доклад. Технология глобальной спутниковой навигации. Доклад представляет собой глобальные системы позиционирования, разработанные в сша, России, ес и Китае объяснение, как поддержка технологий глобальной спутниковой навигации реализована в электронных устройствах,
 Скачать 1.11 Mb. Скачать 1.11 Mb.
|

|
Технология глобальной спутниковой навигации: какие бывают системы, параметры и функции  Доклад представляет собой глобальные системы позиционирования, разработанные в США, России, ЕС и Китае; объяснение, как поддержка технологий глобальной спутниковой навигации реализована в электронных устройствах, а также описание ключевых и дополнительных функции современных навигационных приемников. GPS  Система GPS (Global Positioning System) создавалась для применения в военных целях. Она начала работать в конце 80-х — начале 90-х годов, однако до 2000 года искусственные ограничения на определение местоположения существенно сдерживали ее возможности использования в гражданских целях. После отмены ограничений на точность определения координат ошибка снизилась со 100 до 20 м (в последних поколениях GPS-приёмников при идеальных условиях ошибка не превышает 2 м). Такие условия позволили использовать систему для широкого круга общих и специальных задач: Определение точного местоположения Навигация, движение по маршруту с привязкой к карте на основании реального местоположения Синхронизация времени  Орбиты спутников системы GPS. Пример видимости спутников из одной из точек на поверхности Земли. Visible sat — это число спутников, видимых над горизонтом наблюдателя в идеальных условиях (чистое поле). ГЛОНАСС  Российский аналог GPS — ГЛОНАСС (глобальная навигационная спутниковая система) — была развёрнута в 1995 году, но в связи с недостаточным финансированием и малым сроком службы спутников она не получила широкого распространения. Вторым рождением системы можно считать 2001 год, когда была принята целевая программа ее развития, благодаря которой ГЛОНАСС возобновил полноценную работу в 2010 году. Сегодня на орбите работают 24 спутника ГЛОНАСС, они охватывают навигационным сигналом весь земной шар. Новейшие потребительские устройства используют GPS и ГЛОНАСС как взаимодополняющие системы, подключаясь к ближайшим найденным спутникам, это значительно увеличивает скорость и точность их работы.  Пример: aвтомобильное GPS/ГЛОНАСС-навигационно-связное устройство на базе ОС Android, разработанное командой Promwad по заказу российского конструкторского бюро. Реализована поддержка GSM/GPRS/3G. Устройство автоматически обновляет информацию о дорожной обстановке в режиме реального времени и предлагает водителю оптимальный маршрут с учётом загруженности дорог. Сейчас на стадии разработки находятся еще две спутниковые системы: европейская Galileo и китайская Compass. Galileo  Галилео — совместный проект Европейского союза и Европейского космического агентства, анонсированный в 2002 году. Изначально рассчитывали, что уже в 2010 году в рамках этой системы на средней околоземной орбите будут работать 30 спутников. Но этот план не был реализован. Сейчас предположительной датой начала эксплуатации Galileo считается 2014 год. Однако ожидается, что полнофункциональное использование системы начнется не ранее 2020 года. Compass  Это следующая ступень развития китайской региональной навигационной системы Beidou, которая была введена в эксплуатацию после запуска 10 спутников в конце 2011 года. Сейчас она обеспечивает покрытие в границах Азии и Тихоокеанского региона, но, как ожидается, к 2020 году система станет глобальной. 