курсовой. Автоматическое управление электроприводами
 Скачать 456.67 Kb. Скачать 456.67 Kb.
|

|
Курсовое проектирование курса "Автоматическое управление электроприводами" Задание ВАРИАНТ 1. Система генератор-двигатель 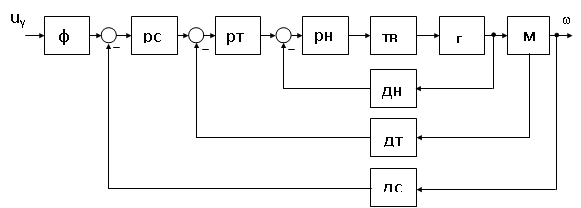
Содержание Введение……………………………………………………………………..3 1. Анализ системы автоматического управления…………………………7 2. Расчет и выбор преобразователя и вспомогательного оборудования…6 3. Расчет параметров электропривода…………………………………..….8 4. Статический расчет системы……………………………………………10 5. Расчет и построение переходных характеристик системы…………...16 6. Разработка принципиальной схемы электропривода…………………25 Заключение……………………………………………………………..…..26 Литература…………………………………………………………….……27 Введение Основным видом привода рабочих механизмов в промышленности является ЭП. Он представляет собой электромеханическое устройство, предназначенное для приведения в движение рабочей машины и состоящее из двигателя и механической части. Автоматизированный ЭП включает также в себя систему управления. Характеристики электродвигателя и возможности системы управления определяют производительность механизмама, точность выполнения технологических операций, динамические нагрузки и ряд других факторов. Наиболее широкие и благоприятные возможности управления процессами электромеханического преобразования энергии обеспечиваются изменением приложенного к якорной цепи двигателя напряжения. Для того, чтобы изменять подведенное к якорю напряжение, используют различного вида управляемые преобразователи. До сравнительно недавнего времени для этой цели преимущественно применялись электромашинные преобразователи - генераторы постоянного тока, а основной системой регулируемого ЭП была система Г-Д. В настоящее время в связи с развитием вентильных преобразователей ее применение сокращается, однако она продолжает успешно применяться во многих ответственных промышленных установках. 1. Анализ системы автоматического управления Как уже отмечалось выше, система Г-Д по прежнему все еще имеет широкое практическое применение, особенно для приводов большой мощности, правда, в настоящее время, вместо ранее используемых возбудителей на базе электромашинных и магнитных усилителей, применяют вентильные преобразователи, а при построении систем управления используют принцип подчиненного регулирования. Регулирование напряжения на якоре двигателя может обеспечить изменение скорости ниже основной (при постоянном моменте нагрузки), а регулирование полем двигателя - изменение скорости выше основной (при постоянной мощности). Следует учитывать, что система Г-Д характеризуется относительно низким значением КПД из-за многократного преобразования энергии, причем КПД быстро падает при уменьшении нагрузки. Генератор в системе Г-Д выбирается так, чтобы работа двигателя не