Динамический режим средств измерения. Схема лабораторной установки
 Скачать 186.33 Kb. Скачать 186.33 Kb.
|

|
Цель работы: изучение динамического режима средств измерений Схема лабораторной установки: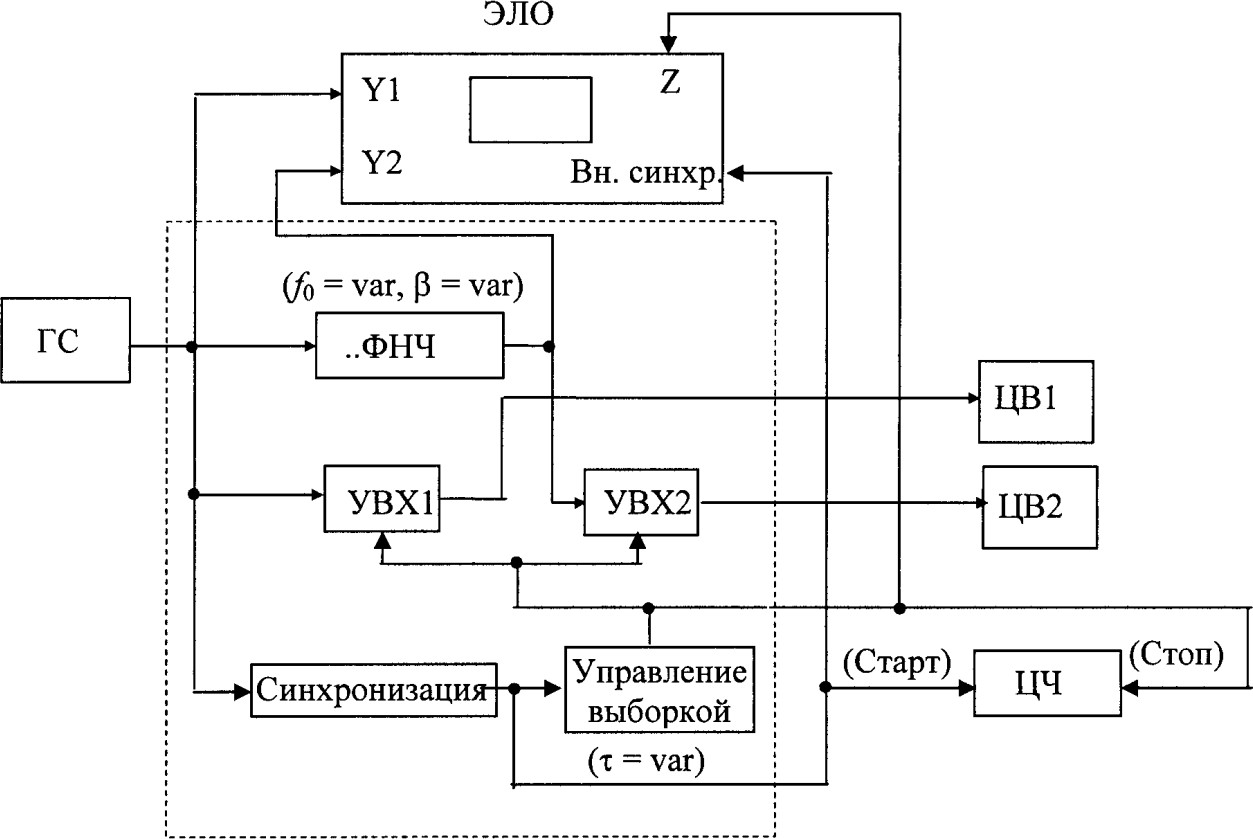 Рисунок 1. Схема лабораторной установки. ГС – генератор сигналов прямоугольной, синусоидальной и треугольной формы; ЦВ1 и ЦВ2 – цифровые вольтметры; ЦЧ – цифровой частотомер; ЭЛО – двухканальный электронно-лучевой осциллограф; устройства встроенные в горизонтальный пульт (в штриховой рамке): блок синхронизации; блок управления выборкой; УВХ1 и УВХ2 – устройства выборки и хранения мгновенных значений напряжений входного и выходного сигналов ФНЧ соответственно; ФНЧ – фильтр нижних частот; Теоретические положения:Изменение входного сигнала во времени влияет на результат измерений. Важным при этом являются характер изменение сигнала, т.е. его динамические свойства, и «скорость реакции» средства измерений на входное воздействие, определяемая динамическими характеристиками этого средства. В таких случаях говорят о динамическом режиме средств измерений. При анализе динамического режима средств измерения удобно рассматривать идеальные и реальные средства измерений, сопоставляя реакцию этих средств на одни и те же выходные воздействия. Идеальные в динамическом смысле средства измерения СИи, иначе безынерционные, имеют, как правило, линейную зависимость выходного сигнала yи(t)от входного x(t):yи(t)=kнx(t), где kн – номинальный коэффициент преобразования. Очевидно, что в таких средствах измерения выходной сигнал во времени полностью повторяет входной сигнал с точностью до множителя kн. В реальных средствах измерения СИр выходной сигнал y(t) в силу указанных причин будет иметь более сложную зависимость от входного сигнала, в частности, описываемую дифференциальными уравнениями соответствующего порядка. Разность между выходным сигналом y(t) реального средства измерений и выходным сигналом yи(t) (сигнал СИи) при одном и том же выходном сигнале x(t) определяет динамическую погрешность по выходу реального средства СИр измерений: ∆𝑦(𝑡) = 𝑦(𝑡) − 𝑦и(𝑡). (1) 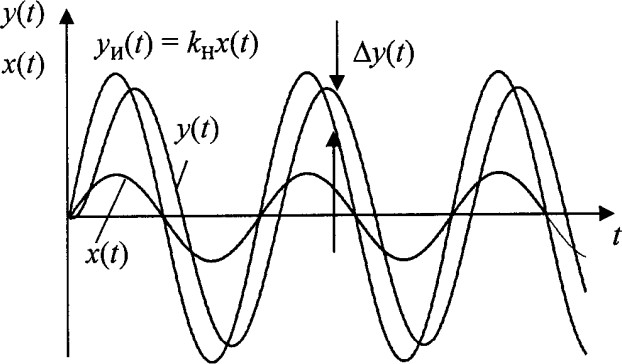 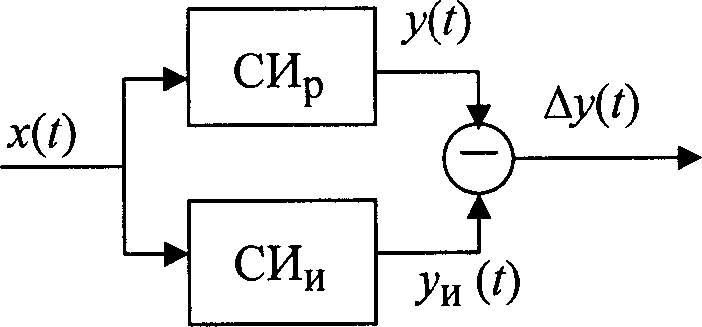 Замечание:в общем случае выражение (1) включает в себя и статистическую и динамическую погрешности средств измерений. Однако в данной работе будем считать, что статистическая погрешность пренебрежимо мала. Замечание:в общем случае выражение (1) включает в себя и статистическую и динамическую погрешности средств измерений. Однако в данной работе будем считать, что статистическая погрешность пренебрежимо мала.Рисунок 2. Вариант сигналов измерений. Рисунок 3. Схема оценки динамической погрешности. Рисунок 2 иллюстрирует возможный вариант входного x(t) и выходных yи(t), y(t) сигналов идеального и реального средств измерений и возникающую при этом динамическую погрешность ∆y(t). На рис. 3 показана структурная схема, удобная для интерпретации и оценки возникающей динамической погрешности. Спецификация применяемых средств измерений:
Протокол наблюдений к лабораторной работе №6«Динамический режим средств измерения» Затухающий сигнал: Kp=1 мс/дел; k0=2 В/дел; f0=0,4 кГц; ß=0,3
 Время установления: Время установления:
Два синусоидальных сигнала: f0=0,4 кГц; ß=2
Обработка результатов:1. Определим динамическую погрешность при ступенчатом входном воздействии, ∆𝑈(𝑡) = 𝑈вых(𝑡) − 𝑈вх(𝑡) t’=Kpt Таблица 1. Динамический режим измерений при прямоугольном воздействии.
Пример расчёта: ∆𝑈(1,6) = 𝑈вых(1,6) − 𝑈вх(1,6) = −3,93 − 3,79 = −7,72; U, B  ∆𝑈(2,1) = 𝑈вых(2,1) − 𝑈вх(2,1) = 4,03 − 3,79 = 0,24. ∆𝑈(2,1) = 𝑈вых(2,1) − 𝑈вх(2,1) = 4,03 − 3,79 = 0,24. ∆U, B  Рисунок 4. Графики входного и выходного сигналов при ступенчатом воздействии. Рисунок 4. Графики входного и выходного сигналов при ступенчатом воздействии. Рисунок 5. График динамической погрешности при ступенчатом воздействии. Построение графика зависимости времени установления для различных частот при заданном коэффициенте демпфирования: ty , мс  Таблица 2. Зависимость времени установления от частоты. Таблица 2. Зависимость времени установления от частоты.
Рисунок 6. График зависимости времени установления от частоты. Построение графика зависимости времени установления для различных коэффициентов демпфирования при заданной частоте: Таблица 3. Изменение времени установления от коэффициента демпфирования.
ty , мс  Рисунок 7. График зависимости времени установления от коэффициента демпфирования. Рисунок 7. График зависимости времени установления от коэффициента демпфирования.3. Определим динамическую погрешность при входном синусоидальном воздействии, ∆𝑈(𝑡) = 𝑈вых(𝑡) − 𝑈вх(𝑡) t’=Kpt Таблица 4. Динамический режим при синусоидальном воздействии
Пример расчёта: ∆𝑈(0) = 𝑈вых(0) − 𝑈вх(0) = 1.68 − 2.89 = −1.21; ∆𝑈(1) = 𝑈вых(1) − 𝑈вх(1) = 3.06 − 3,90 = −0,84. U, B ∆U, B   Рисунок 8. Графики входного и выходного сигналов при синусоидальном воздействии. Рисунок 8. Графики входного и выходного сигналов при синусоидальном воздействии. Рисунок 9. График динамической погрешности при синусоидальном воздействии. Вывод: в ходе лабораторной работы был изучено понятие динамического режима измерений и динамической погрешности. При анализе данных было выявлено, что при увеличении частоты колебаний время установления уменьшается, а при увеличении коэффициента демпфирования время сначала уменьшается, пока не дойдёт до своего минимального значения, а потом растёт вместе с коэффициентом демпфирования. При синусоидальном режиме динамическая погрешность меняется по закону, похожему на синусоидальный. При ступенчатом воздействии динамическая погрешность стремиться к нулю по мере продолжительности сигнала. | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||