глава 2. Анализ возможных систем привода
 Скачать 46.19 Kb. Скачать 46.19 Kb.
|

|
Глава 2. Анализ возможных систем привода Поскольку в качестве приводных двигателей механизмов крана используются в основном только асинхронные двигатели (с короткозамкнутым или фазным ротором), то целесообразно рассматривать силовые системы управления именно на базе асинхронных двигателей, так как переход на синхронный привод не целесообразен по технико-экономическим причинам (нет выбора маломощных синхронных двигателей и дорогостоящие питающие их силовые преобразователи). Привод же постоянного тока также не целесообразен из-за более сложного и дорогого технического обслуживания, меньшей надёжности, постоянного режима ударной нагрузки (резкое снижение срока службы – требуются специальные двигатели), резкое удорожание модернизации электропривода вследствие замены двигателей, производства дополнительных механических, монтажных и наладочных работ и тому подобное. В свою очередь имеется значительное число систем электропривода на базе асинхронного двигателя и способов их регулирования обладающих различными возможностями, преимуществами и недостатками. Возможные способы регулирования скорости асинхронного электропривода можно разделить на три группы: Способы регулирования, при которых скольжение S изменяется в широких пределах и потери, выделяющиеся в виде теплоты в элементах роторной цепи, пропорциональны скольжению. Способы регулирования, при которых абсолютное скольжение Sа двигателя при регулировании остаётся небольшим и достигает критического скольжения на естественной характеристике (Sa меньше Sкр). Способы регулирования, при которых абсолютное скольжение при регулировании изменяется в широких пределах, но потери энергии скольжения в роторной цепи ограниченны. К первой группе способов регулирования скорости асинхронного электропривода относятся: реостатное регулирование регулирование изменением напряжения на статоре двигателя. При регулировании изменением напряжения на статоре двигателя потери в роторной цепи пропорциональны скольжению. Следовательно, при продолжительном режиме для исключения перегрева двигателя необходимо снижать его нагрузку в обратно пропорциональной зависимости от скольжения. Для двигателей с самовентиляцией это снижение должно быть больше с учётом ухудшения условий охлаждения по мере снижения скорости. Из-за наличия потерь в двигателе пропорциональных скольжению, область применения замкнутых систем электропривода по скорости при данном способе регулирования ограничивается механизмами с вентиляторной нагрузкой или работающие с кратковременным снижением скорости в течение цикла. Ко второй группе способов регулирования скорости асинхронного электропривода относится частотное регулирование и регулирование изменением числа пар полюсов. Регулирование изменением числа пар полюсов неприемлемо уже из-за дискретности изменения ω, не говоря уже о других технико-экономических показателях. Частотное регулирование момента асинхронного двигателя, по сравнению с системой постоянного тока, управляемой путём изменения напряжения якоря двигателя, более сложно в связи с отсутствием отдельного независимого канала регулирования потока двигателя, каким является обмотка возбуждения двигателя постоянного тока. Другой особенностью является сложность измерения ряда координат асинхронного двигателя, обусловленная работой двигателя на переменном токе. Поэтому в замкнутых системах частотного регулирования скорости для регулирования потока и момента двигателя используются положительные обратные связи, компенсирующие те или иные возмущении, а также косвенные методы измерения переменных. Для создания современных систем частотного управления асинхронного двигателя используется принцип ориентирования по полю двигателя, основой которого служат координатные и фазные преобразования переменных, упрощающих не только анализ динамических процессов электромеханического преобразования энергии, но и успешно применяются в качестве математической основы построения алгоритмов функционирования систем управления электропривода переменного тока. Данный принцип состоит в том, что если при применении асинхронного двигателя оперировать в целях управления не с реальными переменными машинами, а с преобразованным к координатным по полю осям, то можно отдельно управлять магнитным потоком и моментом двигателя, имея дело не с синусоидальными величинами, а с постоянными их преобразованными значениями. Данная система обеспечивает диапазон регулирования 30:1, хотя в некоторых источниках указывается диапазон регулирования 50:1. Однако, для механизма вылета стрелы такой диапазон является избыточным, кроме того