привод передвижения тележки мостового крана. барышников. Филиал государственного образовательного учреждения высшего образования
 Скачать 3.26 Mb. Скачать 3.26 Mb.
|

/МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ____________________ ______________________________________ Филиал ГОСУДАРСТВЕННОГО ОБРАЗОВАТЕЛЬНОГО УЧРЕЖДЕНИЯ ВЫСШЕГО ОБРАЗОВАНИЯ «МОСКОВСКИЙ ЭНЕРГЕТИЧЕСКИЙ ИНСТИТУТ (ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ)» в г. Смоленске Кафедра: Электромеханические системы К У Р С О В А Я Р А Б О Т А ПОЯСНИТЕЛЬНАЯЗАПИСКА ТЕМА: ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПЕРЕДВЕЖЕНИЯ ТЕЛЕЖКИ МОСТОВОГО КРАНА ________________________ (условное обозначение) Группа ЭП-19 СтудентСавельев А.Е. (подпись) (Фамилия И. О.) Руководитель проекта_________________________________________Барышников В.А. (уч. звание, должность) (подпись) (Фамилия И. О.) “________” _____________________ 2022 год Смоленск 2022 г АННОТАЦИЯ Савельев А.Е. Электропривод механизма передвижения тележки мостового крана./ Курсовая работа – 2022г. – стр.38, рис.15. Произведены расчеты и построены нагрузочные диаграммы производственного механизма и выбранного двигателя; рассчитаны и выбраны силовые элементы. Исследованы статические и динамические свойства системы и рассчитаны энергетические показатели за цикл работы привода. Приведены модели контуров регулирования привода (контур тока и контур скорости). СОДЕРЖАНИЕ АННОТАЦИЯ 2 ВВЕДЕНИЕ 4 1. Расчет и построение нагрузочной диаграммы производственного механизма, предварительный выбор электродвигателя 6 2. Расчет и построение нагрузочной диаграммы двигателя, проверка двигателя по условиям нагрева и допустимой перегрузки 8 3. Выбор схемы и расчет параметров силового преобразователя 11 4. Расчет и построение статических характеристик электропривода в разомкнутой системе 17 5. Расчет и построение статических характеристик электропривода при автоматическом регулировании координат с учетом предъявляемых требований 20 6. Расчет переходных процессов и построение уточненной нагрузочной диаграммы электропривода за цикл работы путем математического моделирования. Анализ результатов 26 7. Окончательная проверка двигателя по уточненной нагрузочной диаграмме и определение интегральных энергетических показателей электропривода за цикл работы 28 ЗАКЛЮЧЕНИЕ 31 Список используемой литературы: 32 ВВЕДЕНИЕ Электрическим приводом (в дальнейшем – ЭП) называется электромеханическое устройство, предназначенное для приведения в движение рабочих органов машин и управления их