Удаленная лекция ЭП 1. Электромеханические свойства двигателей постоянного тока
 Скачать 0.68 Mb. Скачать 0.68 Mb.
|

|
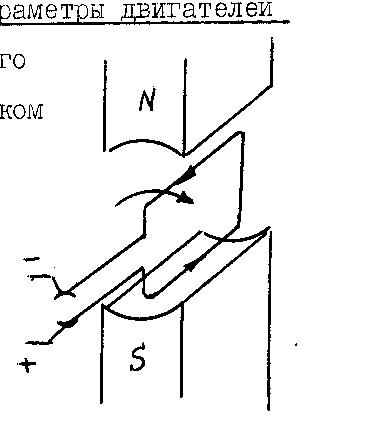
ГЛАВА 2. ЭЛЕКТРОМЕХАНИЧЕСКИЕ СВОЙСТВА ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА 2.1. Принцип действия, устройство и параметры двигателей постоянного тока Принцип действия двигателей постоянного тока основан на свойствах проводников с током в магнитном поле. Если в поле постоянного магнита поместить рамку, по проводникам которой пропустить электрический ток (рис. 2.1), то взаимодействие тока и магнитного потока вызовет появление вращающего момента . Направление вращения определяется «правилом левой руки».
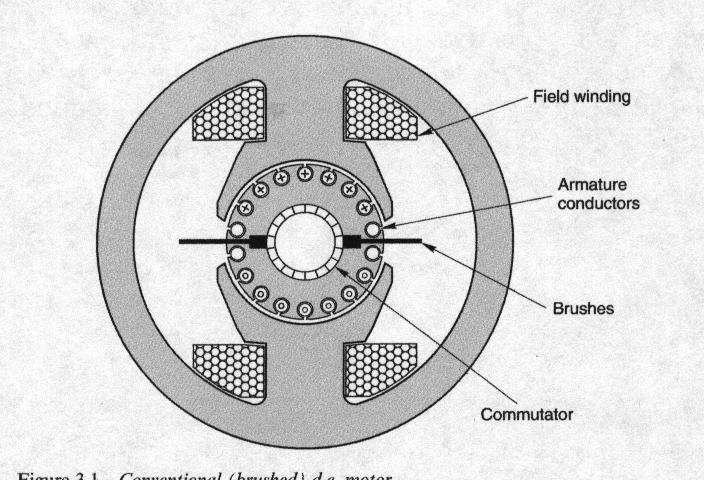
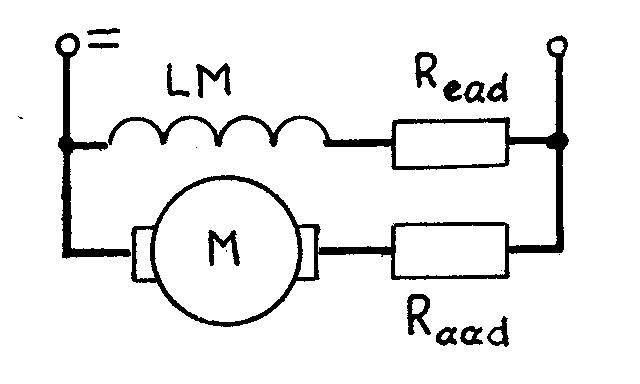
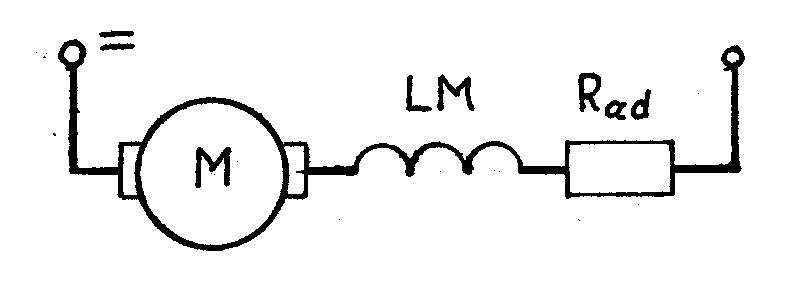
Двигатель постоянного тока построен на использовании этого явления. Большое число «рамок», уложенных в пазах якоря (рис. 2.2), набранного из штампованных стальных дисков, образует якорную обмотку. Роль постоянного магнита выполняет статор, на полюсах которого намотана обмотка возбуждения. Возбуждением называется процесс создания магнитного поля. По схеме включения обмоток возбуждения различают двигатели независимого (шунтовой двигатель), последовательного (сериесный двигатель) и смешанного (компаундный двигатель) возбуждения. Схемы включения обмоток приведены на рис. 2.4. В общем случае в цепях обмоток могут быть включены добавочные сопротивления.
