Лаб Метр1. Динмаический режим средств измерений
 Скачать 379.8 Kb. Скачать 379.8 Kb.
|

|
МИНОБРНАУКИ РОССИИ Санкт-Петербургский государственный электротехнический университет «ЛЭТИ» им. В.И. Ульянова (Ленина) Кафедра ИИСТ отчет по лабораторной работе №1(6) по дисциплине «Метрология» Тема: Динмаический режим средств измерений. Выполнил студент гр.1492: Чайкин И.А. Преподаватель: Минаев А.В. Санкт-Петербург 2023 Лабораторная работа 6.ДИНАМИЧЕСКИЙ РЕЖИМ СРЕДСТВ ИЗМЕРЕНИЙЦель работы изучение динамического режима средств измерений. ЗаданиеОзнакомиться с лабораторной установкой. Собрать схему исследования динамического звена 2-го порядка. Получить у преподавателя задание на выполнение лабораторной работы. Записать частоту f0 собственных колебаний и коэффициент демпфирования (степень успокоения)для заданных вариантов реализации динамического звена. Исследовать динамический режим заданных средств измерений при ступенчатом изменении входного сигнала. 2.1. Определить динамическую погрешность при заданных параметрах звена 2-го порядка и выбранных амплитуде и частоте входных сигналов прямоугольных импульсов; погрешность определить в 6…10 точках на одном полупериоде входного сигнала. Построить графики входного