технологическими процессами, состоящее из передаточного устройства, электродвигательного устройства, преобразовательного устройства и управляющего устройства. Передаточное устройство содержит механические передачи и соединительные муфты, необходимые для передачи вырабатываемой двигателем механической энергии исполнительному механизму. Преобразовательное устройство предназначается для управления потоком электрической энергии, поступающим из сети с целью регулирования режимов работы двигателя и механизма. Оно представляет собой энергетическую исполнительную часть системы управления электроприводом. Управляющее устройство представляет собой информационную слаботочную часть системы управления, предназначенную для фиксации и обработки поступающей информации о задающих воздействиях и состоянии системы и выработки на ее основе сигналов управления преобразовательным, электродвигательным и другими устройствами. Автоматизированный электропривод в настоящее время получил широчайшее применение во всех сферах жизни и деятельности. Такое распространение электропривод получил благодаря таким его особенностям, как экономичность, низкая стоимость, широкий диапазон мощностей, компактность, сравнительная простота реализации, относительная простота управления и контроля над технологическим процессом и др., совершенствование технических показателей. Соответственно, совершенствование технических показателей электроприводов во всех областях применения является основой технического прогресса. В настоящее время существует множество различных систем управления приводами. Это система электропривода с асинхронными фазными двигателями и торможением противовключением, электроприводы с импульсно-ключевыми коммутаторами в цепи ротора асинхронных фазных электродвигателей, крановые электроприводы с тиристорными преобразователями напряжения в цепи статора асинхронного двигателя, системы управления двигателями постоянного тока, реализованные на основе управляемых выпрямителей, либо импульсных модуляторов и т. д. Управление электроприводами реализуется, как правило, на основе преобразовательного устройства. Целью данного курсового проекта является разработка электропривода повторно-кратковременного режима по системе «тиристорный преобразователь – двигатель постоянного тока». В выпускной работе охватываются такие вопросы, как выбор схемы электропривода, разработка системы управления электроприводом, анализ динамических свойств замкнутой и разомкнутой системы, расчет энергетических показателей электропривода. Расчет и построение