Электрический привод семестровое задание двигатель постоянного тока независимого возбуждения
 Скачать 241.43 Kb. Скачать 241.43 Kb.
|

|
Министерство науки и высшего образования Российской Федерации Федеральное государственное автономное образовательное учреждение высшего образования « Политехнический институт Кафедра «Электропривод, мехатроника и электромеханика» Электрический привод СЕМЕСТРОВОЕ ЗАДАНИЕ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА НЕЗАВИСИМОГО ВОЗБУЖДЕНИЯ Вариант 20 Выполнил студент группы ПЗз-471 Проверил, к.т.н., доцент Сычев Д.А. CОДЕРЖАНИЕ: 1) Выбор варианта работы 3 2) Предварительные расчёты и построения 4 3) Аппроксимированные частотные характеристики 4 4) Частотные характеристики в MatLab 5 5) Переходные характеристики 6 6) Сравнительный анализ результатов 5 7) Выводы по работе 5
Общий вид структурной схемы данной лабораторной работы представлен на рис. 1.  Рис. 1. Структурная схема последовательного соединения звеньев Параметры, значения которых представлены двумя числами (2/4), представлены для двух вариаций заданного варианта (2 – для первой вариации, 4 – для второй вариации). 2) Предварительные расчёты и построения Для двигателя постоянного тока с параллельным возбуждением требуется: Рассчитать пусковой реостат и построить пусковые характеристики, если на валу Определить сопротивление, которое необходимо включать в цепь якоря, чтобы частота вращения двигателя при номинальном моменте составляла Рассчитать сопротивление, которое следует включить в якорную цепь, чтобы при изменении полярности питающего напряжения якоря ток его был равен при номинальной скорости. Построить эту механическую характеристику; Рассчитать дополнительное сопротивление, ограничивающее в режиме динамического торможения пик тока до Указать в чем недостатки реостатного регулирования, оценить его КПД. По номинальным данным строим механическую характеристику:    Определяем моменты: а) пусковой ( б) Переключения пусковых ступеней ( Полученные характеристики представлены на рисунке 2. 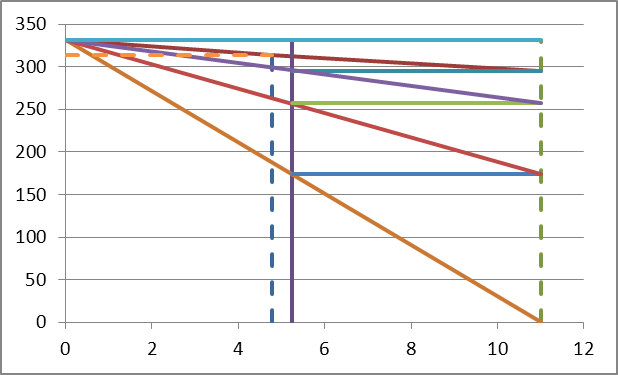 Рис.2. Технические характеристики двигателя 3) Аппроксимированные частотные характеристики Определяем пусковой резистор Определяем пусковой резистор Определяем пусковой резистор Запишем уравнение механической характеристики с учетом требуемых значений параметров: т.к. Запишем уравнение скоростной характеристики с учетом требуемых значений параметров: 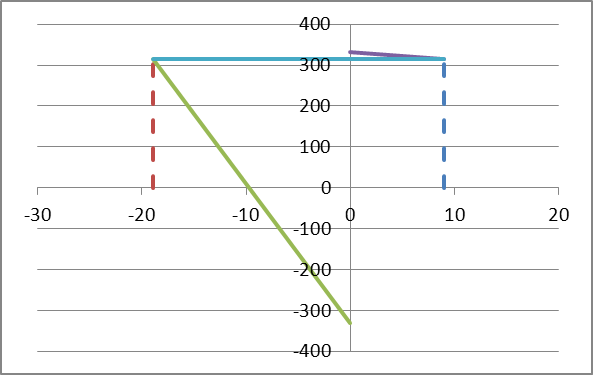 Рис. 3. Характеристика при смене питающего напряжения якоря, при токе 4) Частотные характеристики в MatLab: Рассчитать дополнительное сопротивление, ограничивающее в режиме динамического торможения пик тока до 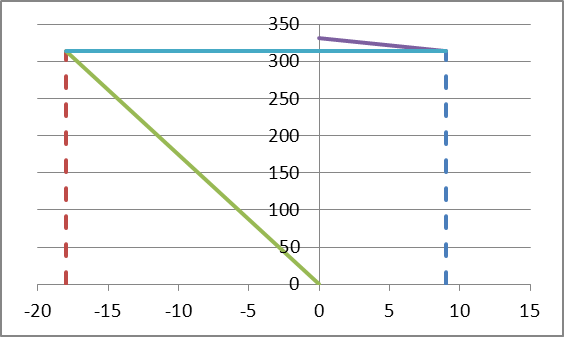 Рис. 4. Характеристика двигателя в режиме динамического торможения MathLab При регулировании угловой скорости введением резисторов в цепь якоря, двигателя постоянного тока, потери мощности в этой цепи изменяются пропорционально перепаду угловой скорости. Если момент нагрузки постоянен, постоянна потребляемая мощность и угловая скорость двигателя уменьшается вдвое, то примерно половина мощности потребляемой из сети, будет рассеиваться в виде теплоты, выделяемой из реостата, то есть данный способ регулирования является не экономичным. КПД привода при реостатном регулирование может быть определен по формуле: По номинальным данным строим механическую характеристику: Определяем моменты: а) пусковой ( б) Переключения пусковых ступеней ( Полученные характеристики представлены на рисунке 2.1 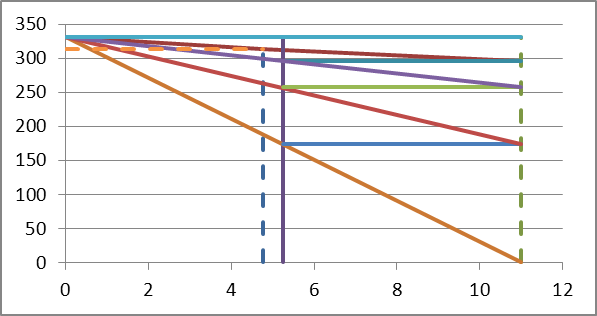 Рис.4.1 Технические характеристики двигателя MathLab Определяем пусковой резистор Определяем пусковой резистор Определяем пусковой резистор Запишем уравнение механической характеристики с учетом требуемых значений параметров: т.