|
|
ЭФУСА контрольная. Контрольная работа. Фгоу во кгту
ФГОУ ВО «КГТУ»
Кафедра электрооборудования судов и электроэнергетики
Дисциплина: Элементы и функциональные устройства судовой автоматики
«Контрольная работа»
Вариант 5
Работу выполнил студент гр. 17-ЗЭА
Плюхин А.
Проверил: Паллаг С.П.
Калининград 2020
Задание на Контрольную работу.
Контрольная работа состоит из двух заданий.
Первое задание выполняется на тему «Первичные измерительные преобразователи и датчики». Форма представления результата – реферат. Для потенциометрических преобразователей необходимо выполнить следующее. Описать принцип действия устройств подобного рода, дать необходимые расчетные соотношения.
Провести сравнительный анализ различных возможных принципов построения, определить достоинства и недостатки различных вариантов, их области применения.
Собрать и обобщить информацию об изделиях, выпускаемых отечественной и зарубежной промышленностью. Преимущественное внимание следует уделить изделиям, применяемым на судах.
Определить современные тенденции в развитии данного вида техники.
Второе задание заключается в описании термоэлектрического преобразователя. Следует описать возможные варианты выполнения заданного преобразования с использованием различных принципов и различной элементной базы, раскрыть происходящие в устройстве процессы, дать основные расчетные соотношения, привести примеры схемотехнической реализации.
Задание 1.
Преобразователи перемещения.
Индуктивные преобразователи
Индуктивные преобразователи служат для преобразования угловых и линейных перемещений в электрический сигнал. На рис. 2.9 показана схема простейшего индуктивного преобразователя, состоящего из магнитного сердечника 1 с обмоткой 2 и якоря 3. Между полюсами сердечника и якорем имеется воздушный зазор δ.
Расчет магнитных цепей изучен в ТОЭ. Примем допущения (довольно грубые):
потоками рассеяния и потерями в стали пренебрегаем;
магнитное сопротивление воздушного зазора много больше магнитного сопротивления магнитопровода;
индуктивное сопротивление обмотки много больше активного ее сопротивления и сопротивления нагрузки.
При этих допущениях действующее значение выходного напряжения преобразователя
 (2.15) (2.15)
В приведенном выражении переменной величиной является δ. График зависимости Uвых(δ) представляет собой прямую, проходящую через начало координат (рис. 2.10, штриховая линия). Реальная характеристика показана сплошной линией.
Отличие реальной характеристики от линейной при малых значениях δ объясняется тем, что при таких δ магнитное сопротивление магнитопровода преобразователя становится соизмеримым с магнитным сопротивлением воздушного зазора, поэтому пренебрежение величиной приводит к появлению погрешности. Отклонение реальной характеристики от линейной при больших значениях δ объясняется тем, что индуктивность существенно уменьшается, поэтому индуктивное сопротивление становится соизмеримым с активным сопротивлением, что и вызывает отклонение характеристики.
Рассмотренный индуктивный преобразователь имеет следующие недостатки: а) невысокая линейность; б) на якорь постоянно действует электромагнитная сила, стремящаяся притянуть его к полюсам сердечника. Из-за указанных недостатков такие преобразователи применяются редко.
Реверсивные индуктивные преобразователи. Получили наиболее широкое распространение. Существуют две основные схемы включения реверсивных индуктивных преобразователей: дифференциальная и мостовая. Дифференциальная схема включения показана на рис. 2.11, а. Реверсивный индуктивный преобразователь состоит из двух простейших.
Магнитная система имеет два одинаковых сердечника I и II и общий якорь III. Обмотки сердечников содержат одинаковое число витков. Сопротивление нагрузки включается между средней точкой вторичной обмотки трансформатора TV и средней точкой обмоток сердечников. При таком включении ток нагрузки равен разности токов верхней и нижней половин схемы:
İ = İ1 – İ2. (2.16)
При активной нагрузке Zн = Rн выходное напряжение равно
Ůн = Rн (İ1 – İ2) = Ů1 – Ů2. (2.17)
В нейтральном положении якоря (х = 0) зазоры между полюсами сердечника и якорем одинаковы: δ1 = δ2 = δ0. Индуктивности обмоток также равны: L1 = L2, поэтому токи I1 и I2 равны по модулю, а ток нагрузки I = 0. Следовательно, и выходное напряжение преобразователя равно нулю. Таким образом, при входном сигнале, равном нулю, выходной сигнал также равен нулю.
