 Как устроены трансформаторные преобразователи?
Как устроены трансформаторные преобразователи?
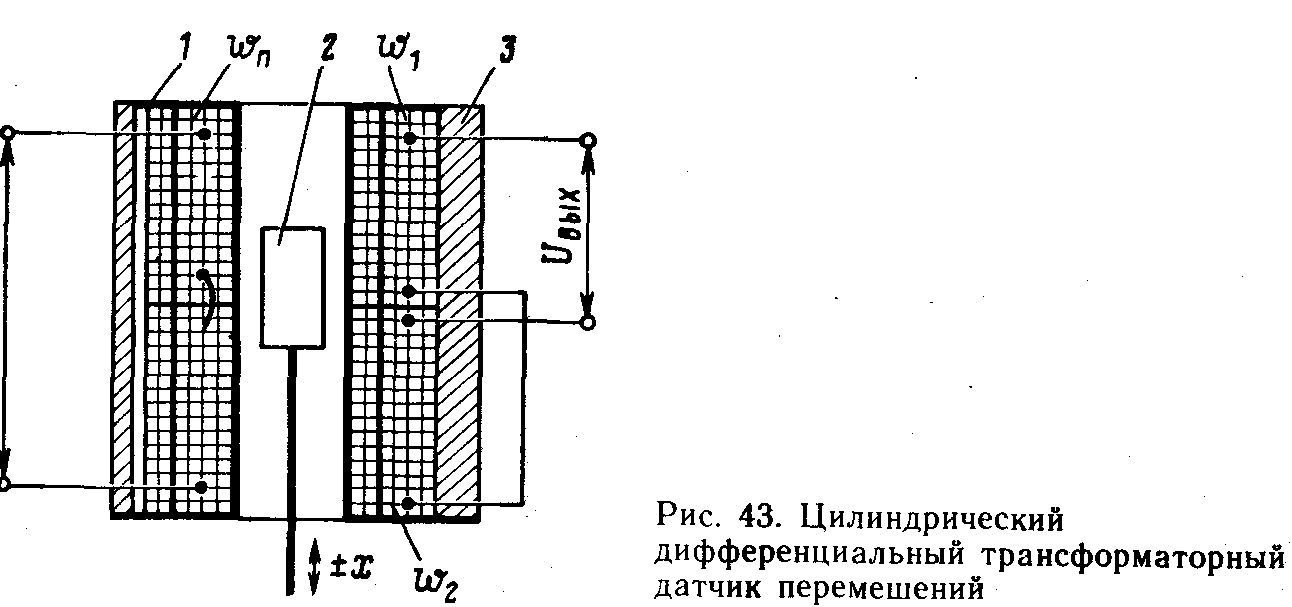
Цилиндрический дифференциально-трансформаторный преобразователь (рис.43) имеет три обмотки — первичную
Wn и две вторичные
W1=
W2=
Su, которые установлены на общем изоляционном каркасе
1.
Первичная обмотка, состоящая из двух последовательно включенных обмоток, уложена по всей длине преобразователя. Вторичные обмотки расположены одна в верхней, а другая в нижней части преобразователя и соединены между собой последовательно встречно. Такое расположение обмоток обеспечивает более равномерное распределение электромагнитного поля. Преобразователь имеет якорь
2 и магнитопровод
3 из листовой электротехнической стали. Обе детали имеют цилиндрическую форму.
В нейтральном положении якоря магнитные потоки, пронизывающие вторичные обмотки, равны. При этом выходное напряжение равно нулю. Перемещение якоря приводит к изменению магнитных потоков и наведению во вторичных обмотках трансформаторных ЭДС, не равных друг другу, а следовательно, к появлению выходного напряжения. С изменением направления перемещения якоря меняется фаза выходного напряжения на 180°.
Как действуют дифференциальные трансформаторные датчики?
П

одвижной железный сердечник (рис.44,
а,
б) влияет на индуктивную связь между переменным напряжением
U1, подаваемым на первичную обмотку, и напряжениями, индуктируемыми в двух последовательно соединенных вторичных обмотках. При этом вторичные обмотки соединены таким образом, что индуктируемые в них напряжения
U2 и
U3 направлены в противоположные стороны. Когда сердечник или экран находится в нулевом положении (строго симметричном), то во вторичных обмотках напряжения
U2 и
U3 одинаковы по значению. При перемещении сердечника или экрана противоположно меняются амплитуды индуцируемых напряжений: одна амплитуда увеличивается, другая уменьшается. Выходное напряжение датчика (
U2 -
U3) пропорционально перемещению Δ
l.
Дифференциальные трансформаторные датчики могут применяться также для измерения угла поворота.
Датчики и приборы для измерения уровня жидкости
В каких емкостях на судне необходимо контролировать уровень жидкости?
Объектами измерения (контроля, сигнализации) уровня являются цистерны, танки, баки с топливом, водой и маслом, находящиеся под атмосферным давлением, и емкости под давлением при значительных температурах.
Какие датчики и приборы применяют для контроля за уровнем жидкости?
Для контроля за уровнем применяют водоуказательные стекла, устроенные в виде колонок, действующих по принципу сообщающихся сосудов.
Сниженные указатели уровня действуют по принципу измерения гидростатического давления столбов воды в конденсационном сосуде или в барабане котла с помощью V-образной трубки (дифференциальный манометр),
заполненной цветной жидкостью, плотность которой больше плотности воды. Такой указатель уровня может быть установлен на значительном расстоянии от котла, что позволяет обеспечить дистанционное наблюдение за уровнем.
Регуляторы различают по способу измерения уровня и усиления.
Для измерения уровня применяют поплавковые, мембранные термогидравлические и другие преобразователи с электрическим выходным сигналом.
Какова область применения поплавковых датчиков уровня?
П
оплавковый датчик уровня в условиях качки может давать ложные сигналы, поэтому его применение — системы сигнализации регуляторы прямого действия. Это связано с тем, что качество регуляторов уровня с чувствительными поплавковыми элементами (они бывают шарообразной или цилиндрической формы) невысоко из-за трения в сочленениях рычажной системы. Неточности в измерении уровня увеличиваются во время качки судна условиях вибрации.
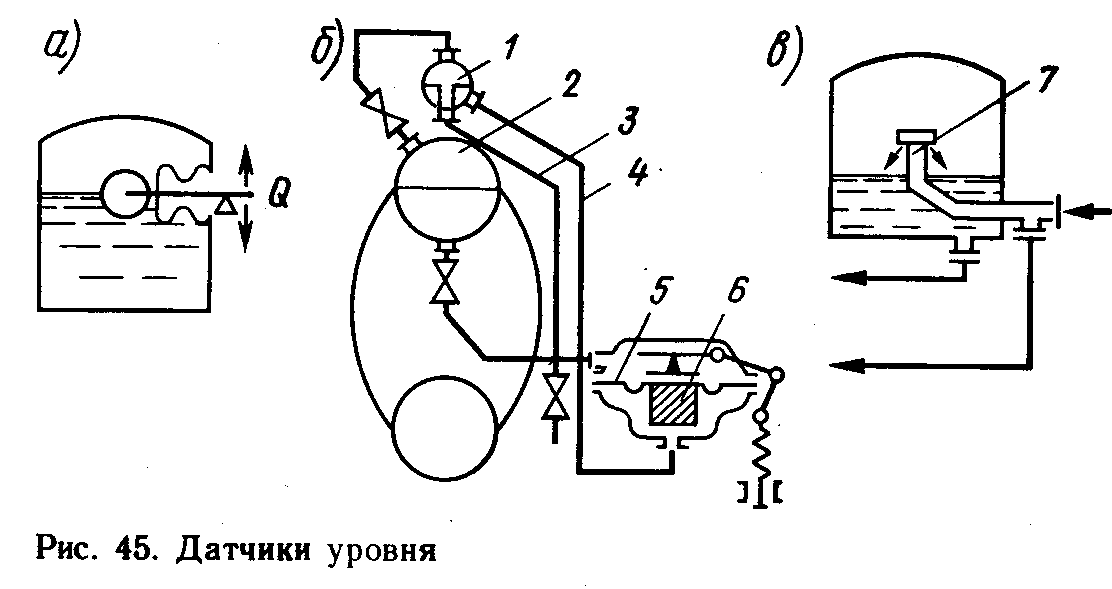
На рис.45,
а показана схема поплавкового датчика уровня. Выходным сигналом являются перемещение рычага
6 и усилие
Q, развиваемое на конце рычага. Величины
6 и
Q пропорциональны уровню в емкости.
