08 Глава 6_. Элементы теории движения пожарного автомобиля
 Скачать 1.04 Mb. Скачать 1.04 Mb.
|

|
6.1.9. Динамическая характеристика пожарного автомобиля Методы силового и мощностного баланса имеют общий недостаток – при использовании этих методов трудно сравнивать тягово-скоростные свойства АТС с различными массами, так как при движении в одинаковых условиях силы и мощности, необходимые для преодоления сопротивления дороги, различны. От этого недостатка свободен метод динамической характеристики, предложенный Е. А. Чудаковым. Динамическим фактором D АТС называется отношение D = (Pк-Pв)/Gg. (6.43) Если в правую часть уравнения (6.43) подставить значения Pк и Pв (6.4) и (6.21), то после преобразований получим формулу для вычисления динамического фактора: который могут обеспечить двигатель и трансмиссия на ведущих колесах АТС. Если подставить значение Pк (6.37), то получим формулу для вычисления динамического фактора: который необходимо обеспечить для движения в заданных условиях. Чтобы учесть ограничение реализуемых Pк силами сцепления ведущих колес с дорогой, необходимо использовать предельное значение силы тяги по формуле (6.10). Автомобиль из-за ограниченной силы сцепления Pφ колес с дорогой не может реализовать динамический фактор, больший Длительное движение АТС в заданных дорожных условиях (ψ или α, f) со скоростью v и ускорением j возможно, если выполняется условие При равномерном движении (f = 0) полноприводного ПА с малой скоростью (Pв= 0) условие (6.48) с учетом формул (6.40) и (6.46) записывается в виде При равномерном движении (j = 0) двухосных и трехосных ПА по горизонтальной дороге (α= 0) с малой скоростью (Pв= 0) условие (6.48) с учетом формул (6.36), (6.39) и (6.46) записывается в виде (G34/G) Динамической характеристикой автомобиля D(v) называют зависимость динамического фактора D(6.45) от скорости движения на различных передачах. Для построения динамической характеристики необходимо: 1. На внешней характеристике двигателя Мe (см. рис. 5.9) выбрать несколько значений nдi и соответствующих им Мei. По формуле (6.2) определить Мдi. 2. По формуле (6.40) определить vi, которые соответствуют nдi на первой передаче. 3. По формуле (6.45) определить Di, соответствующие vi на первой передаче. Повторить расчеты с п. 2 для каждой последующей передачи. По динамической характеристике D(v) определяются vmax , max и vmin. Для определения vmax на участке дороги с коэффициентом сопротивления качению f и уклоном необходимо по оси ординат динамической характеристики D(v) отложить коэффициент (см. формулу (6.38)), масштаб D и должен быть одинаков) и провести прямую, параллельную оси абсцисс. Возможны несколько случаев. 1. Если линия (прямая 1 на рис. 6.7, а) пересекает динамическую характеристику в одной точке, то vmax= v1, так как при превышении этой скорости не выполняется условие (6.48). В зависимости от это пересечение может быть на любой передаче. 2. Если линия (прямая 2 на рис. 6.7, а или 3 на рис. 6.7, б) не пересекает динамическую характеристику, то равномерное движение ПА при полностью открытой дроссельной заслонке карбюраторного двигателя или при максимальной подаче топлива дизельного двигателя невозможно, так как D > D и начинается разгон ПА. Чтобы обеспечить равномерное движение, водитель должен прикрыть дроссельную заслонку карбюраторного двигателя или уменьшить подачу топлива дизельного двигателя. Максимальная скорость ПА будет ограничена максимально допустимой угловой скоростью коленчатого вала двигателя. Например, vmax= v2 при движении на пятой передаче и vmax= v3 при движении на второй передаче. 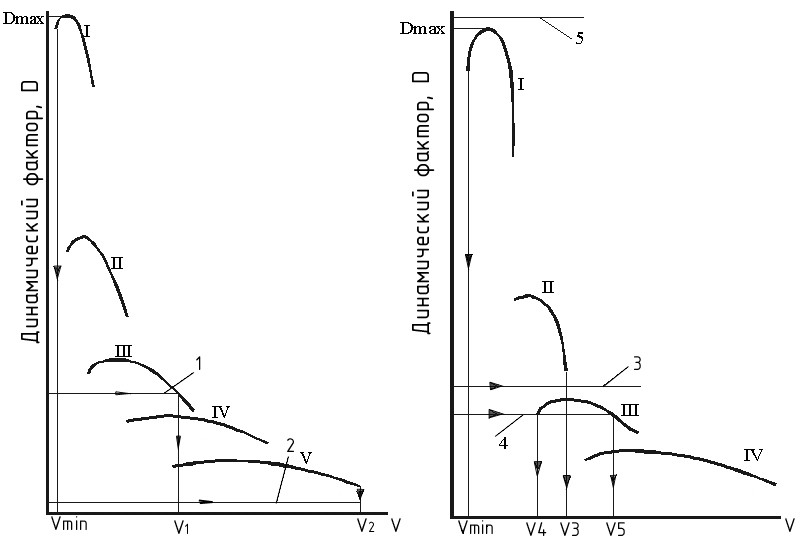 Dmax Dmax 5  1 3 4 2 vmin v1 v2 v vmin v v4 v3 v5 а б Рис. 6.7.