нагрузочной диаграммы производственного механизма, предварительный выбор электродвигателя 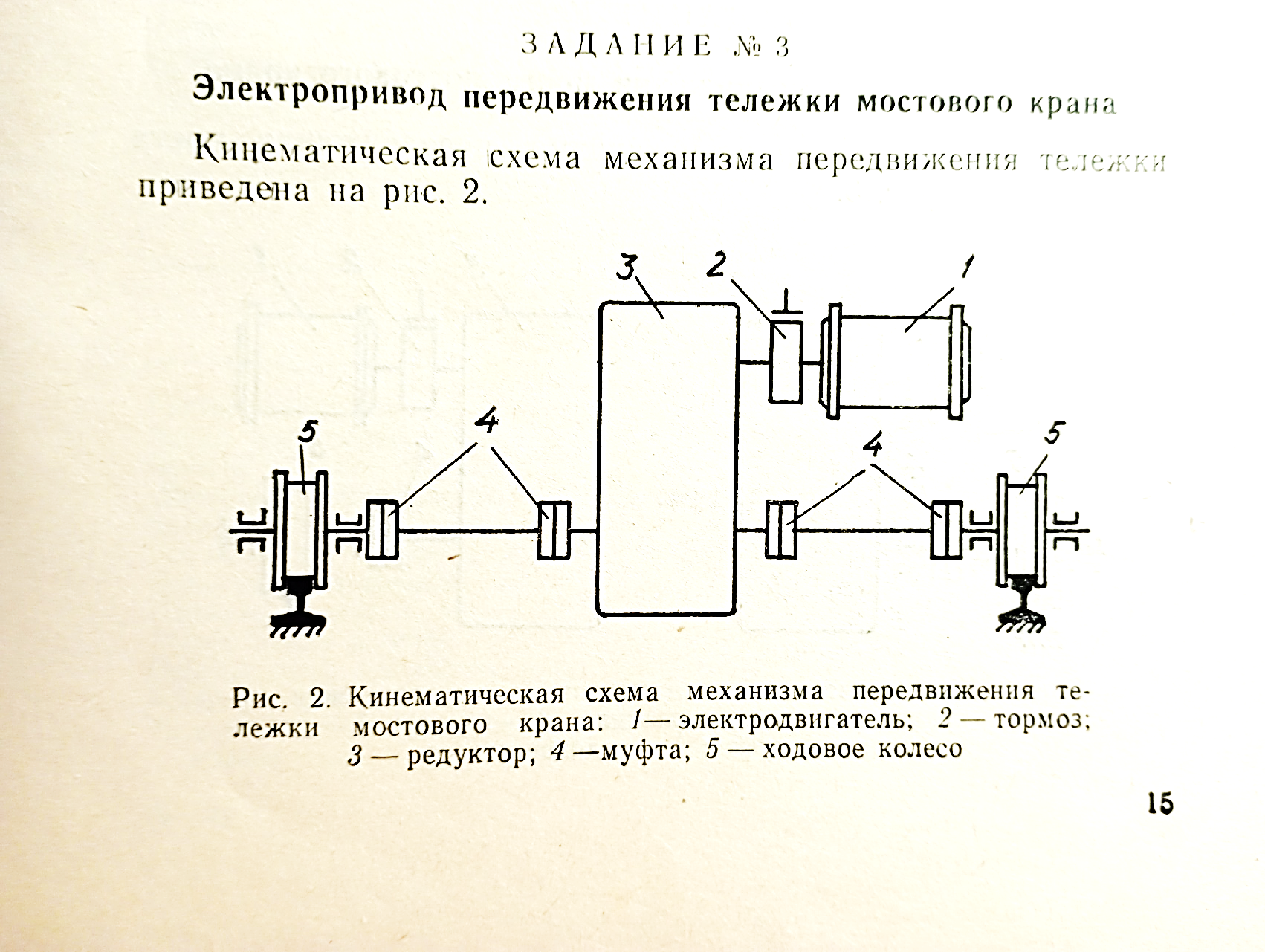 Рис.1 – Кинематическая схема Технические данные: Грузоподъемность крана mгр – 15 т; Масса тележки mмех - 4,8 т; Масса грузозахватывающего приспособления mг – 0,2 т Длинна пролета моста lмоста –25 м; Скорость передвижения тележки 𝑉т - 0.653 м/с; Пониженная скорость Vпон – 0.163 м/с Ускорение 𝑎 – 0,2 м/с2; Диаметр ходового колеса – 0.3 м; Диаметр цапфы ходового колеса – 0,07 м; Передаточное число редуктора 𝑖ред – 31,2; КПД: а) при полной загрузке 𝜂1=0,92; б) с пустым крюком 𝜂2 =0,68. Режим работы ПВ – 40 %. Необходимое усилие для перемещения тележки с грузом:   Статистический момент с грузом:  Усилие для передвижения тележки без груза:   Статистический момент без груза:  Время работы с грузом и без груза одинаково:  Учитывая продолжительность ПВ, найдем время цикла:  Принимаем двигатель положительного номинального режима S1. Тогда эквивалентный момент за цикл равен:  Расчетная скорость двигателя:   Расчетная мощность двигателя:  где kз – коэффициент запаса, приблизительно учитывающий динамические моменты (1.2) По расчетным данным выбираем двигатель 4ПБМ160LО4 с паспортными данными: Номинальная мощность: Pн = 3.75 кВт; Номинальное напряжение: Uн = 220 В; Номинальная линейная скорость вращения: nном = 1000 об/мин; Максимальная линейная скорость вращения: nмакс = 3000 об/мин; Сопротивление обмотки якоря при 15 0С: Rя = 0,67Ом; Сопротивление обмотки добавочных полюсов при 15 0С: Rдп = 0,445Ом; Сопротивление обмотки возбуждения при 15 0С: Rв = 76 Ом; Индуктивность цепи якоря: Lя = 14 мГн; Момент инерции: Jдв = 0,042 кг  ; ;Номинальная скорость и номинальный момент выбранного двигателя:   Максимальный момент двигателя:  Нагрузочная диаграмма производственного механизма представлена на рисунке 1. 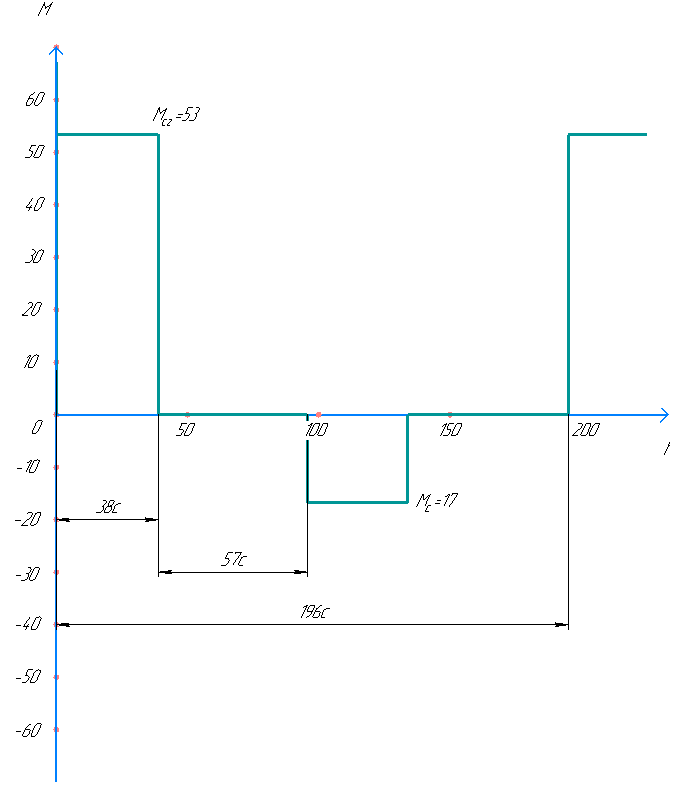 Рисунок 1 – Нагрузочная диаграмма производственного механизма Расчет и построение нагрузочной диаграммы двигателя, проверка двигателя по условиям нагрева и допустимой перегрузки Суммарный приведенный момент инерции при движении с грузом:  Момент инерции неучтенных вращающихся частей принят равным 20% от Jдв. Суммарный приведенный момент инерции при движении без груза:  Динамический момент при движении с грузом равен:  Динамический момент при движении без груза равен:  Время и путь разгона привода с грузом: -от нуля до пониженной скорости   -от пониженной скорости до номинальной:   Принимаем время работы на пониженной скорости t3=2c и тогда