Группа ГАЗ и решения автоматизации подвижного транспорта. РЕФЕРАТ. Автоматизация
 Скачать 2.44 Mb. Скачать 2.44 Mb.
|

|
Автоматизация Идея автоматизации управления не является новой для транспортной отрасли. Системы автоматизации управления транспортным средством сегодня широко распространены в авиации, на железнодорожном транспорте, в складской логистике. Во многих городских метро и аэропортах применяются беспилотные поезда. Созданы беспилотные транспортные средства для использования в условиях опасных и тяжёлых производств, например, при добыче ископаемых в шахтах и карьерах или в условиях сельскохозяйственной отрасли, где у транспортных средств не возникает тех сложностей, которые свойственны дорогам общего пользования. Сама идея создания беспилотного транспорта имеют давнюю историю. Ещё в конце 40-х годов XX в. в компании General Motors обсуждались вопросы автоматизированного движения. В качестве инструмента управления рассматривались провода переменного тока, встроенные в дорожное полотно. Осуществляя движение над ними, автомобиль мог получать сигнал через катушку индуктивности [79]. В конце 1970-х годов появились цифровые камеры и начала развиваться компьютерная обработка видеоизображений, в 1980-1990 гг. скорость и качество обработки резко повысились (во многом этому способствовало динамичное развитие и рост популярности видеоигр). Этот период времени определил вектор развития автономного транспорта. К концу 1980-х годов стали появляться прототипы беспилотных автомобилей, основанных на цифровой электронике [79]. В 2000-х годах прогресс в развитии микроэлектроники и видеопроцессоров способствовал прорыву в сфере автономного транспорта. В это время ведущие университеты мира начали соперничать в разработках прототипов беспилотных автомобилей, чему во многом способствовали крупные государственные гранты США. В 2004 году Агентством перспективных проектов Пентагона (DARPA) было объявлено о первомсоревновании полностью автономных автомобилей, для которых устанавливалось задание: преодолеть 230 км трассу без вмешательства человека. В этом конкурсе победитель не был установлен (никто не добрался до финиша), а в 2005 году победитель гонки DARPA стала команда, представлявшая Стэнфордский университет [79]. Характеризуя современное состояние и планы развития автономного транспорта важно заметить, что большинство крупных автопроизводителей по состоянию на 2019 год объявило о намерении в течение всего нескольких лет выпустить свою модель беспилотного автомобиля. Существующие сегодня автомобили разных уровней автономности находятся в стадиях исследований / испытаний на дорогах общего пользования. Появление этой вехи в беспилотном вождении стало возможно за счёт постепенного создания и внедрения компаниями инноваций в выпускаемые ими транспортные средства. Так, уже более десяти лет существуют различные системы / функции помощи водителю (ADAS), которые встраиваются компаниями в серийных выпуск автомобилей. В таблице 1 отражены ключевые достижения и планы крупнейших автопроизводителей мира в сфере автоматизации вождения. Табл. 1. Достижения и планы крупнейших автопроизводителей мира
