Ботвоуборочная машина. Ботвоуборочная машина бм6б назначение
 Скачать 3.48 Mb. Скачать 3.48 Mb.
|

|
Ботвоуборочная машина БМ-6Б Назначение Ботвоуборочная машина БМ-6Б предназначена для выполнения процесса срезания листьев сахарной свеклы, возделываемой с междурядиями 45 см и предварительной зачистки верхней головки корня от остатков листовой массы. Таблица 29 Краткая техническая характеристика БМ-6Б
Общее устройство Ботвоуборочная машина БМ-6Б состоит из прицепного устройства 1 (рис. 196), основной рамы 8, ботвосрезающих аппаратов 9 с механизмом копирования головок корней 10, ходовых колес 7, приемного транспортера 3, погрузочного элеватора 4 с ботвометателем 5 и доочистителя головок корней 6. Рама состоит из центральной части 8 и двух консольных (рис. 196). В передней части основная рама имеет дополнительную П-образную. К этой рамке присоединяется прицеп, и она является основой для крепления цилиндра управления и гидроследящей системы. В задней части основной рамы приваривается также П-образная рама, на которой закрепляются элементы погрузочного элеватора 4 и создается база для установки одновального доочистителя 6. На основной раме, в ее центральной части устанавливаются вертикальные стойки, которые являются базой для размещения двух подвижных рам с тремя ботвосрезающими аппаратами и продольных приемных транспортеров листьев 3. Подвижная рама размещена шарнирно в передней части основной рамы, соединение между ними идет через подшипники, а опускание в рабочее положение и подъем в транспортное положение обеспечивается двумя гидравлическими цилиндрами. В рабочем положении машины за счет гидрораспределителя трактора гидроцилиндры управления подвижной рамой ставятся в «плавающее» положение. На передней части подвижных рам установлены пневматические опорно-регулируемые колеса 11, за счет которых подвижные рамы копируют неровности рельефа, что позволяет ботвосрезающим аппаратам обеспечивать высокое качество срезания листьев.  Рис. 196. Ботвоуборочная машина БМ-6Б: 1 – прицеп; 2 – копир-водитель; 3 – приемный транспортер; 4 – погрузочный элеватор; 5 – ботвометатель; 6 – доочиститель головок корней; 7 – ходовое колесо; 8 – основная рама; 9 – режущий аппарат; 10 – копир; 11 – опорное колесо Ботвосрезающие аппараты с механизмом копирования головок корней установлены в передней части подвижных рам (рис. 197) и обеспечивают установку передней кромки режущего дискового аппарата каждой из шести рабочих секций в исходное положение для срезания головок корней. Дисковые ножи должны горизонтально срезать корень, а массу листьев без потерь направить на приемный продольный транспортер. Подобных продольных транспортеров – два. Один транспортер на три ботвосрезающих аппарата. Копирующий механизм устанавливается перед каждым ботвосрезающим аппаратом (рис. 197). Он состоит из литого кронштейна 4, верхней соединительной тяги 5, стойки 6 и нижней скобы 7, которые создают параллелограммный механизм. К нижнему концу этого механизма за счет четырех болтов крепится пятипланчатый копир 2. В параллелограммном механизме диагонально установлена специальная пружина 8, которая обеспечивает постоянное поднятие планок копира к головкам корней. Величину этого поджатия можно регулировать. 