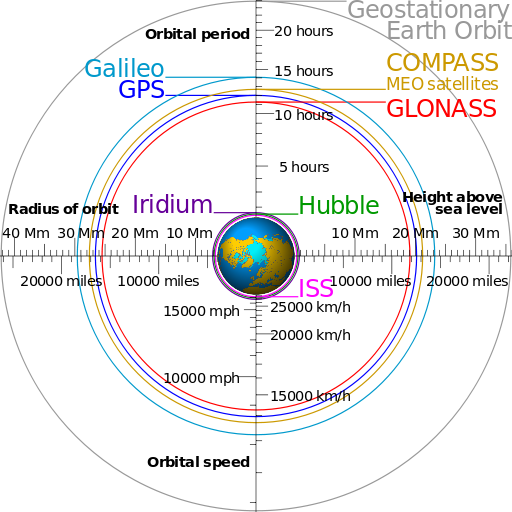 Сравнение орбит спутниковых навигационных систем GPS, ГЛОНАСС, Galileo и Compass (средняя околоземная орбита — MEO) с орбитами Международной космической станции (МКС), телескопа Хаббл и серии спутников Иридиум (Iridium) на низкой орбите, а также геостационарной орбиты и номинального размера Земли. Поддержка ГНСС Поддержка технологи глобальных навигационных спутниковых систем (ГНСС) в электронных устройствах реализуется на базе навигационных приемников, которые могут быть выполнены в различных вариантах: Smart Antenna — модуль, состоящий из керамической антенны и навигационного приемника. Преимущества: компактность, не требует согласования, удешевляет разработку за счет сокращения сроков. MCM (Multi Chip Module) — чип, включающий все компоненты навигационного приемника. OEM — экранированная плата, включающая ВЧ интерфейсный процессор и процессор частот основной полосы (RF-frontend + baseband), SAW-фильтры и обвязку. Это наиболее популярное решение на данный момент. Навигационный модуль подключается к микроконтроллеру или системе на кристалле по интерфейсу UART/RS-232 или USB. Ключевые параметры навигационных приемников Прежде чем навигационный приемник сможет выдавать информацию о местоположении, он должен обладать тремя наборами данных: Сигналы от спутников Альманах — информация о приблизительных параметрах орбит всех спутников, а также данные для калибровки часов и характеристики ионосферы Эфемериды — точные параметров орбит и часов каждого спутника Характеристика TTFF показывает сколько времени требуется приемнику на поиск сигналов от спутников и определение местоположения. Если приёмник новый, или был выключен на протяжении длительного периода, или был перевезен на большое расстояние с момента последнего включения, время до получения набора необходимых данных и определения места увеличивается. Производители приемников используют различные методы уменьшения TTFF, включая скачивание и сохранения альманаха и эфемерид по беспроводным сетям передачи данных (т.н. метод Assisted GPS или A-GPS), это быстрее чем извлечение этих данных из сигналов ГНСС. Холодный старт описывает ситуацию, когда приемнику нужно получение всей информации для определения места. Это может занять до 12 минут. Теплый старт описывает ситуацию, когда у приемника есть почти вся необходимая информация в памяти, и он определит место в течении минуты. Одним из ключевых параметров навигационных модулей в мобильных устройствах является энергопотребление. В зависимости от режима работы модуль потребляет различное количество энергии. Фаза поиска спутников (TTFF) характеризуется большим, а слежение меньшим энергопотреблением. Также производители реализуют различные схемы уменьшения энергопотребления, например, путем периодического перевода модуля в режим сна. Как правило, все модули выдают данные по текстовому протоколу NMEA-0183, но кроме указанного текстового протокола каждый производитель имеет свой собственный двоичный протокол (Binary), который позволяет изменять конфигурацию модуля под конкретное использование либо получать доступ к дополнительному функционалу, а также доступ к сырым измерениям. Двоичный протокол удобен для использования на микроконтроллерах, т.к. при этом нет необходимости выполнять преобразование из текста в двоичные данные, тем самым экономя программную память путем исключения библиотеки работы со строками и времени на преобразование. Стандарт NMEA-2000 — это развитие протокола NMEA-0183. В качестве физического уровня в NMEA-2000 используется CAN-шина, которая была выбрана в виду большей защищенности по сравнению с RS-232. С точки зрения протокола передачи данныхNMEA-2000 существенно отличается от своего предшественника, т.