Эффективное функционирование транспортных средств с различной степенью автоматизации движения возможно за счёт работы специального компьютерного ПО, а также различных систем и датчиков, некоторые из которых отображены на рис. 1. На настоящий момент времени существует несколько классификаций уровней автономности автомобиля относительно степени вовлечённости водителя в управление. Наибольшее распространение получила классификация, предложенная в 2014 году профессиональным сообществом автомобильным инженеров (SAE) в техническом стандарте J3016 (его обновление осуществлялось дважды – в 2016 и 2018 году). Данная классификация стала со временем общепринятой как среди бизнеса (автопроизводители, IT-компании, инвесторы), так и в различных странах мира (национальные правительства, регуляторы). 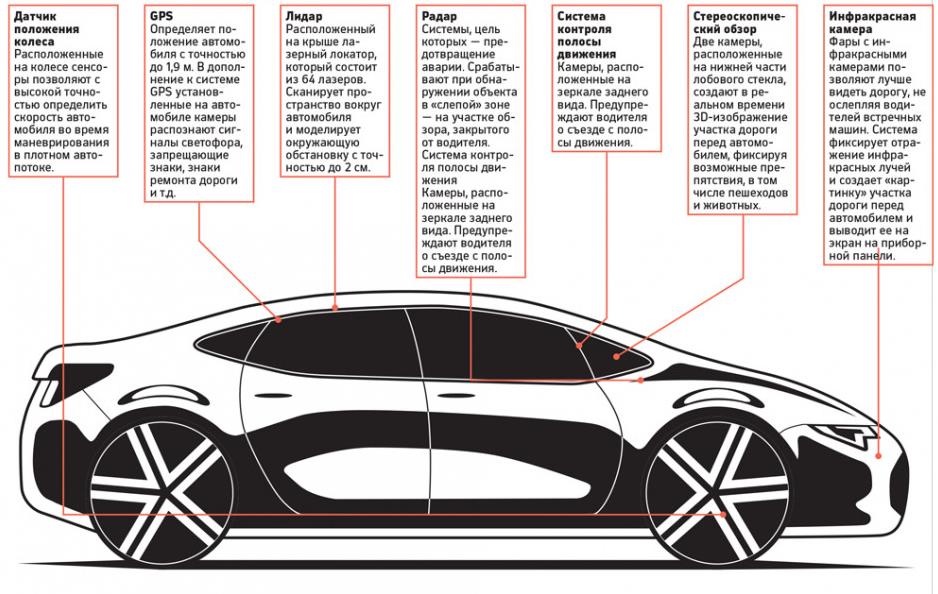 Рис. 1. Датчики и системы, обеспечивающие работу автономного автомобиля Источник: Teslamotors, РБК Согласно SAE, выделены шесть уровней автономности автомобиля: от её отсутствия (нулевой уровень) до полной автономности (пятый уровень). В основе каждого из уровней лежит вопрос решения так называемой «задачи динамического вождения» (Dynamic Driving Task, DDT), её можно интерпретировать, как задачу фактического управления транспортным средством. Рассмотрим более подробно каждый из уровней автономности [178; 179]: 1. SAE 0. Нулевой уровень / Отсутствие автономности. К данному уровню относятся автомобили, в которых управление находится исключительно в сфере ответственности человека, даже с учётом установленных систем активной безопасности (антиблокировочная, экстренного торможения и др.) – данные системы не автоматизируют решение DDT на постоянной основе. 2. SAE 1. Первый уровень / Помощь водителю. Управление автомобилями первого уровня также осуществляется человеком, ему доступны функции помощи водителю в части руления или торможения / ускорения. Эти функции (например, адаптивный круиз-контроль) обеспечивают лишь частичную автоматизацию в решении DDT и человек, при их активации, должен быть готов взять управление в свои руки. 3. SAE 2. Второй уровень / Неполная автономность. Ко второму уровню автономности относятся автомобили также с частичной автоматизацией решения DDT, когда водитель может активировать функции помощи в рулении, а также функции помощи в торможении / ускорении. При этом он обязан осуществлять постоянный мониторинг за движением транспортного средства и в случае опасности / нестандартной ситуации взять управление в свои руки. 4. SAE 3. Третий уровень / Условная автономность. Автомобили третьего уровня автономности отличаются от второго уровня в степени готовности человека переключить управление на себя. Если на втором уровне она может характеризоваться как практически мгновенная, то на третьем уровне степень готовности рассматривается как резервная (в случае оповещения системой автономного вождения человек должен взять управление в свои руки). 5. SAE 4. Четвёртый уровень / Высокая автономность. К четвёртому уровню автономности относятся автомобили, управление которыми со стороны человека не требуется, также, как и не требуется его активная готовность переключить управление на себя. Несмотря на то, что решение задачи динамического вождения полностью автоматизировано, функционирование транспортных средств четвёртого уровня автономности возможно лишь при определённых условиях (например, в локальных границах, климатических зонах и др.). 6. SAE 5. Пятый уровень / Полная автономность. Автомобили пятого уровня автономности характеризуются абсолютной автономностью в решении задачи динамического вождения без необходимости задействования человека. При этом такие автомобили могут осуществлять движение при любых условиях, связанных с местностью и погодными условиями. Все рассмотренные уровни автономности автомобиля схематично представлены на рис. 2. 