лабораторная работа по тау, уберт. ЛР 6 ТАУ. Лабораторная работа 6 исследование свойтва линейной системы с типовым пидрегулятором Факультет авт преподаватель Уберт Алексей Игоревич
 Скачать 211.82 Kb. Скачать 211.82 Kb.
|

|
МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ «НОВОСИБИРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ» Кафедра Автоматики Лабораторная работа № 6 «ИССЛЕДОВАНИЕ СВОЙТВА ЛИНЕЙНОЙ СИСТЕМЫ С ТИПОВЫМ ПИД-РЕГУЛЯТОРОМ» Факультет: АВТ Преподаватель: Уберт Алексей Игоревич Группа: АА-97. Студент: Гуляева Э. Новосибирск 2021 Цель работы. Изучить различные способы определения параметров типового ПИД-регулятора. Исследовать свойства линейной системы с объектом второго порядка и ПИД-регулятором. Порядок выполнения работы. Снять переходную характеристику объекта управления в соответствии с вариантом. Определить перерегулирование и время переходного процесса.  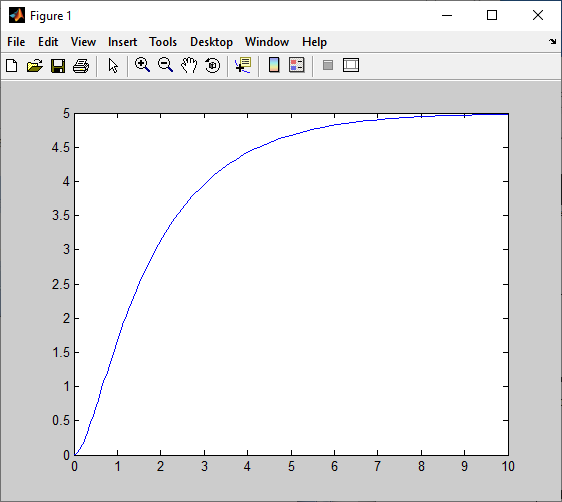 Рис. 1. Переходная характеристика объекта. Рассчитать коэффициенты ПИД-регулятора  различными методами. различными методами. Р 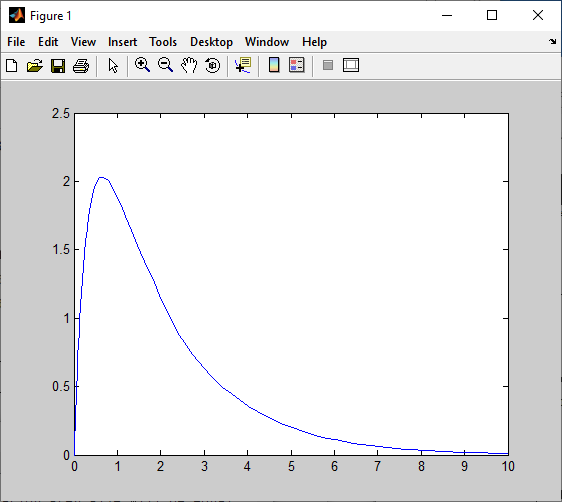 ис. 2. Переходная характеристика объекта ис. 2. Переходная характеристика объектаРис. 3. График производной 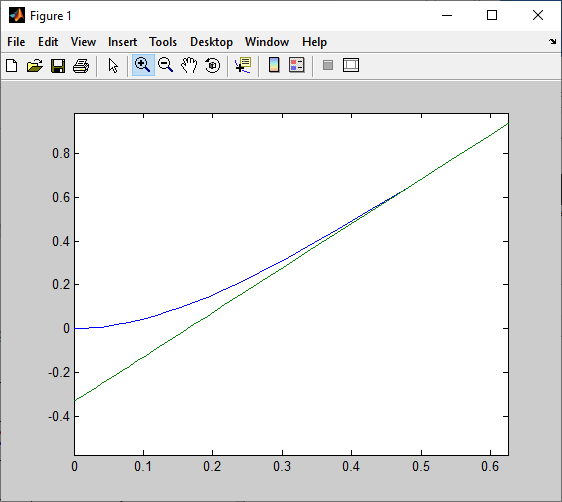 Рис. 4. Касательная к графику переходного процесса   Метод Циглера-Никольса:   Метод Чина-Хронеса-Ресвика:   Спектральный метод:      Снять переходные процессы в системе и оценить их качество при различных рассчитанных значениях параметров регулятора. Сравнить полученные результаты и выбрать коэффициенты регулятора, при которых достигается наилучший результат. Метод Циглера-Никольса: 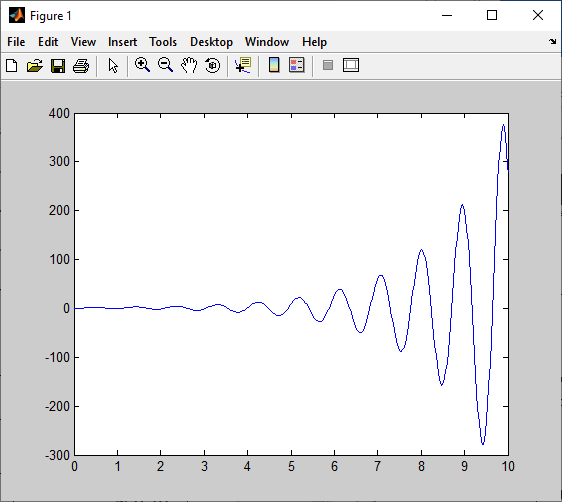 Рис. 5. Переходная характеристика объекта. При рассчитанном значении процесс расходится, поэтому увеличим коэффициент до  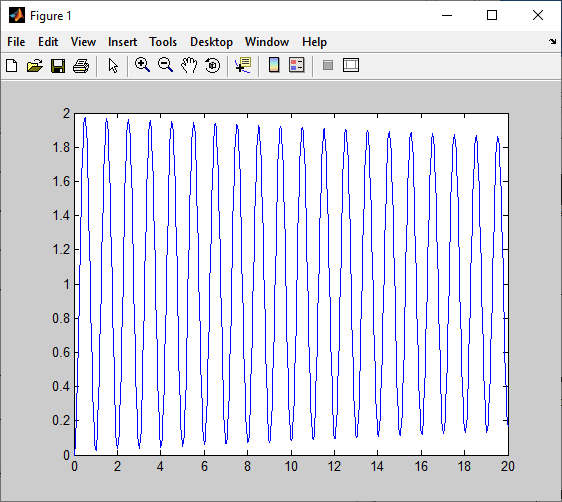 Рис.6. Переходная характеристика объекта. Метод Чина-Хронеса-Ресвика: 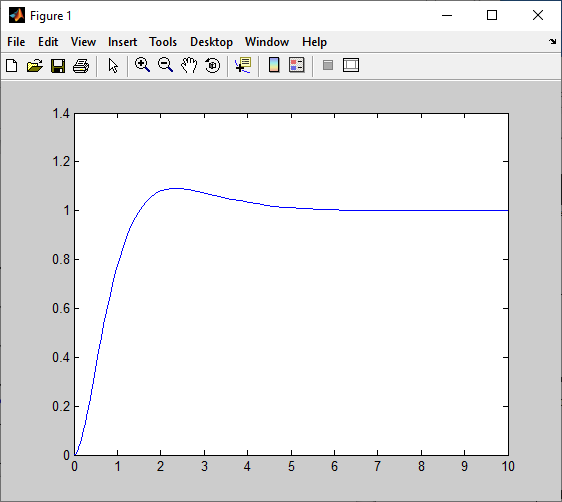 Рис.7. Переходная характеристика объекта. Спектральный метод: 