к.   Запишем уравнение скоростной характеристики с учетом требуемых значений параметров:  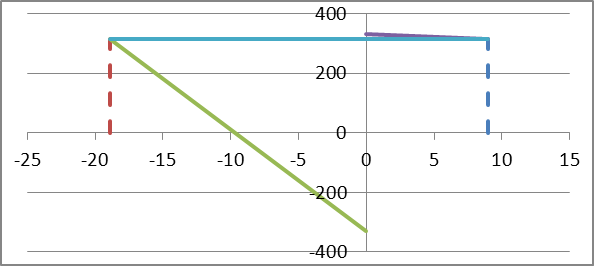 Рис. 4.2 Характеристика при смене питающего напряжения якоря, при токе в MathLab 5) Переходные характеристики: Рассчитать дополнительное сопротивление, ограничивающее в режиме динамического торможения пик тока до  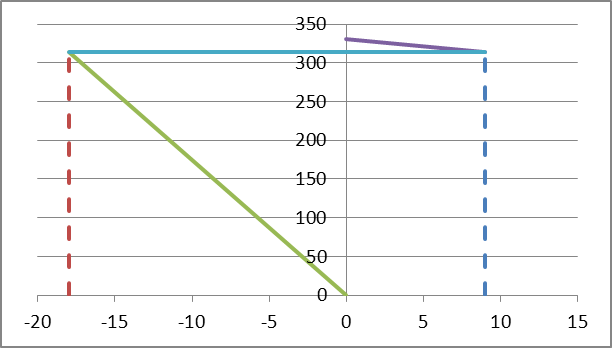 Рис. 5 Характеристика двигателя в режиме динамического торможения 6) Сравнительный анализ результатов: В заключение несколько слов о пусковых свойствах и областях применения двигателей постоянного тока. Подводя итоги по ДПТ последовательного возбуждения, можно заключить, что его механическая и электромеханическая характеристики не имеют аналитического выражения (поэтому приходится применять универсальные рабочие характеристики). Характеристики ДПТ ПВ нелинейны, с изменяющимся статическим коэффициентом жесткости. В режиме холостого хода он стремится к «разносу», поэтому ДТП ПВ не может быть рекомендован к установке в приводе механизмов, у которых по технологическим причинам или при обрыве кинематических цепей возможен режим холостого хода. Указанный двигатель обладает повышенными пусковыми свойствами, поскольку из-за нелинейности кривой намагничивания между током якоря и магнитным потоком существует зависимость Ф = 7^1.2—1.25. Кроме того, перегрузочная способность по току ДПТ ПВ превосходит ДПТ НВ на 25...40 %. С учетом обоих факторов пусковой момент ДПТ ПВ может превосходить в 1,5...2 раза пусковой момент ДПТ НВ с аналогичными Рн и ин. Благодаря повышенной площади поперечного сечения обмотки возбуждения, малым напряжениям между ее витками, отсутствию систем гашения поля ДПТ ПВ обладают повышенной надежностью. Двигатели находят широкое применение в электротяге. В ДПТ смешанного возбуждения магнитодвижущая сила (МДС) независимой обмотки возбуждения (создающей магнитный поток Ф,) превышает МДС последовательной обмотки (создающей магнитный поток Ф2) в 1,5...2,5 раза, в связи с этим характеристики ДПТ СВ занимают промежуточное положение по отношению к двигателям с независимой и последовательной обмотками возбуждения. Пусковые свойства ДПТ СВ также занимают промежуточные положения между ДПТ НВ и ДПТ ПВ. Двигатели смешанного возбуждения достаточно широко применяют в подъемно-транспортных и других установках, где возможны значительные кратковременные перегрузки привода и часты тормозные режимы. ДПТ НВ чаще всего используют в установках с регулируемыми приводами, требующих значительного диапазона регулирования угловой скорости двигателя. 6) Выводы: При регулировании угловой скорости введением резисторов в цепь якоря, двигателя постоянного тока, потери мощности в этой цепи изменяются пропорционально перепаду угловой скорости. Если момент нагрузки постоянен, постоянна потребляемая мощность и угловая скорость двигателя уменьшается вдвое, то примерно половина мощности потребляемой из сети, будет рассеиваться в виде теплоты, выделяемой из реостата, то есть данный способ регулирования является не экономичным. Челябинск, 2023 г. |