Реферат - Электромашинные усилители. Электромашинные усилители
 Скачать 488.5 Kb. Скачать 488.5 Kb.
|

|
Часть большого поперечного паза и малые пазы занимает распределенная компенсационная обмотка 2. Такое расположение компенсационной обмотки создаёт хорошие условия компенсации, так как обмотка якоря 3, поток которой уравнивает компенсационная обмотка, выполнена также распределенной. В этом случае компенсация потока продольной реакции якоря производится не только по амплитуде, но и по форме. В средних пазах, расположенных ни продольной оси машины, находятся сосредоточенная обмотка дополнительных полюсов 4 и поперечная обмотка подмагничивания 5. Нa спинке большого паза расположена обмотка размагничивания 6. Так как ЭМУ поперечного поля обладают достаточно большим остаточным напряжением за счет гистерезиса, то в ряде схем, особенно, когда усилитель используется в замкнутых системах автоматического регулирования, могут возникнуть автоколебания из-за наличия ложного сигнала, обусловленного остаточным напряжением. Для устранения этого явления в схемах обычно применяют размагничивание переменным током — этой цели и служит обмотка размагничивания 6. Такая конструкция статора и якоря является наиболее распространенной для ЭМУ мощностью до 20кВт. Электромашинные усилители приводятся во вращение приводными двигателями постоянного и переменного тока. При этом ЭМУ мощностью до 3 кВт выполняют в одном корпусе. На рис, 1.8, а показан внешний вид электромашинного усилителя поперечного поля типа У ДМ-150 с исполнительным двигателем постоянного тока, выполненного в одном корпусе. На рис. 1.8, б представлены детали этого усилителя. Важнейшей статической характеристикой ЭМУ поперечного поля является коэффициент усиления по мощности. Высокий коэффициент усиления по мощности получается за счет того, что ЭМУ Поперечного поля является двухступенчатым усилителем. Первая ступень усиления: обмотка управления — короткозамкнутая цепь поперечных щеток. Вторая ступень: короткозамкнутая цепь поперечных щеток — выходная цепь продольных щеток. Поэтому общий Коэффициент усиления по мощности kp = kp1kp2 (1.37) где kp1—коэффициент усиления 1-й ступени; kp2— коэффициент усиления 2-й ступени; Причем  (1.38) П  (1.39) R1- сопротивление обмотки управления. Коэффициенты усиления по мощности каждой ступени машины аналогично уравнению (1..3) могут быть записаны через основные параметры машины и нагрузки. Для первой ступени для второи ступени с Λq, Λd — соответственно магнитные проводимости по поперечной и продольной осям машины; R2, R3 — соответственно активные сопротивления поперечной и продольной цепей ЭМУ. Тогда общий коэффициент усиления по мощности ЭМУ (1.40) где T1 = L1/R 1 - постоянная времени обмотки управления; T2 = L2/R2 постоянная времени поперечной цепи. (Следовательно, общий коэффициент усиления по мощности ЭМУ поперечного поля пропорционален четвертой степени скорости вращения якоря, магнитным проводимостям по поперечной и продольной осям и зависит от соотношения сопротивлений обмоток машины и нагрузки. Отсюда следует, что усилитель будет иметь тем больший коэффициент усиления по мощности, чем меньше будет насыщена его магнитная цепь и чем выше будет скорость его вращения. Чрезмерно увеличивать скорость вращения нельзя, так