Ргр «автоматизированный Электропривод» По Электронике (Артыков Э. С.). Ргр «автоматизированный Электропривод» По Электронике (Артыков Э. Эсу энергетическая (силовая) часть системы управления. Ису
 Скачать 1.24 Mb. Скачать 1.24 Mb.
|

|
Введение Электроприводом называется электромеханическое устройство, предназначенное для приведения в движение рабочих органов машин и управления технологическими процессами. ЭП состоит из преобразовательного, электродвигательного, передаточного и управляющего устройств. ЭП может быть автоматизированным и неавтоматизированным; первый в отличие от второго имеет систему автоматического управления (САУ) и обеспечивает рациональное ведение технологического процесса. Полиграфические машины последнего времени оснащены большим количеством электроприводов постоянного и переменного тока различной сложности – от простейших нерегулируемых электроприводов до сложных многоконтурных систем с подчиненным регулированием с двигателями постоянного и переменного тока различной мощности – от сотен ватт до сотен киловатт. Современная система автоматического управления электроприводом может быть успешно реализована при использовании последних достижений в области электроники, преобразовательной техники, микропроцессорной техники и электронных вычислительных машин. Блок-схема автоматизированного ЭП может выглядеть следующим образом: 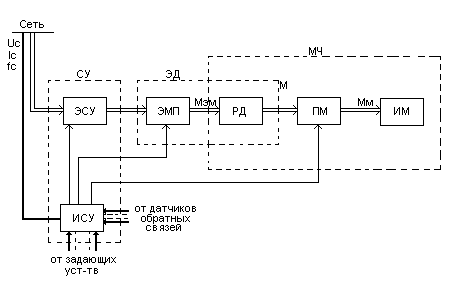 Рис.1 Структурная схема автоматизированного электропривода ЭСУ – энергетическая (силовая) часть системы управления. ИСУ – информационная часть системы управления. СУ – система управления. МЧ – механическая часть электропривода. ЭД – электродвигатель. РД – ротор двигателя. ЭМП – электромеханический преобразователь. ПМ – передаточный механизм. ИМ – исполнительный механизм. Цель работы – расширить, углубить и закрепить знания, полученные студентами на лекциях лабораторных занятиях, а также приобретение навыков самостоятельного проектирования САУ электроприводами Содержание
1. Исходные данные.
