Определить момент инерции электропривода, приведенный к валу дви. Решение Приведение инерционных масс и моментов инерции механических звеньев к валу двигателя заключается в том, что эти массы и моменты инерции заменяются одним эквивалентным (приведенным) моментом инерции на валу двигателя.
 Скачать 69.24 Kb. Скачать 69.24 Kb.
|

|
Для электропривода механизма подъема, кинематическая схема которого приведена на рисунке 3, а значения параметров элементов кинематической схемы и технические данные в таблице 1:
1. Определить момент инерции электропривода, приведенный к валу двигателя Решение: Приведение инерционных масс и моментов инерции механических звеньев к валу двигателя заключается в том, что эти массы и моменты инерции заменяются одним эквивалентным (приведенным) моментом инерции на валу двигателя. При этом условием приведения являются равенство кинетической энергии, определяемой эквивалентным моментом инерции, сумме кинетических энергий всех движущихся элементов механической части привода, т.е.  отсюда:  Где Jдв – момент инерции ротора двигателя, кг*м2, Ji – момент инерции i – го вращающего элемента, кг*м2, mj – масса j – го поступательно-двищущего элемента, upt = /i – передаточные отношения редуктора от вала двигателя до i -го вращающего элемента; j = vj / - радиус приведения поступательно-движущегося j-го элемента к валу двигателя, м Часто в каталогах для двигателей указывается величина махового момента GD2, выраженного кг*м2. В этом случае момент инерции в системе СИ вычисляется по формуле :  Jэкв= Jдв+ Jм+ Jp + Jб +m* (vj /)2=1,1+0,1+0,11+5,0+1250*1,52/78,52=6,77 кгм2 Определить момент сопротивления, приведенный к валу двигателя Решение: Для приведения к валу двигателя момента или усиления нагрузки рабочего органа производственной машины необходимо воспользоваться уравнением баланса мощности в механической части привода. При передаче энергии от двигателя к рабочему органу уравнение баланса имеет вид: Рс = Рр.о + Р (6.4) Где Рс = Мс* - мощность на валу двигателя, Р – мощность потерь в механических звеньях, - угловая скорость вала двигателя, Мс – момент сопротивления на валу двигателя, называемый также статическим моментом, Рр.о – мощность на рабочем органе. Если известен КПД механической части привода (), то При вращательном движении рабочего органа : Рр.о = Мр.о *р.о (6.6) Где Мр.о – момент нагрузки на рабочем органе, р.о. угловая скорость рабочего органа. Тогда  следовательно:  где up = /р.о –передаточное отношение редуктора. При поступательном движении Рр.о = Fр.о *vр.о Где Fр.о – усилие нагрузки на рабочем органе, Vр.о – линейная скорость движения рабочего органа. Следовательно  где = v/ - радиус приведения усилия нагрузки к валу двигателя. При передаче энергии от рабочего органа к двигателю Рс = Рр.о - Р Или  Мс = Fр.