и выходного сигналов исследуемого средства. Построить графики динамической погрешности. По результатам исследований сделать выводы о влиянии f0 и/или на характер изменения выходного сигнала и динамическую погрешность. 2.2. Определить время tу установления выходного сигнала для различных частот f0i собственных колебаний при заданном коэффициенте демпфирования . Построить график зависимости tу = F(f0i) при = const. При определении времени установления принять погрешность асимптотического приближения переходного процесса, равную 5 % от установившегося значения. 2.3. Определить время tу установления выходного сигнала для различных коэффициентов i демпфирования при заданной частоте f0 собственных колебаний. Построить график зависимости tу = F(i) при f0 = const. По результатам пунктов 2.2, 2.3 сделать выводы о влиянии f0 и на время установления tу. Исследовать динамический режим средств измерений при синусоидальном входном воздействии. Определить погрешности в динамическом режиме при указанных параметрах (f0, ) звена 2-го порядка и заданной частоте входного сигнала; погрешности определить в 8…10 точках на одном периоде сигнала. Построить графики входного и выходного сигналов, график динамической погрешности. Сделать вывод о характере изменения динамической погрешности и оценить ее максимальное (амплитудное) значение. Описание и порядок выполнения работыОбщие сведения. Изменение входного сигнала во времени может значительно повлиять на результаты измерений. Важными при этом являются, во-первых, характер изменения сигнала, т. е. его динамические свойства, и, во-вторых, «скорость реакции» средства измерений на входное воздействие, определяемая динамическими характеристиками этого средства. В таких случаях говорят о динамическом режиме средства измерений. При анализе динамического режима средств измерений оказывается весьма удобным рассматривать идеальные и реальные средства измерений, сопоставляя реакцию этих средств на одни и те же входные воздействия. Идеальные в динамическом смысле средства измерений СИи, иначе безынерционные, имеют, как правило, линейную зависимость выходного сигнала yи(t) от входного x(t): yи(t) = kнx(t), где kн – номинальный коэффициент преобразования. Очевидно, что в таких средствах измерений выходной сигнал во времени полностью повторяет входной с точностью до множителя kн. В  реальных средствах измерений СИр выходной сигнал y(t) в силу указанных причин будет иметь