пройденный путь:  При торможении привода времена и пути такие же как при разгоне. Весь путь пройденный за половину времени цикла: Lмоста=2∙(s1+s2+s3)+s4  Время рабоыт на номинальной скорости:  Новое время работы:  Новое время цикла:  Время паузы:  По нагрузочной диаграмме двигателя найдем эквивалентный момент:   Эквивалентный момент двигателя и проверка:  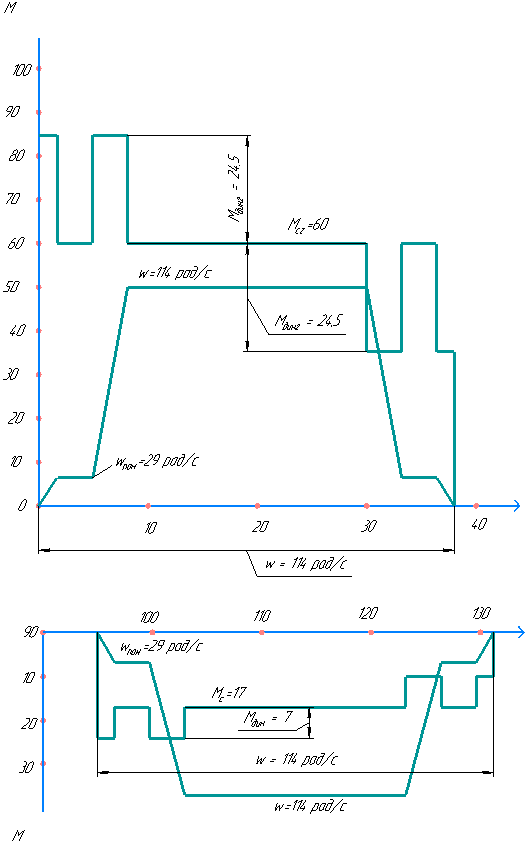 Рисунок 3 – Нагрузочная диаграмма двигателя Максимальный момент по нагрузочной диаграмме и проверка:   Таким образом, выбранный двигатель подходит по условиям перегрузки. Выбор схемы и расчет параметров силового преобразователя По заданию на курсовую работу нужно разработать электропривод постоянного тока по системе ТП-Д. Схема тиристорного преобразователя для двигателя постоянного тока представлена на рисунке 3. В схему входит силовой трансформатор, реверсивный тиристорный преобразователь из 12 тиристоров, уравнительные дроссели, сглаживающий дроссель (не обязателен), двигатель постоянного тока. 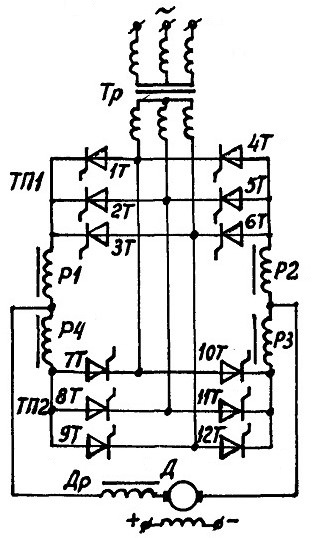 Рисунок 3 – Схема тиристорного преобразователя Расчет силового трансформатора Преобразователь подключается к сети, как правило, через трансформатор. Силовой трансформатор необходим для согласования напряжения питающей сети с напряжением двигателя и для обеспечения нулевого вывода в трехфазной нулевой схеме. Мощность трансформатора зависит от схем преобразователя и соединения его обмоток. Исходными данными для расчета трансформатора являются напряжение, ток нагрузки и предварительно выбранная схема преобра-зователя. Выбор силового трансформатора производится по расчетным значениям токов I1 и I2, напряжению U2 и типовой мощности Sтр. Расчетное значение напряжения U2ф вторичной обмотки трансформатора, имеющего m-фазный ТП с нагрузкой на якорь двигателя в зоне непрерывных токов, с учетом необходимого запаса на падение напряжения в силовой части, определяется формулой:  В, В,где ku=0,461 – коэффициент, характеризующий отношение напряжений U2ф/Ud0 в реальном выпрямителе; kc=1,1 – коэффициент запаса по напряжению, учитывающий возможное снижение напряжения сети; k=1,05 – коэффициент запаса, учитывающий неполное открытие вентилей при максимальном управляющем сигнале; kR=1,05 – коэффициент запаса по напряжению, учитывающий падение напряжения в обмотках трансформатора, в вентилях и за счет перекрытия анодов; Ud=220 В – номинальное напряжение двигателя. Расчетное значение тока вторичной обмотки:  А, А,где kI=0,815 – коэффициент схемы, характеризующий отношение токов I2ф/Id в идеальной схеме; ki=1,05 – коэффициент, учитывающий отклонение формы анодного тока вентилей от прямоугольной; Id – значение номинального тока двигателя.  