Перемещение якоря вверх приведет к уменьшению верхнего воздушного зазора и увеличению нижнего:
δ1 = δ0 – х; δ2 = δ0 + х, (2.18)
где х – перемещение якоря.
Изменение зазоров вызовет увеличение индуктивного сопротивления обмотки верхнего сердечника и уменьшение индуктивного сопротивления обмотки нижнего сердечника. При этом ток I1 уменьшится, а ток I2 возрастет. В нагрузке потечет результирующий ток и появится выходное напряжение. Если же якорь перемещается вниз – I2 уменьшится, а ток I1 возрастет, что также вызовет появление результирующего тока, фаза которого на 180° будет отличаться от фазы результирующего тока при перемещении вверх.
Зависимость напряжений U1 и U2 от перемещения можно получить, воспользовавшись кривой на рис. 2.10. При построении кривых следует учесть, что при изменении х от хmax до – хmax δ1 изменяется от 0 до 2δ0, а δ2 изменяется в это же время от 2δ0 до 0. На рис. 2.11, б показаны кривые U1, и U2 и их разность Uвых. Характеристика Uвых = f(x) проходит через начало координат. Изменение знака Uвых при изменении знака x соответствует изменению фазы выходного напряжения преобразователя на 180°.
В мостовой схеме реверсивного индуктивного преобразователя (рис. 2.12) обмотки сердечников включаются в смежные плечи моста. Переменное напряжение подается в одну диагональ моста, выходное напряжение снимается с другой диагонали.
(4.7)
СЕВ
Реверсивные индуктивные преобразователи по сравнению с нереверсивными имеют следующие преимущества:
1) линейная часть выходной характеристики имеет большую протяженность;
2) электромагнитное усилие, действующее на якорь, значительно меньше усилия в нереверсивном преобразователе. Это объясняется частичной компенсацией электромагнитных усилий, действующих со стороны сердечников I и II. Полная компенсация происходит в нейтральном положении якоря.
Рассмотренные реверсивные индуктивные преобразователи позволяют измерять перемещение от нескольких микрон до десятых долей миллиметра. Нижний предел обусловлен технологическими трудностями создания малых воздушных зазоров. Верхний предел объясняется значительным уменьшением чувствительности при больших воздушных зазорах из-за появления потоков рассеяния.
Для измерения больших перемещений применяются цилиндрические реверсивные индуктивные преобразователи. На рис. 2.13 показан реверсивный индуктивный преобразователь, у которого рабочий диапазон измеряемых перемещений достигает нескольких миллиметров.
Магнитопровод преобразователя 2 выполняется в виде цилиндрической трубки, которая вместе с двумя крышками 4 выполняет роль ярма. Якорь 3 также имеет цилиндрическую форму. Диск 1 из ферромагнитного материала предназначен для увеличения магнитной проводимости между трубкой и якорем. По обе стороны от диска устанавливаются две цилиндрические катушки 5. Как правило, преобразователь имеет две одинаковые катушки. Принцип действия преобразователя аналогичен принципу действия реверсивного индуктивного преобразователя, рассмотренного выше.
Включение цилиндрических реверсивных индуктивных преобразователей может производиться как по дифференциальной, так и по мостовой схемам.
Индуктивные преобразователи нашли применение в датчиках уровня, давления, датчиках перемещения рейки топливных насосов дизеля.
Общим недостатком их является гальваническая связь источника и нагрузки.
