Ерс. Автоматты реттеуіштер жне реттеу задары. 18. 09. 2021
 Скачать 0.57 Mb. Скачать 0.57 Mb.
|

|
Автоматты реттеуіштер және реттеу заңдары. 18.09.2021 1. Реттеуіштердің негізгі анықтамалары.. 2. Реттеу параметрлердің түрлері. 3. Автоматты реттеуіштердің реттеу әсері бойынша өзгеру сипаттамасы. Автоматты реттеуіштер мен реттелу обьектісі қосылып АРЖ-ны құрайды. Автоматты реттеуіштер деп, реттелетін шаманы берілген деңгейде белгілі бір дәлдікпен ұстап отыратын құрылғылар жиынтығын айтады. Реттеуіштің кірісіне реттелетін шаманың нақты (у) және берілген мәндері (g) келіп түседі (9-ші, а-сурет). Олардың арасындағы айырымы (х) реттеуіштің шығыстық шамасының өзгерісін тудырады: U=f(g-y)=f(x). Автоматтандыру жүйесіндегі реттеуіштің негізгі міндеті реттеу қатесін (x) анықтап, реттеуші ықпалды (U) тудыру болып табылады. Реттеуіш элементтерінің инерциялығын ескермегендегі x кірістік және шығыстық U шамалардың арасындағы тәуелділік реттеу заңын тұжырымдайды. Реттеуіштер пайдаланатын энергиясына, реттелетін шама түріне, уақыт бірлігіндегі байланыс сипатына, қосалқы энергия көзінің бар-жоқтығына т.б. белгілеріне қарай жіктеледі.  Сурет 9. Уақыт бірлігіндегі байланыс сипаты бойынша реттеуіштер дискретті және үзіліссіз болады. Дискретті реттеуіштерде кірістік шаманың үзіліссіз өзгерісіне реттелетін ықпалдың секіріс тәрізді өгерісі сәйкес келеді. Үзіліссіз (аналогтық) реттеуіштерде кірістік сигналының үзіліссіз өзгерісіне реттелуші шаманың үзіліссіз өзгерісі сәйкес келеді. Үзілісіз әрекетті реттеуіштердің барлығы бір стандартты заңдарды жасайды. Реттеу заңы бойынша реттеуіштер пропорционалдықдық (П), интегралдық (И), пропорционалдық – интегралдық (ПИ), пропорционалдық – дифференциалдық (ПД), пропорционалдық – интегралдық – дифференциалдық (ПИД) болып ажыратылады. Енді осы реттеуіштерге жеке – жеке тоқталып өтелік. 1. Пропорционалдық реттеуіш (П-реттеуіш) х айырмашылығына сәйкес (реттелетін шаманың ауытқуына) пропорционал реттеуші ықпалды (U) тудырады U=kpx (1) Мұндағы kp – баптау параметрі болатын реттеуіштің беріліс(пропорционалдық) коэффициенті. Реттеуіштің беріліс функциясы: Wn(p)= kp (2) Пропорционалдық реттеуіштерді статикалық деп те атайды, өйткені олар әрдайым статикалық қатемен жұмыс істейді. (1)-ден тиімді реттеуші ықпал (U) жүзеге асуы үшін кірісте міндетті түрде қателік сигналы (х) болу керектігін байқауга болады. Беріліс (күшейту) коэффициенті (кр) неғұрлым көп болған сайын, реттеу қателігі согұрлым азая түседі. 