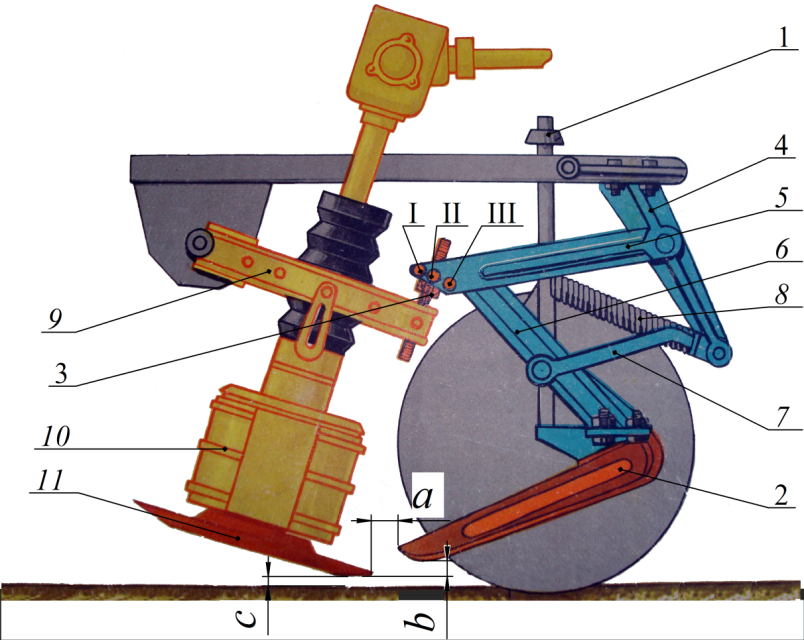 Рис. 197. Ботвосрезающий аппарат: I, II, III – отверстия; а – горизонтальный зазор между ножом и копиром; б – вертикальный зазор между ножом и копиром; с – зазор между ножом и почвой; 1 – винт опорно-копирующего колеса; 2 –копир; 3 – винтовая тяга; 4 – кронштейн; 5 – тяга; 6 – стойка; 7 – скоба нижняя; 8 – пружина; 9 – фигурная рамка; 10 – двухлопастной битер; 11 – нож Соединение режущего аппарата с механизмом копирования осуществляется через винтовую тягу 3 и специальную фигурную рамку 9, охватывающую режущий аппарат. Срезание листьев осуществляется ножом 11 (рис. 197), который может изготавливаться в двух вариантах. Для срезания листьев свеклы в условиях высокой засоренности сорняками защитных зон следует применять диск с наклепанными на него сегментами, с насечками от режущих аппаратов зерноуборочных жаток. При чистом состоянии свеклы на ступицу режущего аппарата устанавливается цилиндрический нож, кромки которого наплавлены твердым сплавом. Над диском ножа режущего аппарата устанавливается двухлопастной битер 10, который обеспечивает переброску срезанных листьев на приемный транспортер. Между крайними режущими аппаратами одинакового вращения с целью уменьшения потерь листовой массы при захвате прутками приемного транспортера устанавливаются вертикальные активные диски. Приемный прутковый транспортер двухсекционный и обеспечивает перемещение срезанной листовой массы от режущего аппарата на горизонтальный поперечный транспортер. Поперечный горизонтальный транспортер служит для транспортировки массы листьев к выгрузному элеватору и выделяет из этой массы почву. Для выполнения последнего вдоль заднего каркаса транспортера имеется грабельная пальцевая решетка и, когда масса листьев выходит с продольного приемного транспортера, то почва проходит через пальцы и затем падает за пределы машины. Листья ударяются о пальцы и падают на транспортер, который состоит из ведущего вала, ведомых натяжных звездочек, поддерживающих роликов, полотна из прутков со скобами и битера. Наклонный погрузочный транспортер массы предназначен для приема листьев от битера горизонтального транспортера, выделение остатков почвы и погрузки в рядом идущий транспорт. Ботвометатель 5 (рис. 196) состоит из двух установленных друг над другом битеров встречного вращения. Очиститель головок корней свеклы 6 (рис. 196) служит для доочистки головки корней от оставшейся не срезанной листовой массы и перемещения растительных остатков с прохода машины на убранную часть поля. Он состоит из следующих основных узлов: карданной передачи, конического редуктора, основной рамы с механизмом навески, вала очистителя с бичами, опорно-регулируемых пневматических колес, промежуточной карданной передачи, клиноременной передачи и привод ротора. Гидросистема машины. В гидросистему машины входит узел управления машиной по рядкам, узел гидросистемы