Тахогенераторы
Общие сведения. Тахогенераторами называются электрические машины, служащие для преобразования механического перемещения вала в электрический сигнал – выходное напряжение. Закон преобразования механической величины в электрическую определяется статической характеристикой тахогенератора. Уравнение статической характеристики идеального тахогенератора имеет следующий вид:
 (2.27) (2.27)
где ω – угловая скорость вала; α – угол поворота вала.
По роду тока тахогенераторы подразделяются на тахогенераторы постоянного и переменного тока.
К тахогенераторам предъявляются следующие основные требования:
линейность выходной характеристики;
большая крутизна выходной характеристики;
малая амплитудная погрешность;
малая фазовая погрешность (для тахогенераторов переменного тока);
минимальная пульсация выходного напряжения (для тахогенераторов постоянного тока);
малый момент инерции ротора и малая электромагнитная постоянная времени;
стабильность выходной характеристики;
малые масса и габариты.
В судовых системах контроля и регулирования тахогенераторы применяются для измерения частоты вращения гребных валов, главных и вспомогательных силовых двигателей, а также для осуществления обратной связи по частоте вращения и для введения сигнала по производной от угла поворота в автоматических системах регулирования.
Тахогенераторы постоянного тока (рис. 2.20) представляют собой генераторы постоянного тока небольшой мощности с постоянными магнитами на статоре или с электромагнитным возбуждением от независимого источника постоянного тока. Наиболее распространены тахогенераторы с номинальной частотой вращения n = 1500 ÷ 3000 об/мин.
При постоянном магнитном потоке возбуждения Ф уравнение якорной цепи имеет вид:
 (2.28) (2.28)
где Uвых – выходное напряжение тахогенератора; E = сеФω – ЭДС тахогенератора; Iя = Uвых/Rн – ток якоря; Rя.ц – сопротивление якорной цепи, равное сумме сопротивлений якоря Rя и перехода щетки – коллектор.
Таким образом,
 (2.29) (2.29)
откуда
 (2.30) (2.30)
В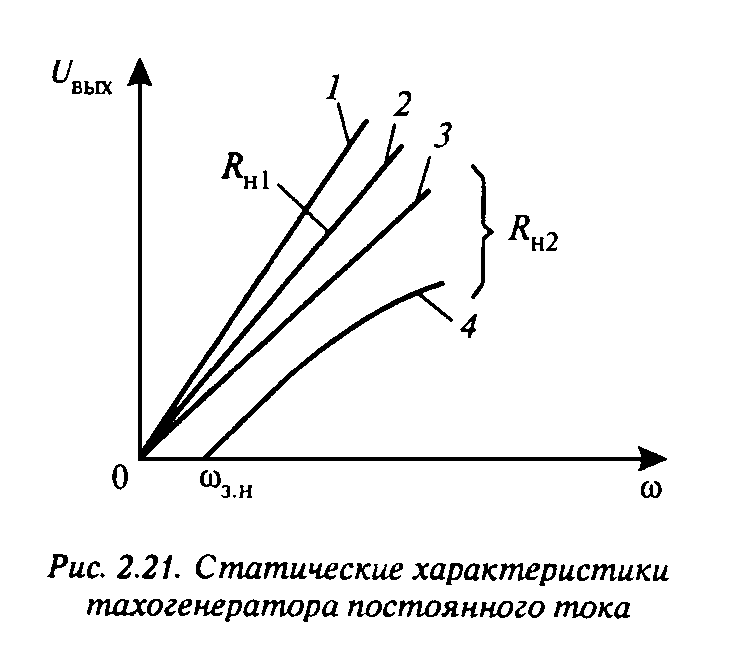
идно, что выходное напряжение изменяется по линейному закону в функции частоты вращения ω. Наклон выходной характеристики зависит от сопротивления нагрузки (рис. 2.21, кривая 1 – х.х., 2 и 3 – с нагрузкой). Уменьшение сопротивления нагрузки приводит к уменьшению крутизны выходной характеристики.
Уравнение получено без учета влияния реакции якоря и величины падения напряжения на переходе щетки – коллектор.