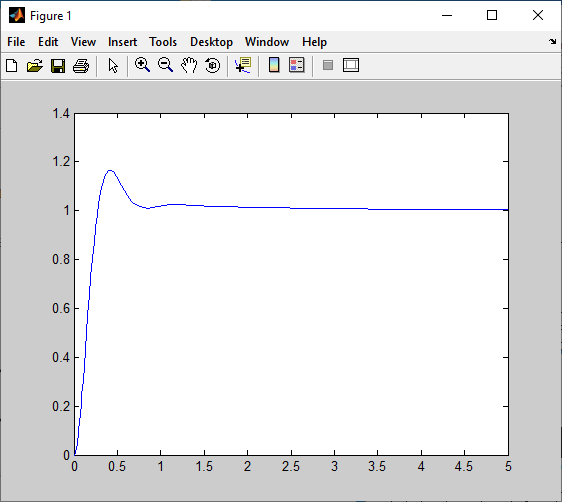 Рис.8. Переходная характеристика объекта. Для выбранного в п. 2.3. регулятора провести исследование влияния параметров регулятора на процессы в системе. С этой целью необходимо последовательно изменять один из параметров в 2 раза в сторону увеличения и уменьшения при остальных неизменных коэффициентах. Для метода Чина-Хронеса-Ресвика 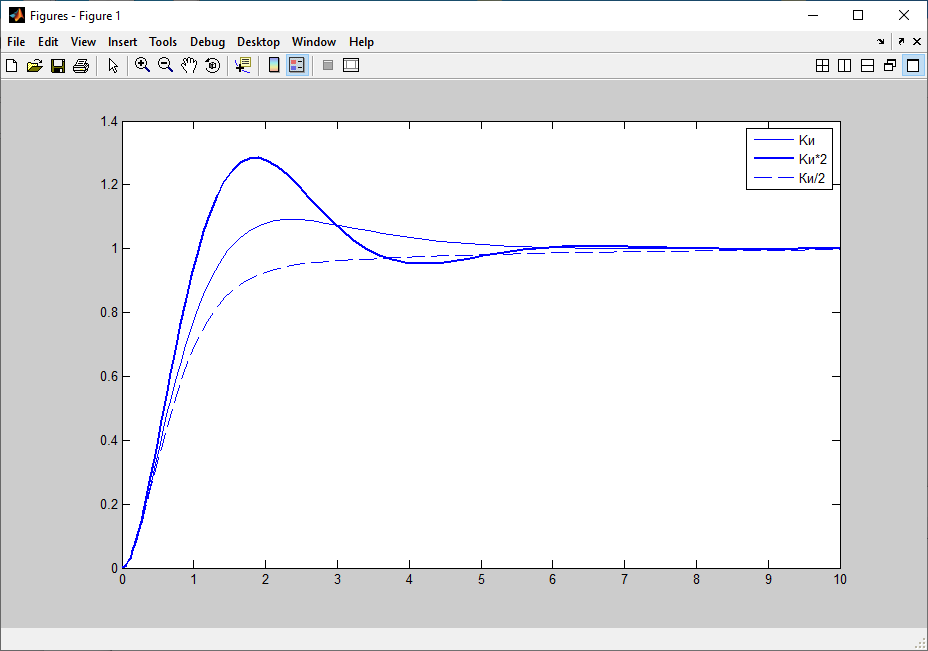 Рис. 9. Переходная характеристика объекта, изменяем коэффициент КИ 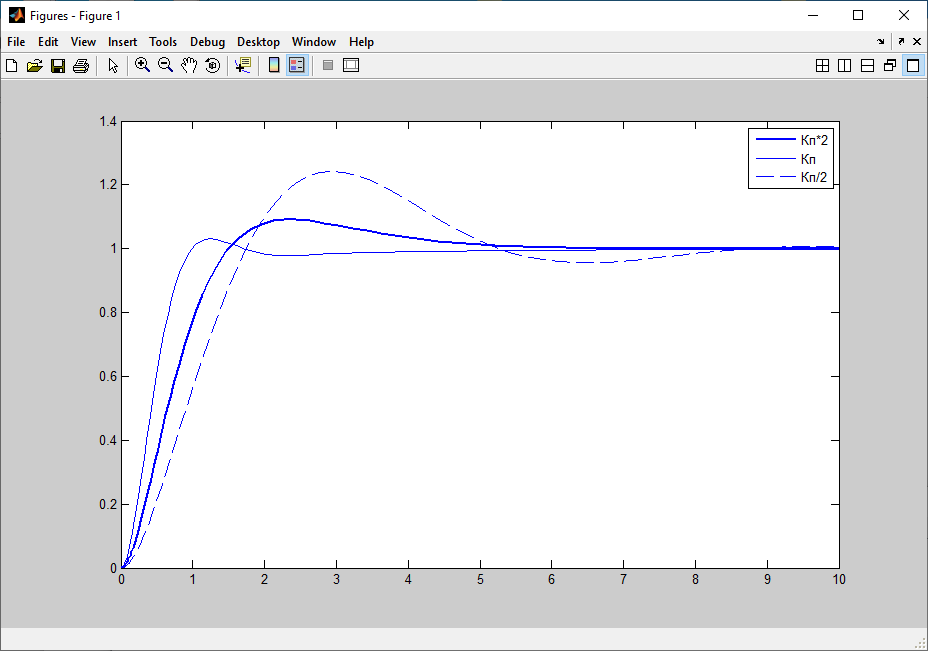 Рис. 10. Переходная характеристика объекта, изменяем коэффициент КП 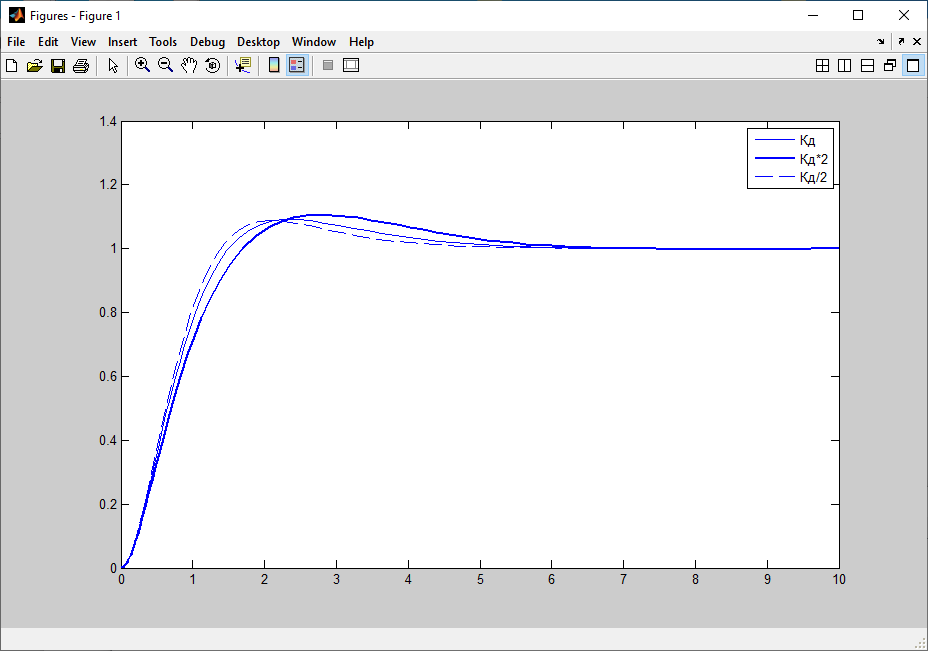 Рис. 11 Переходная характеристика объекта, изменяем коэффициент КД По результатам исследования п. 2.4. попытаться вручуню подобрать коэффициенты ПИД-регулятора, обеспечивающие наилучшее качество переходного процесса в системе. 