9-ші, в-суретте өтпелі сипаттама, яғни П-реттеуіштің х секіріс тәрізді (9-ші, б-сурет) кірістік ықпалға реакциясы көрсетілген. Ол ординатасы крболатын сатылы функция түрінде болады. Тура әрекетті реттеуіштерде реттеудің пропорционалдық заңын жүзеге асыру үшін кәдімгі күшейткіш құрылғылар, ал жанама әрекетті реттеуіштерде — қатаң кері байланыс кұрылғылары (күшейткіш буын) пайдаланылады. Сондыктан жанама әрекетті П-ретгеуіштерді қатаң кері байланысты реттеуіштер деп те атайды.  Кері байланыс ықпалының дәрежесі, яғни кері байланыс сигналының реттеуші органның ығысуына салыстырмалы әсері, кері байланыс құрылғысының күшейту коэффициентіне тәуелді. 10-ші, а-суретте нақты П-реттеуіштердің құрылымдық схемасы көрсетілген (10, б, в және г-суреттерде И-реттеуіштің, ПИ-реттеуіштің және ПИД-реттеуіштің әрқайсысының сәйкес құрылымдық схемалары керсетілген). Ал, АБЖ-да, әдетте динамикалық касиеттері бойынша беріліс функциясы: Интегралдаушы буын түрінде болатын орындаушы механизмдері пайдаланатындықтан, реттеудің пропорционалдық заңын реттеуіштің тура тізбегінде тұрған  күшейткіш буын мен күшейткіш буын мен  орындаушы механизмді орындаушы механизмді  беріліс функциясы бар теріс байланыспен қармау аркылы жүзеге асыруға болады. Құрылымдық схемаға сәйкес мұндай реттеуіштің беріліс функциясы мынаған тең болады беріліс функциясы бар теріс байланыспен қармау аркылы жүзеге асыруға болады. Құрылымдық схемаға сәйкес мұндай реттеуіштің беріліс функциясы мынаған тең боладымүндағы kр=1/ko.c.; Т = То.м/k1kк.б. .Демек, нақты П-реттеуіштің беріліс функциясын пропорционалдық буын  мен апериодтық мен апериодтық  буыңдардың тізбектей жалғасуы түрінде көрсетуге болады: буыңдардың тізбектей жалғасуы түрінде көрсетуге болады:2. Интегралдық реттеуіш (И-реттеуіш) реттеуші органға реттелмекші шаманың ауытқуының интегралына пропорционал ықпал етеді U=1/Tи  (3) (3)немесе du/ dt= 1/ Tи * x (4) яғни реттеуші органның (РО) жылжу шапшаңдығы х-ке пропорционал. Демек, әлі х ауытқуы бар болғанда РО ешқашан тоқтамайды. Бұл статикалық қателіктің жоқ болғаны деген сөз. РО –ның тепе-теңдік заңына реттелуші шаманың тұрақтылығы жатады, яғни U=const; dU/dt=0; x=0 болулары тиіс. Ал, статикалық қателік болмағандықтан, И-реттеуіштерді жалпы астатикалық реттеуіштер деп атайды. Тnкоэффициенті — баптау параметрі, уақыт бірлігімен өлшенеді де, интегралдау тұрақтысы делінеді. Оның мәні реттелуші органның максимал кірістік сигналы кезінде бір шеткі күйден екіншісіне дейінгі аралыққа ығысқанына кететін уақытқа тең. Интегралдау уақытының тұрақтысының физикалық мағынасына тоқталайық. Айталық, реттеуіштің кірісіне х =хотұрақты сигнал келсін. Бұл кезде шығыстық сигналы (3)-ке сәйкес U=x0t/Tn заңы бойынша өзгереді. Нақты реттеуішіні 10-ші, б суретіндегідей құрылымдық схемамен көрсетуге болады. Онда W(p)=1/Tn p реттеушінің тура тізбегіндегі интегралдаушы буын мен Wk(p)=K күшейткіш буын қатаң кері байланыспен қамтылған, яғни кері байланыс тізбегіне Wк.