А АРасчетная типовая мощность силового трансформатора:  кВА, кВА,где ks=1,05 – коэффициент схемы, характеризующий отношение мощностей Sтр/UdId для идеального выпрямителя с нагрузкой на противо-ЭДС. Выбираем силовой трансформатор, удовлетворяющий условиям: Sн5.95 кВА; U2фн122,997 В; I2фн23,35 А. Выбираем трансформатор ТС-6,3-220/127. Его характеристики: Sн=6,3 кВА; U1нл=2205% В; U2нл=127 В; Рк=250 Вт; Uк=3,8% Y/Y0- Коэффициент трансформации:  Расчетное значение тока первичной обмотки:  А. А.Выбор тиристоров.Среднее значение тока тиристора:  А, А,где kзi=2,5 – коэффициент запаса по току; kох – коэффициент, учитывающий интенсивность охлаждения силового вентиля. При естественном охлаждении kох=0,35; mтр=3 – число фаз трансформатора. Максимальная величина обратного напряжения:  В, В,где kзн=1,8 – коэффициент запаса по напряжению, учитывающий возможные повышения напряжения питающей сети (включая режим холостого хода) и периодические выбросы Uобр, обусловленные процессом коммутации вентилей; kUобр=1,065 – коэффициент обратного напряжения, равный соотношению напряжений UBmax/Ud0 для мостовой реверсивной схемы выпрямления; Ud0 – напряжение преобразователя при =0:  В ВИз справочника [3] выбираем тиристор серии «Т132-50-6», средний ток тиристора: 50 А Выбор индуктивности дросселей.Под действием неуравновешенного напряжения, минуя цепь нагрузки, может протекать уравнительный ток, который создает потери в вентилях и обмотках трансформатора и может приводить к аварийному отключению установки. Требуемая величина индуктивности уравнительных дросселей, исходя из ограничения амплитуды переменной составляющей уравнительного тока до величины, не превышающей 10%:  , ,где U1п – удвоенное эффективное значение первой гармоники выпрямленного напряжения;  В, В,где Uп/Ud0=0.26 – определено по рисунку из [2] для m=6 и =900; m=6 – число фаз выпрямления;  Гн. Гн.При применении не насыщающихся дросселей: Lуд=0.5Lуд.расч=0.044 Гн. Выбираем дроссель серии СРОС-200/0.5У4 с Lуд=0.06 Гн. Рассчитаем индуктивность сглаживающего дросселя:  Гн, Гн,где Uп=Udo*0,26=152.739 В – действующее значение первой гармоники выпрямленного напряжения. Необходимая величина индуктивности сглаживающего дросселя: Lсд=Lнеобх-(Lдв+2Lтр+Lуд), где Lдв – индуктивность якоря и дополнительных полюсов двигателя:  Гн; Гн;Lтр – индуктивность фазы трансформатора, приведенная к контуру двигателя; 2  мГн; мГн;Lсд=0.044-(0.013+2*0.761+0.06)=-31 мГн. Т.