ручной корректировки, узел подъема рабочих органов машины в транспортное положение. Копиры-водители 3 гидроследящей системы (рис. 198) предназначены для восприятия линии рядков и передачи команды на корректировку движения режущих аппаратов по рядкам. Контроль за изгибами рядков осуществляется копир-водителями, каждый из которых состоит из горизонтального полозка, перемещающегося по междурядью, и двух боковых пластинчатых копиров. Пластинчатые копиры контролируют несколько рядков, упираясь с боков в корни. При изгибе рядков идет поперечное смещение копир-водителя, что вызывает передачу сигнала через поперечную тягу на коромысло. Верхний конец коромысла связан с телом золотника гидрораспределителя исполнительной системы, за счет которой масло направляется в ту или иную полость гидроцилиндра 2 управляющего положением рамы машины. Таким образом, независимо от направления движения трактора обеспечивается четкое направление режущих аппаратов по рядкам свеклы.  1 Рис. 198. Гидроследящая система: 1 – гидрораспределитель; 2 – гидроцилиндр; 3 – копиры-водители Универсальная система контроля работы машины представлена системой датчиков, которые установлены на всех ответственных вращающихся валах, проводами и прибором УСАК-6В. Технологический процесс работы Технологический процесс работы ботвоуборочной машины представлен на рисунке 199. Трактор делает заезд на свекловичное поле так, чтобы правый по ходу агрегата режущий аппарат шел по рядку, примыкающему к стыковому междурядью. Копир-водители 2 опускается вместе с режущими аппаратами в рабочее положение и включается ВОМ трактора. При движении по полю копир-водители 2 воспринимают поперечное отклонение рядков и воздействуют на гидроуправление машиной, направляя режущие аппараты 9 по линии рядков свеклы. Опорные колеса 11 ботвосрезающих секций, установленные на переднем конце подвижной рамы, обеспечивают копирование рельефа поля ботвосрезающими секциями. Копиры 10 режущих аппаратов 9, надвигаясь на головки корней, воспринимают их расположение относительно поверхности поля и корректируют линию среза верхней части головки корня ножами. Ножи при своем вращении срезают листовую часть свеклы вместе с верхом корнеплода (розетка), а битерной частью аппарата забрасывают срезанную массу на приемный транспортер. Там масса листьев поднимается вверх к битеру, который за счет дополнительного ускорения выбрасывает листья на прутковый очиститель горизонтальной части поперечного транспортера. Прутки препятствуют выходу листьев из зоны поперечного транспортера, но обеспечивают выделение почвы из общей массы. За счет вращения горизонтальной части поперечного транспортера очищенные от почвы листья направляются на наклонный погрузочный транспортер 4 и его ботвометателями 5 укладываются в рядом идущий транспорт. Обрезанные головки корней доочищаются с одной стороны бичами очистителя 6 и одновременно с рабочего захвата растительные остатки передвигаются влево по ходу машины на убранную площадь. После выполнения данной технологической операции можно проводить выкопку корней. 