Рис. 2.4. Схемы включения двигателей постоянного тока: а – с независимым возбуждением; б – с последовательным возбуждением На металлической табличке, прикрепленной к каждому двигателю, указано: завод-изготовитель, тип машины и способ возбуждения (П, ПН, ДП, МП и др.), номинальные данные : PN, UN, IN , nN , иногда ηN , G, J, год изготовления, заводской номер. В каталогах и справочниках можно найти: максимальный момент или перегрузочную способность, габариты машины, все установочные размеры, ток возбуждения, обмоточные данные. Наиболее часто бывают нужны ток возбуждения, перегрузочная способность, сопротивление обмотки якоря. Эти величины можно определить и без каталога с достаточной точностью. У шунтовых двигателей iвN = 2  3%IN . У сериесных эти токи равны, но при работе ток возбуждения меняется. Сопротивление якорной обмотки rа можно найти из условия, что в номинальном режиме половина потерь в двигателе приходится на якорь, откуда 3%IN . У сериесных эти токи равны, но при работе ток возбуждения меняется. Сопротивление якорной обмотки rа можно найти из условия, что в номинальном режиме половина потерь в двигателе приходится на якорь, откуда rа =  = 0,5 = 0,5  Перегрузочная способность у шунтовых двигателей по току и моменту одинакова и составляет λM = Ммакс / МN = λI = Iмакс / IN = 2 2,5, у сериесных λм =2,5 3, аλI = 2 2,5.2.2. Механическая и электромеханическая характеристики двигателей постоянного тока Уравнение электромеханической и механической характеристик двигателей постоянного тока наиболее удобно получить для шунтового двигателя. Уравнения характеристик выводятся из баланса напряжений цепи якоря: U = E + IаRа , где U напряжение питания якорной обмотки; Е  электродвижущая сила (ЭДС) якоря, Iа ток якоря, Rа сопротивление якорной цепи, равное сумме сопротивления якоря и добавочного сопротивления: электродвижущая сила (ЭДС) якоря, Iа ток якоря, Rа сопротивление якорной цепи, равное сумме сопротивления якоря и добавочного сопротивления: Rа = rа +Rа доб. ЭДС Е индуктируется в обмотке якоря при его вращении и может быть определена по формуле: Е =  Φ ω = Φ ω =  Φ n = keΦn , Φ n = keΦn ,
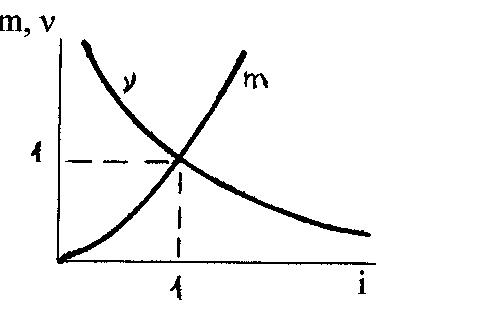
выражение для ЭДС в уравнение балансанса напряжений, получим: U = keФn + IаRа , откуда n =  . .Это уравнение электромеханической характеристики n = f(I). Для получения уравнения механической характеристики n = f(М) воспользуемся выражением момента через ток и магнитный поток: М = kмΦIa , где kм = конструктивная постоянная машины по моменту.Подставив это выражение в уравнение для электромеханической характеристики, получим: n =  . .Из уравнения видно, что характеристики шунтового двигателя представляют собой линейную зависимость. Обычно sN = 3 10%,. Мкз / МN= Iкз / IN = 10 15 (рис. 2.5)Для двигателя с последовательным возбуждением эти уравнения также справедливы, однако в отличие от шунтового магнитный поток не постоянен, а зависит от тока якоря, а значит от нагрузки. По этой зависимости при малых нагрузках магнитный поток сначала пропорционален току якоря, а затем при больших нагрузках происходит насыщение и поток практически постоянен (рис. 2.6).
