 1 эл. опт. диск (CD-ROM). |