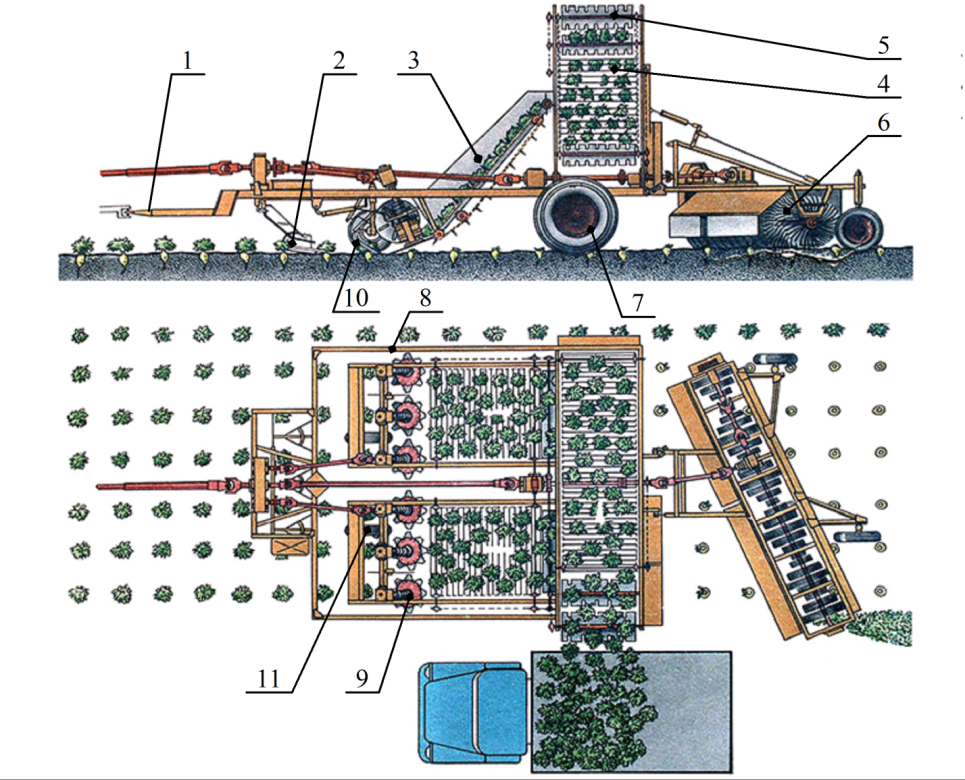 Рис. 199. Технологический процесс работы БМ-6Б: 1 – прицеп; 2 – копир-водитель; 3 – приемный транспортер; 4 – погрузочный транспортёр; 5 – ботвометатель; 6 – доочиститель головок корней; 7 – ходовое колесо; 8 – основная рама; 9 – режущий аппарат; 10 – копир; 11 – опорное колесо Технологические регулировки Регулировка копиров-водителей. Перед регулировками машина должна быть установлена на ровной площадке, причем осевая линия трактора и машины должны совпадать.Отсоединить поперечную тягу копир-водителей от вилки коромысла, и установить зазор между внутренними перьями копиров точно по оси режущих аппаратов.Скорректировать величину зазора между перьями копиров, она должна быть равна размеру среднего диаметра корня плюс 40 мм. Регулировка гидроследящей системы. При заведенном двигателе трактора, перемещая коромысло, добиться, чтобы шток золотника вышел на 32 мм из рабочей камеры и в этом положении гидроцилиндр должен занять свое среднее состояние по выходу штока (150 мм).Соединить (за счет вращения гаек) нижнюю часть коромысла с поперечной тягой копир-водителей. Регулировка режущего аппарата. Перед настройкой режущего аппарата должны быть получены путем измерения на поле средние значения диаметра корня, которые определяют выбор установочных зазоров на режущем аппарате (рис. 197). Горизонтальный зазор принимается равным 1/2 диаметра корня. Вертикальный зазор устанавливается при диаметре корня до 60 мм – 5 мм, при диаметре 60-80 мм – 10 мм, при 80-120 мм – 15 мм. Вертикальной поправкой называют автоматическое увеличение вертикального зазора между концом копира и лезвием ножа при подъеме всего механизма вверх. Вертикальная поправка равна разности между высотами подъема копира и ножа при перемещении их из крайнего нижнего положения в верхнее положение. Чем больше диаметр корня, тем больше вертикальная поправка. Величина поправки определяется перестановкой верхней части винтовой тяги по отверстиям верхней подвески копира (положение I – наибольшая поправка; II – средняя; III – малая). Регулировка очистителя головок корней осуществляется перемещением опорных пневматических колес за счет винтов, что меняет положение лопастей рабочего ротора. Регулировка должна выполняться непосредственно в поле. За исходное положение регулировки принимается состояние, когда нижние концы бичей полностью касаются (заходят на 5 мм) головки корня. При работе состояние поверхности междурядий и линии головок корней должны быть чистыми от растительных остатков и лишь 1-2 корня на 100 м движения выбиваются из линии рядка. Контрольные вопросы 1. Для чего предназначена машина БМ-6Б? 2. Для чего предназначены копиры-водители гидроследящей системы? 3. Для чего устанавливается двухлопастной битер? 4. Что называют вертикальной поправкой? 5. Чему равен горизонтальный зазор в режущем аппарате? МАШИНА КОРНЕУБОРОЧНАЯ МКК-6 Назначение Корнеуборочная машина МКК-6 предназначена для раздельной уборки корнеплодов кормовой свеклы, посеянной с междурядьем 45, 60, 70 см в основной и поливной зонах свеклосеяния. Таблица 30 Краткая техническаяхарактеристикаМКК-6