такие системы отличаются большой сложностью устройства системы управления, дорогостоящие, требуют высокой степени квалификации обслуживающего персонала. Учитывая сказанное применение данной системы является не целесообразным. Существенным недостатком всех рассмотренных способов регулирования скорости асинхронного двигателя при ω0=const является возрастание потерь энергии в роторной цепи при снижении скорости пропорционально скольжению. Однако, у асинхронных двигателей с фазным ротором этот недостаток можно устранить путём включения в цепь ротора источника регулируемой электродвижущей силы, с помощью которой энергию скольжения можно либо возвратить в сеть, либо использовать для совершения полезной работы. Схемы асинхронного электропривода с включением в цепь ротора дополнительных ступеней преобразования энергии для использования и регулирования энергии скольжения получили название каскадных схем (каскадов). Если энергия скольжения преобразуется для возврата в электрическую сеть, то каскад называют электрический. Если энергия скольжения преобразуется в механическую энергию и поступает на вал двигателя, то такие каскада называют электромеханическими. Примером электрического каскада является каскад с асинхронным двигателем, работающем в режиме машины двойного питания. В цепь ротора асинхронного двигателя включается преобразователь частоты, способный как потреблять энергию скольжения и генерировать в сеть , так и передавать двигателю энергию из сети со стороны ротора на частоте скольжения, то есть управлять потоком энергии в цепи ротора как прямом, так и в обратном направлении. Однако, существует целая группа механизмов, у которых могут быть снижены требования к управлению потоком мощности скольжения на пути её возвращения в сеть или передачи на вал двигателя. К таковым относятся нереверсивные механизмы, работающие с реактивной нагрузкой на валу и не требующие работы двигателя в генераторном режиме в процессе торможения. В этом случае можно ограничиться однозначным регулированием скорости, при котором в двигательном режиме направление потока мощности скольжения неизменно, то есть от ротора двигателя на вал или в сеть. Это позволяет существенно упростить каскадные схемы, применив в канале преобразования мощности скольжения неуправляемый выпрямитель. Если далее для преобразования выпрямленного тока и его рекуперации используется электромагнитный агрегат, то каскад называется машинно-вентильным. В нём выпрямленный ток направляется в обмотку якоря двигателя постоянного тока, соединённого с валом асинхронного двигателя, который преобразует электрическую энергию скольжения в механическую, поступающую на вал асинхронного двигателя. Если же вместо электромагнитного агрегата далее используется вентильный инвертор ведомый сетью, то каскад называется вентильным (асинхронно-вентильным) каскадом. Асинхронно-вентильный каскад применяется в электроприводе небольшой мощности, потому их электрическое сопротивление Rэ больше, чем электрическое сопротивление Rэ машинно-вентильного каскада, используемого в электроприводе большой мощности, что вызывает более заметное изменение соответственно жёсткости механических характеристик при уменьшении скорости ωон. Поэтому для повышения точности регулирования используют автоматическое управление скорости каскада по отключению, подавая сигнал ошибки на вход ТП. Благодаря высокому коэффициенту усиления и быстродействия ТП создаются оптимальные возможности регулирования. Коэффициент полезного действия асинхронно-вентильного каскада выше, чем у машинно-вентильного каскада. К тому же нет дополнительных вращающихся электрических машин и не требуется дополнительн6ых фундаментов и механических монтажно-наладочных работ. Импульсное параметрическое регулирование скорости асинхронного двигателя можно осуществить как по цепи статора, так и по цепи ротора в случае использования асинхронного двигателя с фазным ротором. 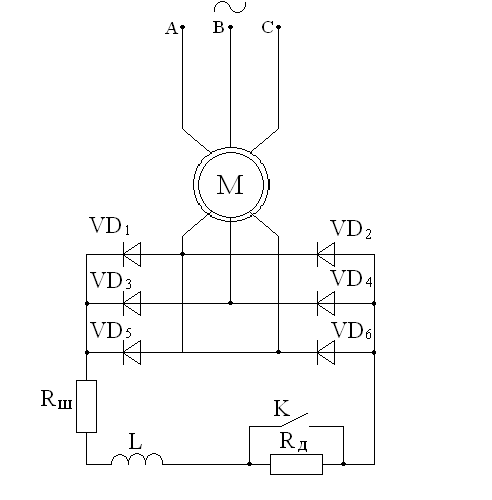 Рисунок 2.1 – Импульсное параметрическое регулирование скорости асинхронного двигателя по цепи ротора. В первом случае статические механические характеристики аналогичны характеристикам системы с теристорным регулятором напряжения асинхронного двигателя, а асинхронный двигатель может работать во всех четырёх квадрантах: в двигательном – I квадрант, в генераторном – II квадрант (с рекуперацией энергии в сеть), в динамическом торможении с независимым или самовозбуждением при наличии соответствующей схемы – III квадрант, IV квадрант (в режиме противовключения под действием активного момента). В качестве ключа К используется бесконтактный коммутатор (транзистор, тиристор) и при достаточно большой частоте коммутации f0 ключа можно считать, что в цепи статора включено сопротивление Rvar, величина которого плавно изменяется от 0 до R при изменении скважности γ импульсов от 1 до 0.  