Размагничивающее действие реакции якоря проявляется при возрастании частоты вращения n, так как при этом повышается напряжение U, увеличивается ток Iя тахогенератора, а, следовательно, и МДС якоря. Поэтому при повышенных частотах вращения выходное напряжение U возрастает медленнее, чем увеличивается частота вращения. Статическая характеристика становится нелинейной.
Для графитовых щеток постоянным следует считать не сопротивление перехода щетки – коллектор, а падение напряжения Uщ. Это обусловлено зависимостью сопротивления графита, из которого изготавливают щетки, от плотности тока в нем. Уравнение (2.28) принимает вид:
 (2.31) (2.31)
При этом в области малых частот вращения тахогенератор становится нечувствительным к изменению ω – появляется зона нечувствительности ωз.н.
Вид статической характеристики с учетом реакции якоря и нелинейности щеточного сопротивления – кривая 4 на рис. 2.21 (утрировано).
Для улучшения линейности статической характеристики целесообразно по возможности увеличивать сопротивление нагрузки, так как при малых токах уменьшается реакция якоря. Хорошую линейность дают тахогенераторы с полым или дисковым якорем, так как у них снижается влияние реакции якоря. Для уменьшения зоны нечувствительности в тахогенераторах устанавливают медно-графитовые или серебряно-графитовые щетки.
В тахогенераторах с обмоткой возбуждения изменение температуры окружающей среды приводит к изменению сопротивления обмотки возбуждения и, следовательно, тока возбуждения. Для уменьшения температурной погрешности магнитную систему тахогенератора делают насыщенной и рабочую точку выбирают за коленом кривой намагничивания. В этом случае изменение тока возбуждения почти не влияет на значение магнитного потока тахогенератора.
Определим характер динамического звена.
В переходном режиме уравнение для цепи якоря тахогенератора (без учета реакции якоря и падения напряжения на переходе щетки – коллектор) имеет вид
 (2.32) (2.32)
Подставим сюда выражения для е и iя. Введем обозначения:
 – электромагнитная постоянная времени цепи якоря; – электромагнитная постоянная времени цепи якоря;
 – статический коэффициент передачи тахогенератора. – статический коэффициент передачи тахогенератора.
С учетом этих обозначений уравнение динамики принимает вид:
 (2.33) (2.33)
Отсюда видно, что если входной величиной является угловая скорость якоря, то тахогенератор представляет собой апериодическое звено первого порядка с передаточной функцией
 (2.34) (2.34)
если же входной величиной является угол поворота, то тахогенератор представляет собой реальное дифференцирующее звено:
 (2.35) (2.35)
Основные преимущества ТГ постоянного тока заключаются в отсутствии фазовых погрешностей и высокой чувствительности. Крутизна выходной характеристики современных ТГ постоянного тока 3–100 мВ/(об/мин) (меньшие значения относятся к тахогенераторам с постоянными магнитами). В зависимости от класса точности тахогенератора скоростная амплитудная погрешность при номинальной частоте вращения составляет ±(0,5–3)%. К недостаткам тахогенератора относятся сложность конструкции, высокая стоимость, низкая надежность, нестабильность выходной характеристики из-за наличия скользящего контакта; пульсации выходного напряжения и радиопомехи, возникающие в результате коммутации тока. Как видим, все недостатки ТГ постоянного тока связаны с наличием щеточного контакта.
Асинхронный тахогенератор. Имеет полый немагнитный ротор и две обмотки на статоре, сдвинутые в пространстве на 90°. Такую же конструкцию имеет двухфазного асинхронного исполнительного двигателя с полым ротором. Одна из обмоток В (возбуждения) постоянно включена в сеть (рис. 2.22), другая обмотка Г (генераторная) присоединена к нагрузке Zн , т. е. является выходной. Полый ротор выполняется из высокоомных материалов (константана, манганина и др.), сопротивление которых мало изменяется под влиянием температуры.