более сложную зависимость от входного сигнала, в частности, описываемую дифференциальными уравнениями соответствующего порядка. Разность между выходным сигналом y(t) реального средства измерений и выходным сигналом yи(t) (сигнал идеального средства измерений) при одном и том же входном сигналеx(t) определяет динамическую погрешность по выходу реального средства СИр измерений: y(t) = y(t) – yи(t).1 (6.1) Рисунок 6.1 иллюстрирует возможный вариант входногоx(t) и выходных yи(t), y(t) сигналов идеального и реального средств измерений и возникающую при этом динамическую погрешность y(t). На рис. 6.2 показана структурная схема, удобная для интерпретации и оценки возникающей динамической погрешности. Структурная схема лабораторной установки. Лабораторная установка состоит из трех основных блоков: унифицированной вертикальной стойки, включающей источники питания, генератор сигналов прямоугольной, синусоидальной и треугольной формы и измерительные приборы – цифровой частотомер и два цифровых вольтметра; двухканального электронно-лучевого осциллографа; специализированного горизонтального модуля, предназначенного для выполнения конкретной лабораторной работы – исследования динамического режима средств измерений. В специализированном горизонтальном модуле находится объект исследования – фильтр нижних частот (ФНЧ) 2-го порядка, в котором предусмотрена возможность дискретного изменения частоты собственных колебаний 4 положения, и коэффициента демпфирования (или степени успокоения) так же 4 положения. Различным сочетанием этих параметров достигается широкий диапазон изменения динамических характеристик объекта исследования. Ручки переключения соответствующих параметров установлены на лицевой панели пульта в правой верхней его части. Структурная схема лабораторной установки представлена на рис. 6.3, где ЭЛО – двухканальный электронно-лучевой осциллограф, имеющий вход по оси Z; приборы, установленные на вертикальном стенде: ГС – генератор сигналов прямоугольной, синусоидальной и треугольной формы, ЦВ1 и ЦВ2 – цифровые вольтметры, ЦЧ – цифровой частотомер; устройства, встроенные в горизонтальный пульт (на схеме обведены штриховой линией): ФНЧ – фильтр нижних частот, УВХ1 и УВХ2 – устройства выборки и хранения мгновенных значений напряжений входного и выходного сигналов ФНЧ соответственно, блок синхронизации («Синхронизация»), блок управления выборкой («Управление выборкой»). Управление временем выборки