2. Нагрузочная диаграмма и механическая характеристика машины Нагрузочная диаграмма машины  Механическая характеристика машины  Диапазон регулирования скорости 3. Расчет требуемой мощности и выбор электродвигателя. Исходной информацией для расчета требуемой мощности электродвигателя является нагрузочная диаграмма машины Расчетная мощность для Из каталога выбираю 3-х фазный
Момент инерции двигателя Передаточное число редуктора Механическая характеристика двигателя 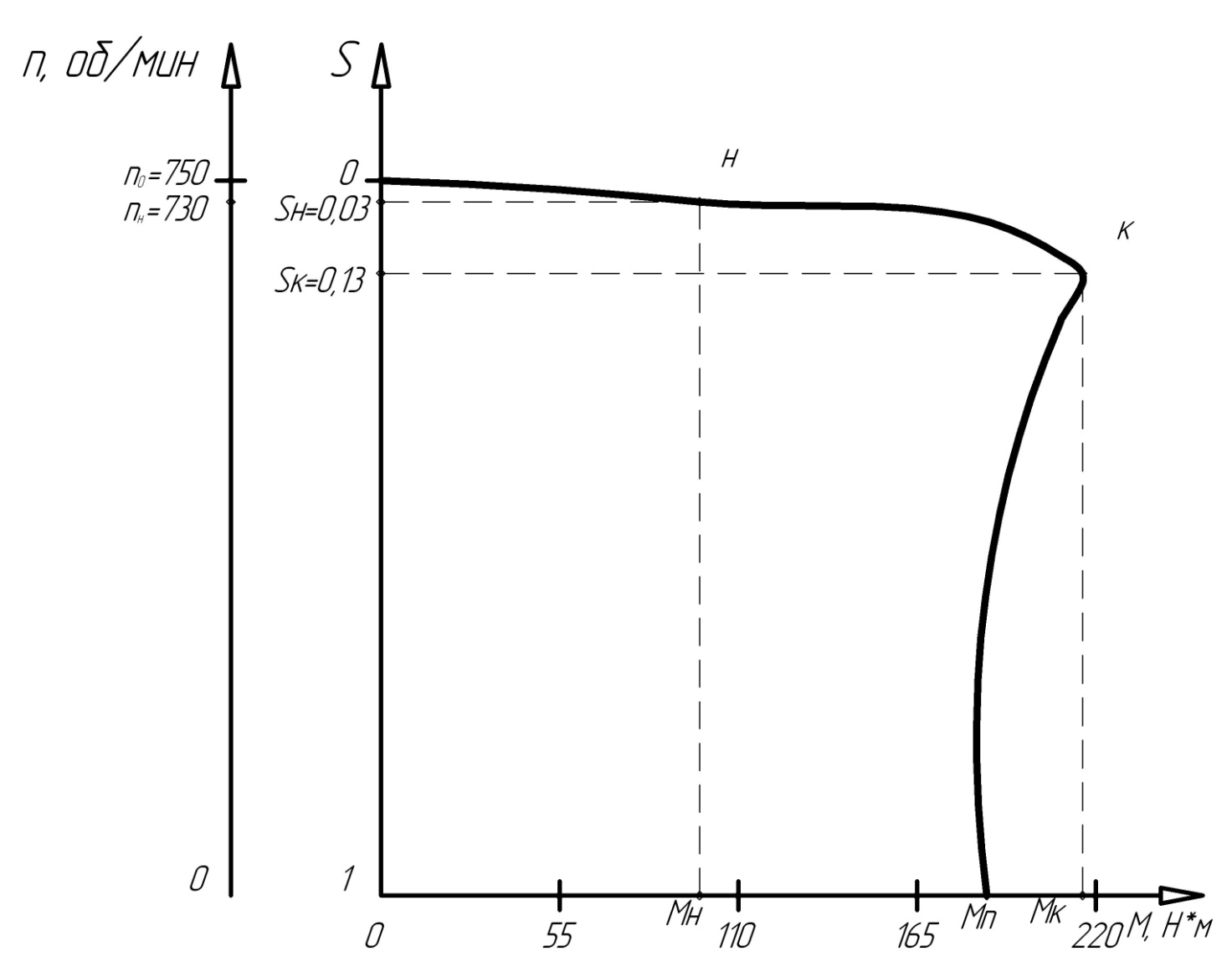 4. Разработка функциональной схемы электропривода Проектирование систем электропривода обычно проводится от простого к сложному. Прежде всего, необходимо на основе требований к электроприводу, изложенных в техническом задании, рассмотреть возможность использования разомкнутой (без внешних обратных связей) системы автоматического управления (САУ) электроприводом (ЭП). Для этого необходимо определить перепад частоты вращения двигателя В электроприводах по системе «ПЧ-АД» используется ПЧ, имеющие тормозной прерыватель и тормозное сопротивление, и без них. Выбор того или иного варианта ПЧ зависит от необходимости использования режима динамического торможения АД к.з.р для обеспечения заданного значения времени торможения, Здесь J- общий момент инерции привода; Из приведенного ниже выражения следует:  Момент тормозной механический средний: Среднее значение тормозного электрического момента:  Цепь динамического торможения АД питается от звена постоянного тока (ЗПТ) ПЧ, Тогда требуемое значение тока тормозного Сопротивление тормозного резистора: Мощность тормозного резистора: Модель преобразователя EI-9011-015-H
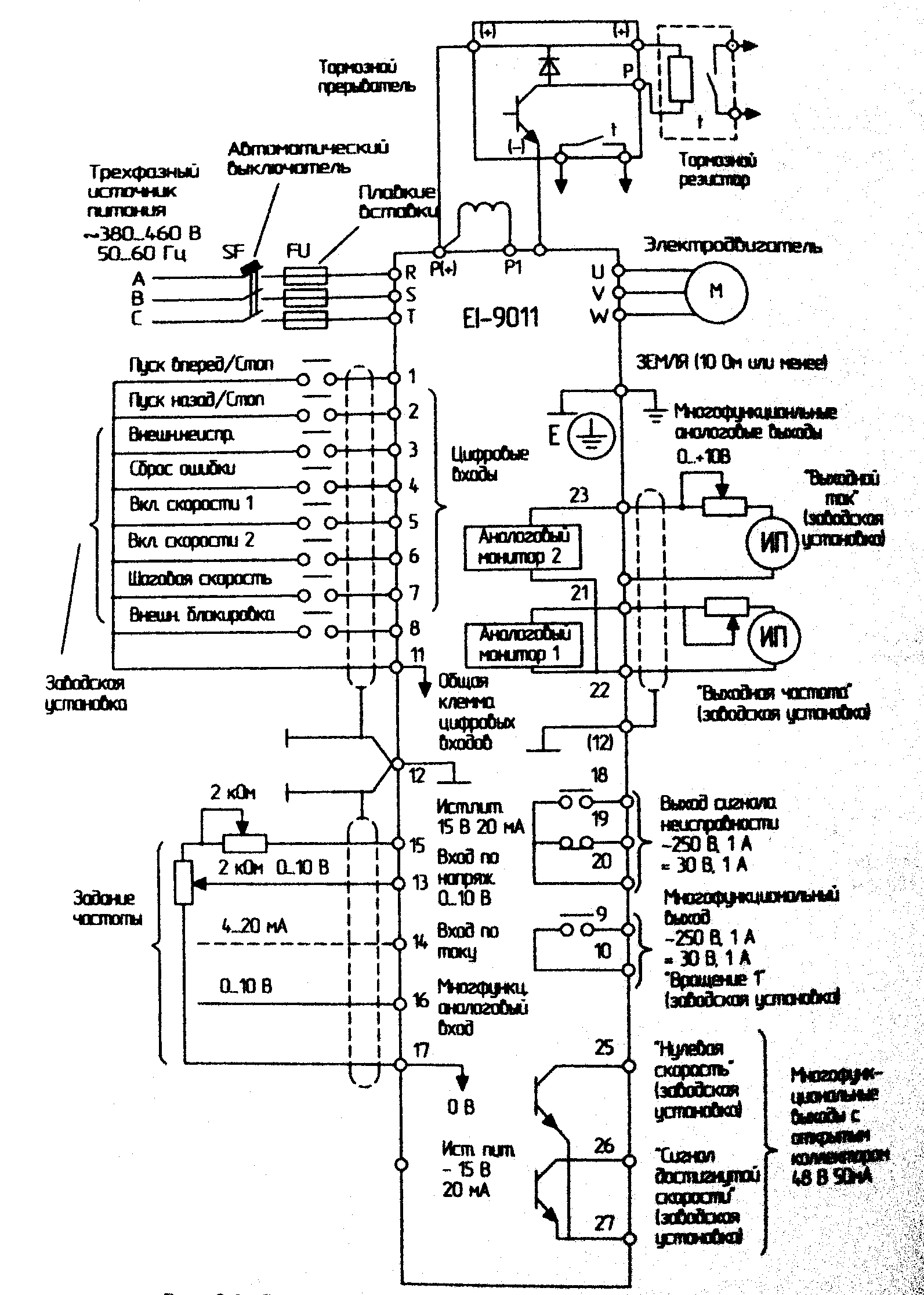 Схема преобразователя частоты с прерывателем и тормозным резистором Функциональная схема САУ ЭП. 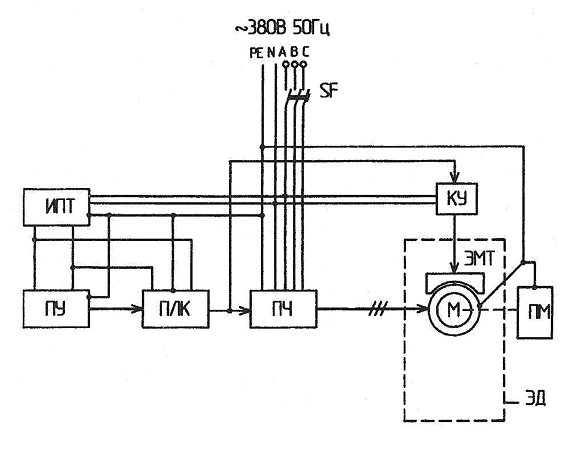 SF – автоматический выключатель; ИПТ – стабилизированный источник постоянного тока; ПЛК – программируемый логический контроллер; ПЧ – преобразователь частоты; ТУ – тормозное устройство; КУ – коммутационное устройство; ЭМТ – электромеханический тормоз; ИДС – импульсный датчик скорости; ПМ – полиграфическая машина; ЭД – асинхронный двигатель с к.