Обмотка возбуждения создает пульсирующий магнитный поток, направленный по продольной оси машины. При неподвижном роторе этот магнитный поток будет наводить трансформаторную ЭДС Ет в полом роторе как во вторичной обмотке трансформатора. Полый ротор можно считать состоящим из элементарных проводников, замкнутых накоротко на торцах. Контуры токов, обусловленных трансформаторной ЭДС, располагаются в плоскостях, перпендикулярных продольной оси машины (на рис. 2.22 условно показаны внутри ротора). Эти токи создают магнитный поток, направленный, согласно правилу Ленца, навстречу магнитному потоку обмотки возбуждения. Теоретически в результате взаимодействия магнитных потоков при неподвижном роторе (ω = 0) в тахогенераторе создается магнитный поток Фв, направленный по продольной оси, поэтому в генераторной обмотке, расположенной по поперечной оси, ЭДС наводиться не будет (Uвых = 0). На самом деле из-за несимметрии магнитной цепи, несимметрии полого ротора, а также неточности сдвига обмоток в пространстве на выходе тахогенератора имеется небольшое напряжение, называемое остаточным.
При вращении ротора (ω ≠ 0) ввиду его симметрии процесс наведения трансформаторной ЭДС не изменится, и магнитный поток Фв будет по-прежнему существовать. Стало быть, проводники ротора вращаются в поле Фв, и в них наводится ЭДС вращения (на рис. 2.22 условно показана с внешней стороны ротора). Величина ЭДС вращения
Евр = k1ωФв, (2.36)
где k1 – коэффициент, зависящий от конструктивных параметров тахогенератора.
Под действием ЭДС вращения по ротору протекает ток Iвр, контуры которого при большом активном сопротивлении ротора располагаются в плоскостях, параллельных продольной оси. Эти токи создают магнитный поток Фвр, направленный по поперечной оси, т.е. по оси генераторной обмотки.
Так как ток Iвр пропорциональны ЭДС Евр, то и магнитный поток Фвр пропорционален частоте вращения ротора ω:
Фвр = k2 ω. ( 2.37)
Частота пульсации потока Фвр совпадает с частотой напряжения обмотки возбуждения ωв. Магнитный поток Фвр наводит в генераторной обмотке выходную ЭДС Евых, действующее значение которой определяется уравнением
Евых = 4,44 fwг.эфФвр.m, (2.38)
где wг.эф – эффективное число витков генераторной обмотки; Фвр.m – амплитудное значение потока по поперечной оси.
Так как Фвр пропорционально ω, то и Евых пропорционально ω. Частота выходной ЭДС равна частоте напряжения возбуждения и не зависит от частоты вращения ротора.
Приведенные рассуждения справедливы при независимости потока Фв от частоты вращения ротора. В действительности магнитный поток Фв с ростом частоты вращения уменьшается. Это объясняется размагничивающим действием токов ротора. Если замкнуть обмотку Г на нагрузочное сопротивление Zн, то по ней потечет ток Iг. Поток Фвр будет создаваться геометрической суммой МДС ротора и обмотки статора Г, что скажется на амплитуде ЭДС Евых. Кроме того, само выходное напряжение Uвых будет меньше чем Евых так как представляет собой геометрическую разность ЭДС Евых и падения напряжения на собственном сопротивлении обмотки Zг:
Úвых = Éг – ÍгZг. (2.39)
Статические характеристики асинхронного ТГ приведены на рис. 2.23. Частота вращения ротора представлена в относительных единицах: ν = ω/ωв.
Типичные параметры АТГ:
полная погрешность при максимальной рабочей скорости 0,1–2,5%;
крутизна выходной характеристики 1–10 мВ/(об/мин);
величина остаточной ЭДС 25–100 мВ.
Для уменьшения скоростных погрешностей выбирают тахогенераторы с такой синхронной частотой вращения, при которой значение относительной частоты вращения ротора не превышает 0,3, так как выходная характеристика на участке ν = 0 – 0,3 практически линейна.