б(p)=kк.б күшейткіш буын жалғастырылған. Мұндай реттеуіштің беріліс функциясы мынаған тең: Wp..н (p)=k1/Tn’p/1+k1ko.c/Tn.p*1/To.mp= 1/Tn’p *1/Tp+1= kn/p(1/Tp+1), (5) Мұндағы Tn=kк.бТо.м; Т=Тn’/k1kк.б. сонымен, нақты И – реттеуіштің беріліс функциясын идеал И – реттеуіш W(p)=1/Tn p пен уақыт тұрақтысы Т болатын апериодтық буынды Wа.п(p)=1/(Tn p+1) тізбектей қосылғандағы түрде көрсетуге болады. 3. Дифференциалдық реттеуіш (Д-реттеуіш). Пропорционалдық реттеуіштер реттелетін шама берілген мәнінен едәуір ауытқыған кезде обьектіге айтарлықтай реттеуіштік ықпалын тигізеді. Ал, интегралдық реттеуіштер реттеуші ықпалымен обьектіге әсер ете отырып, оны интегралдық заң бойынша әрі қарай өрістете береді. Сонымен П және И-реттеуіштер реттелетін шаманың алдағы уақыттағы ауытқуының алдын ала алмайды, олар тек технологиялық процестің осы мезеттегі өз калпынан ауытқып кеткендігін ғана тіркейді. Оған қоса уақыттың қандай да бір мезетінде реттелетін шама берліген мәнінен тез ауытқи бастаса, онда обьектіге айтарлықтай әсер берілген болады, яғни осы ықпалдың нәтижесінде реттелетін шаманың ауытқуы да біразға жетеді. Бұл жағдайда реттелетін шаманың берілген мәнінен ауытқу жылдамдығына пропорционал реттеуші әсер тудыратын, яғни U = Tд dх/ dt (6) заңы бойынша жұмыс істейтін реттеуіштің қажеттігі анық. Онда реттеуіштің беріліс функциясы мынадай болады Wд(p)= Tд p (7) Мұндай реттеуіштердің едәуір сыртқы әсерлер салдарынан реттелетін шаманың берілген мәнінен ауытқу жылдамдығы үлкен болған кезде объектіге тигізер әсері зор. Себебі бұл ауытқудың бастапқы мезетінде П - реттеуіш объектіге өте әлсіз әсермен ғана ықпал етеді, ал И - реттеуіші болса өзінің реттеуші әсерін енді ғана тудыра бастайды. Д – реттеуіш (6) заңына сәйкес лезде И- реттеуші әсерін тудырып, объектіге берілген сыртқы әсердің нәтижесін тез арада бейтарап қалыпқа түсіріп отырады. Сонымен Д – реттеуіш объектіге тигізер сыртқы ауытқуын алдын ала бір қалыпқа түсіретін реттеуші әсерді тудырып отырады. Бұл заңды таза күйінде жүзеге асыру өте қиын. Сол себептен Д- реттеуіші ретінде реттеу заңы ТД dU/dt+U= KдТД dx/dt, (8) Беріліс функциясы Wд(p)= КДЕДр/TДр+1 (9) болатын дифференциаторлар қолданылады. 