ограничивалась генератором ни в тепловом, ни в коммутационном отношении. Мощность генератора определяется номинальным током и напряжением двигателя (с учетом потерь в силовой проводке). Если генератор имеет меньшую перегрузочную способность по току, то его мощность должна быть завышена так, чтобы максимально допустимый ток двигателя был допустим и для генератора. Приводной двигатель преобразовательного агрегата может быть асинхронным или синхронным, последний - предпочтительнее по энергетическим соображениям. Так, например, сопротивление якорной цепи определяется о учетом рабочей температуры обмоток. Если в каталоге не приведены величины сопротивлений обмоток, то их можно подсчитать через КПД. Рис.1 САУ системы генератор-двигатель (Г-Д) 2. Расчет и выбор преобразователя и вспомогательного оборудования Обоснование способов пуска, регулирования скорости и торможения электродвигателя. В системе Г-Д возможно однозонное и двухзонное регулирование скорости. Двухзонное регулирование предусматривает увеличение скорости двигателя путем ослабления его магнитного потока. В проектируемом ЭП следует применять однозонное регулирование скорости, т.к. Мсм не уменьшается с ростом скорости, и к тому же механизм работает наиболее продолжительное время при максимальной скорости, что дает нам возможность предположить, что при принятии двухзонного регулирования (т.е. меньшей скорости за основную) выбранный двигатель будет занижен по мощности. А, следовательно, увеличение скорости путем ослабления потока нам не потребуется. Регулирование скорости двигателя будем осуществлять изменением подводимого к его якорю напряжения, которое в свою очередь будем регулировать изменением подводимого к обмотке возбуждения генератора напряжения, вводя в ее цепь добавочные сопротивления. Причем в переходных режимах двигатель будем полностью использовать по моменту. Торможение (останов) будем осуществлять свободным выбегом, т.к. на этом участке двигатель работает с малой относительно номинальной скоростью и время паузы больше максимального времени работы на одной из заданных скоростей, а, следовательно, останов произойдет достаточно быстро. Выбор генератора постоянного тока и гонного двигателя к нему. Расчет и выбор мощности генератора осуществляется по величине мощности и напряжению выбранного приводного двигателя. Номинальную мощность генератора определим исходя из условия:  где Рнд, Рнг – номинальные мощности двигателя и генератора соответственно: ηнд - номинальный КПД двигателя. Вычислим правую часть условия:  В повторно-кратковременном режиме гонный двигатель генератора при остановке приводного двигателя не отключается. Поэтому генератор и его гонный двигатель выберем на ПВ%н=100%. Основные данные выбранного генератора занесены в табл.1. Таблица 1 Основные технические данные генератора постоянного тока типа П81