з.р. с встроенным ЭМТ и ИДС; ПУ – пульт управления ПМ. 5. Разработка алгоритма работы печатной машины и программирование ПЛК. В большинстве полиграфических машин (ПМ) и агрегатов предусмотрены режимы «Толчок вперед», «Толчок назад»; в этом случае работа машины происходит, пока нажата соответствующая кнопка. Этот режим используется при проведении пуско-наладочных работ. Скорость в этом режиме составляет 1-10% от номинальной скорости вне зависимости от типа машины. В этом режиме возможна подача звукового сигнала при первом включении. Режим «Медленно» или «Заправка» предусматривает длительный режим работы машины на скорости 1-10% от номинальной. В этом режиме работы обязательна подача звукового и светового сигнала перед пуском. Режим «Рабочая скорость» предусматривает длительный режим работы машины на скорости, установленной оператором. Как правило, в схемах управления полиграфических машин пуск на рабочую скорость может осуществляться только после режима «Медленно» или «Заправка». На всех режимах работы ПМ одновременно с включением электродвигателя происходит автоматическое включение катушки электромагнитного тормоза, в результате чего происходит растормаживание машины. В настоящее время управление полиграфическими машинами осуществляется посредством промышленных логических контроллеров (ПЛК). Входы ПЛК связаны с кнопками управления всеми режимами работы, а также с кнопками управления технологическими процессами (включение красочного и увлажняющего аппаратов печатных машин, включение и выключение натиска, задание рабочей скорости и т.д.) технологическими блокировками и блокировками безопасности. Релейно-контакторная схема управления приводом обеспечивает выполнение всех необходимых команд. Она питается напряжением 220 В постоянного тока от отдельного выпрямителя, который на схеме не показан. Этот выпрямитель включается автоматом SF1. Кроме катушек реле, контакторов и кнопок