как начинает сильно возрастать действие коммутационных токов. Поэтому при чрезмерном увеличении скорости за счет повышения коммутационных токов коэффициент усиления по мощности расти не будет, а может даже снижаться. Основными характеристиками электромашинного усилителя перечного поля являются внешние характеристики, т. е. зависимости: I2 = f1 (I3); (1.4I) U3 = f2 (I3). (1.42) Эти характеристики построены при условии постоянной скорости вращения приводного двигателя ω=const и номинальном сигнале на обмотке управления U1 =U1H = const. Кроме этого, м. д. с, действующей по продольной оси от сдвига щеток, пренебрегаем. 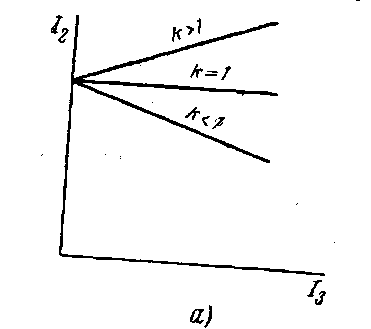 На рис. 1.9, а представлена зависимость тока в поперечной цепи I2 от тока в продольной цепи I3, т. е. от выходного тока, про текающего через нагрузку. Характеристики построены для всех трех случаев компенсации: полной компенсации (k=1), перекомпенсации (k>1) и недокомпенсации (k<1). На рис. 1.9, а представлена зависимость тока в поперечной цепи I2 от тока в продольной цепи I3, т. е. от выходного тока, про текающего через нагрузку. Характеристики построены для всех трех случаев компенсации: полной компенсации (k=1), перекомпенсации (k>1) и недокомпенсации (k<1).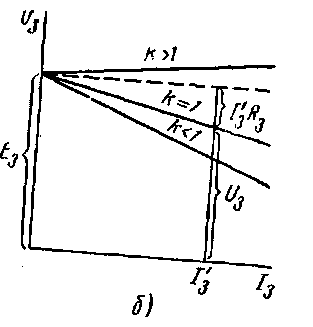 При полной компенсации (k=l) с учетом уже отмеченных допущений по продольной оси машины действует только м. д. с. обмотки управления. Следовательно, снимаемая поперечными щетками (см. рис. 1.6, а) э. д. с. E2=const, а значит, и ток I2 при изменении сопротивления нагрузки Rнarp во всем диапазоне остаются неизменными. Рис. 1.9. Внешние характеристики ЭМУ поперечного поля При перекомпенсации (k>l) по продольной оси, кроме м. д. с, ; создаваемой обмоткой управления, действует еще часть м. д. с. компенсационной обмотки, которая направлена согласно с м. д. с. обмотки управления, поэтому величина тока I2 с ростом тока нагрузки I3 растет. При недокомпенсации (k<1) по продольной оси действует часть м. д. с. продольной реакции якоря, нескомпенсированной м. д. с. Компенсационной обмотки, и поэтому ток I2 с ростом тока нагрузки I3 падает. Пользуясь этими зависимостями, усилитель можно легко настроить на неюбходимую степень компенсации. Если установитьдвижок шунтирующего сопротивления Rш (см. рис. 1.6, а) в такое положение, при котором с изменением нагрузки ток в поперечной цепи I2 не изменяется, это означает, что усилитель скомпенсирован (к=1). На рис. 1.9, б представлены внешние характеристики, построенные по уравнению (1.42). Здесь с учетом тех же допущений показана зависимость напряжения на нагрузке U3 от тока нагрузки I3. Также как и в предыдущем случае, характеристики даны для трех случаевкомпенсации. При полной компенсации напряжение на нагрузке при токе I3 U3=E3 - I3R3, (1.43) Где Е3— э. д. с. при I3=0, т. е. э. д. с. холостого хода; R3 — внутреннее сопротивление ЭМУ по продольной оси. В этом случае напряжение на усилителе при полной компенсации (к=1)с ростом тока I3 падает и отличается от э. д. с. E3 на величину падения напряжения на внутреннем сопротивлении ЭМУ. При перекомпенсации (к> 1) напряжение на нагрузке может быть неизменным с ростом тока нагрузки I3 или даже возрастать. При недокомпенсации (к<1) напряжение на нагрузке с ростом тока I3 падает. При использовании электромашинных усилителей в замкнутых системах автоматического регулирования (стабилизаторы, регуляторы, следящие системы) машина должна быть несколько недокомпенсирована (к=0,97÷0,99), так как в случае перекомпенсации в системе во время работы возникнет ложное возмущение за счет остатка м. д. с. компенсационной обмотки, которое приведет к возникновению автоколебаний системы. 