Место выхода рычага из емкости обычно уплотняют с помощью сильфона.
Как действуют мембранные датчики уровня, и каковы их особенности?
Для измерения уровня часто используют мембранные датчики (рис.45,
б). С помощью мембраны
5 измеряется высота столба жидкости в трубах
3 и
4. В трубе
3 высота столба воды постоянная. Она зависит от среза трубы в конденсационном сосуде
1. В трубе
4 согласно принципу сообщающихся сосудов устанавливается уровень, одинаковый с уровнем в барабане котла. Таким образом, мембрана
5 находится под действием разности столбов, пропорциональной изменению уровня в барабане
2. Эти измерители уровня сконструированы так, что примерно 80% усилия, развиваемого мембраной, уравновешивается грузом
6, а оставшиеся 20% — пружиной. Кроме того, что груз уравновешивает значительную часть усилия, он компенсирует изменение столбов жидкости при качке.
Если вертикальная ось конденсационного сосуда
1 совмещена с осью симметрии емкости, это уменьшает влияние качки. С помощью конденсационного сосуда можно измерять уровень в емкостях, содержащих жидкость и ее пары (в коллекторах котлов, деаэраторах). Сосуд устанавливают выше измеряемого уровня и не изолируют. Если температура окружающей среды такова, что поступающие в конденсационный сосуд пары не конденсируются, сосуд следует охлаждать. Для этой цели его обвивают змеевиком, по которому пропускают воду.
Мембранный измеритель уровня имеет высокую чувствительность (примерно 9,8 Па). Однако при установке необходимо учитывать инерцию присоединенных движущихся масс жидкости и груза и жидкостное трение в импульсных трубках. Несмотря на это, мембранные измерители уровня получили наиболее широкое распространение на судах отечественной постройки.
Перед вводом в действие котла импульсную систему чувствительного элемента, включая его корпус, заполняют холодной водой через пробку в конденсационном сосуде, чтобы под воздействием котельного давления мембрана не была порвана. Все импульсные трубки, сообщающие конденсационный сосуд с барабаном котла и корпусом чувствительного элемента, должны прокладываться с постоянным уклоном не менее 1:10, чтобы исключить застой пузырьков воздуха в трубах.
В емкостях с низким давлением, например в конденсаторах, постоянный уровень можно получить при помощи трубки
7 (рис.45,
в), помещенной внутри емкости выше уровня жидкости. Через трубку непрерывно протекает вода из внешнего источника. Расход воды должен быть небольшим, чтобы свести к минимуму динамическую составляющую давления на мембрану чувствительного элемента, нагруженную давлением столба жидкости в трубке.
Воду к трубке можно подвести из напорного конденсатного трубопровода.
Как действуют мембранные датчики уровня с электрическим выходным сигналом?
Д
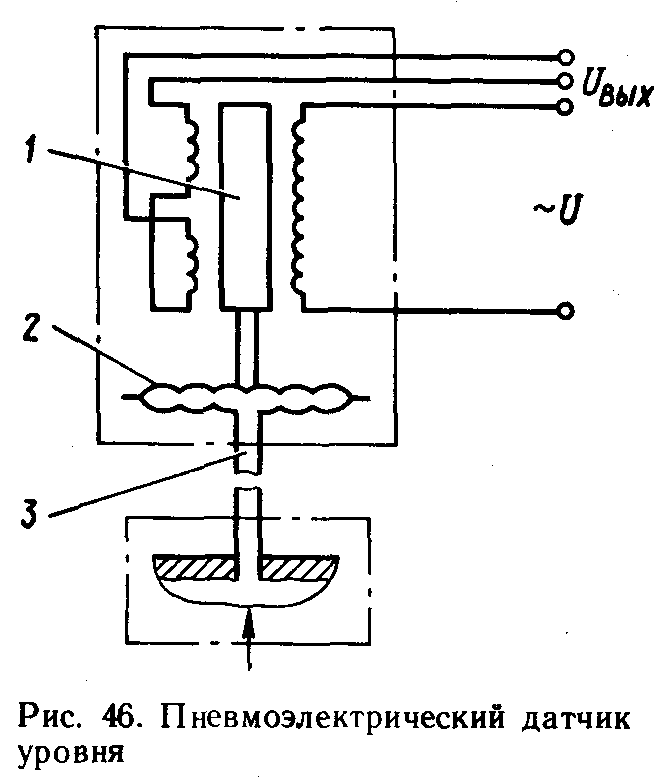
ля измерения уровня на судах широко используются мембранные датчики, в которых линейное перемещение преобразуется в электрический сигнал. Рассмотрим пневмоэлектрический датчик уровня (рис.46). Датчик имеет две мембранные коробки
2, состоящие из двух одинаковых мембран, соединенных по диаметру. Мембранные коробки сообщаются между собой с помощью капиллярной трубки
3. Под действием давления столба жидкости нижняя мембранная коробка сжимается, вследствие чего происходит выдавливание воздуха через капиллярную трубку в верхнюю мембранную коробку. Давление в этой коробке повышается, и она расширяется. Деформация мембранной коробки происходит до тех пор, пока давление воздуха не уравновесится силой упругости мембран.
К верхней мембранной коробке прикреплен якорь
1 дифференциального трансформаторного преобразователя. При деформации коробки якорь перемещается, поэтому выходное напряжение преобразователя будет определяться уровнем контролируемой жидкости.
Какие датчики уровня распространены на судах с автоматизированным управлением?
На суднах с автоматизированным управлением, особенно без постоянной вахты в машинном отделении, применяют автоматическое поддержание уровня во многих емкостях, например в расходных цистернах топлива. При этом обычно используют поплавковые реле. Большое распространение на судах иностранной постройки нашли поплавковые реле уровня фирм
«Мобрей» и
«Беста», а также типа CPM-2S.
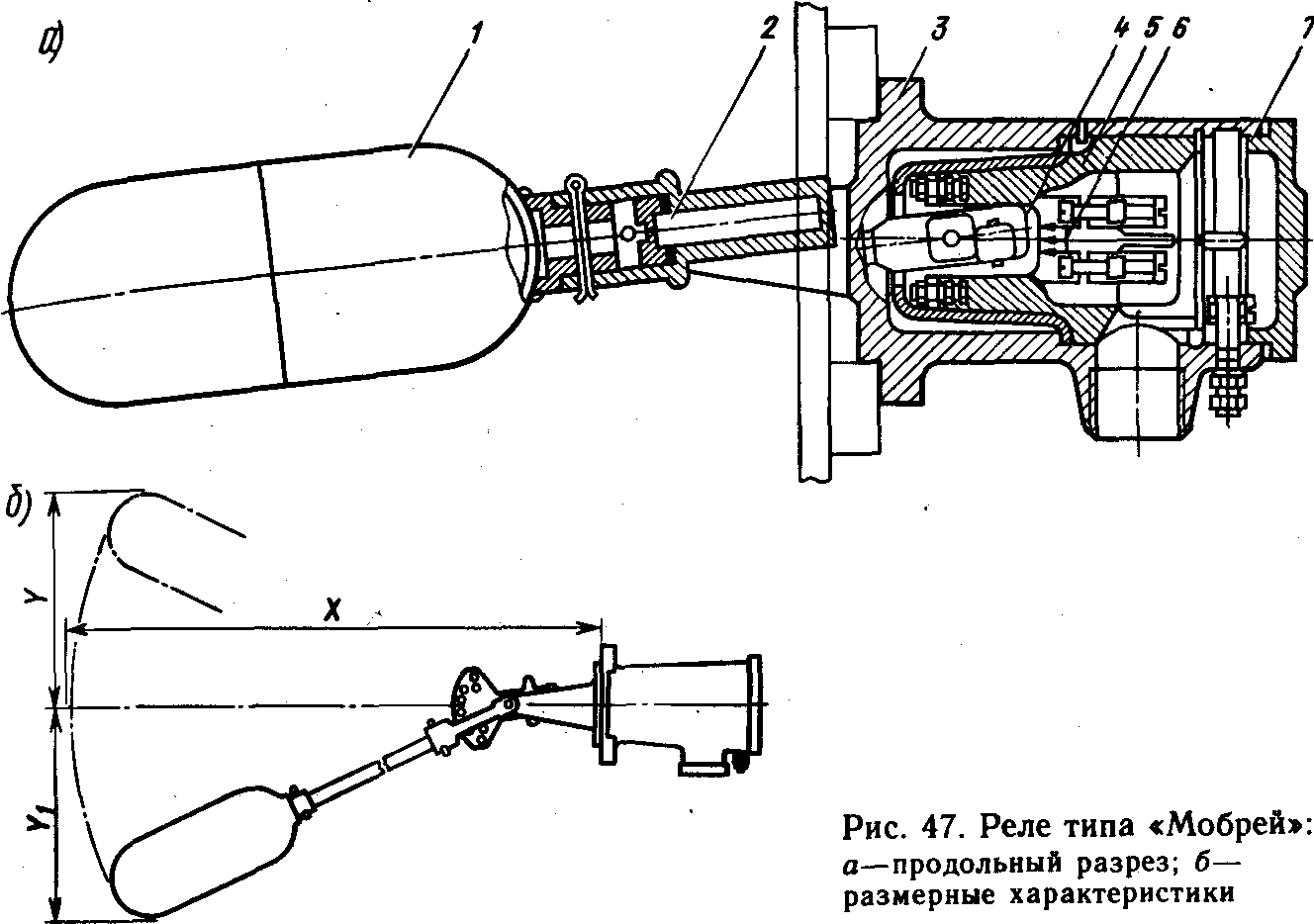
Что представляет собой реле уровня фирм «Мобрей» и «Беста»?