Общее устройство Машина корнеуборочная МКК-6 состоит из корнеуборочной части и установленного на ее раму трактора МТЗ-80-82, с которого сняты ведущие колеса и мост управляемых колес. Корнеуборочная часть состоит (рис. 200) из несущей рамы 3, мостов ведущих 8 и управляемых 15 колес, шнекового 10, поперечного 6, продольного 9 и погрузочного 1 транспортеров, механизма рулевого управления 17, трансмиссии 4, электрической 2 и гидравлической 19 систем, автомата вождения 16, гасителя 5, копателя, состоящего из активных роторных вилок 14, двух кулачковых 12, 13 валов и приемного транспортера 11, копирующих колес 20. Обрезиненный гаситель, установленный над поперечным транспортером, снижает повреждения корней при переходе их с продольного на поперечный транспортер. После уборки трактор может быть демонтирован и использован на другие сельскохозяйственные работы. Рама – сварная из продольных и поперечных балок. Копирующие колеса 20 служат для установки и поддержания постоянной глубины перемещения подкапывающих рабочих органов относительно поверхности поля. Автомат вождения по рядкам – гидромеханическое устройство (рис. 201) для автоматического направления рабочих органов по рядкам, состоящее из рамы 13, копира 9, золотника управления колес, системы рычагов 3, 4, 5 гидроцилиндра подъёма копира и направителя. Во время движения машины копир перьями касается головок свёклы, при отклонении управляемых колёс от междурядья, копир через систему рычагов перемещает золотник управляемых колес. Рабочая жидкость поступает в гидроцилиндр управляемых колес, который корректирует направление движения. Гидравлическая схема автомата вождения по рядкам (рис. 202) включает копир-водитель 1, рычаг обратной связи 2, насос-дозатор гидроусилителя руля 3, кран-распределитель 4, золотник управляемых колес 5, корректирующий гидроцилиндр 6, рычаг золотника 7, гидроцилиндр рулевого управления 8.  Рис. 200. Схема корнеуборочной машины МКК-6: 1 – погрузочный транспортер; 2 – электрооборудования; 3 – рама; 4 – трансмиссия; 5 – гаситель; 6 – поперечный транспортер; 7 – ограждение; 8 – мост ведущих колес; 9 – продольный транспортер; 10 – шнековый транспортер; 11 – приемный транспортер копателя; 12 – второй кулачковый вал; 13 – первый кулачковый вал; 14 – активные роторные вилки; 15 – мост управляемых колес; 16 – автомат вождения; 17 – механизм рулевого управления; 18 – трактор; 19 – гидросистема; 20 – копирующие колеса  Рис. 201. Автомат вождения по рядкам: 1 – кронштейн; 2 – кронштейн средний; 3 – рычаг суммирующий; 4 – тяга продольная; 5 – параллелограммная подвеска; 6 – стойкодержатель; 7 – регулировочные болты; 8 – капот; 9 – копир; 10 – шарнир копира; 11 – вал подъема копиров; 12 – пружина; 13 – рама автомата; 14 – корректирующий гидроцилиндр; 15 – рамка механизма Ходовая часть включает в себя ведущий мост и мост управляемых колес. Привод ведущих колес осуществляется цепными передачами от полуосей трактора. Выкапывающее устройство (рис. 203) предназначено для извлечения корней