4. Пропорционалдық – интегралдық рететуіштер (ПИ – реттеуіштер). Автоматты жүйелерде П және И реттеу заңдарының артықшылығын комплексті пайдалану П және И реттеу заңдарын бір мезгілде қалыптастыратын реттеуіштер кеңінен қолданылады. Мұндай реттеуіштерді пропорционалдық – интегралдық немесе қысқаша ПИ – реттеуші дейді. Мұндай реттеуіштер реттелуші органға реттелетін шаманың ауықуына және осы реттелетін шаманың ауытқуының интегралына пропорционал ықпал етеді: U=Kp x + 1/Tи  (10) (10)ПИ – реттеуіштің берілу функциясы: W пи(p)=Kp+ 1/ Tи p (11) Құрылымы жағынан ПИ-реттеуіштер беріліс функциясы W п(p)=Kp П- реттеуіш пен беріліс функциясы W п(p)=1/ Tи p И реттеуіштің параллель қосылысына барабар (11, a-сурет) Егер ПИ – реттеуішті баптау кезінде (Tи) уақыт тұрақтысын өте үлкен мәнін тағайындаса, онда ол П – реттеуішке айналады. Егер реттеуішті баптау кезінде Kp–нің өте кіші мәнін тағайындаса, онда жылдамдық тұрғысында 1/ Tи беріліс коэффициенті бар И реттеуішін аламыз. (11) беріліс функциясы бар ПИ реттеуіштің өтпелі сипаттамасы 7.22 – суретте (1-түзу) көрсетілген. Реттелген шаманың x=x0 мәнге секірмелі өзгерісі кезінде, идеал ПИ реттеуіш атқарушы механизмді дереу реттелетін шаманың x0 ауытқуына пропорционал Kp x0 шамаға жылжытады, содан кейін реттеуіштің атқарушы механизмі реттелетін шаманың ауытқуына пропорционал x0/Tn жылдамдықпен сол бағытта тағы да жылжиды. Демек, ПИ реттеуіште реттелетін шаманың берілген мәннен ауытқуы кезінде реттеуіштің пропорционалдық (статикалық) бөлігі лезде іске қосылып, содан кейін оның интегралдық (астатикалық) бөлігі арқылы оның объектіге түсіретін ықпалы біртіндеп арта бастайды. Реттеуіштің баптау параметрлеріне Кр күшейту коэффициенті мен интегралдаудың Tn уақыт тұрақтысы жатады. 11, a- суреттегі құрылымдық схемалы және (11) беріліс функциялы ПИ- реттеуіштің бір- біріне тәуелсіз Кр және Tn баптау параметрлері бар. 11, a-суреттегі схемадан басқа іс жүзінде ПИ- реттеуіштің 11, б- суреттегідей құрылымдық схемасы ды кеңінен қолданылады. 11, б- суреттегі берілген схема U=Kp(x+1/Tиз ∫ х dt) (12) Түріндегі реттеу заңын жүзеге асырады. Tиз уақыт тұрақтысын ( дайындаушы зауыттың атауы бойынша) изодром уақыт тұрақтысы не изодром уақыты деп атайды. 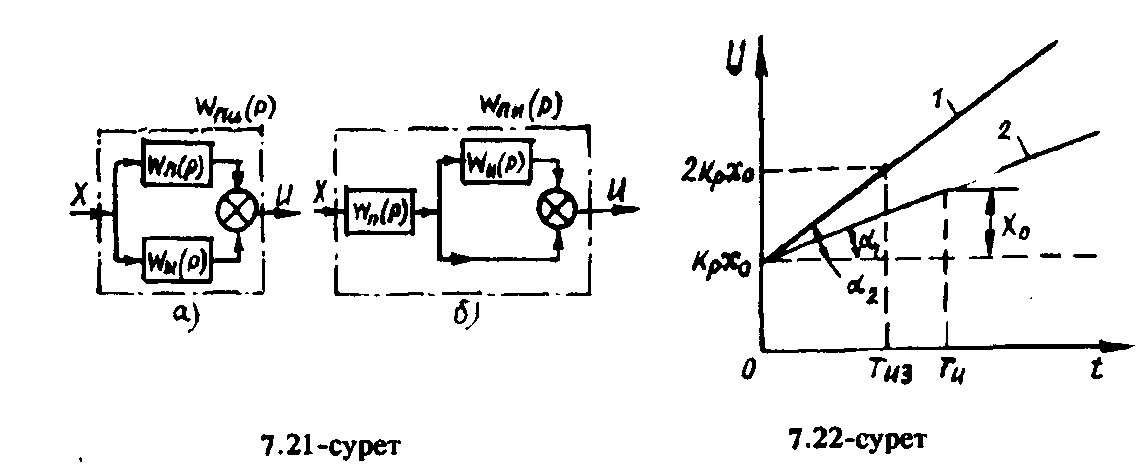 Сурет 11. Сурет 12. Реттеуіштің беріліс функциясы W пи(p)=Kp ( Tиз p+1)/Tиз p. (13) Демек, 11, б-суреттегі құрылымдық схемалы ПИ- реттеуіш Кр күшейту коэффициенті бойынша статикалық және астатикалық бөліктерін баптаудың өзара байланысқан параметрлеріне ие болады. Ал, Кр күшейту коэффициентін баптау кезінде интегралдаудың уақыт тұрақтысы да өзгереді Tn=Tиз/Kp (14) Tиз изодром уақыт тұрақтысының физикалық мағынасын қарастырайық. Айталық, ПИ реттеу заңы бойынша (10) реттеуіштің кірісіне хо тұрақты сигнал келіп түссін, Ал, тұрақты шаманы интеграл таңбасының сыртына шығаруға болғандықтан, (7.48) өрнегін мына түрде жазуға болады: U=Kp (x0 +1/Tиз ) (15) Реттеуіштің кірісінде x=x0 