Реле уровня
«Мобрей» (рис.47,
а) состоит из следующих основных частей: 1 - поплавка, изготовленного из металла
монель; 2 - магнита подвижного
4 и неподвижного
6 контактов. В корпусе
3 на керамическом основании
5 выполнен механизм переключения. Крышка
7 изготовлена из алюминиевого сплава.
Основным преимуществом данного реле является то, что поплавковая часть отделена от контактной. Эти части механически не связаны. Постоянные магниты в поплавковой и контактной частях находятся в кожухах из немагнитного материала. Магниты установлены так, что одинаковые полюсы находятся один против другого, и потому отталкиваются. В положении, показанном на рис.47,
а, поплавок находится внизу, правый конец магнита
2 поднят, левый конец магнита в контактной части опущен, и верхние контакты замкнуты. Когда шток поплавка проходит среднюю линию, подвижной контакт размыкает один неподвижный контакт и замыкает другой.
Н

а рис.47,
б приведены схема и размерные характеристики реле
«Мобрей», а в табл.5 их значения. Уровень регулирования можно установить, размещая ограничители. При техническом обслуживании реле уровня необходимо осматривать и очищать. Для этого отключают подачу тока и изолируют концы, снимают выключатель в резервуаре или камере, удаляют осадок, отложения, а с магнита поплавка — нагоревшие металлические частицы.
Н
а рис.48,
а приведены размерные характеристики реле уровня
«Беста», аналогичного реле
«Мобрей», в табл.6 — численные значения характеристик. На рис.48,
б показаны внешние виды двух модификаций реле.
Какое назначение поплавкового реле типа CPM-2S?
Датчик поплавково-магнитный с удлиненным ходом типа CPM-2S (рис.49) служит для сигнализации уровня жидкостей, в том числе топлива и масла, в открытых и напорных резервуарах, а также в паровых котлах во взрывобезопасной атмосфере (относится к окружающей среде резервуара).
Датчик поплавково-магнитный CPM-2S состоит из следующих основных узлов: поплавка, контактного триггера, корпуса. Поплавок в виде плотного сосуда круглого сечения соединен шарнирно при помощи рычага с кронштейном, в котором установлены плотно постоянные магниты. Этот узел крепится при помощи оси в той части корпуса, которая находится внутри резервуара. Штифты, установленные в кронштейне, позволяют четырех ступенчато изменять ход поплавка.
Рычаг является сменным элементом. Удлиняя рычаг, увеличивают ход поплавка, сокращая, — уменьшают. Наружная часть корпуса представляет собой камеру, отделенную тонкой стенкой от резервуарной части. В камере находится в изоляционной колодке узел контактного триггера.
Что представляет собой уровнемер АТМ?
Уровнемер АТМ предназначен для дистанционного замера уровня в судовых танках. Принцип действия — гидростатический. Прибор можно использовать для следующих жидкостей: морской и пресной воды, дизельного и тяжелого топлива, смазочного масла.
Система АТМ состоит из двух объединенных блоков. Индикаторный блок включает в себя измерительный элемент, мембрану с механической защитой от избыточного давления; регулировку нулевой точки на лицевой панели прибора; шкалу, указывающую уровень, объем или массу. Блок управления состоит из блочного регулятора постоянного расхода воздуха, винта регулировки количества воздуха, продувочного вентиля и штуцера питания, индикации и контроля.
Уровнемер АТМ может работать в диапазоне рабочих давлений 0,1-3,0 МПа и при погрешности измерения ±1% максимального уровня.
Д
ля работы уровнемера требуется рабочий воздух в количестве 0,5л\мин при давлении 5,0 МПа.
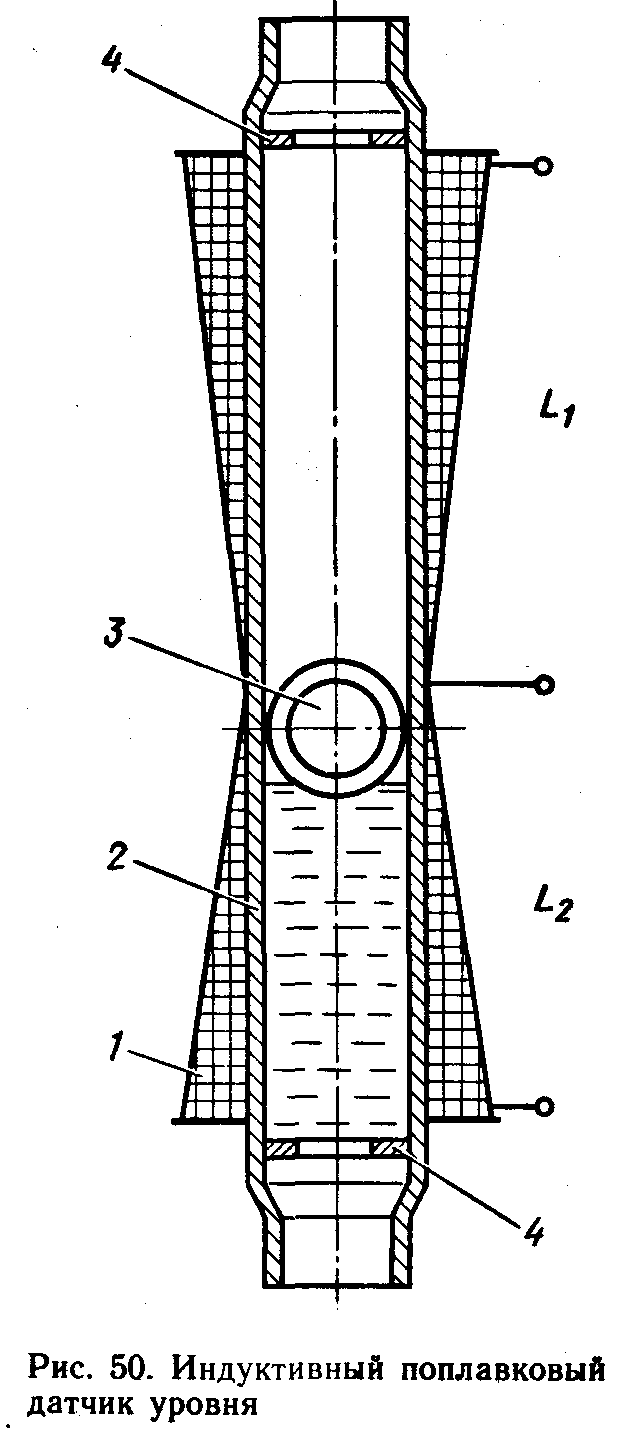
Как действует индуктивный поплавковый датчик уровня?