из почвы, очистки их от почвы и транспортировки на шнековый транспортер. Активная роторная вилка предназначена для подкапывания, подъема и извлечения корней свеклы из почвы. Битерный вал – шестигранный вал, на котором расположены лопасти из прорезиненной ленты. Битерный вал предварительно очищает и подаёт корни на кулачковые валы. Кулачковые валы очищают корнеплоды от почвы и перемещают их на шнековые очистители. Шнековые очистители предназначены для частичной очистки корнеплодов и передачи их на приемный транспортер. Транспортеры, установленные на машине МКК-6, прорезиненные, прутковые с цепной передачей и натяжными роликами. Приемный транспортер предназначен для приема корнеплодов с шнекового очистителя и передачи их на продольный транспортер. Он состоит из ведущего и ведомого валов, полотна и натяжных роликов. Продольный транспортер принимает корни с приемного транспортера и подает их на промежуточный транспортер. Состоит из ведущего вала с предохранительной муфтой, полотна и роликов. Промежуточный транспортер перемещает корнеплоды на погрузочный транспортер.  Рис. 202. Гидравлическая схема автомата вождения: 1 – копир-водитель; 2 – рычаг обратной связи; 3 – насос-дозатор гидроусилителя руля; 4 – кран-распределитель; 5 – золотник управляемых колес; 6 – корректирующий гидроцилиндр; 7 – рычаг золотника; 8 – гидроцилиндр рулевого управления 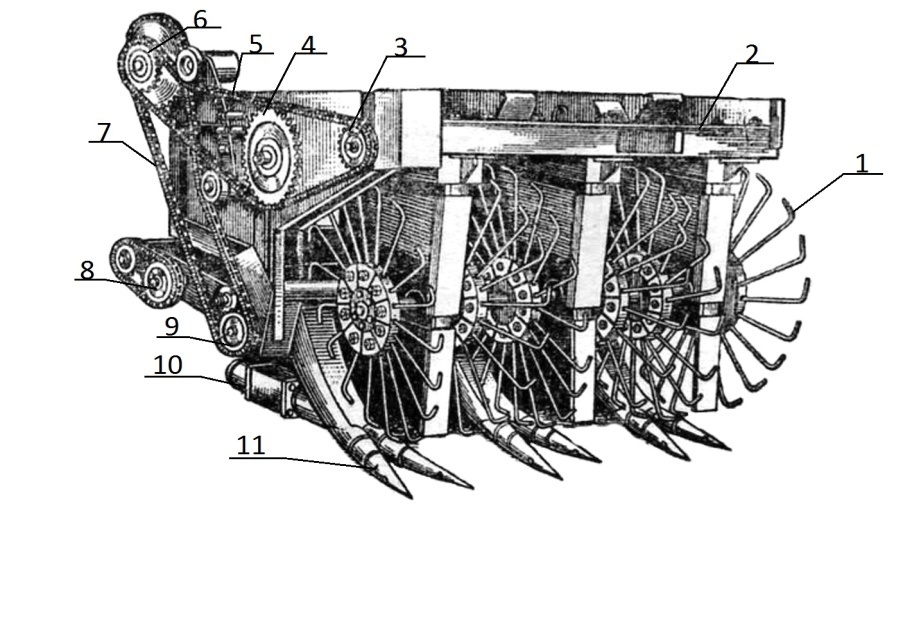 Рис. 203. Выкапывающее устройство: 1 – корнезаборник; 2 – рамка; 3 – вал привода корнезаборников; 4 – вал бичей; 5 – цепной привод бичей и корнезаборников; 6 – контрпривод; 7 – цепной привод вилок; 8 – четырехлопастной битерный вал; 9 – вал редуктора привода вилок; 10 – редуктор привода вилок; 11 – активная роторная вилка Погрузочный транспортер предназначен для погрузки корнеплодов в рядом идущий транспорт. Транспортер состоит (рис. 204) из трех частей: нижней 2, средней 5, верхней 16. Подвижная средняя часть соединена с неподвижной нижней, удерживается в нужном положении двумя гидроцилиндрами 4. Верхняя часть транспортера шарнирно соединена со средней и управляется гидроцилиндром 13. Для обеспечения минимальной высоты падения корнеплодов в транспортное средство возможно изменить угол наклона средней рамки. На раме установлена гребенка 10 и козырек 18, ведущий вал 9, полотно со скребками 11, ведомые 1 и поддерживающие ролики 14, 15. Трансмиссия предназначена для привода рабочих органов машины от ВОМ трактора. Она состоит из редукторов: распределительного, центрального и планетарного; промежуточных, карданных и соединительных валов, цепных передач, механизма включения поперечного и погрузочного транспортеров.  