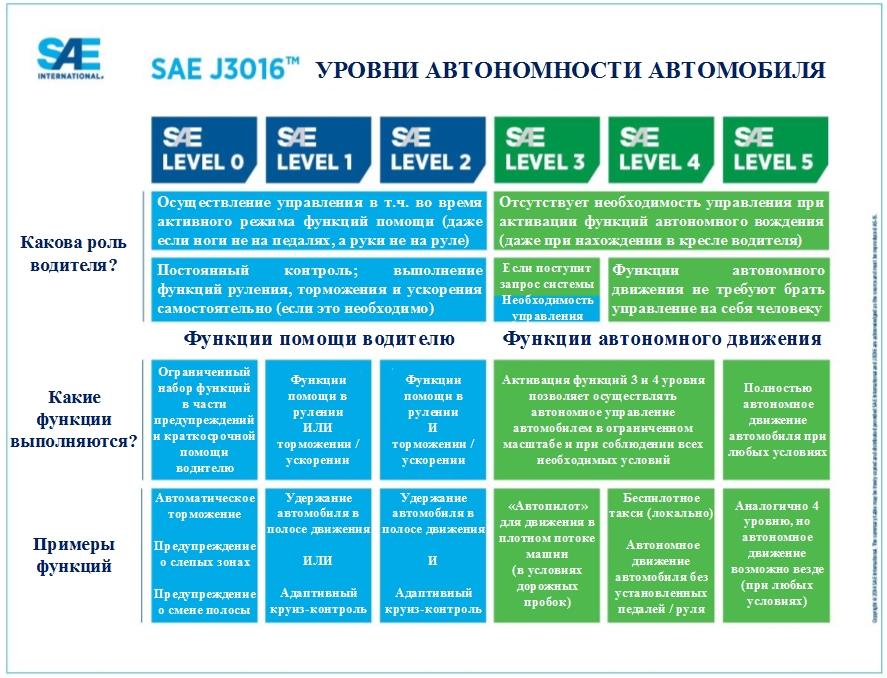 Рисунок 2 – Уровни автономности автомобилей Разработкой беспилотных систем сегодня занимаются все автопроизводители без исключения. Перспективность этого направления исследований стоит на втором месте после разработки электромобилей, а возможно и на первом. Многие полагают, что автономные транспортные системы появились совсем недавно. Это не так. В логистике такие машины используются по крайней мере лет 30. Конечно, это совсем другие схемы и принципы транспортировки, но тем не менее, опыт накапливается. На днях «Группа ГАЗ» объявила, что создала беспилотный автомобиль поколения 4+. Программу по созданию беспилотного транспорта «Группа ГАЗ» реализует с 2014 года. За это время были изучены и протестированы все возможные технологии, позволяющие двигаться автомобилю самостоятельно и при этом выполнять реальные транспортные задачи. За прошедших шесть лет были созданы беспилотные автомобили, имеющие оригинальную систему распознавания разметки и объектов дорожной инфраструктуры. В настоящий момент в компании проходят испытания несколько беспилотных автомобилей. В них реализованы инновационные инженерные решения, которые не требуют присутствия водителя за рулём во время движения по заданному маршруту. Если же водитель всё же присутствует в кабине, то его функции управления автомобилем благодаря автоматизированной системе помощи водителю ADAS максимально облегчены. Главное условие автономного движения по дорогам общего пользования – взаимный обмен информацией машинами. Примерную схему вы можете увидеть на рисунке 3  Рисунок 3 – Схема обмена информацией между автомобилями Пусть к автоматизации Установление требований безопасности и соответствующих методов оценки соответствия колесных транспортных средств с высокой степенью автоматизации управления или закрепление соответствующих принятых международных требований в части: а) системы опережающего экстренного торможения с функциями распознания неподвижного и подвижного транспортного средства, пешехода, велосипедиста; б) системы предупреждения о выходе из полосы движения; в) адаптивного круиз-контроля при движении на высокой скорости; г) системы распознания дорожных знаков с информированием водителя; д) автоматического переключения света фар; е) системы мониторинга давления воздуха в шинах; ж) системы мониторинга осевой нагрузки; з) системы записи параметров движения ("черный ящик") Определение перечня стандартов, в результате применения которых на добровольной основе обеспечивается соблюдение требований технического регламента Таможенного союза "Безопасность автомобильных дорог", и перечня стандартов, содержащих правила и методы исследований (испытаний) и измерений, в том числе правила отбора образцов, необходимые для применения и исполнения требований технического регламента Таможенного союза "Безопасность автомобильных дорог" и осуществления оценки соответствия объектов технического регулирования в части элементов дорожной инфраструктуры, обеспечивающих эксплуатацию на автомобильных дорогах колесных транспортных средств с высокой степенью автоматизации управления 48. Установление требований к минимальной функциональности систем помощи водителю при удержании полосы движения (LKAS), устанавливаемым на транспортные средства категорий M и N, определение эксплуатационных требований к данным системам и процедур испытаний 50.