о ** - при поступательном движении (6.8) При определении эквивалентного момента инерции и момента статического сопротивления необходимо помнить, что общий КПД механической части электропривода равен произведению КПД отдельных элементов, а общее передаточное отношение редуктора равно произведению передаточных отношений отдельных звеньев. Изложение этого вопроса имеется в [3], [4], [6], [7]. а) при подъеме груза; Мс =(m*Dб/2*рб) =(1250*1/2*0.85*0.91)= 808 Нм б) при опускании груза. Мс = (m*Dб/2)*(2-1/рб)=(1250*1/2)*(2-1/0.85*0.91)= 441 нм Пояснить, в каких режимах работает двигатель при подъеме и опускании груза Решение: 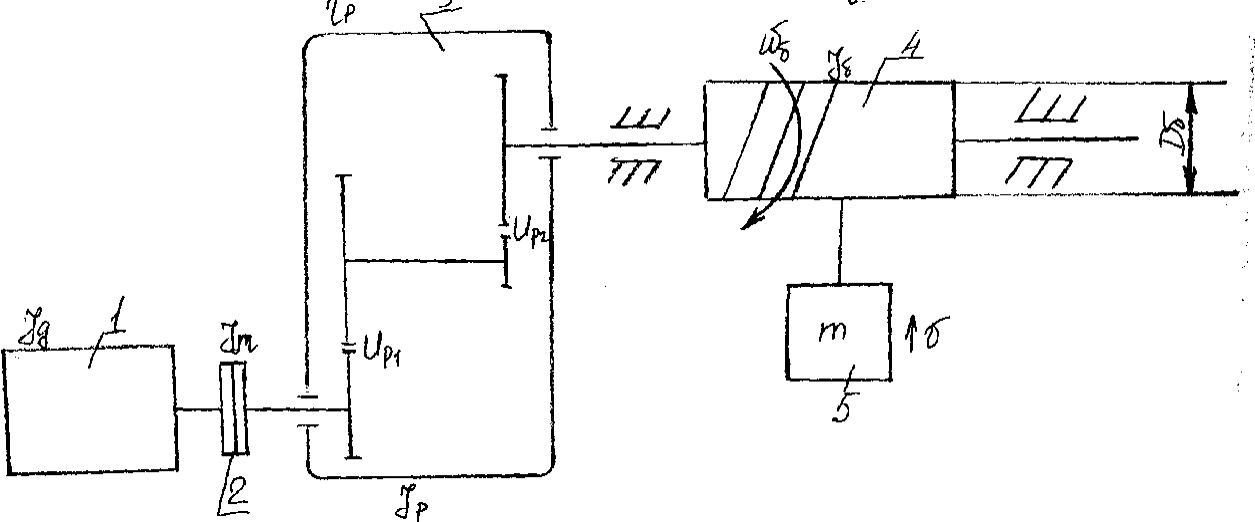 1–двигатель, 2–соединительная муфта, 3–редуктор, 4–барабан, 5-груз, J-момент инерции, Up-передаточное число редуктора, -угловая скорость, Dб-внешний диаметр барабана, - КПД Рисунок 3 – Кинематическая схема электропривода Режимы работы двигателей крана При работе крана происходит постоянное чередование направления движения крана, тележки и крюка. Так, работа механизма подъема состоит из процессов подъема и опускания груза и процессов подъема и опускания пустого крюка. Для увеличения производительности крана используют принцип совмещения операций. Время пауз, в течение которых двигатель не включен и механизм не работает, используется для навешивания груза на крюк и освобождения крюка и для подготовки к следующему процессу работы механизма. Каждый процесс движения, в свою очередь, может быть разделен на периоды неустановившегося движения (в течение которых происходит разгон или замедление движущихся масс груза и механизма) и период движения с установившейся скоростью. Электродвигатели, установленные на кранах, работают в тяжелых условиях, часто в помещениях с повышенной температурой или с большим содержанием в них паров и газов, а также на открытом воздухе. Мостовые краны имеют повторно-кратковременный режим работы, с частыми пусками и торможениями. Повторно - кратковременный режим – это режим работы двигателя, при котором рабочие периоды tраб чередуются с периодами отключения t0. Повторно - кратковременный режим работы характеризуется относительной продолжительностью включения (ПВ). где, tраб – время работы (с) tц – время цикла (с) Номинальное значение относительной продолжительности включения – 15, 25, 40, 60%. Рассмотрим режимы работы двигателей Двигатели механизмов моста и тележки при работе с грузом и без груза работают в нормальном двигательном режиме. При подъеме груза или пустого крюка двигатель подъемного механизма работает в двигательном режиме, а при опускании груза возможны два случая: - если момент груза Мгр больше момента двигателя Мдв, то груз будет опускаться под действием собственного веса с учетом момента трения Мтр и электродвигатель должен быть включен на подъем, чтобы подтормаживать груз, то есть в этом случае момент двигателя равен Мдв = Мгр - Мтр Такой режим называется тормозным спуском. - если момент груза будет меньше момента трения, то электродвигатель должен быть включен на спуск и способствовать опусканию груза, то есть работать в двигательном режиме, в этом случае момент двигателя равен Mдв = Мтр - Мгр Такой режим называется силовым спуском. При опускании пустого крюка так же возможны два случая, то есть спуск может быть и тормозным и силовым. |