Схема датчика рассматриваемого типа показана на рис.50. Датчик имеет поплавковую камеру
2, выполненную из немагнитной стали. Камера соединяется с резервуаром, уровень жидкости в котором контролируется. Снаружи поплавковой камеры расположены две катушки
1, имеющие коническую форму. Внутри нее находится, сферический поплавок
3 из магнитной стали, который перемещается в зависимости от уровня жидкости в камере. Перемещение поплавка приводит к изменению индуктивностей
L1 и
L2 катушек. Благодаря пружинным кольцам
4 поплавок не может выйти из зоны катушек. Коническая форма катушек позволяет получить линейный закон изменения их индуктивностей при перемещениях поплавка. Рассмотренный датчик представляет собой реверсивный индуктивный преобразователь. Индуктивные поплавковые датчики нашли применение в автоматических системах измерения и поддержания уровня жидких хладагентов судовых холодильных установок. Диапазон измерения уровня жидкости равен 0,4 метра.
Что представляет собой поплавковое реле ПРУ-5М?
П

ринцип работы реле основан на получении сигнала небаланса моста переменного тока при изменении индуктивного сопротивления катушек датчика, включенных в плечи моста преобразователя
4 (рис.51). Индуктивное сопротивление катушек изменяется сферическим сердечником-поплавком
3, свободно перемещающимся вместе с уровнем жидкости в поплавковой камере датчика, которая может быть отключена от резервуара
1 с помощью клапана
2. Поплавковая камера по принципу сообщающихся сосудов соединяется с резервуаром
1, в котором контролируется уровень жидкости. Состояние контакта выходного реле зависит от положения уровня контролируемой жидкости.
Во всех случаях, когда контролируемая жидкость находится выше верхнего уровня срабатывания, выходное реле включено, если же жидкость опускается ниже нижнего уровня срабатывания, выходное реле выключено. Если уровень жидкости находится между верхним и нижним уровнями срабатывания, то выходное реле может быть включено или выключено. Это зависит от положения предшествующего уровня контролируемой жидкости.
Периодически через 5тыс.ч эксплуатации (или 2 раза в год) рекомендуется производить следующие работы:
снаружи осматривать реле уровня;
проверять сопротивление изоляции;
заменять поплавок и прокладку в контр фланцах (при необходимости);
чистить поплавковую камеру датчика;
проверять состояние контактов выходного реле (при необходимости — зачищать), деталей (качество поверхностей и зазоров), обеспечивающих взрывобезопасность, отсутствие забоин и царапин на взрывозащитных поверхностях, заземление, крепление крышки, уплотнение ввода кабеля; зазоры между контактами колодки, выводами преобразователя 4 и усилителя 5.
Какие характеристики полупроводниковых реле типа ПРУ?
Наряду с механическими и электромеханическими реле в судовых установках применяют полупроводниковые и электронные реле.
Ряд полупроводниковых реле типа ПРУ используют в качестве сигнализаторов уровня, которые имеют следующие характеристики:
погрешность срабатывания +15 мм, потребляемую мощность 5 Вт, массу 3-12 кг, температуру контролируемой среды — 70-180°С.
Как действует система индикации уровня СУМ-21?
Система индикации СУМ-21 предназначена для измерения уровня в грузовых танках судна и емкостях на берегу, в которых могут быть помещены такие жидкости, как сырая нефть, нефтепродукты, вода и другие, радиолокационным методом. С помощью СУМ-21 данные показываются на стрелочном приборе и передаются на другие блоки. Систему можно устанавливать на палубе, поэтому ее техническое обслуживание не вызывает трудностей.
Система индикации уровня СУМ-21 не должна иметь контакта с измеряемым веществом. Ультразвуковой метод дает ограниченную точность, потому что скорость звука меняется в зависимости от температуры среды и смеси газов в среде. Для оптического метода требуется прозрачная среда, что не всегда можно обеспечить. Радиолокационный метод не зависит от температуры, состава, давления среды. Отражение происходит на самой поверхности независимо от состава жидкости и плотности.
Из каких компонентов состоит система СУМ-21?
С
истема СУМ-21 состоит из 38 датчиков и центрального устройства. Датчики монтируются на фланце крышки танка и соединяются с центральным устройством кабелем. Каждый датчик подсоединен своим кабелем. Электроника датчиков собирается в заменяемых прочных кассетах. В датчике радиолокационный передатчик направляет луч на поверхность жидкости, от которой он отражается и улавливается системой. Расстояние измеряется методом частотно-модулированной непрерывной волны, который часто используется в радиолокаторе. Радиолокационный передатчик дает выходной сигнал с постоянной амплитудой, но переменной частотой.
В микро ЭВМ вычисляется частное между двумя импульсными частотами. Далее оно пересчитывается на незаполненный объем танка, и результат представляется цифрами и в аналоговом виде. Шкалы показывающего прибора имеют деление 1 м в диапазоне 0-30 м или 0,1 м в диапазоне 0-3 м. Максимальная погрешность составляет ±(5+H/2000)мм,
где Н — расстояние
антенна — поверхность жидкости, мм.
Скорость измерения на стоянке 50 раз/мин, во время шторма на море она снижается.
Как используется свойство электропроводимости жидкости для измерения уровня?
Свойство электропроводимости жидкости используется только в сигнализаторах предельных значении уровня. Ограниченная область применения объясняется тем, что в судовых условиях трудно избежать загрязнения зонда, что значительно изменяет сопротивление между чувствительным элементом и стенкой резервуара.
Применяются ли емкостные датчики для измерения уровня?
Емкостные датчики нашли широкое распространение для измерения уровня жидкости в танках. Датчик может иметь один или два электрода, в последнем случае роль одного электрода играет стенка танка. Второй электрод должен быть изолирован от токопроводящей жидкости. Принцип действия датчика основан на изменении емкости пластинчатого конденсатора в зависимости от расстояния (в данном случае уровня) между электродами.
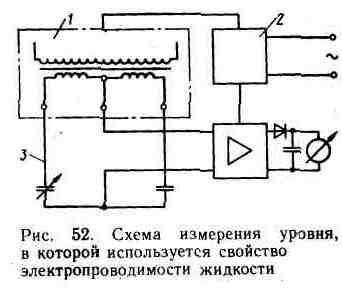
Как действует схема измерения уровня, в которой используется свойство электропроводимости жидкости?
Для измерения уровня используется мостиковая схема (рис.52). В генераторе частоты
1 вторичная обмотка трансформатора, разделенная на две симметричные части, образует одну ветвь моста.
Во второй ветви находится конденсатор
С и измерительного зонда
3 и нормальный
Сн конденсатор. Последний подбирается так, чтобы его емкость равнялась емкости конденсатора зонда,
В схему включен блок питания
2. По мере увеличения уровня в танке напряжение в диагонали моста будет возрастать пропорционально уровню. В случае, если уровень должен измеряться непрерывно, зонд располагают по всей высоте танка. Для сигнализации предельных значений зонды располагаются горизонтально на заданных уровнях. Напряжение датчика зависит от диэлектрических свойств материала, поэтому данный зонд следует применять только для одной жидкости. В танках, где сорт жидкости может меняться, для каждой жидкости предусматривают свой зонд.
Часто ли применяют датчики уровня с радиоактивными изотопами?
Датчики с радиоактивными изотопами (-излучение) применяют редко, так как они дороги и при работе с ними необходимы средства защиты. Принцип действия датчиков основан на поглощении излучения в зависимости от толщины слоя.
Датчики с лотом (поплавком), имеющим моторный привод, дают очень точное измерение, но наличие многих подвижных частей может снизить эту точность.
Каковы параметры сигнализатора уровня жидких диэлектрических сред типа СУС-16?
Параметры сигнализатора уровня типа СУС-10 следующие:
температура контролируемой среды от -100 до +100°С при давлении 4 МПа; длина погружаемой части первичного преобразователя 0,1; 0,25; 0,6; 1,0; 1,6; 2,0 м;
потребляемая мощность не более 15ВА;
диэлектрическая проницаемость (относительная) контролируемой среды 2.
 Скачать 2.78 Mb.
Скачать 2.78 Mb.