Гонный двигатель (асинхронный короткозамкнутый) выбирается но мощности и скорости генератора. Причем его мощность определяется по условию:  Скорость гонного двигателя должна быть равна или незначительно отличаться от номинальной скорости генератора:  Основные данные тонного двигателя приведены в табл.2. Таблица 2 Основные технические данные асинхронного короткозамкнутого двигателя типа 4А180S4
3. Расчет параметров электропривода Расчет приведенных к валу двигателя статических моментов сопротивления Мci рабочей машины и построение зависимости скорости двигателя от Мсi, т.е. ωi= f(Мсi) Приведенные к валу двигателя статические моменты сопротивления рабочей машины в проектируемом ЭП равны по величине и рассчитываются по формуле для двигательного режима:  При их определении следует учесть момент холостого хода двигателя: Мхх = Мн - Мнв = 261 – 231=30 (Н*м), где Мн - номинальный электромагнитный момент двигателя; Мнв - номинальный момент на валу двигателя. Оба параметра вычисляются по паспортным данным двигателя, причем номинальный момент равен: Мн =К*Iян, = 3.1 *85 = 261 (Н*м), где К - коэффициент двигателя при номинальном потоке, равный: К=Се*Фн =349*0.109 =38.3 (В*с), где  Т.о. фактические моменты сопротивления рабочей машины найдем по формуле:  = 271.8 +30 = 301.8 Н • м = 271.8 +30 = 301.8 Н • мСкорости на валу двигателя, соответствующие статическим моментам. 4. Статический расчет системы Расчет и построение статических механических характеристик двигателя, на которых он будет работать в течении цикла, и гонного асинхронного двигателя Статические механические характеристики проектируемого регулируемого ЭП будем строить по двум точкам с координатами: 1) ω=ω0i; М=0 (точка идеального холостого хода); 2) ω=ωci; М=Mci Скорость идеального холостого хода на i-ом участке определяется по формуле:  где Eгi - ЭДС генератора, необходимая для обеспечения работы двигателя с i-ой; установившейся скоростью при моменте сопротивления Мсi, определяемая по формуле:  Но прежде чем ее вычислять, приведем сопротивления к рабочим температурам по формуле:  где Rх - сопротивление в холодном состоянии; α- температурный коэффициент, для меди α=0.0041; tнагр, tок.с - температуры двигателя в нагретом (рабочем) состоянии и окружающей среды соответственно. Вычислим приведенные сопротивления якоря и обмотки возбуждения двигателя; Rяд = 0.0356•[1 + 0.0041•(115 - 20)] = 0,174 Ом, Rов= 46.2•[1 + 0.0041•(115- 20)] = 226,15 Ом. Приведенные сопротивления якоря и обмотки возбуждения генератора: Rяг = 0.0356•[1 + 0.0041•(75 - 20)] = 0.115 Ом, Rов= 46,2•[1 + 0.0041•(75 - 20)] = 150,38 Ом. Теперь вычислим ЭДС генератора для каждого установившегося режима:    Тогда скорость идеального холостого хода в установившихся режимах:    Требуемый магнитный поток возбуждения генератора, обеспечивающий