Реферат Автоматизация гидромеханических процессов смешения жидко. Автоматизация гидромеханических процессов смешения жидкостей
 Скачать 163.84 Kb. Скачать 163.84 Kb.
|

|
Министерство образования и науки Республики Казахстан Карагандинский индустриальный университет Кафедра «Технологии искусственного интеллекта» РЕФЕРАТ По дисциплине: «Автоматизация производственных процессов» На тему: «Автоматизация гидромеханических процессов смешения жидкостей» Выполнил: Магистрант гр. АиУ-20нп Колончина Н.С. Проверил: ст. преподаватель кафедры «ТИИ» Спичак Е.В. Темиртау, 2020 г. 1 ОБЩАЯ ХАРАКТЕРИСТИКА ПРОЦЕССОВ ПЕРЕМЕШИВАНИЯ В ЖИДКИХ СРЕДАХ Перемешивание - гидромеханический процесс взаимного перемещения частиц в жидкой среде с целью их равномерного распределения во всем объеме под действием импульса, передаваемого среде мешалкой, струей жидкости или газа (Тябин Н.В.,с.95). Цели перемешивания: Создание суспензий - обеспечение равномерного распределения твердых частиц в объеме жидкости; Образование эмульсий, аэрация - равномерное распределение и дробление до заданных размеров частиц жидкости в жидкости или газа в жидкости; Интенсификация нагревания или охлаждения орабатываемых масс; Интенсификация массообмена в перемешиваемой системе (растворение, выщелачивание). 2 ОСНОВНЫЕ СХЕМЫ ПЕРЕМЕШИВАНИЯ  Рисунок 1 – Схемы перемешивания Механическое - перемешивание мешалками, вращающимися в аппарате с перемешиваемой средой. Барботажное - перемешивание путем пропускания через жидкую среду потока воздуха или газа, раздробленного на мелкие пузырьки, которые, поднимаясь в слое жидкости под действием Архимедовой силы, интенсивно перемешивают жидкость. Циркуляционное перемешивание - перемешивание, осуществляемое путем создания многократных циркуляционных потоков в аппарате с помощью насоса. Объект управления Объект управления - емкость с мешалкой, аппарат непрерывного действия, в котором смешиваются две жидкости А (с концентрацией целевого компонента Са) и Б (с концентрацией целевого компонента Сб) для получения гомогенизированного раствора с заданной концентрацией целевого компонента Ссм. 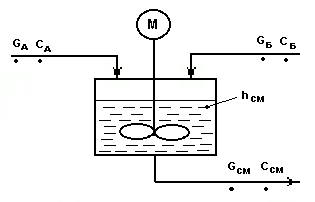 Рисунок 2 - Схема объекта управления Показатель эффективности процесса - концентрация целевого компонента в гомогенизированном растворе (смеси) - Ссм. Цель управления процессом - обеспечение заданной концентрации смеси при эффективном и интенсивном перемешивании. Эффективность перемешивания обеспечивается выбором параметров аппарата, перемешивающего устройства, числа оборотов мешалки, обеспечивающих равномерность концентрации смеси в аппарате с заданной интенсивностью (т.е. за заданное время). Однако в реальных условиях технологические объекты подвержены действию внешних и внутренних возмущений, которые приводят к отклонению технологических режимов работы от расчетных. Задача разработки системы автоматизации обеспечить в условиях действия внешних и внутренних возмущений в процессе эффективное и интенсивное его функционирование с требуемыми характеристиками качества. 3 ТЕОРЕТИЧЕСКИЕ АСПЕКТЫ ПРОЦЕССА МЕХАНИЧЕСКОГО ПЕРЕМЕШИВАНИЯ При вращении лопасти мешалки в аппарате возникает вынужденное движение жидкости, которое описывается критериальным уравнением вида:
где: - модифицированный критерий Эйлера Euм :
- модифицированный критерий Рейнольдса Reм :
- геометрический симплекс Г:
где dм - диаметр мешалки, м; n - скорость вращения мешалки, об /с; - плотность жидкости, кг/м^3; Nм - мощность, потребляемая мешалкой, вт; - динамическая вязкость, Па*с; КN – критерий мощности. 4 МЕТОДИКА РАСЧЕТА КОНСТРУКТИВНО- ТЕХНОЛОГИЧЕСКИХ ПАРАМЕТРОВ ПРОЦЕССА МЕХАНИЧЕСКОГО ПЕРЕМЕШИВАНИЯ Выбирают тип мешалки, ее диаметр dм, размеры аппарата Daпп и Hапп. Определяют коэффициент С в зависимости от размеров аппарата и типа перемешивающего устройства. Определяют число оборотов мешалки:
Рассчитывают Reм по соотношению (3). По графику KN = f(Reм) находят KN. Рассчитывают Nм из выражения (2):
Рассчитывают мощность Nдв, потребляемую приводом перемешивающего устройства:
где К - поправочный коэффициент, учитывающий конструктивные особенности аппарата и перемешивающего устройства; пер - к.п.д. передачи. В реальной установке непрерывного действия:
т.е. необходимо обеспечить:  и и  . .5 МАТЕРИАЛЬНЫЙ БАЛАНС ПО ЦЕЛЕВОМУ КОМПОНЕНТУ Уравнение динамики:
Уравнение статики при  : :
На основании (9) и (10) можно принять:
6 МАТЕРИАЛЬНЫЙ БАЛАНС ПО ВСЕМУ ВЕЩЕСТВУ Уравнение динамики:
Уравнение статики при  : :
На основании (12) и (13) можно принять:
7 ИНФОРМАЦИОННАЯ СХЕМА ОБЪЕКТА 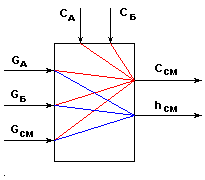 Рисунок 3 – информационная схема объекта Управляемые переменные - Ссм и hсм . Возможные контролируемые возмущения:  , причем задано, что , причем задано, что  . .Возможные управляющие воздействия:  . .Однако, в данном случае, Gсм определяется последующим технологическим процессом и поэтому не может использоваться в качестве регулирующего воздействия. 8 АНАЛИЗ УРАВНЕНИЯ ДИНАМИКИ НА ОСНОВЕ МАТЕРИАЛЬНОГО БАЛАНСА ПО ЦЕЛЕВОМУ КОМПОНЕНТУ Уравнение динамики в нормализованном виде
Начальные условия для вывода передаточной функции по каналу управления GA – Cсм :  ; ;  ; ; ; ;  . .Уравнение статики:
Уравнение динамики в приращениях: (после подстановки начальных условий в выражение (1), вычитания уравнения статики (2) и приведения подобных членов):
Уравнение динамики с безразмерными переменными:
Нормализованное уравнение динамики объекта во временной области без учета транспортного запаздывания:
Уравнение динамики по каналу управления  во временной области с учетом транспортного запаздывания: во временной области с учетом транспортного запаздывания:
Передаточная функция объекта по каналу управления :
где:
где Vтруб - объем трубопровода от Р.О. до входа в аппарат. 9 АНАЛИЗ УРАВНЕНИЯ ДИНАМИКИ НА ОСНОВЕ МАТЕРИАЛЬНОГО БАЛАНСА ПО ВСЕМУ ВЕЩЕСТВУ Уравнение динамики:
Начальные условия для вывода передаточной функции по каналу управления GБ – hсм :  ; ; ; ; ; ; . .Уравнение статики:
Уравнение динамики в приращениях: (после подстановки начальных условий в выражение (1), вычитания уравнения статики (2) и приведения подобных членов):
Уравнение динамики с безразмерными переменными:
Нормализованное уравнение динамики объекта во временной области
Уравнение динамики по каналу управления  во временной области с учетом транспортного запаздывания: во временной области с учетом транспортного запаздывания:
Передаточная функция объекта по каналу управления :
где:
где Vтруб - объем трубопровода от Р.О. до входа в аппарат. 10 АНАЛИЗ СТАТИЧЕСКОЙ ХАРАКТЕРИСТИКИ ОБЪЕКТА Уравнение статики на основе материального баланса по целевому компоненту:
Из уравнения (31) выразим  в явном виде: в явном виде:
Анализ выражения (32) показывает, что: - Статическая характеристика линейна по каналам:  ; ;- Статическая характеристика нелинейна по каналам  . .Линеаризованное представление статической характеристики на основе стабилизации соотношения расходов:  (или (или  ): ):
Линеаризованное представление статической характеристики через разложение в ряд Тейлора:
Обозначим:  Линеаризованное представление приращения выходной переменной через приращения всех возможных входных переменных:
11 ТИПОВАЯ СХЕМА АВТОМАТИЗАЦИИ ПРОЦЕССА ПЕРЕМЕШИВАНИЯ 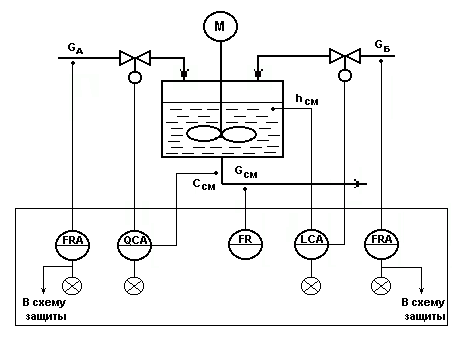 Рисунок 4 – Схема автоматизации процесса перемешивания Типовое решение автоматизации. Регулирование. Регулирование концентрации Ссм по подаче реагента GА - как показателя эффективности процесса перемешивания с целью получения гомогенизированного раствора. Регулирование уровня в аппарате hсм по подаче реагента GБ - для обеспечения материального баланса по жидкой фазе. Контроль. расходы - GА, GБ, Gсм ; концентрация - Ссм ; уровень - hсм. Сигнализация. существенные отклонения Ссм и hсм от задания; резкое падение расходов исходных реагентов GА или GБ, при этом формируется сигнал «В схему защиты». Система защиты. По сигналу «В схему защиты» - отключаются магистрали подачи исходных реагентов GА , GБ и отбора смеси Gсм. СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ https://www.bestreferat.ru/referat-57535.html https://poisk-ru.ru/s39924t11.html https://www.bibliofond.ru/view.aspx?id=727614 |