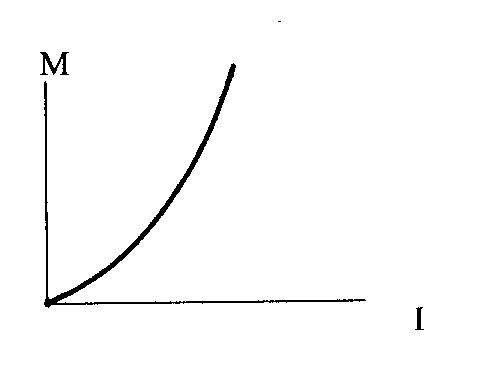
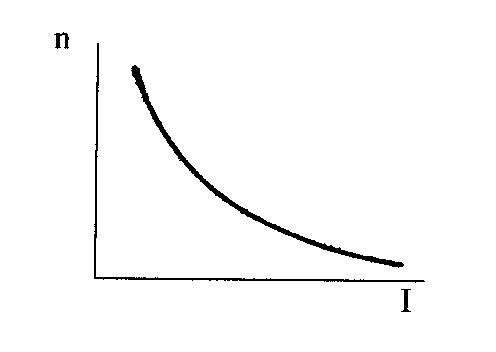
Рис. 2.6. Основные зависимости параметров двигателя с последовательным возбуждением: а – кривая намагничивания; б – зависимость момента от тока; в – зависимость скорости от тока Поэтому зависимость момента от тока сначала квадратичная, а затем линейная (рис. 2.7, б.). Вид механической и электромеханической характеристик близок к гиперболе (рис. 2.6, в), но пропорциональности масштабов при этом нет. Основными особенностями сериесного двигателя являются отсутствие режима холостого хода, несколько большая крутизна характеристики в зоне малых нагрузок, больший, чем у шунтового двигателя, момент при тех же токах в зоне больших нагрузок. Сериесный двигатель не может работать без нагрузки, т.к. при этом его скорость возрастает и двигатель идет вразнос. 2.3. Построение характеристик двигателей постоянного тока Для шунтового двигателя рассчитываются две точки: номинальный режим и идеальный холостой ход. Для номинального режима: МN = 9550РN / nN ; keΦNnN= UN - IаNrа ; keΦN = (UN - IаNrа )/ nN. Зная keΦN, можно определить частоту вращения идеального холостого хода: n0 = UN / keΦN = nN UN /(UN - IаN rа ). Для любой искусственной характеристики расчет ведут аналогично, задавая соответствующие новые параметры или кратность магнитного потока.