к. Lсд0, то сглаживающий дроссель не требуется. 3.4. Определение расчетных параметров силовой цепи ТП-Д.Расчетное сопротивление цепи выпрямленного тока:  , ,где k=1+(tн-t)=1+0.004(90-15)=1.3; =0,004 – температурный коэффициент сопротивления меди; tн=900 – рабочая температура для класса изоляции В; t=150 – температура окружающей среды; Rщ – сопротивление щеточного контакта:  мОм; мОм;Rп – сопротивление преобразователя:  , ,где Rт – активное сопротивление обмоток трансформатора:  Ом; Ом;хт – индуктивное сопротивление обмоток трансформатора:  Ом; Ом;Rуд – активное сопротивление уравнительных дросселей:  Ом. Ом.Таким образом,  Ом; Ом; Ом. Ом.Расчет и построение статических характеристик в разомкнутой системе.Статические характеристики в разомкнутой системе могут быть построены по следующим выражениям:  где Rя.дв – сопротивление якорной цепи двигателя с учетом нагрева:  Ом ОмТок возбуждения двигателя:  А АНоминальный ток якоря:  А АСтатические скорость и момент: wс=104 1/с; Мсг =53 Нм; Мс=17.4 Нм. Из уравнений для статических характеристик:  В/с В/сЭДС преобразователя при с и Мсг:  ЭДС преобразователя при с и Мс:  Уравнение статической механической характеристики при Еп.необх1:  ; ; . .Уравнение статической механической характеристики при Еп.необх2:  ; ; . .Максимальная ЭДС преобразователя при =0:  В. В.Уравнение статической характеристики при Еп.max:  ; ; . .Статическая характеристика при Еп=0:  ; ; . .Естественная статическая характеристика:  ; ; . .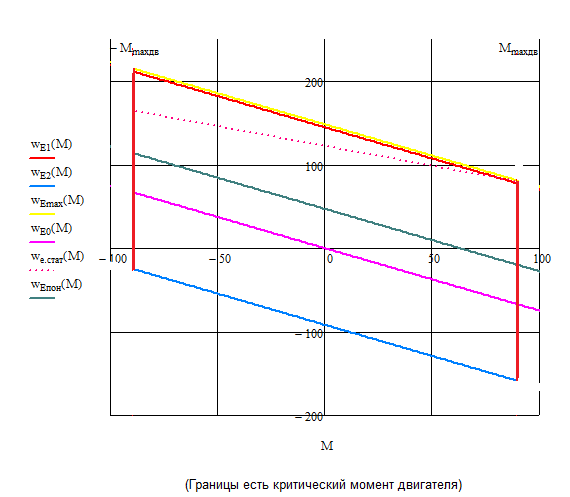 Рисунок 4 – Статические характеристики разомкнутой системы. Выбор структуры замкнутой системы электропривода, расчет ее параметров При выборе САР по системе ТП-Д особое внимание следует уделить требованиям, предъявляемым к системе. Система должна быть экономична, должна обеспечивать нужный диапазон регулирования координат, а так же быть простой и способной решать высокий круг задач. Поэтому в данной работе мы выбираем систему ТП-Д с подчиненным регулированием координат с настройкой на технический оптимум. При настройке подчиненного регулирования пренебрегаем влиянием обратной связи по ЭДС. Влияние обратной связи по ЭДС: Медленно меняющееся возмущение; Незначительно влияет на динамику; Вносит незначительную статическую ошибку. 