Установление определения системы предупреждения ухода с полосы движения, устанавливаемой на колесные транспортные средства категорий M1, M2, М3, N1 и N2, установление классификации таких систем, определение минимальных требований к функциональности данных систем, установление требований к человеко-машинному интерфейсу (HMI) и определение методов испытаний таких систем 51. Установление минимальных требований к функциональности систем помощи водителю при принятии решения при смене полосы движения (LCDAS), устанавливаемых на транспортные средства категорий M и N, определение требований к эксплуатации таких систем, установление требований к методам испытаний данных систем 55. Установление требований в отношении сетевого взаимодействия транспортных средств с высокой степенью автоматизации управления между собой (V2V) 56. Установление требований в отношении сетевого взаимодействия транспортных средств с высокой степенью автоматизации управления c инфраструктурой (V2I) 58. Установление требований к минимальной функциональности систем следования за медленно движущимся транспортным средством (LSF), устанавливаемых на транспортные средства категорий M и N, определение эксплуатационных требований к данным системам и процедур испытаний 59. Установление требований безопасности в отношении инновационных транспортных средств, а также критериев отнесения колесных транспортных средств к категории инновационных транспортных средств, требований к инновационным транспортным средствам, правил и методов исследований (испытаний) инновационных транспортных средств Трудности автономии Проект для «Группы ГАЗ» настолько важен, что для его разития она построила специальный полигон, имитирующий городскую среду. Установлены дорожные знаки, пешеходные переходы, светофоры, есть зоны с круговым движением и парковки. Там и проводятся все испытания беспилотных автомобилей. На полигоне система учится преодолевать препятствия и ориентироваться в любых погодных условиях. Есть участки, где дорожная разметка отсутствует, ведь в России таких мест «сплошь и рядом». Справиться с такими трудностями помогает дополнительная система локализации и лазерные датчики – лидары. Технология является совместной разработкой инженеров «Группы ГАЗ» и команды учёных Нижегородского государственного технического университета им. Р.Е. Алексеева. На рисунке 4 вы можете увидеть тестовую версию беспилотного автомобиля ГАЗ на фоне логистического центра. На рисунке 5 представлен участок дороги на котором производилось тестирование беспилотной модели автомобиля ГАЗ.  Рисунок 4 – центр в Южно-Приобском месторождении в ХМАО-Югра. Участвует в разработках Конструкторское бюро «Аврора», а также Рязанский радиотехнический университет. По словам директрора компании КБ «Аврора» Станислава Голя их «ГАЗель» проехала в автономном режиме несколько сотен километров на различных полигонах Горьковского автозавода. Она же представляла Россию на Европейском конкурсе роботизированной техники European Land Robot Trial. В 2015 году КБ «Аврора» получила от «Сколково» грант 5 млн руб. на разработку программного обеспечения для беспилотных автомобилей. Сумма небольшая, но всё же. На рисунке 6 представлена версия разработанная КБ “Аврора”.  