1.5. Динамические характеристики электромашинного усилителя поперечного поля Динамические свойства ЭМУ поперечного поля оценивают по характеру протекания переходного процесса, т.е. по нарастанию напряжения в продольной цепи U3 во времени U3=f(t) при подаче на вход (обмотку управления) напряжения управления. Быстродействие ЭМУ в общем случае определяется постоянными времени: 1) обмотки управления Т1=L1/R1 где L1— индуктивность обмотки управления; R1—активное сопротивление обмотки управления; 2) поперечной цепи T2=L2/R2 где L2— индуктивность обмотки якоря; R2— активное сопротивление якоря; 3) продольной цепи, которую необходимо учитывать при работе на нагрузку, Однако, если учесть, что в реальных случаях Rнагр≥R3 ,то Т3 значительно меньше первых двух и ею можно пренебречь. Кроме того, на ход переходного процесса влияет взаимодействие обмотки управления и поперечной цепи, обусловленное реакцией коммутационных токов поперечной цепи. Перемещение щеток по направлению вращения или против него также вызывает взаимосвязь обмотки управления с поперечной цепью и изменение характера переходного процесса. На быстродействии усилителя сказывается взаимосвязь обмоток, расположенных на статоре, с обмоткой якоря и между собой, т. е. взаимоиндуктивность обмоток управления с компенсационной обмоткой, обмоткой дополнительных полюсов, поперечной подмагничивающей обмоткой, компенсационной обмотки с витками поперечной цепи якоря и т. д. Решение уравнений переходного процесса с учетом всех взаимосвязей достаточно громоздко, а их влияние на переходный процесс во многих случаях относительно невелико. Рассмотрим процесс нарастания э. д. с. в выходной цепи е3 в функции времени с учетом главных связей в ЭМУ [30]. Допустим что:
Нарастание выходной э. д. с. е3 во времени, когда щетки расположены на нейтрали, можно найти из четырех уравнений равновесия э. д. с.
(1.41) где М1к— взаимоиндуктивность между обмоткой управления и компенсационной обмоткой; iк— ток компенсационной обмотки. 2) Для компенсационного контура где Rк, Lk— соответственно активное сопротивление и индуктивность компенсационного контура; Mki— взаимоиндуктивность между компенсационной обмоткой и обмоткой управления. 3) Для поперечной цепи где R2, L2 — соответственно активное сопротивление поперечной цепи и индуктивность обмотки якоря; i2— ток в поперечной цепи; a1 и ак— коэффициенты пропорциональности. 