необходимую ЭДС в i-ом установившемся режиме работы найдем по формуле:  где Сег - конструктивный коэффициент генератора, который найдем по формуле:  здесь N, Рn- число проводников обмотки якоря и число пар полюсов генератора Подставим численные значения:     Iвгi - ток возбуждения генератора, обеспечивающий необходимую ЭДС в i-ом установившемся режиме работы. Этот ток находится по кривой намагничивания выбранного генератора. Для построения кривой намагничивания генератора необходимо знать по номинальный магнитный поток, который найдем по следующей формуле:  Егн=Uнг+Iнг*Rяг=230+259,92*0,115=259,89 Егн=Uнг+Iнг*Rяг=230+259,92*0,115=259,89 И номинальный ток возбуждения:  Кривую намагничивания построим по универсальной кривой намагничивания, имея ввиду, что Ф=φ*Фн, Iв=i*Iн (см. рис.6). Данные для построения занесем в табл.9. Таблица 9 Кривая намагничивания генератора
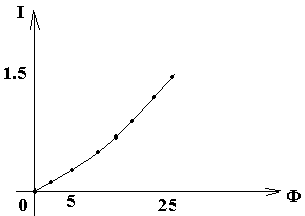 Рис.2  Рис.2.1 Статические характеристики Питание ОВГ осуществляем от тиристорного возбудителя. Получили все необходимые параметры в установившихся режимах. Теперь построим статические механические характеристики (см. рис.3) по следующим точкам,найденным выше: 1) первая точка: М=0; ω01=50.1 c-1 вторая точка: Мс=25 Нм; ωc1=50 c-1 2) первая точка: М=0; ω02=25.1 c-1 вторая точка: Мс=250 Нм; ωc2=25c-1 3) первая точка: М=0; ω0310.1 c-1 вторая точка: Мс=-250 Нм; ωc3=10 c-1 Естественную механическую характеристику М(S) гонного асинхронного двигателя построим по упрощенной формуле Клосса, задаваясь текущими значениями скольжений в пределах S=(0,0 - 0,8)-Sк  где Мк - критический (максимальный) момент двигателя; S, Sк - текущее и критическое скольжения cоответственно. Критическое скольжение найдем по формуле:  где λн - номинальная перегрузочная способность двигателя по моменту. Вычислим эту перегрузочную способность, для чего найдем номинальный и критический моменты по формулам:   где R1, R’2 - активные сопротивления статора и приведенного к статору ротора; Хк - индуктивное сопротивление короткого замыкания. Сначала переведем сопротивления из о.е. в именованные (данные дальнейших расчетов в табл.8). Номинальное полное сопротивление:   Тогда ТогдаR1 =r1*Zн = 0,088 Ом; X1 =х1*Zн =0,217 Ом; R2' =r2'*Zн = 00,036 Ом; Х2' =х2'*Zн = 0,36 Ом Xк' = X1 + Х2' 0.583 Ом. Подставим численные значения в формулы номинального и критического моментов: Тогда номинальная перегрузочная способность:  отсюда отсюда Т.о. получили следующую формулу для построения естественной механической характеристики:  По результатам расчетов естественную механическую характеристику (см. рис.8).  