Рис. 204. Погрузочный транспортер: 1 – ведомый ролик; 2 – рама нижняя; 3 – блок звездочек; 4 – гидроцилиндр управления средней частью транспортера; 5 – рама средняя; 6 – щиток; 7 – звездочка z=15, t=25,4; 8 – козырек; 9 – вал ведущий; 10 – гребенка; 11 – скребок; 12 – полотно;13 – гидроцилиндр управления верхней частью; 14 – поддерживающий обрезиненный ролик; 15 – поддерживающий ролик металлический Основная гидросистема управляет положением рабочих органов. Состоит (рис. 205) из раздельно-агрегатной системы трактора, цилиндров управления положением рабочих органов: копателя 3, погрузочных транспортеров 5 и 12, планетарного редуктора 4 и гидролиний. Гидроцилиндры 3, 4 и 11 присоединены к правым, гидроцилиндр 5 – к заднему выводам гидросистемы трактора, а гидроцилиндр 12 – к выводам гидроцилиндра механизма навески трактора. Управление гидроцилиндрами производится распределителем трактора.  Рис. 205. Гидравлическая система машины МКК-6: 1 – гидроцилиндр управляемых колес; 2 – клапан замедлительный; 3 – цилиндр подъема рабочих органов; 4 – цилиндр механизма включения планетарного редуктора; 5 – цилиндры подъема средней части погрузочного транспортера; 6 – гидросистема трактора МТЗ-80/80л; 7 – гидроусилитель рулевого управления трактора; 8 – предохранительный клапан; 9 – золотник управляемых колес; 10 – гидрозамок; 11 – гидроцилиндр подъема копира; 12 – гидроцилиндр управления верхней частью погрузочного транспортера Система автоматического контроля и сигнализации предназначена для автоматического контроля вращения привода рабочих органов и сигнализации нарушений с указанием местоположения неисправного узла. Технологический процесс работы При помощи автомата вождения (рис. 206) 10 передние колеса машины направляют рабочие органы по рядкам. Корнеплоды подкапываются активными роторными вилками, а совместным действием кулачкового 7 и битерного 8 валов подбираются, предварительно очищаясь. Второй кулачковый вал перемещает корнеплоды на приемный транспортер 6, который подает их на шнековый очиститель 5. Корнеплоды очищаются и смещаются к центру машины на продольный транспортер 1, которым подаются на поперечный прутковый транспортер 2, затем погрузочным транспортером 3 корнеплоды перемещаются в кузов рядом идущего транспорта 4.  Рис. 206. Технологическая схема корнеуборочной машины МКК-6: 1 – продольный транспортер; 2 – поперечный транспортер; 3 – погрузочный транспортер; 4 – кузов транспорта; 5 – шнековый очиститель; 6 – приемный транспортер копателя; 7 – кулачковые валы; 8 – битерный вал; 9 – копач; 10 – автомат вождения; 11 – управляемые колеса Технологические регулировки Регулировка глубины хода вилок осуществляется изменением положения выкапывающих рамок, относительно рамки копирующих колес. Положение кулачкового вала относительно поверхности почвы изменяется копирующей лыжей и перестановкой разгружающего устройства. Регулировка производится путем поворотов задней части кронштейна. Разгружающее устройство устанавливается таким образом, чтобы разгрузить лыжи, не нарушая при этом стабильность хода подвижной рамки. Положение направителя изменяется перемещением его по стойке. Контрольные вопросы 1. Из каких основных сборочных единиц скомплектована машина МКК-6? 2. Из чего состоит выкапывающая секция? 3. Перечислите узлы гидросистемы автомата вождения. 4. Как отрегулировать глубину хода дисковых копачей? 5. Устройство и назначение погрузочного элеватора. 6. Опишите технологическую схему работы МКК-6. |