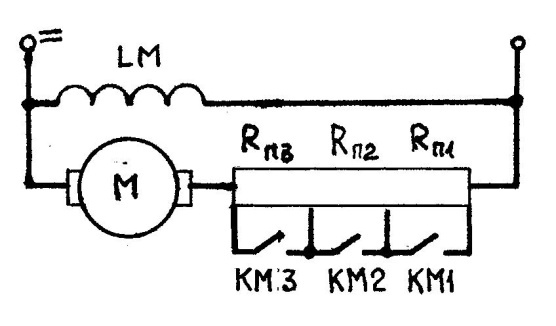
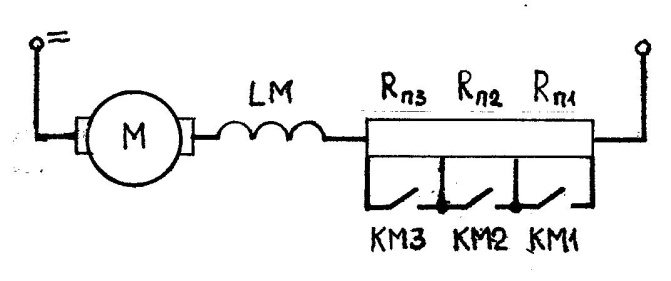
Задаваясь кратностью тока, по кривым определяются кратности скорости и момента. Искусственные характеристики строятся с использованием естественных характеристик для кон-кретных значений момента и тока и измененных параметров (напряжение или сопротивление якоря). 2.4. Пуск двигателя постоянного тока и расчет пускового реостата Всякий режим пуска начинается с режима короткого замыкания, т.е. с такого, при котором обмотка якоря включена в сеть, а якорь неподвижен. В этом случае ток цепи якоря определяется в соответствии с законом Ома: Iкз= U/ ra . Поскольку на естественной характеристике сопротивление якоря очень мало, Iкз= (10 15) IN. Отсюда можно сделать вывод, что при пуске двигателя необходимо либо снижать напряжение на обмотке якоря, либо увеличивать сопротивление цепи якоря. При питании от сети используют включение пускового сопротивления. Изменением напряжения пользуются только при наличии регулируемого источника питания.При пуске двигателя надо обеспечить два условия: 1. Пусковой момент двигателя должен быть больше момента статической нагрузки. При их равенстве разгон прекратится. 2. Максимальные значения тока и момента при пуске не должны превышать допустимых пределов. По условиям коммутации, т.е. по условиям работы щеточного контакта, допустимый ток составляет 2,5 IN. Однако, по условиям питающей сети или допустимых ускорений механизма допустимые ток и момент могут быть ограничены в большей степени. Для обеспечения плавного пуска с минимальным временем обычно делают пуск многоступенчатым (рис. 2.8). Число ступеней можно выбрать произвольно,
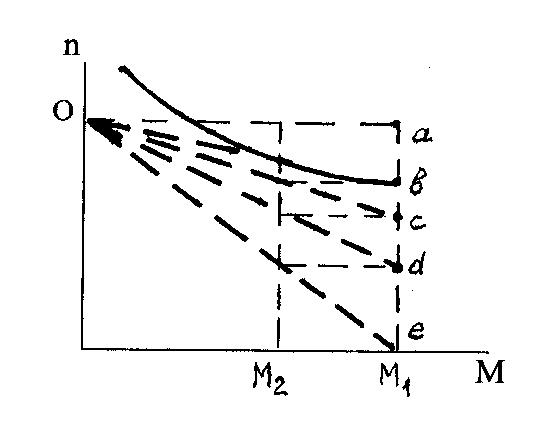
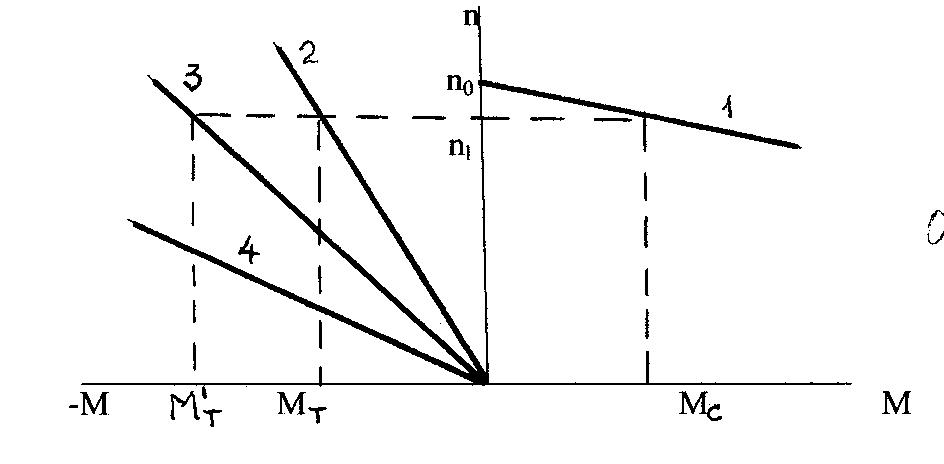
Рис. 2.8. Схемы пуска двигателей постоянного тока: а – с независимым возбуждением; б – с последовательным возбуждением но как правило не более пяти. Для обеспечения пуска задаются одним из значений пускового момента максимальным или минимальным: Мп мин = (1,2 1,5) Мс; Мп макс  Мдоп . Мдоп .Каждой ступени сопротивления соответствует своя характеристика. Для трехступенчатого пуска получаются показанные на рис. 2.9 диаграммы. Процесс пуска происходит так: при включении двигателя бросок момента до М1 = Ммакс. (рис. 2.9). Двигатель начинает разгон по первой характеристике (е – n0). При достижении момента М2 = Ммин (рис. 2.9) происходит переключение двигателя, при котором часть сопротивления шунтируется (то есть выводится из цепи якоря).