Рис.3 Механическая характеристика 5. Расчет и построение переходных характеристик системы Для построения структурной схемы ЭП двигателя постоянного тока независимого возбуждения необходимо написать уравнение динамической механической характеристики этого двигателя совместно с уравнением движения в операторной форме в предложении жестких механических связей и с учетом ЭДС управляемого преобразователя (ГПТ) и его передаточной функции. Питаем ОВГ тиристорным возбудителем:  где Ктв - коэффициент усиления тиристорного возбудителя; Ттв - постоянная времени тиристорного возбудителя; Uвг - напряжение возбуждения генератора. Исходя из того, что Ттв ≈0,01-0,003 пренебрегаем ей. Т.е. Ттв=0 И формула примет вид:  Динамические процессы в ЭП описываются уравнением:  где  , т.е. , т.е. Обе части делим на Кд: Обе части делим на Кд:где  и и  С учетом этого формула примет вид:  где    - коэффициент усиления генератора; - коэффициент усиления генератора; Uу - номинальное напряжение на управлении ЭП (12В); Уравнение механической динамической характеристики: (1+ТяР)*М=βе(ω0 – ω). где  - модуль статической жесткости механической характеристики. - модуль статической жесткости механической характеристики. где   Уравнение ЭП:  где  Структурная схема разомкнутой системы имеет вид (рис.4). 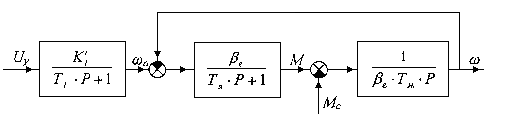 Рис.4 С учетом вычисленных значений получим модель. 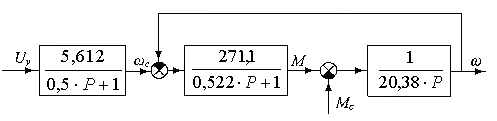 Рис.5 Точность поддержания скорости ЭП в установившемся режиме работы (статическая ошибка по скорости) определяёмгю соотношению:   где ω0р, ωс(Мн), ∆ωс(Мн) - скорость идеального х.х., статическая скорость и статическое падение скорости вращения при М=Мн на i-ой регулировочной характеристике. Определим точность поддержания скорости на каждом из участков работы ЭП:    Заданная точность поддержания скорости 3%. Как видно, это условие не выполняется, поэтому применяем замкнутую систему регулирования. При выборе замкнутой системы применяем систему с подчиненным регулированием координат. Поскольку на практике чаще всего используется стандартная настройка на технический оптимум (ТО), когда отношения постоянных времени контуров регулирования а=2, в проекте также настраиваем, контур скорости на оптимум. Расчет системы Г-Д выполняем при условии питания ОВГ от тиристорного возбудителя. Структурная схема системы Г-Д с внешним контуром скорости и подчинены контуром регулирования тока имеет вид: 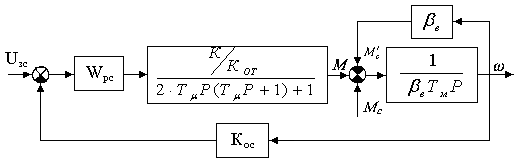 Рис.6 Структурная схема для моделирования электромагнитного момента и скорости вращения асинхронного электродвигателя представлена на рисунке 7.  Рис. 7. Структурная схема для моделирования гонного АД Структурная схема для моделирования магнитного потока и ЭДС вращения генератора представлена на рисунке 8.  Рис. 8. Структурная схема для моделирования генератора Структурная схема для моделирования тока в якорной цепи системы Г-Д, электромагнитного момента, скорости и ЭДС вращения приводного двигателя представлена на рисунке 9. 