осуществляется двумя потенциометрами, установленными в нижней правой части передней панели модуля. Рекомендации по сборке схемы. При сборке принципиальной схемы, соответствующей структурной схеме (рис. 6.3), все связи реализуются двухпроводными линиями с соблюдением «земляных» зажимов. Входы Y1, Y2, Z осциллографа имеют коаксиальные кабели. Перед проведением экспериментов необходимо совместить начальную установку лучей по обоим каналам осциллографа и установить одинаковые коэффициенты отклонений, удобные для визуального наблюдения. Установить коэффициент развертки, при котором на экране осциллографа наблюдается один период (или полупериод) входного сигнала. 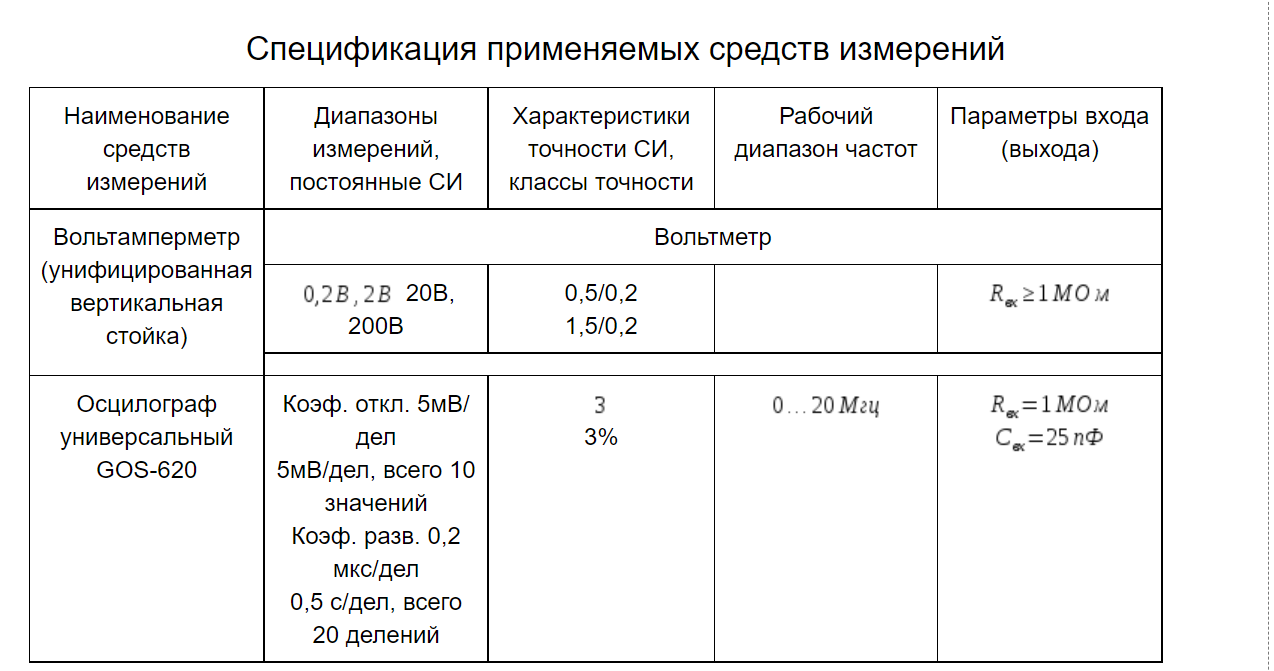 Обработка результатов. Задание 1.Построение графиков входного и выходного сигналов, определение динамической погрешности и времени сигналов при ступенчатом режиме. Таблица.1 при f0=0.4 и B=0.3
Г 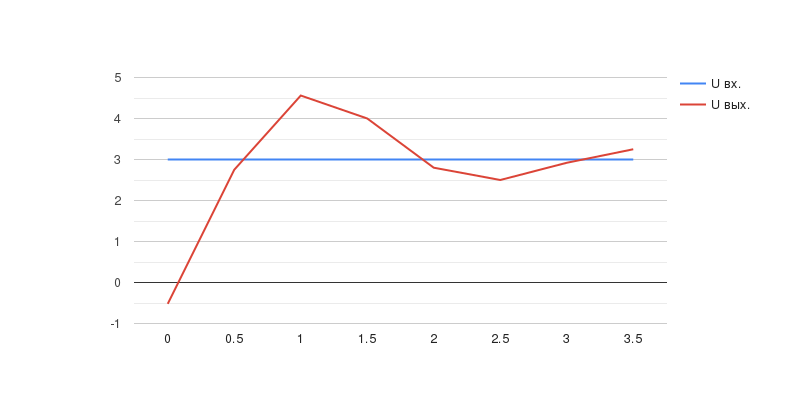 рафик.1 рафик.1Таблица.2 при f0=0.4 и B=0.7
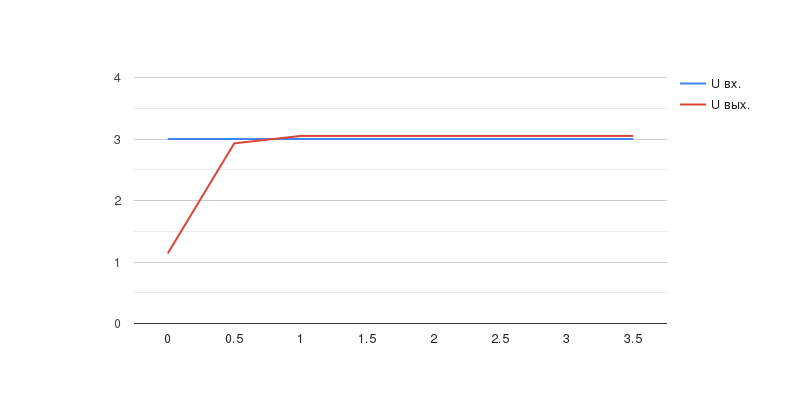
Г 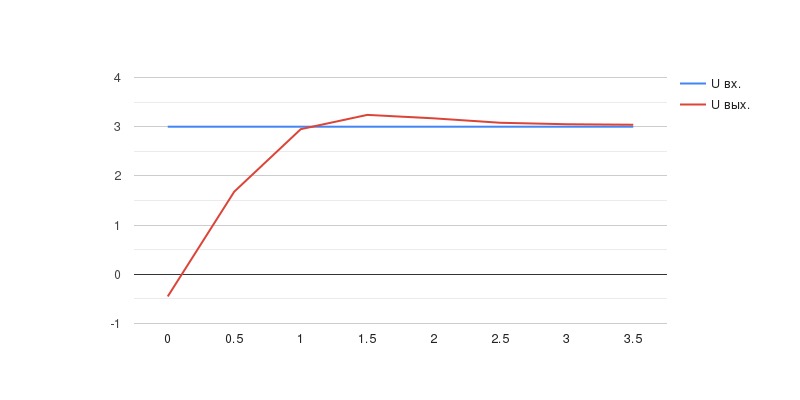 рафик. 2 рафик. 2Таблица.3 при f0=0.4 и B=1
Г 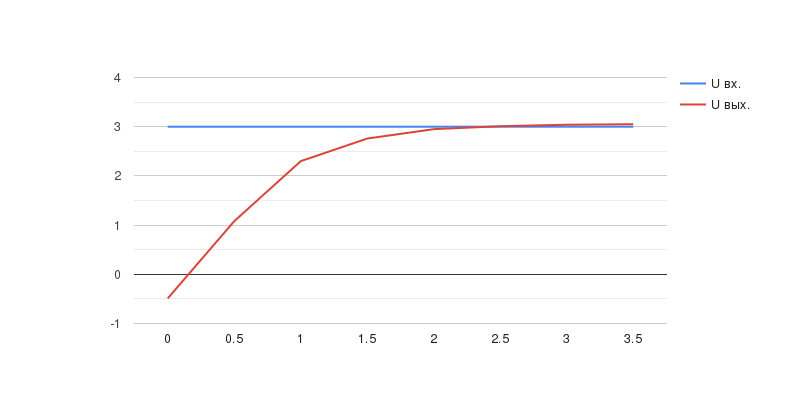 рафик 3. рафик 3.Таблица.4 при f0=0.4 и B=2