Уравнение динамики без учета нагрузки имеет вид:
 (2.40) (2.40)
Если за входную величину принята частота вращения ротора, тахогенератор представляет собой безынерционное звено с передаточной функцией W(p) = k. Если же за входную величину принят угол поворота ротора, то тахогенератор представляет собой идеальное дифференцирующее звено с передаточной функцией W(p) = kр.
Асинхронный тахогенератор используется, например, в авторулевом в качестве дифференцирующего звена, входной величиной которого является угол отклонения судна от заданного курса.
Задание 2
Максимальный селектор (выходной сигнал постоянного тока пропорционален амплитуде большего из входных синусоидальных сигналов)
Амплитудные селекторы.
Амплитудные селекторы предназначены для выделения импульсных сигналов, амплитуда которых превышает заданный уровень (селекторы максимальной амплитуды), нс превышает заданного уровня (селекторы минимальной амплитуды) или амплитуда которых находится в заданных интервалах (интервальные амплитудные селекторы). Существуют еще селекторы полярности импульсов, главное назначение которых — выделение импульсов положительной или отрицательной полярности. Последний класс селекторов можно считать частным случаем селекторов максимальной или минимальной амплитуды, когда порог равен нулю. Амплитудный селекгор в общем случае можно представить как нелинейный четырехполюсник.
Наиболее просто реализуются селекторы полярности импульсов на базе полупроводниковых диодов (рис. 7.9). Принцип действия селектора основан на вентильном действии диода Dx. При u(t) > 0 диод D, открыт, и полярность нвых(0 на сопротивлении нагрузки RH будет равна
где R, RxR2/ (R + R2). Конденсатор С, предназначен для развязки входной и выходной цепи селектора по постоянному току, а резистор /?, — для обеспечения приближенного равенства времени заряда и разряда цепи. При этом R2 и Ru выбирают из условия Rx « /?обр; RH » /?пр, где /?,, и /?обр — прямое и обратное сопротивления диода. Для выделения импульсов отрицательной полярности в схеме (рис. 7.9) необходимо изменить полярность ?>,.
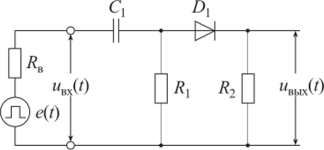
Рис. 7.9
Возможен диодный селектор импульсов положительной полярности и с параллельным включением диодов (рис. 7.10). При этом выходное напряжение определяется формулой
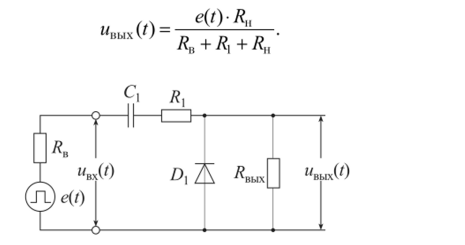
Рис. 7.10
Изменение полярности, позволяет выделить импульсы отрицательной полярности.
Селекторы полярности импульсов могут реализовываться и на базе биполярных или полевых транзисторов. На рис. 7.11 в качестве примера изображена схема селектора импульсов положительной полярности на базе биполярного р-п-р транзистора.
Селекторы максимальной амплитуды могут быть также реализованы на базе полупроводниковых диодов или транзисторов. На рис. 7.12 изображена одна из возможных схем подобного селектора на базе диода Dy Пороговое напряжение t/min здесь создается за счет внешнего источника эдс Ех и делителя /?, /Л3:
 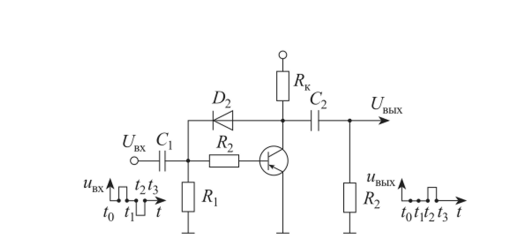
Рис. 7.11
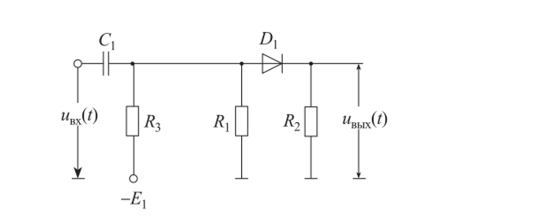
Рис. 7.12
Выходная характеристика селектора максимальной амплитуды имеет вид, изображенный на рис. 7.13.