управления в схеме имеется катушка электромагнита YB, растормаживающего машину. Она питается напряжением 220 В переменного тока. Включение автомата SF1. после подачи питания на схему включается промежуточное реле К1. имеющийся в цепи катушки К1 контакт концевого выключателя SQ замкнут, когда рукоятка для ручного проворота машины не надета. Одновременно получают питание катушки реле времени КТ1 и КТ2, и эти реле подготавливаются к отсчету времени. Команда «Толчок вперед». Нажатие кнопки SB2 приводит к включению реле К2, контакторов КМ1, КМ3 и электромагнита YB. Машина растормаживается. Узел задания скорости получает питание. Напряжение с потенциометра R2 через замкнутый контакт реле K5 и резистор R6 поступает на конденсатор С1. Двигатель трогается с места и через 0,4-0,5 с выходит на заправочную скорость, составляющую около 10% от номинальной. После отпускания кнопки SB2 схема возвращается в исходное состояние. Так как катушка YB отключилась, пружины сжимают колодки механического тормоза и машины быстро останавливается. Команда «Толчок назад». Нажатие кнопки SB3 приводит к включению реле К3, контакторов КМ2, КМ3 и электромагнита YB. Отличие от предыдущего состоит лишь в том, что двигатель вращается в обратную сторону. Контакты КМ2 и КМ3 в цепи катушки КМ1 и контакты КМ1 и К2 в цепи катушки КМ2 предотвращают одновременное включение контакторов КМ1 и КМ2. Команда «Медленно». Нажатие кнопки SB4 приводит к включению реле К4. Один контакт этого реле шунтирует кнопку, и ее можно отпустить. Другой контакт включает звонок НА, предупреждающий о предстоящем пуске машины. Третий контакт размыкает цепь катушки реле времени КТ1, и оно начинает отсчет. Четвертый контакт подготавливает цепь для включения К2. Через 3 секунды якорь реле времени КТ1 отпадает. Один контакт КТ1 отключает звонок НА, а другой – включает реле К2. Далее схема работает так же, как при команде «Толчок». Двигатель выходит на заправочную скорость и работает на ней до подачи другой команды. Команда «Включение натиска». Механизм давления (натиск) включают, когда машина работает на заправочной скорости. Реле К5 еще не включено, его контакт в цепи кнопки SB6 замкнут, и поэтому нажатие этой кнопки приводит к включению реле К6 и электромагнита натиска. Схема не разрешает включать натиск на высокой скорости во избежание поломок. В зоне рабочих скоростей контакт К5 в цепи кнопки SB6 разомкнут. Команда «Пуск». Нажатие кнопки SB5 приводит к включению реле К5. В узле задания скорости переключается конденсатор С1 на заряд от потенциометра R1. Скорость двигателя плавно увеличивается. Машина выходит на рабочую скорость. Команда «Стоп». Нажатие кнопки SB1 возвращает схему в исходное состояние. Машина затормаживается механическим тормозом. 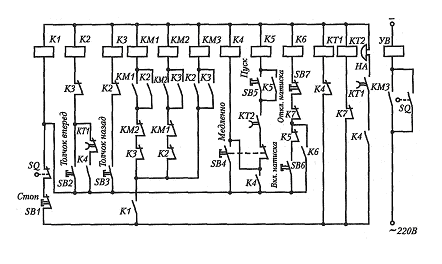 6. Разработка принципиальной схемы электропривода. Основанием для разработки принципиальной схемы электропривода являются: функциональная схема ЭП, в состав которой входят ранее обоснованные и выбранные узлы, элементы и устройства. На рис. 4 приведена принципиальная схема системы автоматического управления электроприводом печатной машины. В состав принципиальной схемы системы автоматического управления электроприводом печатной машины входят: А0 – пульт управления; А1 – источник питания; А2 – программируемый логический контролер; А3 – преобразователь частоты; М – трехфазный асинхронный двигатель с коротко-замкнутым ротором; SF1 – автоматический выключатель. 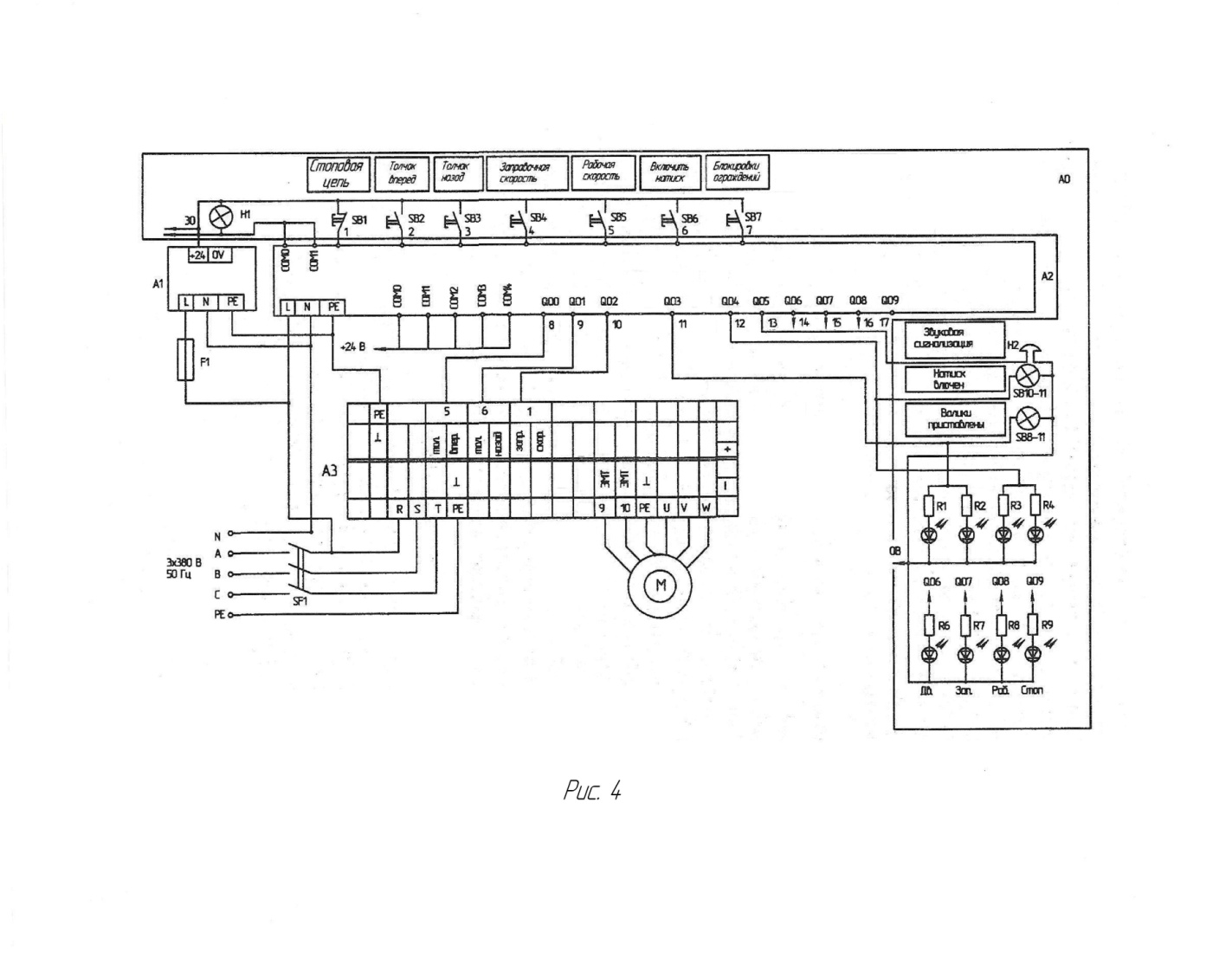 7. Анализ возможности применений разработанной САУ ЭП. Данную САУ ЭП возможно использовать для приведения в действие листовой печатной машины среднего формата и управления ею. К главному электроприводу ЛПМ предъявляются следующие требования: работа машины в режимах «Толчок», «Заправка» и «Рабочая скорость», обеспечение плавного нарастания скорости во всех режимах работы с заранее заданной интенсивностью; точность поддержания заданной скорости во всем диапазоне ее регулирования. Требованиям, предъявляемым к главным электроприводам ЛПМ, отвечает электропривод, построенный по системе «преобразователь частоты – асинхронный двигатель с короткозамкнутым ротором» с векторным управлением без внешней обратной связи по скорости. Разработанная САУ ЭП отвечает всем вышеперечисленным требованиям и готова к использованию. Список использованной литературы