тұрақты сигнал түскен кезде (t=0) бастапқы мезетте пропорционалдық құраушы дереу іске қосылады да, реттеуіштің кірісінде U1=Kpx0 сигналы пайда болады. Одан ары (15) заңы бойынша интегралдық құраушының шығыстық сигналы сызықты түрде өсе отырып, t=Tиз кезінде U2=2Kpx0 мәнге жетеді. Осылайша, ПИ реттеу заңдылығы бар реттеуіштің интегралдық (астатикалық) бөлігінің әсерінен реттеу заңының пропоционалдық (статикалық) құрамасы мәнінің екі есе артқанға дейін кететін уақытты айтады. 12- суретте (10) және (15) өрнектеріне сәйкесінше Кр коэффициенттерді бірдей ПИ реттеуіштердің олардың кірісіне хо тұрақты сигнал келіп түскен кездегі өтпелі сипаттамалыры көрсетілген. Және бұл суретте реттеуіш интегралдауының (10) мен берілген уақыт тұрақтысы мен реттеуіштің (15) мен берілген изодром уақыт тұрақтысының геометриялық мағынасы жақсы көрсетілген. Бұл суретте Кр>1 болған кездегі ПИ-реттеу заңдары да көрсетілген. Егер Кр<1 болса, онда 1- ПИ реттеу заңының (10) интегралдық құрауышысының α1 көлбеу бұрышы 2- ПИ реттеу заңының (15) интегралдық құраушысының α2 көлбеу бұрышынан үлкен болады. Бұл жағдайда 1-түзу 2- түзуден жоғары өтеді. Автоматты реттеу жүйесінде жоғарыда айтылғандай идеал ПИ реттеуші интегралдауыш буынды П реттеуіштің пропорционал бөлігіне параллель қосу арқылы көрсетілген құрылымдық схема түрінде алуға болады. Схемада Wп(p)=K1 пропорционалдық буын мен Wом(p)=1/Tомр интегралдауыш орындаушы механизм реттеуіштің тура тізбегінде серпімді (иілімді) кері байланыспен қамтылған Wк.б(p)=Kк.бT1p/(T1p+1). Мұндай реттеуіштің беріліс функциясы 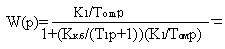 =Kp(1+1/Tизр)(1/(Tp+1)), (16) мұндағы K=K1T1/Tом+K1Kк.БT1;  Т=T1 Осылайша нақты ПИ реттеуші идеал пропорционалдық интегралдық Wпи(p) және T уақыт тұрақтысы бар Wап(p) апериодтық динамикалық буындардың тізбектей жалғасуы түрінде қарастыруға болады. Нақты ПИ реттеуіштің беріліс функциясынан Тиз изодром уақыты мен Кр күшейту коэффициентінің өзара байланысты болатынын көруге болады. Сол себепті уақыт өтуінен Тиз изодром уақытын баптау үшін реттеуіштің сатикалық бөлігінің Кр беріліс коэффициентінің де оған сәйкес үйлестіру қажет. Идеал ПД реттеуіштің кірісіне хо тұрақты сигнал келгенде, шығысында лезде ПД реттеу заңының дифференциалдауыш құраушысының әсерінен туатын шексіз үлкен сигнал мен пропорционалдық құрайшысынан туатын Uпроп=Kрx0 сигналы пайда болады. Дифференциалдауыш құраушыдан туатын сигнал нөлге дейін кеміп, ал пропорционалдық құраушыдан туатын сигнал тұрақты әрі бастапқы Uпроп=Kрx0 мәніне тең болып қалады (13, a-сурет). Бір қарағанда дифференциалдайтын бөліктен практикалық нәтиже болмайтын сияқты көрінеді. Шын мәнінде реттеу заңыны дифференциалдайтын құаушы еңгізу реттеуіштің әрекетінің тиімділігін айтарлықтай арттырады. Мәселе объектіге оның инерттілігіне байланысты қоздыру ықпалы әсер еткенде реттелетін шаманың берілген мәнен ауытқуы біртіндеп ұлғайяды да, оның абсолюттік мәні де, ұзақтығы да ос ыауытқуды дифференциалдағандағы оның соңғы мәнімен анықталады. 