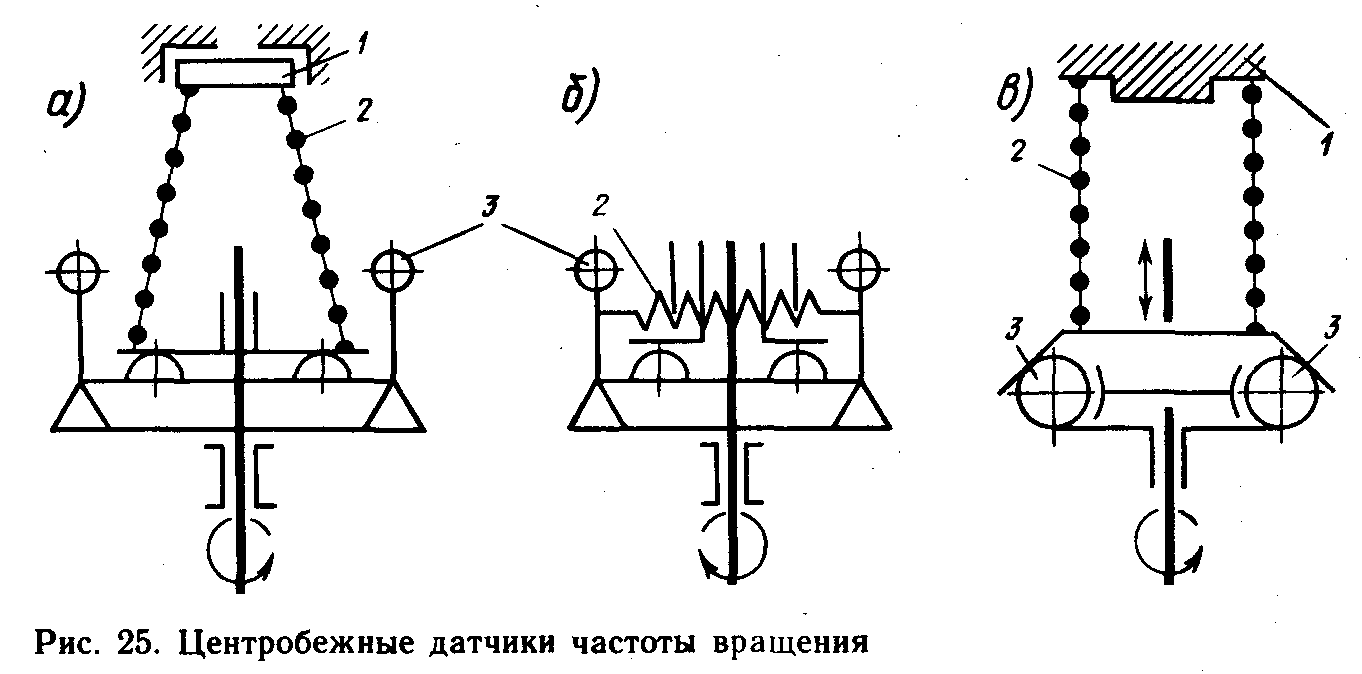 главных и вспомогательных турбинах двигателя, турбогенераторах применяют разные по принципу действия и устройства регуляторы частоты вращения, что и обусловливает конструктивное разнообразие датчиков частоты вращения, устанавливаемых в судовых системах.
главных и вспомогательных турбинах двигателя, турбогенераторах применяют разные по принципу действия и устройства регуляторы частоты вращения, что и обусловливает конструктивное разнообразие датчиков частоты вращения, устанавливаемых в судовых системах. то представляют собой тахогенераторы?
то представляют собой тахогенераторы?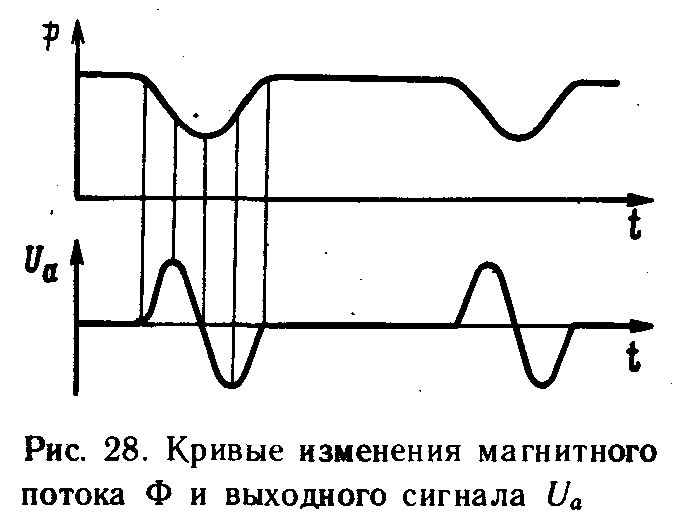 вращающейся деталью соединено кольцо из ферромагнитного материала, имеющее вырез. Вблизи кольца устанавливается головка датчика с катушкой (рис.27,а,б). Благодаря вырезу магнитный поток Ф изменяется, вследствие чего в катушке датчика индуцируются импульсы напряжения. Частота импульсов равна частоте вращения детали. Амплитуда импульсов напряжения Va тем больше, чем меньше воздушный зазор между кольцом и датчиком и чем больше скорость прохождения выреза мимо головки датчика. Конструкция импульсного датчика показана на рис.28.
вращающейся деталью соединено кольцо из ферромагнитного материала, имеющее вырез. Вблизи кольца устанавливается головка датчика с катушкой (рис.27,а,б). Благодаря вырезу магнитный поток Ф изменяется, вследствие чего в катушке датчика индуцируются импульсы напряжения. Частота импульсов равна частоте вращения детали. Амплитуда импульсов напряжения Va тем больше, чем меньше воздушный зазор между кольцом и датчиком и чем больше скорость прохождения выреза мимо головки датчика. Конструкция импульсного датчика показана на рис.28.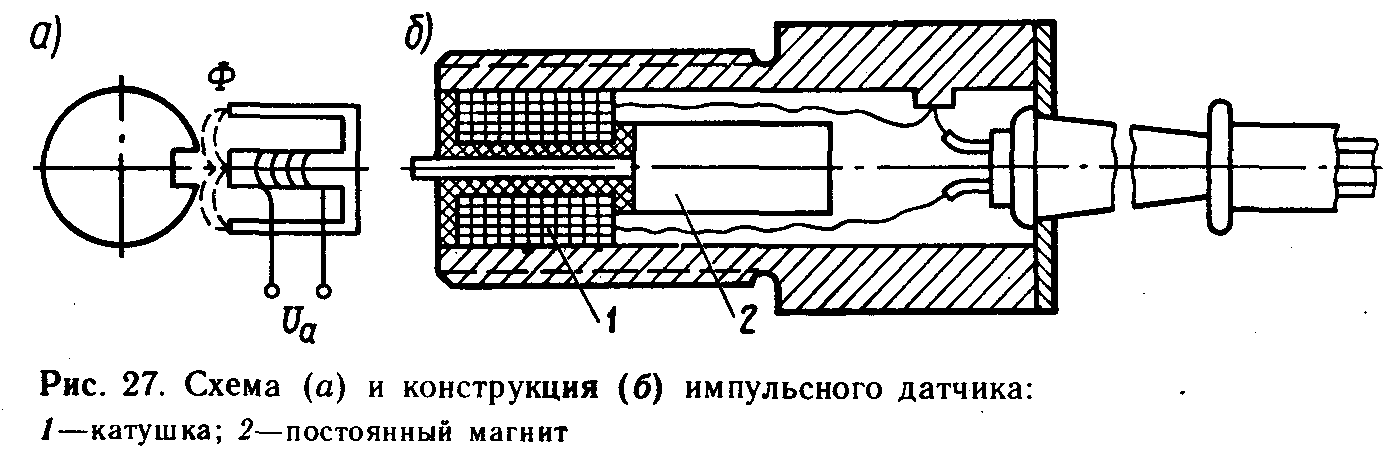 место кольца с вырезом могут применяться шайбы с несколькими вырезами или кулачками, а также шестерни. Количество вырезов или кулачков выбирают в соответствии со значением измеряемой частоты вращения, чтобы со считывание импульсов было надежным, без «пропусков». Вырезы или кулачки располагают симметрично. Воздушный зазор принимают в диапазоне 0,3-0,8 мм.