Г 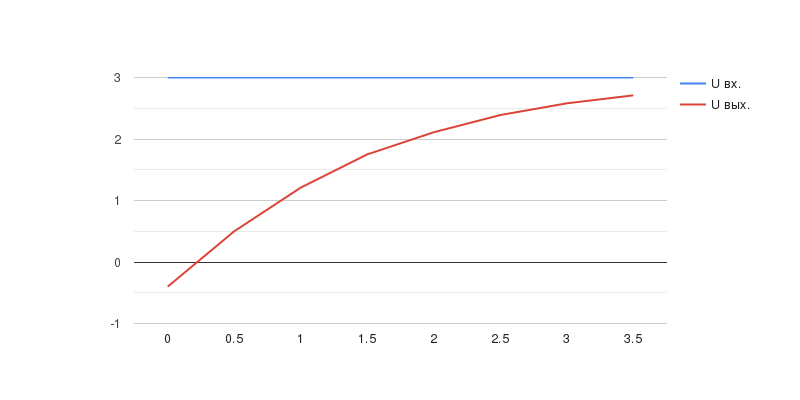 рафик 4. рафик 4.Таблица.5 при f0=0.8 и B=0.3
Г 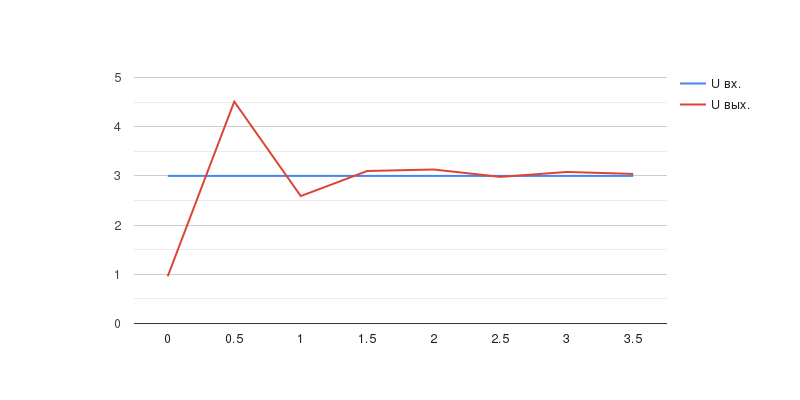 рафик 5. рафик 5.Таблица.6 при f0=0.8 и B=0.7
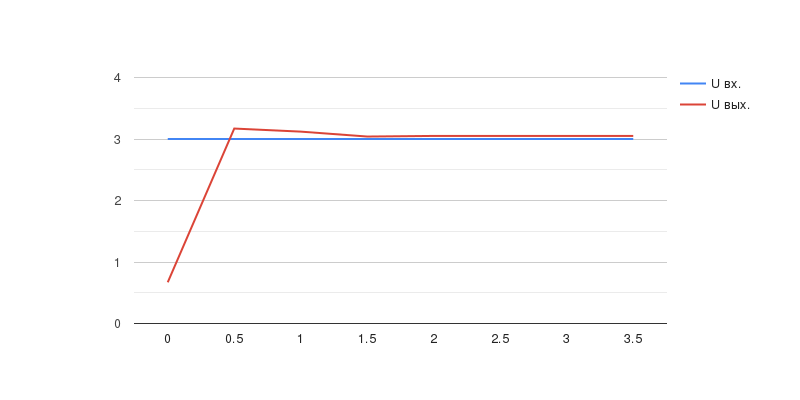 График 6. Таблица.7 при f0=0.8 и B=1
Г 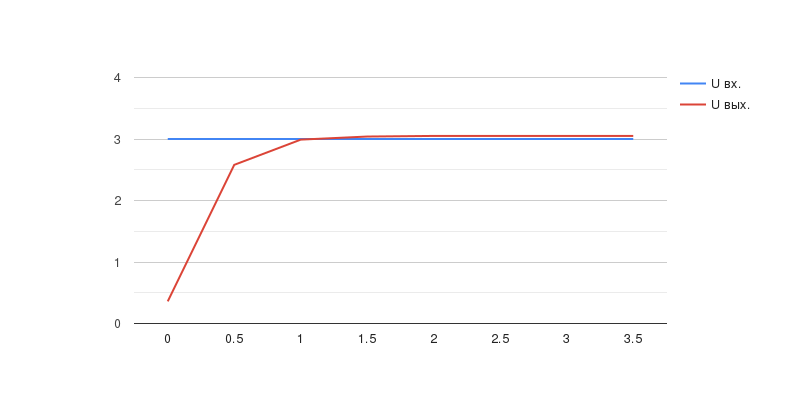 рафик 7. рафик 7.Таблица.8 при f0=0.8 и B=2
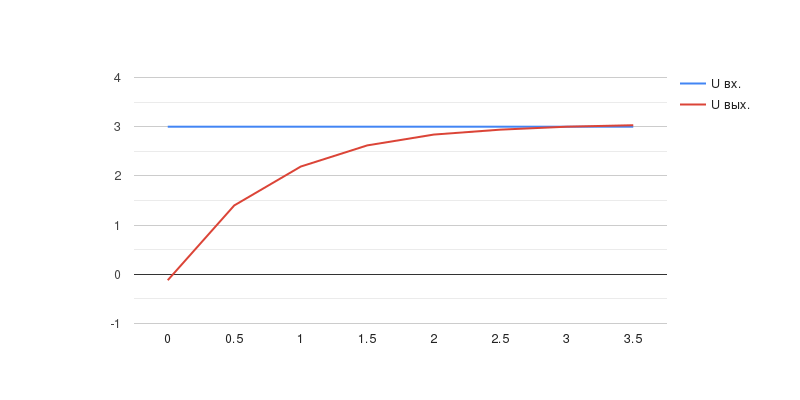 График 8. Таблица.9 при f0=1.2 и B=0.3
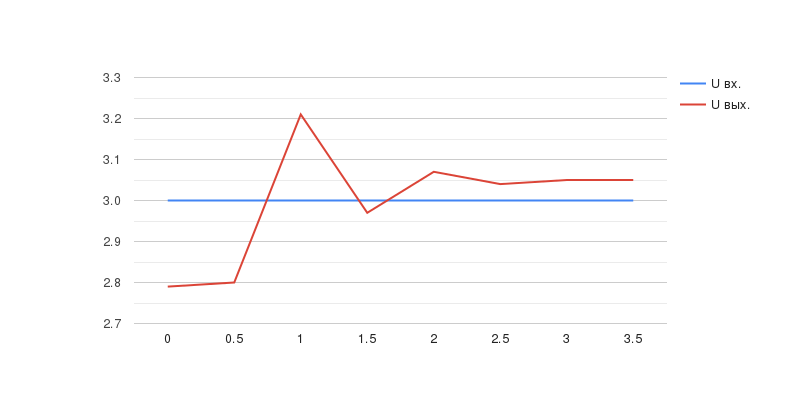 График 9. Таблица.10 при f0=1.2 и B=0.7
Г 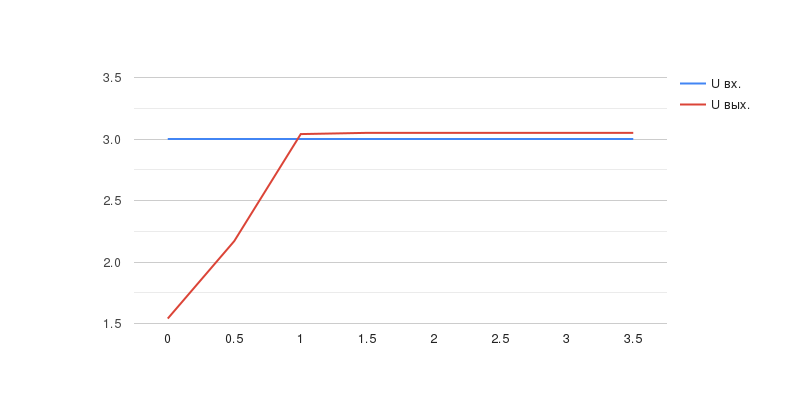 рафик 10. рафик 10.Таблица.11 при f0=1.2 и B=1
График 11. Таблица.12 при f0=1.2 и B=2
Г 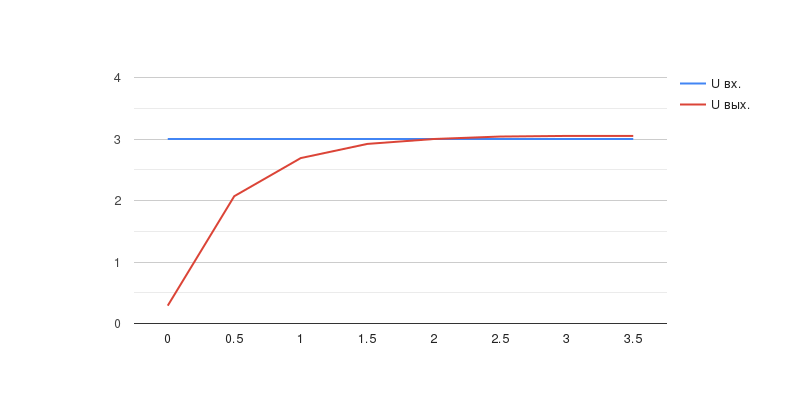 рафик 12. рафик 12.Таблица.13 при f0=1.6 и B=0.3
Г 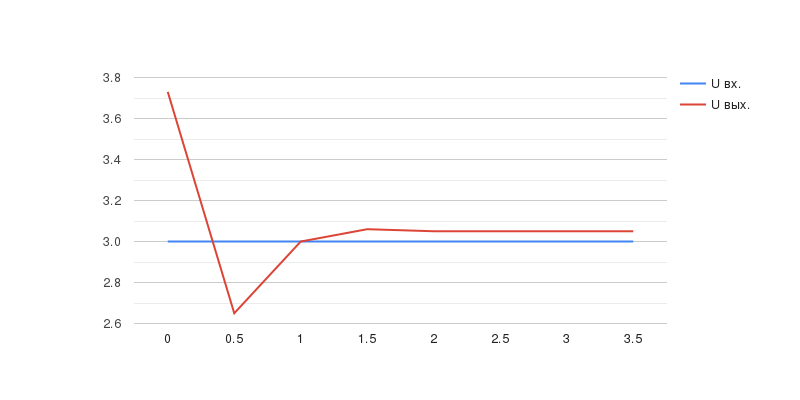 рафик 13. рафик 13.Таблица.14 при f0=1.6 и B=0.7
Г 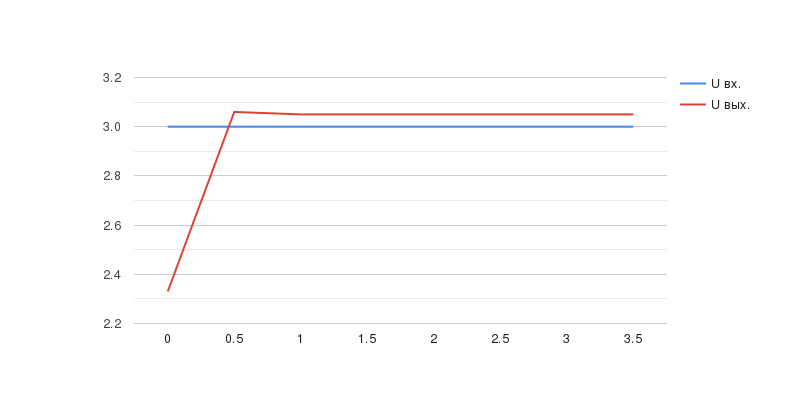 рафик 14. рафик 14.Таблица.15 при f0=1.6 и B=1
Г 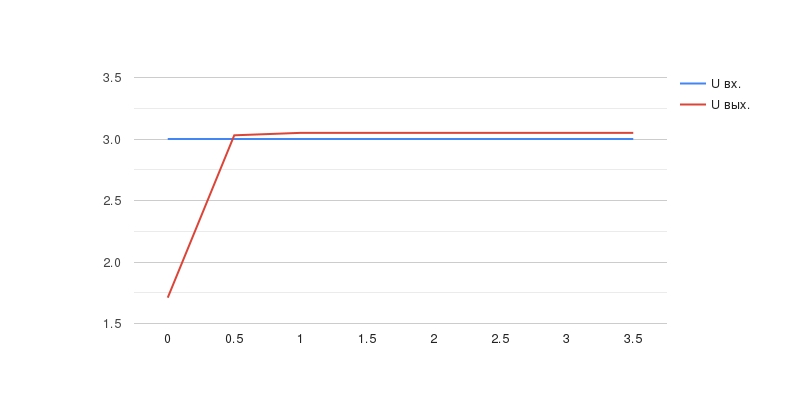 рафик 15. рафик 15.Таблица.16 при f0=1.6 и B=2
Г 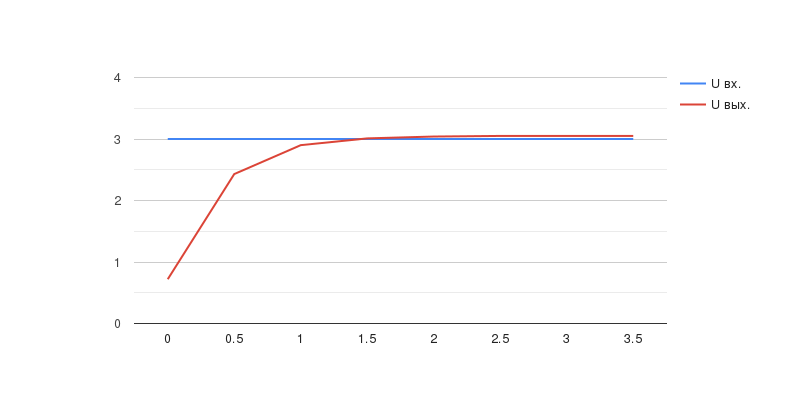 рафик 16. рафик 16.Задание 2. Построение графиков зависимостей времени установления от собственной частоты колебаний и коэффициента демпфирования при заданных отдельных параметрах Таблица 1.