М.: Высш. шк., 2007 – 560 с.: ил. Кинематическая схема приводаКинематическая схема представлена на рис.2. и содержит следующие обозначения: ЭД – электродвигатель, СМ1, 2, 3 – соединительные муфты, причем каждая состоит их двух полумуфт, Ш1,2 – шкивы клиноременной передачи вращающего момента, Р – редуктор; Количество шестерен которого зависит от передаточного числа, ПМ – передаточный механизм, предназначен для приведения в соответствие частоты вращения двигателя с частотой вращения вала рабочей машины. РМ - рабочая машина. 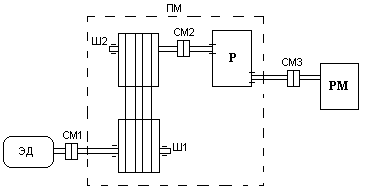 Рис.2. Кинематическая схема привода Упрощенная кинематическая схема: Jдв– момент инерции двигателя; – угловая скорость вала двигателя; М – вращающий момент на валу двигателя; Мс – момент сопротивления машины, приведённый к валу двигателя; Р – мощность на валу двигателя; Jп –момент инерции передаточного механизма; iп – передаточное число редуктора; п – коэффициент полезного действия передаточного механизма; м – скорость вала рабочего органа машины; Мм – вращающий момент на валу рабочего органа машины; Мс.м – момент сопротивления на валу рабочего органа машины; Jм – момент инерции рабочего органа машины; Рм– мощность на валу рабочего органа машины. 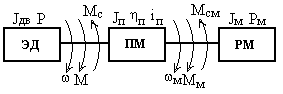 Рис. 3. Упрощенная кинематическая схема привода Jмзависит от массы и геометрических размеров всех движущихся частей рабочей машины. В инженерных расчетах в механических звеньях, обладающих небольшими зазорами и незначительной упругостью, механические связи принимаются упругими. При этих допущениях движение одного элемента дает информацию о движении всех остальных. В электроприводе за базовый элемент берут вал ЭД. | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||