место кольца с вырезом могут применяться шайбы с несколькими вырезами или кулачками, а также шестерни. Количество вырезов или кулачков выбирают в соответствии со значением измеряемой частоты вращения, чтобы со считывание импульсов было надежным, без «пропусков». Вырезы или кулачки располагают симметрично. Воздушный зазор принимают в диапазоне 0,3-0,8 мм.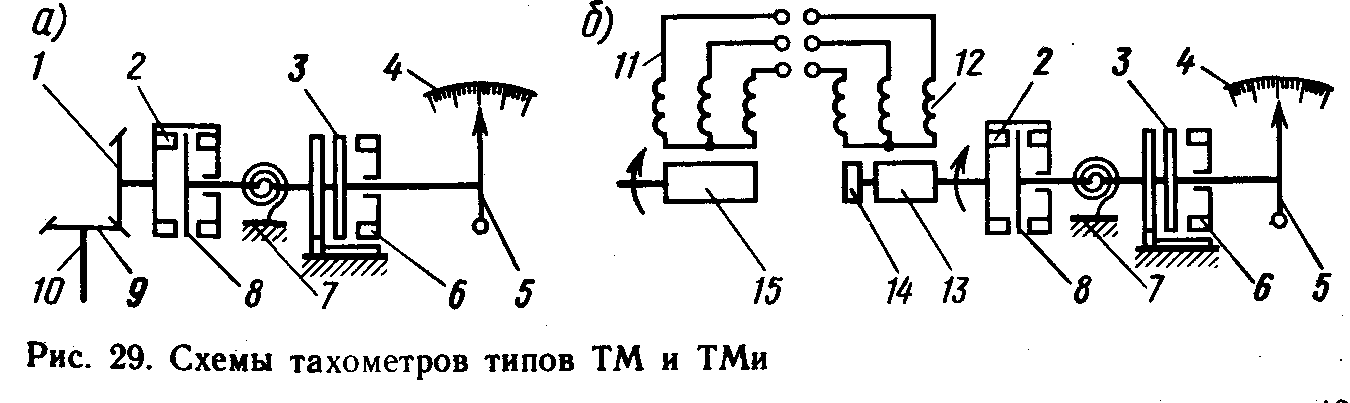 реобразование частоты вращения вала в угловое перемещение стрелки магнитно-индукционным измерительным узлом основано на взаимодействии магнитного поля вращающихся постоянных магнитов с индукционными токами, наведенными этим полем в металлическом диске.
реобразование частоты вращения вала в угловое перемещение стрелки магнитно-индукционным измерительным узлом основано на взаимодействии магнитного поля вращающихся постоянных магнитов с индукционными токами, наведенными этим полем в металлическом диске.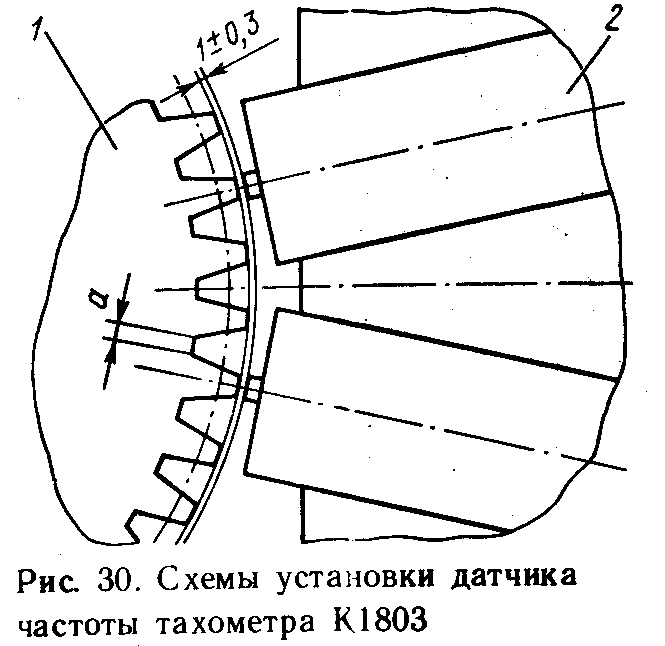
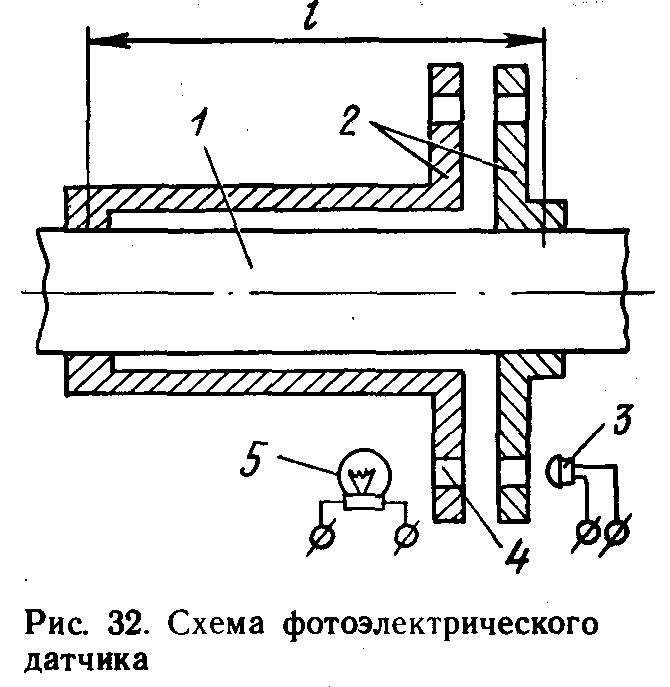 ринцип действия фотоэлектрических датчиков основан на измерении интенсивности светового потока, идущего от источника (рис.32) к фотоэлементу. Интенсивность пучка света, попадающего на приемник 3, зависит от угла скручивания вала и крутящего момента. Происходит это следующим образом: на валу 1 на расстоянии l насажаны два диска 2, отверстия 4 в которых совпадают, если вал не испытывает скручивания. В противном случае соосность отверстий нарушается, и поток света, идущий от лампы 5 к фотоэлементу 3, уменьшается. Вследствие чего изменяется сила тока на выходе фотоэлемента. Выходной сигнал с элемента 3 поступает в усилитель.
ринцип действия фотоэлектрических датчиков основан на измерении интенсивности светового потока, идущего от источника (рис.32) к фотоэлементу. Интенсивность пучка света, попадающего на приемник 3, зависит от угла скручивания вала и крутящего момента. Происходит это следующим образом: на валу 1 на расстоянии l насажаны два диска 2, отверстия 4 в которых совпадают, если вал не испытывает скручивания. В противном случае соосность отверстий нарушается, и поток света, идущий от лампы 5 к фотоэлементу 3, уменьшается. Вследствие чего изменяется сила тока на выходе фотоэлемента. Выходной сигнал с элемента 3 поступает в усилитель.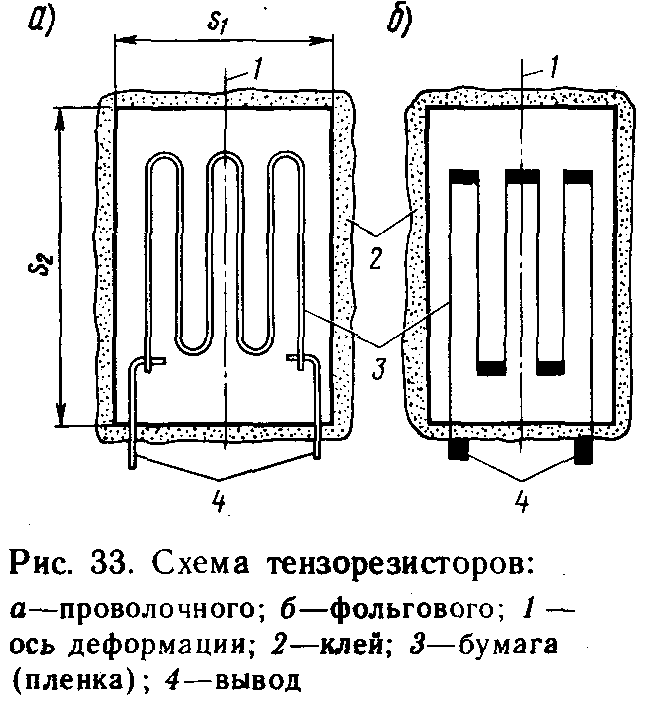 ензорезисторы могут быть выполнены из проволоки и фольги. Конструктивно проволочный тензорезистор (рис.33) представляет собой решетку из проволоки диаметром 0,01-0,05 мм, уложенную зигзагообразно на длине S2 и ширине S1 между двумя электроизоляционными подложками. К концам проволоки присоединены выводные концы. Электроизоляционные подложки выполняют из папиросной бумаги, лаковой пленки или цемента, скрепляемых между собой клеем, лаком или цементом. Зигзагообразную часть тензорезистора называют решеткой. Проволочные тензорезисторы выполняют сопротивлением 10-100 Ом. Они имеют размеры 2-100 мм.