Рисунок 5 -Беспилотное тестирование грузопассажирского фургона «ГАЗель»  Рисунок 6 - Опытный образец «ГАЗели» с системой автономного хода, разработанной КБ «Аврора» Сегодня машина от КБ «Аврора» может совершать автономное движение из начальной точки в конечную по автоматически выбираемому маршруту и абсолютно без разметки. При этом она искусно объезжает все естественные и искусственные препятствия. Машина хорошо себя показала в программе «Следуй за мной» – это автономное движение за ведущим в колонне, что в Европе получило название platooning. Есть и функция «Движение за активной меткой», которая позволяет буквально «за руку» привести машину, например, к точке отгрузки. На рисунке 7 вы можете увидеть представленные группой ГАЗ два беспилотных автомобиля на базе электробусов «ГАЗель NEXT».  Рисунок 7 - В 2018 году «Группа ГАЗ» представила на Московском международном автосалоне два беспилотных автомобиля. Обе новинки построены на базе электробусов «ГАЗель NEXT» Видеть как человек Беспилотная «ГАЗель» распознаёт людей, здания, деревья, реагирует на погодные условия. Автономная машина получает информацию об окружающей обстановке от многочисленных датчиков и камер, размещённых на бортах и крыше машины. Глаза робота – система сканеров. Трёхмерный дальдномер, или попросту лидар, непрерывно вращается вокруг оси и передаёт объёмную 3D картину происходящего. 2D сканер передаёт информацию о преградах, которые возникают непосредственно на пути. В зависимости от внешней обстановки компьютер принимает решение о скорости передвижения и дальнейших маневрированиях. Акселератор, сцепление, тормозная система и рулевое колесо управляются при помощи электроприводов специальными контроллерами. На рисунке 8 представлена система сбора информации об окружающей среде. На рисунке 9 вы можете увидеть лидары помогающие автомобилю ориентироваться в пространстве, распознавать границы проезжей части даже при отсутствии дорожной разметки. 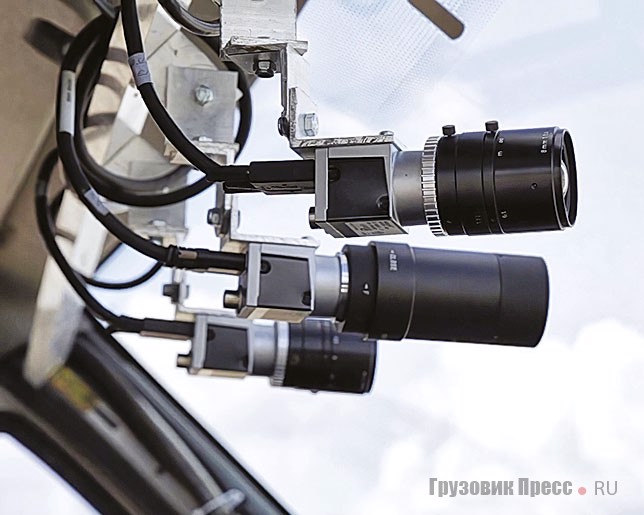 Рисунок 8 - Система управления на базе нескольких блоков широкоугольных стереопар, которые нужны для сбора информации об окружающей среде  Рисунок - 9 Лазерные датчики – лидары Чтобы научить машину правильно реагировать на препятствия и ситуации, конструкторам приходится проявлять чудеса изобретательности. Испытания автономных автомобилей проходят в самых разных погодных условиях. Идеальная среда не подходит, нужны дождь, снег, ветер, пыль, гололёд, изменение освещённости – всё это существенно изменяет картину восприятия окружающей среды роботами. Эти нюансы нужно накопить и обучить автономную машину «правильному поведению». Сделать это можно, но для некоторых «решений» автономной машины требуются значительные вычисления, а это время, которого в экстренных ситуациях может не хватить. К тому же конструкторы всегда поднимают вопрос о компактности оборудования. Современные вычислительные технологии шагнули далеко вперёд, но ещё недостаточно. Изображение 10 демонстрирует как видит дорогу робот. 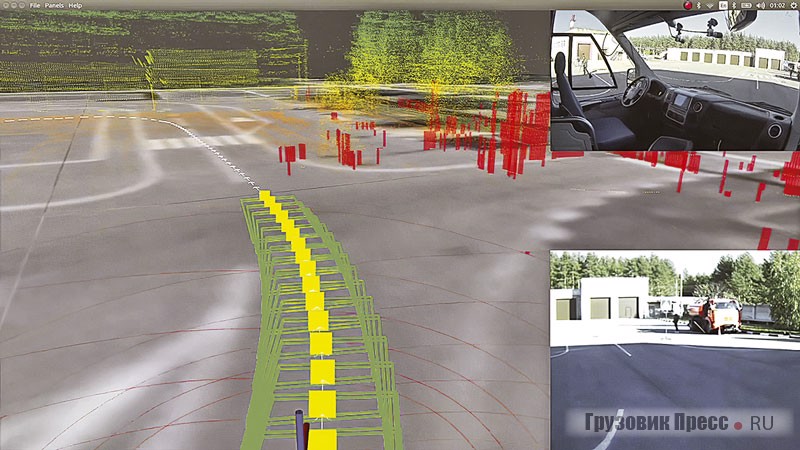 Рисунок 10 - Так видит дорогу робот Достижимые задачи На беспилотной «ГАЗели» установлены те же сенсоры, что и на гугломобилях, эппломобилях и других беспилотных машинах, которые нынче тестируют крупные автоконцерны. И потому как за последние годы ничего прорывного мы не видим, можно сказать, что прогресс в этой сфере деятельности не быстрый. Электромеханика уже давно превосходит человеческие возможности: сенсоры видят глубже, шире, в разных спектральных диапазонах. Но в целом есть одна главная проблема – создать программное обеспечение