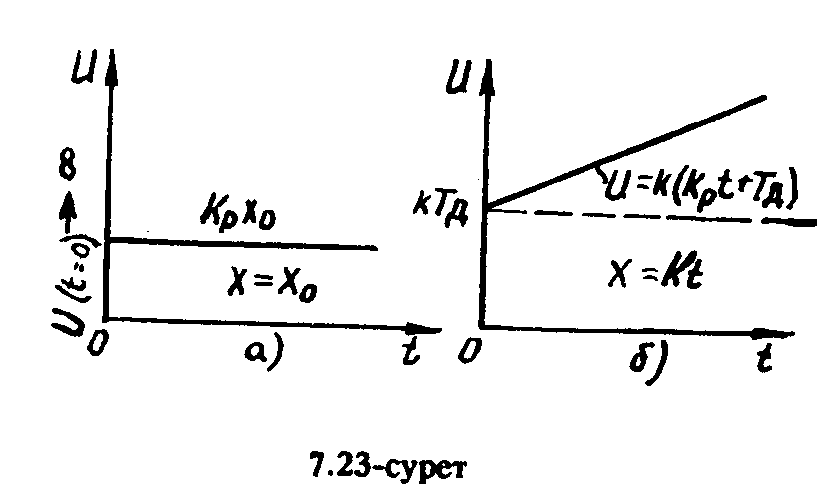 Сурет 13. Егер реттелетін шаманың берілген мәннен ауытқуы y=Kt заңы бойынша өтсе, онда ПД – реттеу заңының дифференциалдықт құраушысы (17) заңы бар реттеуіш үшін Uд=KTд , ал (19) заңы бар реттеуіш үшін Uд=KKрTао мәніне бірден ие болады. Пропорционалдық құраушы Uпроп=KKрT сызықтық заңы бойына баяу өседі. Кірісіне y=Kt сигнал келіп түскендегі ПД реттеуштегі өтпелі процесс 13, б- суретте көрсетілген. 5. Пропорционалдық – дифференциалдық реттеуіштер. Пропорционалдық – дифференциалдық реттеуіштер (ПД – реттеуіштер) реттеу обьектісіне реттелетін шаманың және оның жылдамдығына пропорционал әсер етеді: U=Kpx+Tд dx/dt (17) Tд уақыт тұрақтысы дифференциалдау уақытының тұрақтысы делінеді. Ол реттеуші сигналдың жылдамдықты көрсететін құраушысының шамасын анықтайды. Бұл реттеуішті күшейткіш пен идеал дифференциалдайтын буындардың параллель қосылысы түрінде көрсетуге болады. Реттеуіштің беріліс функциясы: Wп.д(p) = Kp+Tд p (18) Пропорционалдық – дифференциалдық реттеуіштердің ПИ – реттеуіштер тәрізді Kp ортақ күшейту коэффициенті бар құрылымдық схемасы болуы мүмкін. Бұл жағдайда ПД-реттеу заңы мына түрде жазылады: U = Kp( x+Ta.o dx/ dt) (19) Ta.o уақыт тұрақтысы алдынан орау уақыт тұрақтысы делінеді. Реттеуіштің беріліс функциясы мына түрде болады: Wп.д (p) = Kр (1 + Tа.о p) (20) Пропорционалдық – интегралдық дифференциалдық реттеуіштер. Мұндай реттеуіштер реттеу обьектісіне реттелетін шаманың х ауытқуына, осы ауытқу интегралына және реттелетін шаманың өзгеру жылдамдығына пропорционал ықпал етеді: U=K px + 1/Tи + Tд dx/dt (21)ПИД – реттеуіштің құрылымдық схемасы 14, а – суретте берілген. ПИ және ПД-реттеу заңдары тәрізді ПИД-реттеуіштің де құрылымдық схемасы реттеу заңының әртүрлі құраушыларына ортақ коэффициенті бар түрде де болуы мүмкін. Реттеу заңы бұл жағдайда төмендегідей түрде жазылады: U = Kр (x + 1/Tиз  Ta.o dx/dt) (22) Ta.o dx/dt) (22)(21) ПИД-реттеуіштің беріліс функциясы W(p) = K + 1/T p + T p (23) (22) ПИД-реттеуіштің беріліс функциясы Wпид (p) = Kр (1 + 1/Tиз p + Tа.