к. использует двоичный протокол, базирующийся на стандарте SAE J1939. Частота обновления данных о местоположении и скорости всех модулей составляет 1 Гц, но при необходимости ее можно поднять до 5 или 10 Гц. В зависимости от области применения модуль можно сконфигурировать под определенные динамические характеристики, которые он должен отслеживать (например, максимальное ускорение объекта). Это позволяет использовать оптимальный алгоритм и улучшать качество измерений. Для выполнения навигационной задачи модуль должен одновременно принимать сигналы от нескольких спутников, т.е. иметь несколько приемных каналов. На сегодняшний день это число лежит в диапазоне от 12 до 88. Точность определения местоположения по GPS составляет в среднем 15 м, она обусловлена используемым неточным сигналом, влиянием атмосферы на распространение радиосигнала, качеством кварцевых генераторов в приемниках и пр. Но с помощью корректирующих методов возможно улучшить точность определения местоположения. Эта технология называется Differential GPS. Существует два метода коррекции: наземный и спутниковый DGPS. В наземных методах коррекции наземные станции дифференциальных поправок постоянно сверяют свое заведомо известное местоположение и сигналы от навигационных спутников. На базе этой информации вычисляются корректирующие величины, которые могут быть переданы с помощью УКВ- или ДВ-передатчика на мобильные DGPS-приемники в формате RTCM. На основании полученной информации потребитель может корректировать процесс определения собственного местоположения. Точность этого метода составляет 1—3 метра и зависит от расстояния до передатчика корректирующей информации и качества сигнала. Спутниковые методы, такие как система WAAS (Wide Area Augmentation System), доступная в Северной Америке, и система EGNOS (European Geostationary Navigation Overlay System), доступная в Европе, шлют корректирующие данные с геостационарных спутников, таким образом достигается большая область приема, чем при наземных методах. 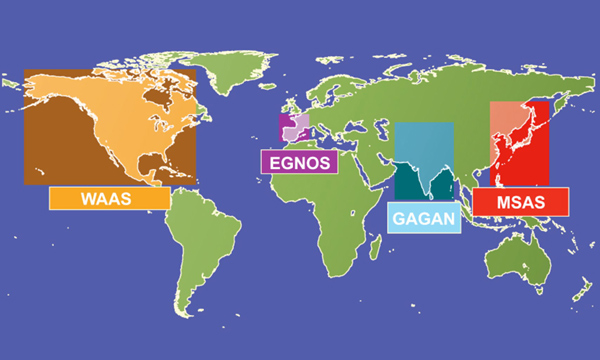 Спутниковые системы дифференциальной коррекции (SBAS — Space Based Augmentation Systems) позволяют улучшить точность, надежность и доступность навигационной системы за счет интеграции внешних данных в процессе расчета 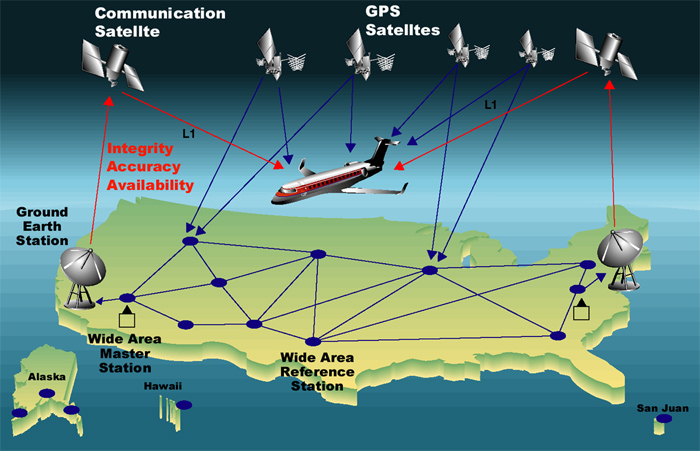 Демонстрация принципа работы системы WAAS (Wide Area Augmentation System) на территории США Одним из основных параметров, влияющих на точность определения местоположения и стабильность приема является чувствительность. Она, как правило, определяется качеством малошумящего усилителя на входе приемника и сложностью реализованных алгоритмов цифровой обработки. Типовые значения современных приемников лежат в диапазоне 143 дБм для поиска и 160 дБм для слежения. Кроме определения местоположения ГНСС предоставляют информацию о точном времени. Как правило, все приемники имеют выход PPS (pulse per second, импульсов в секунду) — секундная метка (1 Гц), которая точно синхронизирована с временной шкалой UTC. Дополнительные функции навигационных устройств Счисление пути. На основе информации о направлении движения и пройденном пути (предоставляется дополнительными датчиками) приемник может рассчитывать свои координаты при отсутствии сигналов от спутников (например, в туннелях, на подземных стоянках и в плотной городской застройке). Некоторые модули имеют возможность напрямую подключать флэш-память (например, по SPI) к модулю для записи трека c необходимой периодичностью. Эта функция позволяет отказаться от использования отдельного микроконтроллера, либо она может быть полезной для минимизации энергопотребления (т.е. система на кристалле может находиться в состоянии сна). |