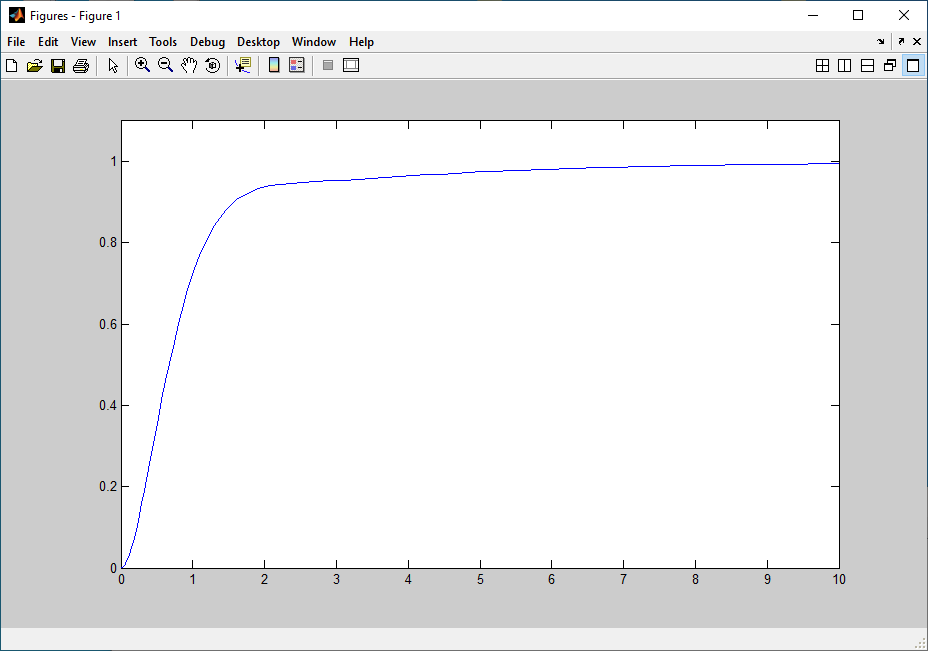 Рис. 12. Переходная характеристика объекта,   Вывод. В результате выполнения лабораторной работы мы изучили способы определения параметров ПИД-регуляторов. ПИД-регулятор состоит из трёх каналов: пропорционального с коэффициентом КП, интегрального с коэффициентом КИ и дифференциального с коэффициентом КД. Коэффициенты регулятора КП, КИ, КД рассчитываются различными способами из условия обеспечения желаемых динамических и статических свойств в системе. Вычислив коэффициенты регулятора тремя методами – метод Циглера-Николса, метод Чина-Хронеса-Ресвика, Спектральный метод, сравнили полученные результаты и выбрали коэффициенты, при которых достигается наилучший результат. В расчете метода Циглера-Никольса увеличили коэффициент КД в 10 раз, так как при исходном коэффициенте система оказалась неустойчивой. Проследили влияние параметров регулятора КП, КИ и КД на процессы в системе для коэффициентов, рассчитанных по методу Чина-Хронеса-Ресвика. Выяснили, что чем больше коэффициент КИ, тем больше максимальное значение. Коэффициент КП и КД влияет на время переходного процесса и на величину максимального значения. |