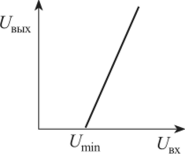
Рис. 7.13

Аналогичным образом можно реализовать амплитудный селектор максимальной амплитуды и на базе транзисторов (рис. 7.14). Данный селектор выделяет импульсы отрицательной полярности, амплитуда которых удовлетворяет условию
где Umm определяется (7.15).
Селектор минимальной амплитуды является более сложным устройством. На рис. 7.15 в качестве примера изображена одна из возможных схем селектора минимальной амплитуды, а на рис. 7.16 — временная диаграмма, поясняющая его работу. Выходные характеристики селектора минимальной амплитуды имеют вид, изображенный на рис. 7.17.
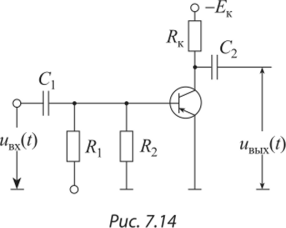 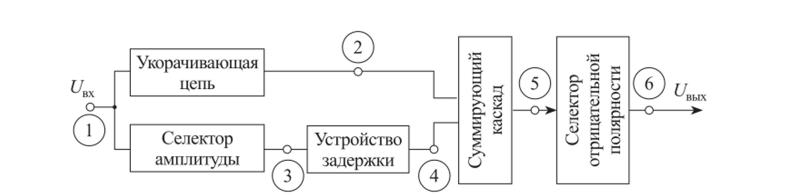
Рис. 7.15
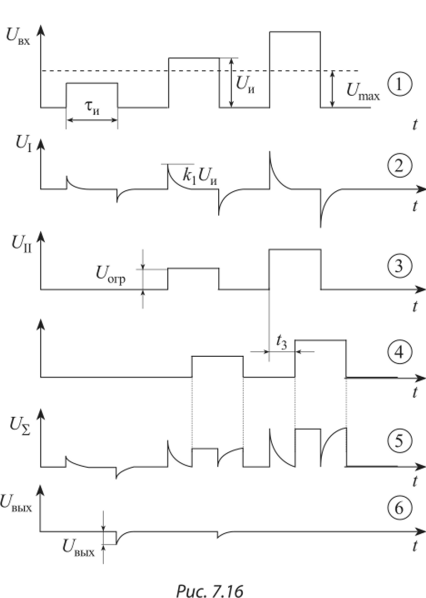 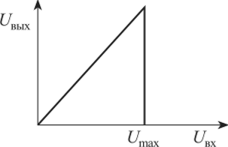
Рис. 7.17
Интервальные амплитудные селекторы пропускают только импульсы, удовлетворяющие условию
и < и < и
Идеальные выходные характеристики такого селектора имеют вид, изображенный на рис. 7.18.
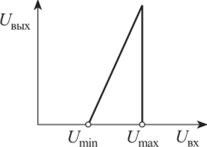
Рис. 7.18
На рис. 7.19 изображена структурная схема интервального селектора. Как следует из этого рисунка, интервальный селектор отличается от селектора минимальной амплитуды только наличием в канале укороченного импульса селектора максимальной амплитуды, который пропускает только импульсы, амплитуда которых удовлетворяет условию U„ > Un.
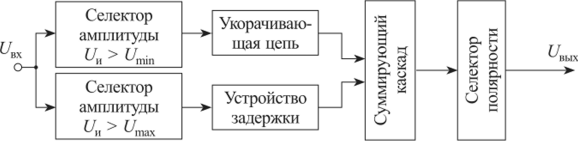
Рис. 7.19 |
|
|
 Скачать 0.53 Mb.
Скачать 0.53 Mb.