Таблица 2.
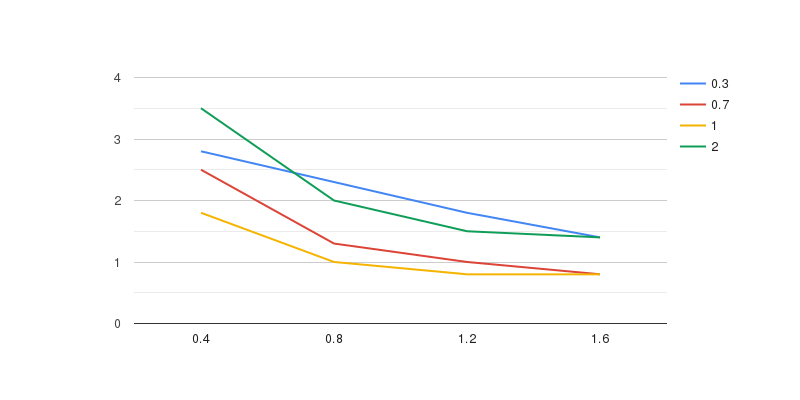 График 1. Г 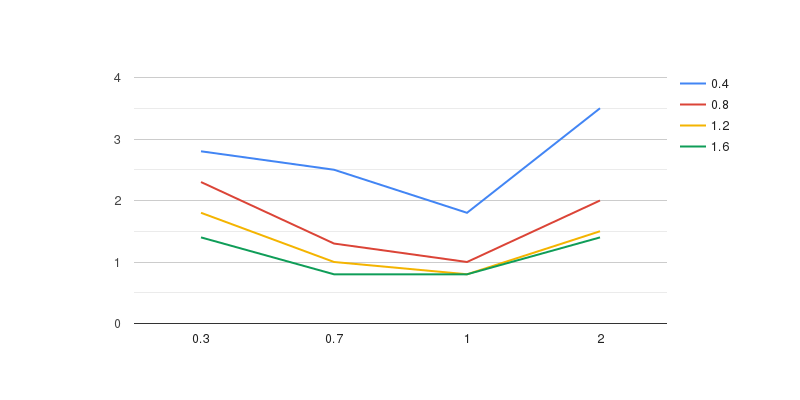 рафик 2. рафик 2.Задание 3. Построение графика входного и выходного сигналов при синусоидальном режиме. Таблица 1.
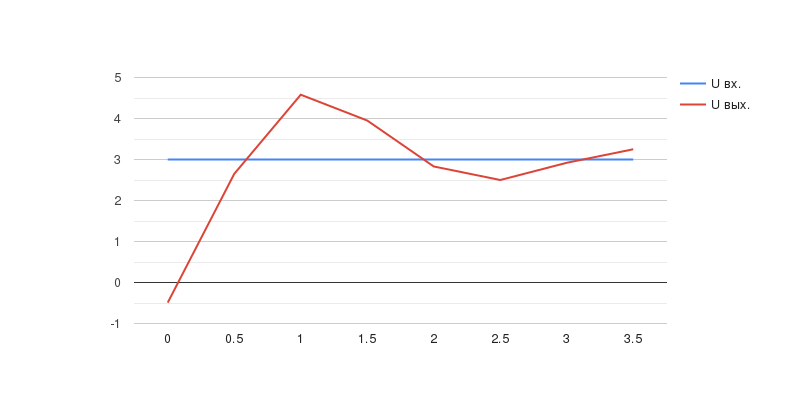 График 1.
|
 U
U