о p) (24) 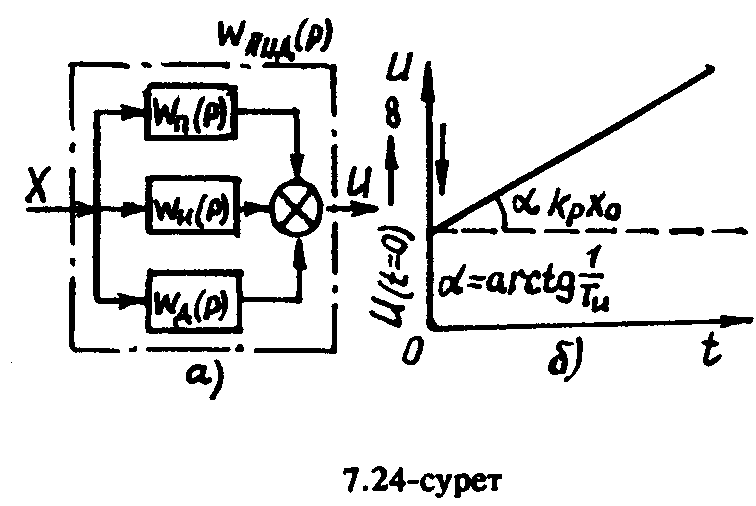 Сурет 14. Реттелетін шама секірмелі өзгергенде, идеал ПИД реттеуіш бастапқы сәтте реттеу объектісіне шексіз ықпал етеді, содан кейін ықпал ету шамасы реттеуіштің пропорционалдық бөлігімен анықталатын мәнге дейін лезде төмендейді де, одан әрі ПИ реттеуіштегідей өз ықпалын реттеуіштің астатикалық бөлігі білдіре бастайды (14,a-c). (24) ПИД –реттеуіштің баптау параметрлері болып реттеуіштің Kр пропорционалдық коэффициенті, интегралдаудың Тn уақыт тұрақтысы болып табылады. ПИД реттеуіштің баптау параметрлеріне Kр Tиз және Tа.ож атады. Мұндай реттуіш үшін Tn=Tиз/Kр интегралдау және Tд= Kр Tа.о дифференциалдау уақыт тұрақтылыры реттеуіштің беріліс коэффициентіне тәуелді. Баптау мүмкіндігіне қарай ПИД реттеуіштер басқа реттеуіштермен салыстырғанда барынша жетілген. Оның көмегімен еттеудің әртүрлі заңдарын жүзеге асыруға болады. Айталық, Tд=0 және Tnдің шексіз үкен мәніне П реттеуішті (3.39) аламыз; Kр=0 және Tд=0 кезінде И реттеуші (5) аламыз; Kр=0 және Tд=∞ кезінде Д реттеуші (8) аламыз. Tд=0 кезінде ПИ реттеуші (13) аламыз. Tn-дің шексіз үлкен мәнінде және Kр мен Tд шекті мәндерінде болғанда ПД реттеуші (18) аламыз. 10, г-суретте өнеркәсіптік ПИД реттеуіштің құрылымдық схемасы берілген. Алдынан орау ықпалы реттеуішке оның екі апериодтық буынды қамтитын пропоционалдық бөлігі иілімді кері иілімді кері байланыспен қармау арқылы өндіріледі. Мұндай еттуіштің беріліс функциясы:  (25)  демек, нақты ПИД реттеуіштің беріліс функциясы идеал ПИД реттеуіштің буындары мен екінші ретті апериодтық буынның тізбектей қосылысы түрінде болады. Аталғандардан басқа позициялық реттеуіштер де кең тараған. Позициялық немесе ререлік деп, кірістік шамасы өзгергенде шығыстық шамасы алдын ала белгілі бір ғана мәнге не күйге тоқтайтын реттеуішті айтады. Бұл реттеуіште кірістік шаманың шығыстық шамаға айналуы үлкен жылдамдықпен өтеді. Мұндай реттеуіштердің құрылысы қарапайым, сенімді, баптауы әрі пайдалануы оңай. Олардың ішіндегі ең көп тарағаны қос позициялық, онда шығыстық шама тек минимал және максимал мәнге ғана ие болады. Реттеудің позициялық заңдары үшін U(x) үзіліссіз тәуеділік болмайды. Бұл тәуелділік көбінесе бейсызықты функциялармен өрнектеледі. Позициялық реттеуіштер реттелетін шаманың ауытқу сигналын алысымен, оған сәйкес реттелуші органды екі ең шеткі күйдің біріне ығыстырады.  Сурет 15. Рп және Рж позициялық реттеудің негізгі екі қарапайым заңы бар: Рп - реттеу заңы (ререлі позициялық) (15-cурет) реттеуіштің х кірісі мен u шығысының арасындағы тәуелділікті көрсетеді. Аналитикалық түрде Рп заңы теңдеулер жүйесімен өрнектеледі: U = Uosign(x-∆), dx/dt>0, U = Uosign(x+∆), dx/dt<0, (26) Мұндағы ∆ - бейбірмәнділік аймағынын жартысы; sign – жақшадағы бином таңбасын білдіреді. Тест сұрақтарын құрастыру. Саметова Г.Т. WhatsApp +77758877025 email Gauhar_sametova@mail.ru |