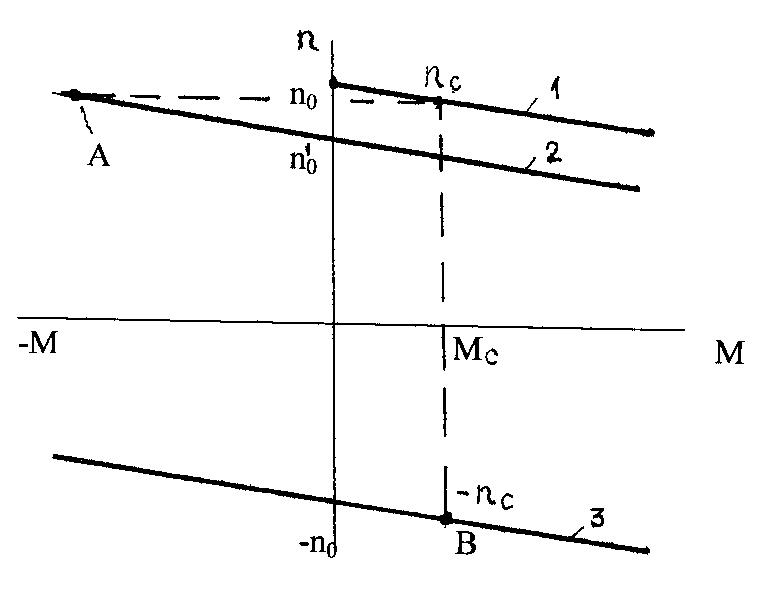
Рис. 2.9. Пусковые диаграммы двигателей постоянного тока: а – с независимым возбуждением; б – с последовательным возбуждением Момент снова скачком увеличивается до максимального и так до тех пор, пока двигатель не разгонится до рабочей скорости nс. Для того, чтобы при пуске момент не превышал допустимых пределов, необходимо сопротивления правильно рассчитать. Для шунтового двигателя по паспортным данным рассчитывают пусковую диаграмму так. Строят естественную механическую характеристику. Задаются значениями Ммакс и Ммин и числом ступеней. Строят всю пусковую диаграмму (рис.2.9, а). Если подбор сделан правильно, то на всех характеристиках максимальный и минимальный моменты получатся одинаковыми. По правильной пусковой диаграмме отрезки ab, bc, cd и de пропорциональны сопротивлениям якорной цепи. Масштаб сопротивлений определяют по отрезку ae, который пропорционален полному сопротивлению цепи якоря. Для расчета сопротивлений для сериесного двигателя существует несколько методов. Наиболее простой метод лучевой диаграммы (рис. 2.9, б). При этом линеаризуется участок естественной характеристики между моментами Ммакс и Ммин. Линия продолжается до пересечения с осью скорости.Далее построение идет так, как было показано для шунтового двигателя.2.5. Тормозные режимы двигателей постоянного тока Электродвигатели отличаются той особенностью, что для их остановки не требуется применение специальных тормозных устройств. Торможение используется при необходимости ограничения скорости движения привода, находящегося под действием потенциальных (активных) сил и моментов, а также при необходимости снижения скорости привода вплоть до полной остановки. При этом могут применяться три тормозных режима. Рекуперативное торможение возникает в тех случаях, когда скорость двигателя становится выше скорости идеального холостого хода (рис. 2.10). Очевидно, что такой режим возможен только у шунтовых двигателей. Поскольку в этом режиме скорость двигателя становится выше скорости идеального холостого хода, ЭДС двигателя превышает напряжение питания: Е = keΦn  U = keΦn0 , т. к. n n0 . U = keΦn0 , т. к. n n0 .