ензорезисторы могут быть выполнены из проволоки и фольги. Конструктивно проволочный тензорезистор (рис.33) представляет собой решетку из проволоки диаметром 0,01-0,05 мм, уложенную зигзагообразно на длине S2 и ширине S1 между двумя электроизоляционными подложками. К концам проволоки присоединены выводные концы. Электроизоляционные подложки выполняют из папиросной бумаги, лаковой пленки или цемента, скрепляемых между собой клеем, лаком или цементом. Зигзагообразную часть тензорезистора называют решеткой. Проволочные тензорезисторы выполняют сопротивлением 10-100 Ом. Они имеют размеры 2-100 мм.
 а концах участка вала длиной L устанавливают два тахогенератора переменного тока по возможности с одинаковыми зависимостями напряжения от частоты вращения. Передаточное отношение i и число пар полюсов р также должны быть одинаковыми. Получают два напряжения, пропорциональные частоте вращения.
а концах участка вала длиной L устанавливают два тахогенератора переменного тока по возможности с одинаковыми зависимостями напряжения от частоты вращения. Передаточное отношение i и число пар полюсов р также должны быть одинаковыми. Получают два напряжения, пропорциональные частоте вращения.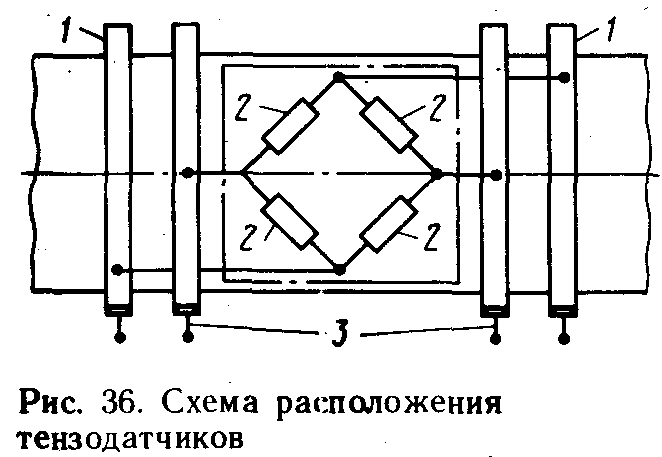
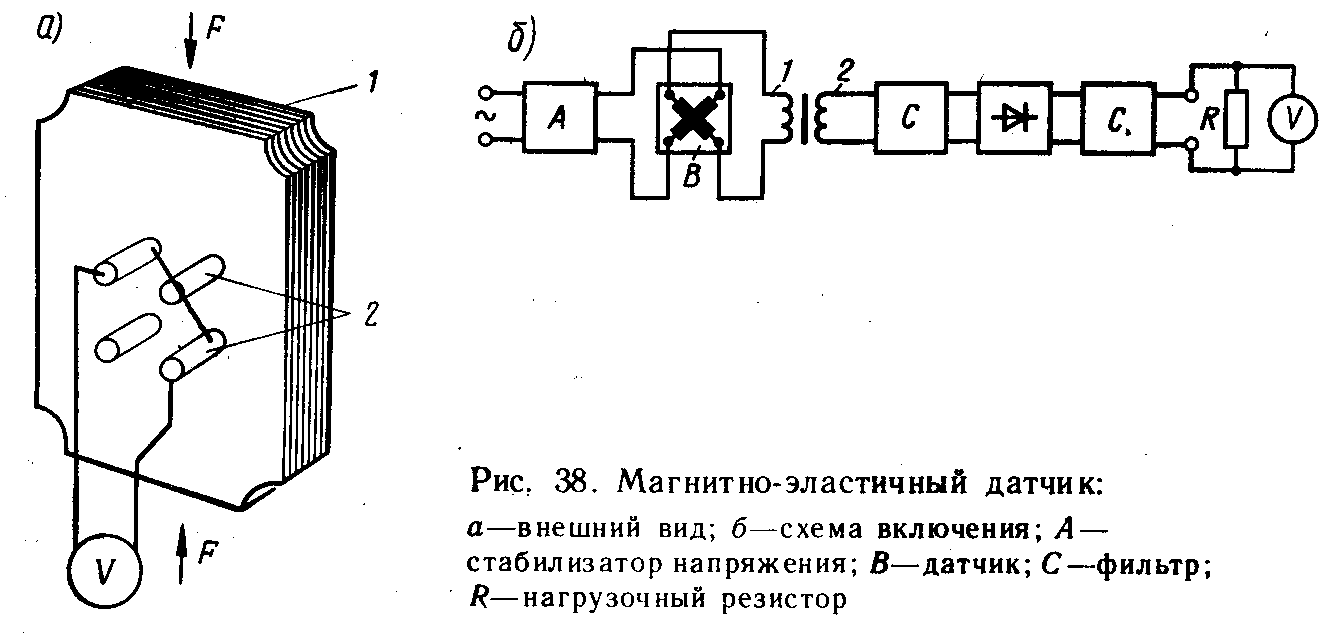 ринцип измерения основан на зависимости коэффициента проницаемости Хи ферромагнитного материала от механического напряжения. В направлении действия силы коэффициент проницаемости материала уменьшается, в перпендикулярном направлении немного увеличивается. При изменении направления силы на противоположное происходит обратное явление. На рис.38, а показано сечение магнитно-эластичного датчика по одной из пластин железа 1. Между отверстиями 2, через которые проходят витки обмоток, в направлении действия силы F образуется разгруженная зона.
ринцип измерения основан на зависимости коэффициента проницаемости Хи ферромагнитного материала от механического напряжения. В направлении действия силы коэффициент проницаемости материала уменьшается, в перпендикулярном направлении немного увеличивается. При изменении направления силы на противоположное происходит обратное явление. На рис.38, а показано сечение магнитно-эластичного датчика по одной из пластин железа 1. Между отверстиями 2, через которые проходят витки обмоток, в направлении действия силы F образуется разгруженная зона.
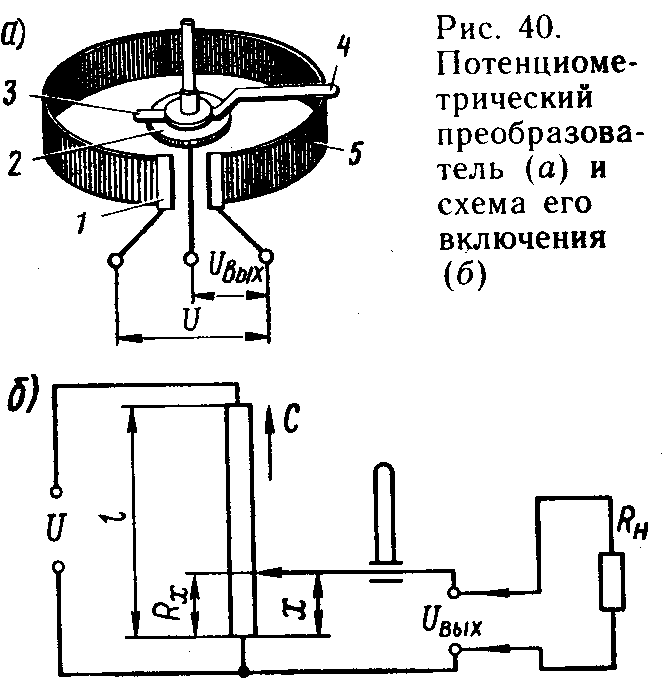 золяции контактной дорожке обмотки перемещается движок 4, выполненный в виде упругой пластины или нескольких проволочек различной длины, сложенных вместе. Движок соединен щеткой 3 с токосъемным кольцом 2.