Динамическая характеристика пожарного автомобиля: а – на шасси АТС с 5-ступенчатой коробкой перемены передач; б – на шасси с 4-ступенчатой коробкой перемены передач; I -V – передачи 3. Если линия (прямая на рис. 6.7) пересекает динамическую характеристику в двух точках, то ПА может равномерно двигаться как со скоростью v4, так и со скоростью v5. 4. Если линия (прямая 5 на рис. 6.7, б) выше динамической характеристики, то не выполняется условие (6.48), и равномерное движение ПА при таком коэффициенте Для определения max необходимо по динамической характеристике найти максимальное сопротивление дороги D=Dmax, которое может преодолеть ПА на первой передаче (рис. 6.7), и затем по формуле (6.46) вычислить max при известном коэффициенте f и j=0. Приближенно можно считать, используя формулы (6.16) и (6.38), что tgmax = imax= Dmax- f. (6.50) Скорость vmin определяется, как правило, только для низшей (первой) передачи (см. рис. 6.7). Для определения vmin ПА при движении по поверхности с твердым покрытием необходимо знать частичные характеристики двигателя и учитывать использование части крутящего момента двигателя Mд на привод пожарного оборудования, например насоса. 6.1.10. Разгон пожарного автомобиля Время равномерного движения ПА невелико по сравнению с общим временем следования к месту вызова. При эксплуатации в городах ПА движутся равномерно не более 10 – 15 % времени. Более 40 – 50 % времени ПА движутся ускоренно. Способность АТС изменять (увеличивать) скорость движения называют приемистостью. Одним из наиболее распространенных показателей, характеризующих приемистость автомобиля, является время tv разгона автомобиля с места до заданной скорости v. Определяют tv обычно экспериментально на горизонтальной ровной дороге с асфальтобетонным покрытием при коэффициенте = 0,015 (f= 0,01, i% 0,5). Аналитические методы определения tv основаны на построении зависимости t(v) (рис. 6.8), т.е. на интегрировании дифференциального уравнения (6.1):  (6.51) (6.51)При 0 < v < vmin движение ПА происходит при пробуксовке сцепления. Время разгона tp до vmin зависит в основном от умения водителя правильно выбрать положение педалей сцепления и топлива (см. п. 6.1.1). Так как время разгона tp существенно зависит от квалификации водителя, которую трудно описать математически, то при аналитическом определении tv время tp часто не учитывают. Разгон ПА на участке АВ происходит на первой передаче при полностью нажатой педали топлива. При максимальной скорости ПА на первой передаче (точка В) водитель выключает сцепление, разобщая двигатель и трансмиссию, и автомобиль начинает двигаться замедленно (участок ВС). Включив вторую передачу, водитель вновь нажимает до отказа педаль подачи топлива. Процесс повторяется при переходах на последующие передачи (участки CD, DE). Время переключения передач t12,t23 (рис 6.8) зависит от квалификации водителя, способа переключения передач, конструкции коробки передач и типа двигателя. Среднее время переключения передач водителями высокой квалификации приведено в табл. 6.3. У автомобиля с дизельным двигателем время переключения передач больше, так как из-за больших (по сравнению с карбюраторным двигателем) инерционных масс его деталей частота вращения коленчатого вала изменяется медленнее, чем у карбюраторного двигателя.  Рис.6.8. Разгон пожарного автомобиля: t12, t23– соответственно время переключения передачи с первой на вторую и со второй на третью; ∆v12 и ∆v23 – уменьшение скорости за время t12 и t23 За время переключения передач скорость ПА уменьшается на v12и v23 (см. рис. 6.8). Если время переключения передач невелико (0,5 – 1,0 с), то можно считать, что при переключении передач движение происходит с постоянной скоростью. Таблица 6.3