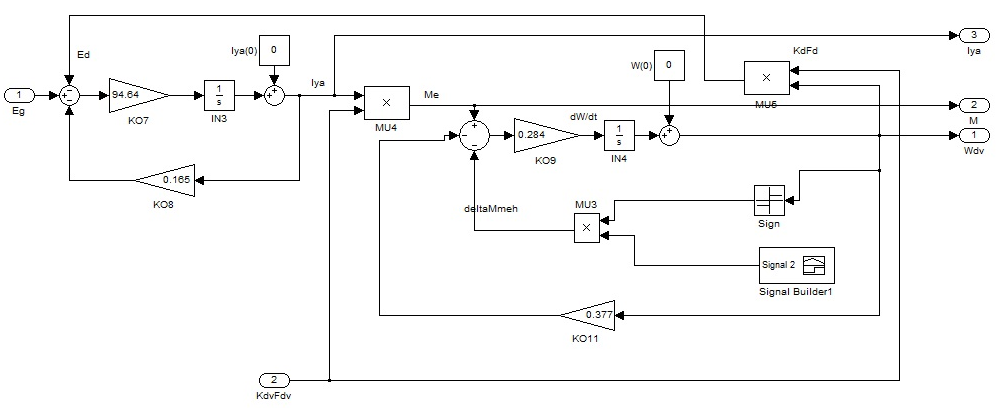 Рис. 9. Структурная схема для моделирования якорной цепи системы Г-Д Структурная схема для моделирования магнитного потока приводного двигателя представлена на рисунке 10. 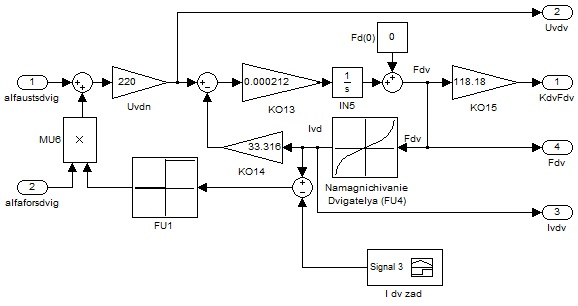 Рис. 10. Структурная схема для моделирования приводного двигателя 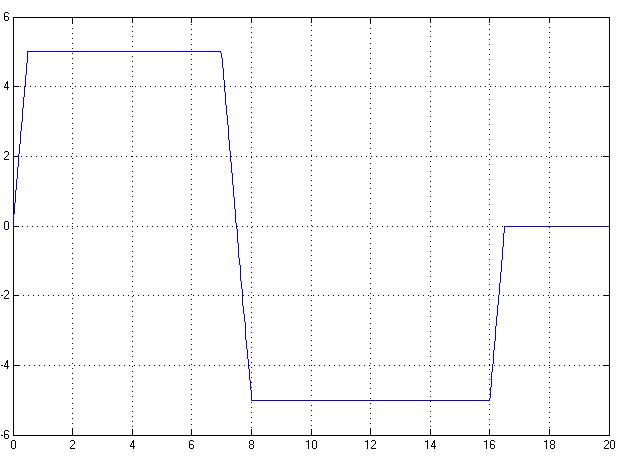 Рис. 11– Напряжение задания 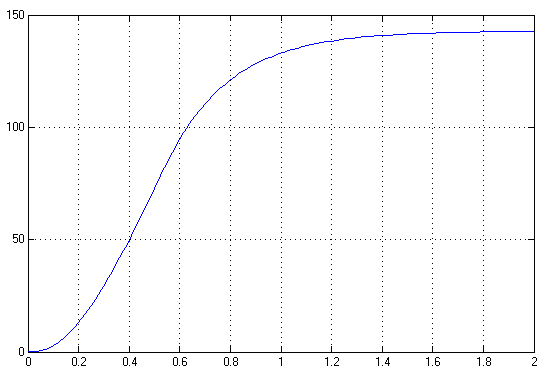 Рис. 12 – Угловая скорость двигателя 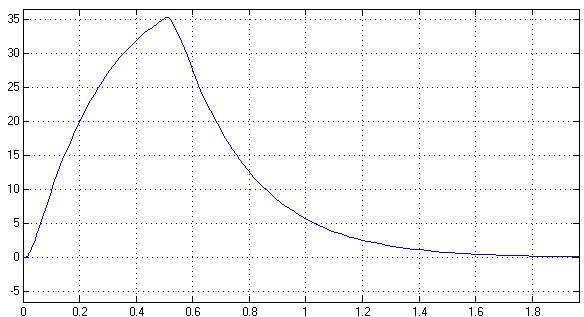 Рис.13 – Ток якорной цепи 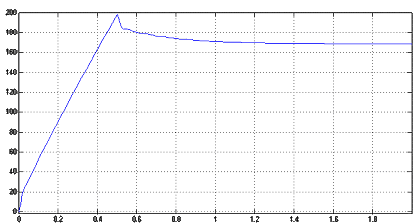 Рис. 14– Напряжение 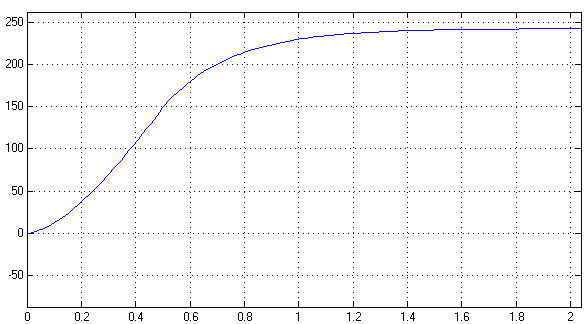 Рис.15 – ЭДС генератора Наброс активной и реактивной нагрузки 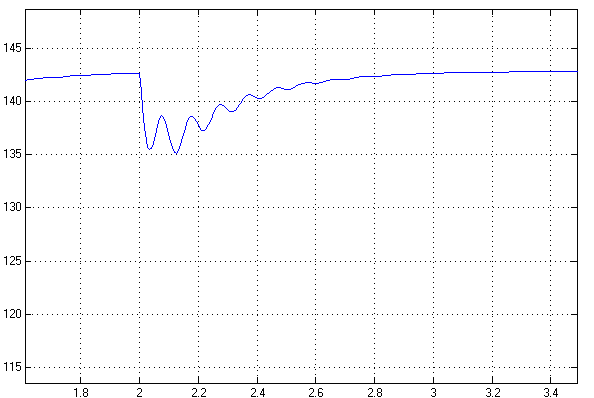 Рис.16 – Угловая скорость двигателя 6. Разработка принципиальной схемы электропривода На рис.17 изображена принципиальная схема электропривода генерато-двигатель. Схема имеет регулятор скорости РС и регулятор тока РТ на операционных усилителях. Генератор и двигатель имеют обмотку возбуждения ОВГ и ОВД. Датчик тока ДТ и датчик скорости ТГ обеспечивают обратную связь. АД – асинхронный двигатель гонный. 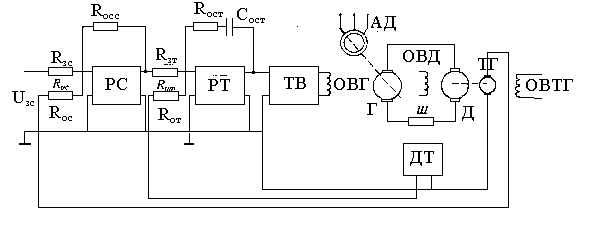 Рис.17 – принципиальная схема системы Г-Д Заключение В ходе выполнения курсовой работы был разработан электропривод по системе генератор-двигатель. В результате расчёта и структурного моделирования данной системы Г-Д в программе “MATLAB” было установлено, что с заданными требованиями она справляется. Система генератор-двигатель является одной из основных систем управления электропривода. Она имеет наибольшую надёжность и стабильность в процессе работы. Литература 1. Руденко В.С. и др. Основы преобразовательной техники / В.С. Руденко, В.И. Сенько, И.М. Чиженко,- М.: Высшая школа, 1980,- 422 с. 2. Васильченко С.А., Соловьев В.А. Расчет источников питания для электромеханических систем постоянного тока: Учебное пособие.- Хабаровск: Хабаровский политехн. ин-т, 1987.- 88 с. 3. Каганов И.Л. Электронные и ионные преобразователи : В 3 т.- т. 3, - М.: Госэнергоиздат, 1956.- 528 с. 4. Ривкин Г.А. Преобразовательные устройства. -М.: Энергия, 1970. - 544 с. 5. Справочник по преобразовательной технике / Под ред. И.М. Чиженко. - Киев: Техника, 1978.-447 с. 6. Силовая электроника: Примеры и расчеты: Пер. с англ. / Ф Чаки, И. Герман, И. Ипшич и др. - М.: Энергоиздат, 1982. - 384 с. 7. Гapнoв В.К., Рабинович В.Б., Вишневецкий Л.М. Унифицированные системы автоуправления электроприводоми в металлургии.-М: Металлургия, 1977.-192с. 8. Слежановский О.В. Реверсивный электропривод постоянного тока. -M.: Металлургия, 1967.-423с. 9. Данюшевская Е.Ю. Тиристорные реверсивные электроприводы постоянного тока.-М.; Энергия, 1970.-9с. 10. Башарин А.В., Голубев Ф.Н.,Кепперман В.Г. Примеры расчетов автоматизированного электропривода.-Л.: Энергия, 1972.-440с. |