искусственного интеллекта, которая сможет со всем этим управиться. А здесь пока всё развивается очень медленно. Тем не менее мы находимся на пороге ожидания, когда математика выдаст нам что-то революционно новое, которое позволит преодолеть этот барьер. Кроме ускорения обработки данных и решения вопроса с практическим применением беспилотников ещё предстоит определить и юридический статус автомобилей без водителя. А этот вопрос, учитывая специфику законодательных органов в любой стране, может затянуться на годы. Рисунок 11 демонстрирует кабину современного автомобиля, которая в последствии может изменится для расположения большего числа умной электроники в борту. На рисунке 12 вы можете увидеть водителя на ходу со свободно поднятыми руками за рулём автоматизированного автомобиля.  Рисунок 11 – Кабина современного автомобиля  Рисунок 12 – водитель демонстрирует, что его руки свободны, а присутствие за рулём – лишь требование закона Пока же один из беспилотников успешно работает на внутризаводском маршруте Горьковского автозавода. Он ездит между Объединённым инженерным центром и главным конвейером. Это отличная практика для автономной машины, так как внутри предприятия огромное количество различных помех, начиная от электромагнитных излучений и заканчивая банальными бетонными блоками на территории и интенсивного потока транспорта. В ближайшее время один из автомобилей будет передан стороннему подрядчику для тестовой эксплуатации в условиях реальной промышленной зоны. По мере совершенствования автономного вождения и распознавания машиной условий окружающей среды возникали всё новые задачи. Необходимо не только научить автомобиль следовать по маршруту с определённой скоростью и выдерживать заданную дистанцию до впереди идущей машины, это уже реализовано в системах активного круиз-контроля. Нужно чтобы автомобиль умел реагировать на внештатные ситуации, типа пешеходов-нарушителей или, например, не перепутал бумажный пакет на дороге с камнем, как это периодически происходит с автопилотом от Google. На рисунке 13 представлено фото с испытания беспилотника ГАЗ по распознаванию элементов дорожной инфраструктуры. На рисунке 12 демонстрируется работа функции полной остановки автомобиля перед пешеходом.  Рисунок 13 - Беспилотники ГАЗа используют систему распознавания объектов дорожной инфраструктуры и разметки  Рисунок 14 - Полная остановка перед пешеходом на переходе. В США автономное такси оператора Uber задавило пешехода, переходившего в неположенном месте, но посадили человека, отвечавшего за эту машину На рисунке 15 представлен фрагмент испытаний автономного автомобиля ГАЗ на полигоне завода.  Рисунок 15 - Фрагмент испытаний автономной «ГАЗели» на полигоне завода. Такая смена полосы перед поворотом более свойственна нерадивым водителям Кстати, сравнение гугломобиля с автономной «ГАЗелью» не совсем корректное. Гугломобиль требует постоянного подключения к Интернету, в то время как беспилотная «ГАЗель» разрабатывается как абсолютно автономный вариант. И всё же это будет чудо, когда на наших улицах начнут появляться «ГАЗели» без водителя в кабине, а может, и вовсе без кабины. Но сегодня мне в это не верится, поскольку я слышал высказывание одного из разработчиков таких систем: «Да, мы научили машину двигаться самостоятельно, но сможем ли научить принимать решение. Именно поэтому сегодня объезд пня в траве – это просто колоссальная проблема для движения вперёд». |