4) Для продольной цепи е3 = a2ί2, (1.47) где е3— э. д. с в продольной цепи; а2— коэффициент пропорциональности. На рис. 1.10 представлена схема электромагнитных связей в ЭМУ во время переходного процесса для рассматриваемого случая. Е 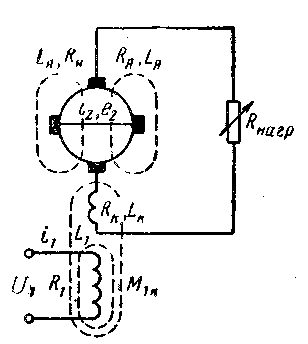 сли принять взаимоиндуктивность между обмоткой управления и компенсационной равной единице, то уравнения (1.44) — (1.47) можно свести к операторному уравнению второго порядка: сли принять взаимоиндуктивность между обмоткой управления и компенсационной равной единице, то уравнения (1.44) — (1.47) можно свести к операторному уравнению второго порядка:где ku - коэффициент усиления по напряжению; Тк - постоянная времени компенсационного контура. Решение уравнения (1.48) показывает изменение выходной э. д. с. е3 во времени при ступенчатом приложении сигнала на вход усилителя Рис. 1.10. Схема электромагнитных (1.49) связей в ЭМУ У (1.50) Для ориентировочных расчетов можно пользоваться упрощен», ным уравнением переходного процесса. Так как в усилителе Т2>Т1+ТК , то с учетом этого упрощенное уравнение переходного процесса будет (1.51) Из выражения (1.50) и (1.51) видно, что в первом случае ЭМУ представляет собой два последовательных апериодических звена, а во втором — одно. Н 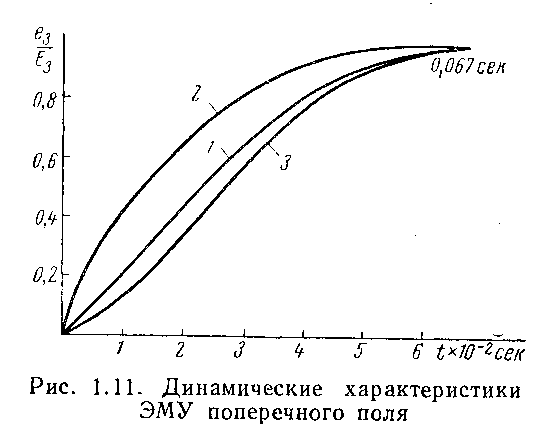 а рис. 1.11 представлены динамические характеристики ЭМУ поперечного поля [30]. а рис. 1.11 представлены динамические характеристики ЭМУ поперечного поля [30].Кривая 1 построена по уравнению (1.50), а кривая 2 по уравнению (1.51), для сравнения приведена экспериментальная кривая 3. Отличие расчетных кривых от экспериментальной объясняется тем, что в начале процесса сказывается влияние нелинейного сопротивления поперечной цепи, обусловленного наличием переходного контакта щетка — коллектор, а в конце более быстрое нарастание переходного процесса, обусловленное наличием взаимоиндуктивности между поперечной и продольной цепями. Передаточную функцию ЭМУ поперечного поля находят на осн овании уравнения (1.48): 1.6. ПРИМЕНЕНИЕ ЭЛЕКТРОМАШИННЫХ УСИЛИТЕЛЕЙ Электромашинные усилители выпускаются серийно и нашли широкое применение в системах автоматического регулирования и автоматизированного электропривода. В системах генератор — двигатель генератор, а часто еще и возбудитель, по существу представ-,1IVIiOT собой независимые электромашинные усилители, соединенные и каскад. Наибольшее распространение получили ЭМУ поперечного поля. Эти усилители обладают рядом достоинств, главными из которых являются: 1) большой коэффициент усиления по мощности (кр=103÷105);. 2) малая входная мощность, позволяющая питать обмотки уп- равления от электронных ламповых и полупроводниковых усилителей; 3) достаточное быстродействие, т. е. малые постоянные времени цепей усилителя. Время нарастания напряжения от нуля до номинального значения для промышленных усилителей мощностью 1-5кВтсоставляет 0,05—0,1 сек; 4) достаточные надежность, долговечность и широкие пределы изменения мощности; 5) возможность изменения характеристик за счет изменения степени компенсации, позволяющая получать необходимые внешние характеристики. К числу недостатков электромашинных усилителей следует отнести: 1) относительно большие габариты и вес по сравнению с генераторами постоянного тока той же мощности, так как для получения больших коэффициентов усиления применяется ненасыщенная магнитная цепь; 2) наличие остаточного напряжения за счет гистерезиса. Э. д. с, наводимая в якоре потоком остаточного магнетизма, искажает линейную зависимость выходного напряжения от входного сигнала в зоне малых сигналов и нарушает однозначность зависимости выходных параметров ЭМУ от входных при изменении полярности входного сигнала, ибо поток остаточного магнетизма при постоянной