где  - длительность замкнутого состояния ключа; - длительность замкнутого состояния ключа; - период коммутации. - период коммутации.Связь между Rvar и γ выражается линейной зависимостью:  При снижении скорости (увеличении Rvar) резко падает момент, возрастают потери в цепи короткозамкнутого ротора  и выделяются в виде тепла, вызывая дополнительный нагрев двигателя. Возрастают потери и в резисторах (сопротивлениях) R (таких потерь в системе тиристорного регулятора напряжения асинхронного двигателя нет). Поэтому данная схема может быть использована в электроприводах малой мощности и в кратковременном режиме работы. Диапазон регулирования Д в продолжительном режиме обычно составляет (1,5 – 2):1. и выделяются в виде тепла, вызывая дополнительный нагрев двигателя. Возрастают потери и в резисторах (сопротивлениях) R (таких потерь в системе тиристорного регулятора напряжения асинхронного двигателя нет). Поэтому данная схема может быть использована в электроприводах малой мощности и в кратковременном режиме работы. Диапазон регулирования Д в продолжительном режиме обычно составляет (1,5 – 2):1.Лучшее использование двигателя при импульсном параметрическом регулировании угловой скорости асинхронного двигателя достигается когда применяется двигатель с фазным ротором. В этом случае дополнительные потери мощности, обусловленные регулированием угловой скорости в основном выделяются в добавочном резисторе R в не машины. Кроме того отсутствуют резисторы в цепях статора и соответственно исключаются дополнительные потери в них (Ссылка на рисунок «Импульсное параметрическое регулирование скорости асинхронного двигателя по цепи ротора»). Дополнительный резистор R включён через неуправляемый выпрямитель в роторную цепь последовательно со сглаживающим реактором L, необходимым для исключения режима прерывистых токов. Здесь, как и в предыдущей схеме, работа асинхронного двигателя возможна во всех четырёх квадрантах, а функционирование ключа К аналогично. Однако, зона регулирования расширяется, так как справа ограничивается ординатой, соответствующей величине Мкр асинхронного двигателя. Энергетические показатели при импульсном регулировании сопротивления несколько хуже, чем при ступенчатом изменении сопротивлений в фазах ротора. Это обусловлено пульсациями выпрямленного тока, увеличивающими потери; наличием в цепях обмоток ротора выпрямительного моста, который искажает форму тока фаз ротора, что приводит к появлению моментов высших гармоник и дополнительным потерям. Для осуществления реверса могут применятся контактные или бесконтактные (тиристоры) элементы. Введение СИФУ для управления тиристорами в цепях статора (тиристорного регулятора напряжения), различающих определённые алгоритмы позволит расширить зону регулирования вплоть до осей координат. Импульсное управление асинхронным двигателем с фазным ротором по цепи выпрямленного тока обеспечивает регулирование угловой скорости простыми средствами, плавно, в широких пределах и с высоким быстродействием. Учитывая, что тахограммы (циклограммы) работы механизма вылета стрелы представляют по форме трапеции (разгон, стабилизация скорости, торможение), то есть практически нет интервалов работы на пониженных скоростях, то система асинхронный двигатель с фазным ротором - широтно-импульсный регулятор в цепи ротора является наиболее предпочтительно для привода механизма вылета стрелы. При этом необходимо учитывать также ряд следующих обстоятельств, используется прежний асинхронный двигатель, не нужно проводить дополнительных механосборочных и наладочных работ, не требуется дополнительных площадей и фундаментных конструкций. Выводы по 2 главе: Проведён анализ технико-экономических показателей системы электропривода с целью возможности применения их в крановых механизмах. Подавляющее большинство портальных и плавучих кранов имеют грузоподъёмность от 5 до 25 тонн. Все их механизмы работают в повторно-кратковременном режиме работы с ПВ от 25% до 60%. Для привода механизмов используется как правило асинхронные двигатели. Циклограммы работы всех механизмов кранов по форме идентичны и включают все основные участки: разгон, работа с максимальной скоростью, торможение, работа с промежуточной (посадочной) скоростью, остановка (посадка) и пауза. Кривые М(t) и ω(t) должны иметь апериодический характер и оптимальный по быстродействию. Управление системой электропривода должно быть таким, чтобы исключались процессы колебаний и раскачивания механизмов и груза. |