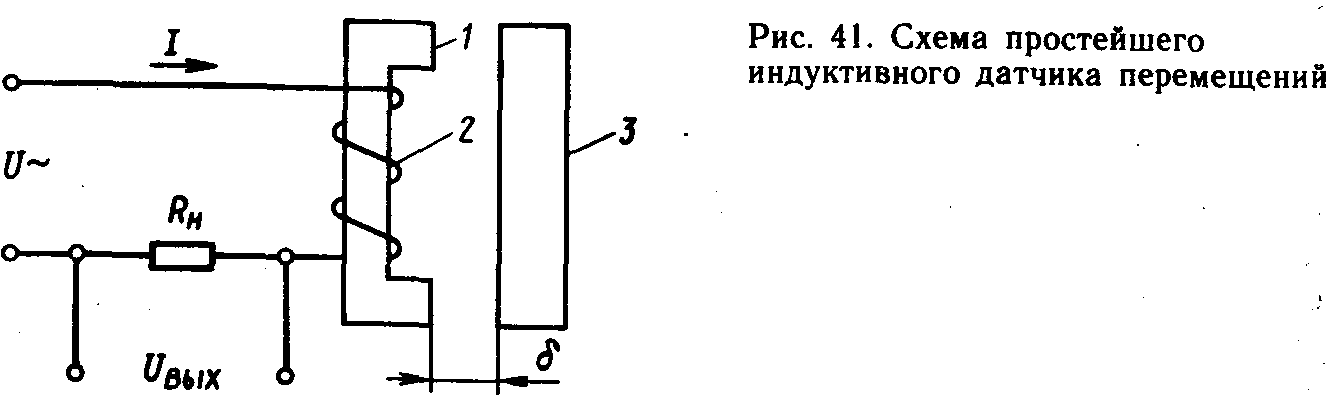
золяции контактной дорожке обмотки перемещается движок 4, выполненный в виде упругой пластины или нескольких проволочек различной длины, сложенных вместе. Движок соединен щеткой 3 с токосъемным кольцом 2.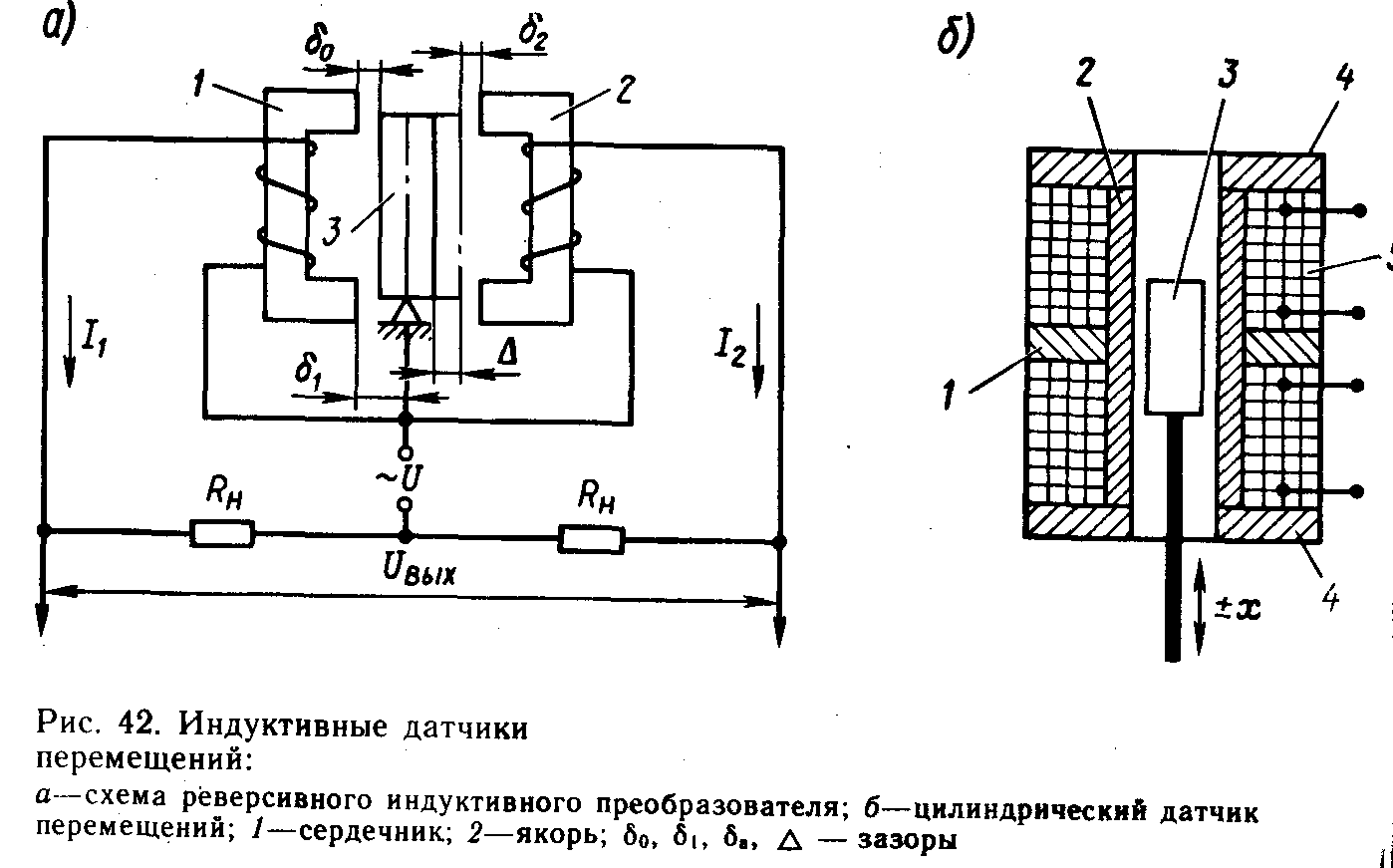 агнитный поток катушки проходит через железный сердечник 1, сердечник 3 и воздушный зазор 6. При перемещении сердечника изменяется воздушный зазор 6, а следовательно, и самоиндукция L катушки 2 (рис.41). Преимущество индуктивных датчиков — они не изнашиваются и имеют большую чувствительность. Основной недостаток — пропорциональная зависимость между изменением индуктивности ΔL и перемещением Δδ сохраняется только в определенных небольших пределах. В большинстве случаев применяют два индуктивных датчика с одним общим якорем. Датчики включены в мостовую цепь таким образом, что при увеличении самоиндукции одного датчика самоиндукция другого уменьшается (рис.42,а). Для измерения больших перемещений применяют цилиндрические реверсивные индуктивные преобразователи (рис.42,б). Магнитопровод преобразователя 2 изготовлен в виде цилиндрической трубки, которая вместе с двумя крышками 4 является ярмом. Якорь 3 имеет цилиндрическую форму. Диск 1 из ферромагнитного материала предназначен для увеличения магнитной проводимости. По обе стороны от диска установлены две цилиндрические катушки 5.
агнитный поток катушки проходит через железный сердечник 1, сердечник 3 и воздушный зазор 6. При перемещении сердечника изменяется воздушный зазор 6, а следовательно, и самоиндукция L катушки 2 (рис.41). Преимущество индуктивных датчиков — они не изнашиваются и имеют большую чувствительность. Основной недостаток — пропорциональная зависимость между изменением индуктивности ΔL и перемещением Δδ сохраняется только в определенных небольших пределах. В большинстве случаев применяют два индуктивных датчика с одним общим якорем. Датчики включены в мостовую цепь таким образом, что при увеличении самоиндукции одного датчика самоиндукция другого уменьшается (рис.42,а). Для измерения больших перемещений применяют цилиндрические реверсивные индуктивные преобразователи (рис.42,б). Магнитопровод преобразователя 2 изготовлен в виде цилиндрической трубки, которая вместе с двумя крышками 4 является ярмом. Якорь 3 имеет цилиндрическую форму. Диск 1 из ферромагнитного материала предназначен для увеличения магнитной проводимости. По обе стороны от диска установлены две цилиндрические катушки 5.