полярности сигнала будет увеличивать поток управления, а при изменении полярности сигнала — уменьшать поток управления. Кроме того, под действием остаточной э. д. с ЭМУ, работающий в режиме перекомпенсации, при малом сопротивлении нагрузки н нулевом входном сигнале может самовозбуждаться и терять управляемость. Это явление объясняется неуправляемым увеличением продольного магнитного потока машины, первоначально равного потоку остаточного магнетизма, за счет подмагничивающего действия компенсационной обмотки. Д 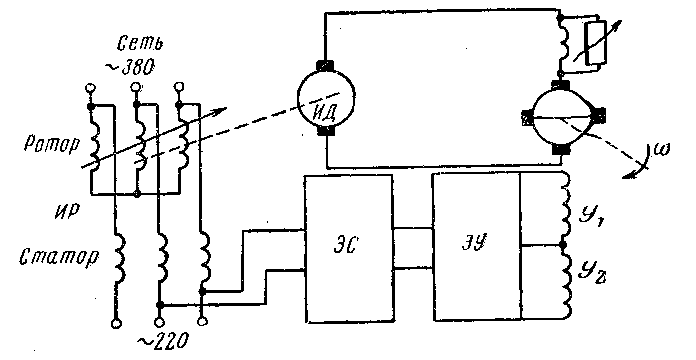 ля нейтрализации вредного действия потока остаточного магнетизма в ЭМУ осуществляют размагничивание переменным током, а сами ЭМУ ставят в автоматические системы несколько недокомпенсированными. ля нейтрализации вредного действия потока остаточного магнетизма в ЭМУ осуществляют размагничивание переменным током, а сами ЭМУ ставят в автоматические системы несколько недокомпенсированными.Следует отметить, что с внедрением магнитных усилителей применение ЭМУ в системе генератор — двигатель значительно сокращается. Однако ЭМУ находят все большее применение в системах ЭМУ — двигатель, где электромашинный усилитель используется в качестве генератора, питающего двигатель. В последние годы в результате использования промежуточных полупроводниковых усилителей значительно увеличились диапазоны регулирования и быстродействие электроприводов, работающих на системах ЭМУ—двигатель. Рис. 1.12. Схема автоматического регулирования синусоидального напряжения Такие электроприводы применяются в различных областях, в связи с этим растет производство ЭМУ поперечного поля. Электроприводы с использованием ЭМУ мощностью до 10кВт получили в настоящее время преимущественное распространение по сравнению с другими типами приводов в станках и установках радиоэлектронной промышленности. Рассмотрим несколько примеров использования электромашинных усилителей в схемах автоматики. На рис. 1.12 приведена схема бесконтактной системы автоматического регулирования амплитуды си ну со ид а ль но го напряжения. Эта схема применяется на радиозаводах на участках настройки телевизоров и радиоприемников, где напряжение должно быть стабилизировано по амплитуде и синусоидально изменяться по времени. Применение феррорезонансных стабилизаторов для этих целей недопустимо, так как, поддерживая с достаточной точностью амплитуду, феррорезонансные стабилизаторы сильно искажают синусоиду. Поэтому в таких случаях применяют системы автоматической стабилизации напряжения с использованием в качестве регулирующего органа индукционный регулятор. В схеме рис. 1.12 нестабильное трехфазное напряжение подается на ротор индукционного регулятора ИР. Выходное стабилизируемое напряжение снимается с зажимов статора, подается на приемники и одновременно на вход элемента сравнения, где сравнивается с опорным эталонным напряжением. Сигнал рассогласования усиливается электронным усилителем ЭУ и поступает на одну из обмоток управления электромашинного усилителя — У1 или У2. В зависимости от полярности сигнала рассогласования на выходе ЭМУ появляются напряжения прямой или обратной полярности и исполнительный двигатель ИД, вращаясь, перемещает ротор индукционного регулятора в сторону уменьшения или увеличения напряжения. Н |