Ускорение ПА при разгоне на участках АВ,CD определяется по формуле которая получена после преобразования формулы (6.46). Так как с увеличением номера передачи динамический фактор ПА уменьшается (см. рис. 6.7), то максимальные ускорения разгона достигаются на низких передачах. Поэтому водители ПА для обеспечения быстрого разгона при обгоне в городских условиях используют низкие передачи чаще, чем водители других АТС. 6.2. Аварийная безопасность пожарного автомобиля 6.2.1. Тормозные свойства пожарного автомобиля Тягово-скоростные и тормозные свойства АТС связаны между собой. Чем больше vmax , max и tv , тем лучше должны быть тормозные свойства ПА. Повышенные требования к тормозным свойствам ПА вызваны также и тем, что при следовании к месту вызова с высокой скоростью водители ПА вынуждены в 3 – 5 раз чаще, чем водители других АТС, использовать торможение для обеспечения безопасности движения. Возможно несколько способов торможения ПА: без использования тормозной системы (движение накатом при следовании ПА к месту вызова используется редко); только тормозной системой; совместно тормозной системой и двигателем; только двигателем (двигатель работает чаще всего в режиме холостого хода с включенным зажиганием или при незначительном нажатии водителем на педаль подачи топлива и включении более низкой передачи, чем перед началом торможения). Тормозная система ПА служит для замедления его движения, вплоть до полной остановки, и для удержания на месте при стоянке. Тормозное управление ПА включает следующие системы (ГОСТ 22895–77): рабочую тормозную систему (ножную) – используется при всех режимах торможения для уменьшения скорости и полной остановки ПА; запасную тормозную систему – используется при отказе рабочей тормозной системы и обеспечивает не менее 30 % эффективности работы по тормозному пути; стояночную тормозную систему – обеспечивает стоянку автомобиля на уклонах (i% 18); вспомогательную тормозную систему (тормоз-замедлитель) – используется при длительном торможении на спусках для поддержания постоянной скорости. Вспомогательной тормозной системой должны быть оборудованы ПА с общей массой более 12 т или ПА с общей массой более 10 т, использующие прицепы. Если ПА с общей массой более 3,5 т эксплуатируется в горных условиях, то также используют вспомогательную тормозную систему. Для оценки эффективности работы рабочей и вспомогательной тормозных систем используют три показателя (ГОСТ 25478–82): тормозной путь Sт, м; установившееся замедление jT , м/с2; время срабатывания тормозов tT,с. Экспериментально установлено, что этими показателями можно достаточно полно характеризовать процесс торможения АТС (рис. 6.9).  Рис. 6.9. Торможение пожарного автомобиля: 1 – j(t); 2 –v(t) Время t1 зависит от реакции водителя, от времени, за которое он принимает решение о торможении и переносит ногу с педали управления подачей топлива на педаль тормоза. Время t1 зависит от индивидуальных особенностей и квалификации водителя, обычно t1= 0,4 – 1,5 с. При расчетах принимают t1= 0,8 с. Время t2 зависит от конструкции и технического состояния привода тормозов, от времени, за которое выбирается свободный ход педали тормоза, и управляющее усилие водителя передается к колесным тормозам. У ПА с гидравлическим приводом тормозов t2 = 0,2 – 0,4 с, с пневматическим приводом t2= 0,6 – 0,8 с. Время t2 неисправного гидравлического привода (при наличии воздуха в системе или неисправности клапанов в главном тормозном цилиндре) увеличивается, тормоза срабатывают со второго (t2= 0,6 с) или третьего (t2 1,0 с) нажатия. Время t2 тормозов ПА с пневматическим приводом может увеличиваться зимой после продолжительной работы на пожаре из-за уменьшения сечения трубопровода замерзающим конденсатом. У ПА с гидропневматическим приводом тормозов (например, на шасси «Урал») t2 0,4 с. Время t2 всех приводов уменьшается при более быстром нажатии