Следовательно, ток якоря должен изменить направление: U = Е + ( IaRa ), Ia 0 .Двигатель стал генератором, работающим параллельно с сетью. Причем, торможение возникает только за счет переключения двигателя на другую характеристику. Режим может проявляться как установившийся и как переходный. При переключении двигателя с одного напряжения на другое или с одного тока возбуждения на другой (характеристики 1 и 2, рис. 2.10) меняется скорость холостого хода. От nс до  режим генераторного торможения. При силовом спуске легкого груза или при движении транспорта под уклон под действием момента двигателя и нагрузки привод разгоняется до скорости режим генераторного торможения. При силовом спуске легкого груза или при движении транспорта под уклон под действием момента двигателя и нагрузки привод разгоняется до скорости  , точка В на характеристике 3, при которой будет установившийся режим торможения. , точка В на характеристике 3, при которой будет установившийся режим торможения.
когда двигатель включен для работы в одном направлении, а его якорь вра-щается в обратном под действием внешних сил или моментов. Этот режим также может возникать в двух случаях. У вращающегося двигателя изменили полярность напряжения питания якорной обмотки (рис. 2.11).
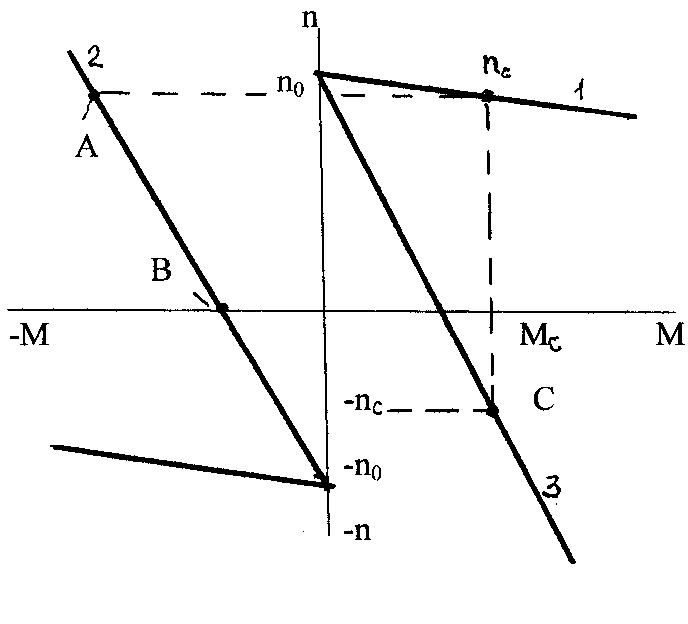
Рис. 2.11. Схемы включения обмоток (а) и механические характеристики (б) двигателя с независимым возбуждением при торможении противовключением В этом случае направление поля двигателя не изменилось. В первый момент направление скорости тоже остается прежним, т.к. двигатель и механизм обладают инерцией. Поэтому при изменении полярности напряжения ток якоря должен изменить направление, следовательно, изменится и направление момента (точка А, рис. 2.9, б). Очевидно, что в первый момент времени ток будет очень велик: Iнач = (U + E) / ra  2 Iкз . 2 Iкз .Поэтому при противовключении необходимо вводить большое добавочное сопротивление в цепь якоря. Достоинством этого режима является возможность полной остановки двигателя и достаточно большой средний тормозной момент.