на педаль тормоза. Время t3 зависит от массы ПА, типа и состояния дорожного покрытия. При экстренном торможении время t3 пропорционально массе ПА и коэффициенту , на дорогах с малым масса ПА на времяt3практически не влияет. Время tт= t2+ t3 является одним из трех показателей эффективности работы тормозной системы и определяется при диагностировании ПА на тормозном стенде. Для ПА с 3,5 т < G < 12 т время tт 1 с, для ПА с G > 12 т tт < 1,2 с (ГОСТ 25478–82). Контролировать tт при ходовых испытаниях ПА сложно. Время t4 представляет собой время торможения с максимальным ускорением (замедлением) jт За время t4 кинетическая энергия АТС расходуется в основном на работу сил трения тормозов и частично на работу сил сопротивления движению (Рf, Рв). Если при торможении колеса заблокированы (не вращаются), то работа сил трения происходит только между шиной и поверхностью дороги. Трение в тормозном механизме как поглотитель энергии АТС при блокировке колес уже не действует. Если колеса АТС заблокированы, то после преобразования уравнения (6.1) при = 1, Рк= 0, Рf = Р, Рi = Pв = 0 с учетом формулы (6.40) получим формулу jт = g (6.53) для определения максимального замедления автомобиля при торможении всеми колесами. Так как при увеличении буксования колес уменьшается (см. рис. 6.3), то для увеличения jт и, следовательно, уменьшения Sт достигать полной блокировки колес при торможении нежелательно. При торможении ПА сила инерции Pj (6.24) увеличивает нагрузку на передние колеса и уменьшает на задние. Наибольшие значения коэффициентов изменения нормальной реакции ПА находятся в следующих пределах (6.35) и (6.36): 12 =1,2 – 2,0; 34 = 0,5 – 0,7. Поэтому для обеспечения торможения с jт необходимо такое распределение тормозных усилий между передними и задними колесами, при котором блокировка колес происходит одновременно. Так как современные тормозные системы ПА не обеспечивают точного соответствия между нормальной реакцией Rn колес и их тормозных усилий, то действительное значение jт меньше теоретически возможного в Кэ = 1,4 – 1,6 раз. Тормозной путь Sт при полной блокировке колес определяется как площадь, ограниченная кривой 1 за время t3 + t4 (см. рис. 6.9), т. е.  = – + (6.54) После преобразования формулы (6.54) с учетом формулы (6.53) и tт1 – 1.2 с формула для определения тормозного пути ПА примет вид: Sт= (Кэ/2) где v0 – скорость автомобиля перед торможением, м/с. Для предварительной оценки эффективности работы рабочей и запасной тормозных систем ПА проводят ходовые испытания. Испытания могут проводиться визуально по Sт и синхронности начала торможения колес при резком однократном нажатии на педаль (сцепление выключено), а также с использованием переносных приборов-деселерометров (или деселерографов). Диагностирование по тормозному пути Sт должно проводиться на ровном, сухом, горизонтальном участке дороги, свободном от движущегося транспорта. В соответствии с ГОСТ 25478–82 тормозной путь определяется при v0= 11,1 м/с (40 км/ч). Для ПА с G=3,5 т рабочая тормозная система должна обеспечить Sт 23 м, запасная – Sт 36,9 м. При отсутствии деселерометра (или деселерографа) ускорение jт вычисляется по формуле jт = v02/Sт, (6.56) где v0 в м/с; Sт в м. Для ПА с G > 3,5 т рабочая тормозная система должна обеспечить jт 4,0 м/с2, запасная – jт 2,1 м/с2. Тормозной путь Sт и установившееся замедление jт должны обеспечиваться тормозными системами ПА с G > 3,5 т при усилии на педали тормоза не более 0,7 кН (70 кгс). Стояночная тормозная система должна обеспечивать стоянку ПА на уклоне i < 18 % при усилии на рычаге тормоза не более 0,4 кН (40 кгс). Вспомогательная тормозная система должна обеспечивать движение ПА на спуске с i = 7 % протяженностью 7 км с постоянной скоростью не более 30 км/ч. | ||||||||||||||