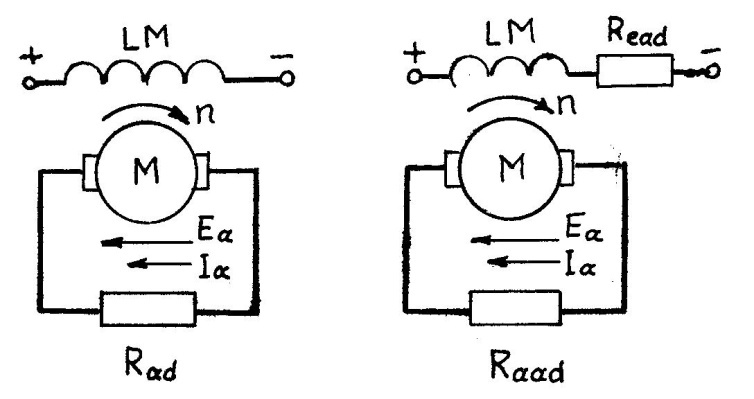
возможен реверс двигателя. Этот способ обычно применяется в реверсивных механизмах. При тормозном спуске груза в цепь якоря включают большое добавочное сопротивление. При этом момент короткого замыкания двигателя в пределах первого квадранта меньше момента нагрузки, поэтому привод раскручивается в обратную сторону и двигатель работает в тормозном режиме (точка С, рис. 2.11, б). В отличие от предыдущего случая здесь получается устойчивый режим работы. В потери обращается энергия, поступающая из сети и с вала двигателя. Торможение противовключением у двигателя с последовательным возбуждением проходит аналогично, характеристики представлены на рис. 2.12. Динамическое торможение может быть с самовозбуждением и с независимым возбуждением. Первый случай используется как аварийное торможение и мы его рассматривать не будем. При торможении с независимым возбуждением якорная обмотка двигателя отключается от питающей сети и замыкается на тормозное сопротивление. Обмотка возбуждения подключена к сети и по ней протекает номинальный ток, для чего у сериесного двигателя включается добавочное сопротивление (рис. 2.13).
Рис. 2.13. Схемы включения обмоток двигателей (а, б) и характеристики (в) двигателей постоянного тока при динамическом торможении Процесс торможения и характеристики у обоих двигателей одинаковы. Двигатель стал генератором, работающим на постоянное сопротивление. Поскольку в якорной обмотке действует только ЭДС, ток меняет направление. Величина тока, а следовательно и момента, зависят от величины тормозного сопротивления: чем оно меньше, тем момент и ток больше (характеристики 2 и 3, рис. 2.13, в). Торможение приводит к полной остановке. Различие режима для разных двигателей состоит в разной энергетике: для шунтового двигателя потребление из сети равно Рв = iвNUв = (2-3 %) INUв = (2-3 %) РN, для сериесного Рв = INUв = РN . Энергия, поступившая с вала, обращается в потери. По сравнению с противовключением эффективность торможения меньше, поэтому целесообразно применять ступенчатое выключение сопротивлений в якорной цепи по мере снижения скорости. Контрольные вопросы Почему характеристики двигателей с параллельным возбуждение прямолинейны, а с последовательным возбуждением нелинейны ? Как ограничивается величина пускового тока ? Перечислите способы торможения двигателей постоянного тока и дайте им краткую оценку. | |||||||||||||||||||||||||