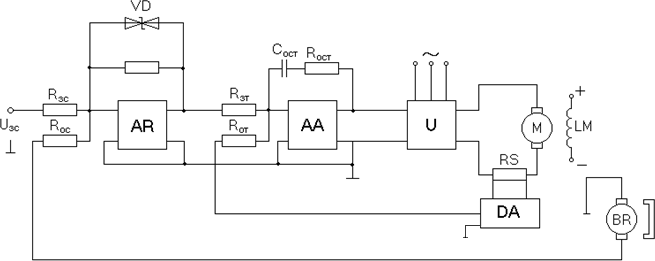 Рис.5 – Принципиальная схема подчиненного регулирования тока и скорости в системе ТП-Д Рассчитаем постоянные времени электропривода: Электромагнитная постоянная цепи якоря:  Электромеханическая постоянная электропривода:   Расчет контура тока 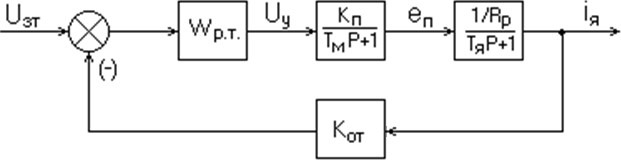 Рисунок 9 – Структурная схема регулирования тока. Отнесем время запаздывания тиристорного преобразователя п и инерционность фильтров Тф к некомпенсированным постоянным времени, т.е. Т=п+ Тф=0,01 с. Тогда, если не учитывать внутреннюю обратную связь по ЭДС двигателя, можно записать передаточную функцию объекта регулирования тока:  , ,где kп – коэффициент усиления преобразователя. Желаемая передаточная функция прямого канала разомкнутого контура при настройке на технический оптимум:  , ,где ат=Тот/Т - соотношение постоянных времени контура. Отношение Wраз.т к Wорт есть передаточная функция регулятора тока:  , ,где Тит – постоянная интегрирования регулятора тока:  Из выражения для Wрт видно, что необходим ПИ-регулятор тока. Коэффициент усиления пропорциональной части: kу=Тя/Ти или kу=Rост/Rот Коэффициент обратной связи по току:  , ,где kш – коэффициент передачи шунта; kу – коэффициент усиления датчика тока.  Стопорный момент:   Стопорный ток:  А; А;Шунт выбираем с условием IшнIяmax(20А). Выбираем шунт типа 75ШИП1-25-0,5. Его параметры: Iшн=25 А Uшн=75 мВ Коэффициент передачи датчика тока:  Коэффициент усиления преобразователя:  Так как Rот=Rзт, тогда  Постоянная интегрирования ПИ-регулятора:   МОм МОмКоэффициент усиления регулятора:  Постоянная времени ПИ-регулятора: Тит=RзтСост Компенсируемая постоянная времени регулятора:  Отсюда,  кОм, кОм,где Тя=Тэ – электромагнитная постоянная времени. Сопротивление обратной связи:  Мом Мом5.2. Расчет контура скорости 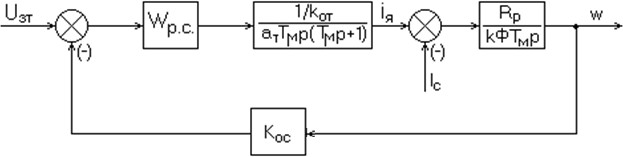 Рисунок 12 – Структурная схема контура скорости. Объект регулирования скорости состоит из замкнутого контура регулирования тока и механического звена электропривода и имеет вид  . .Некомпенсированная постоянная времени для контура скорости в ат раз больше, чем для контура тока:  с. с.Желаемая передаточная функция разомкнутого контура:  , ,где ас=Тос/Тс – соотношение постоянных времени. ас=2 в настроенном на технический оптимум контуре. Передаточная функция регулятора скорости (Wраз.с/Wорс):  . .Очевидно, что необходимо применить пропорциональный регулятор скорости (П-регулятор) Коэффициент задания момента:  Его коэффициент усиления kус=Wр.с. В замкнутой системе с и Мс связаны соотношением:  Коэффициент обратной связи по скорости:  В В с сКоэффициент усиления П-регулятора  . .Максимальная скорость холостого хода:  Зададимся Rосс=100 кОм, тогда:  Ом ОмДопустим, используется тахогенератор с kтг=0,32 Вс. Тогда при 0=0з.max максимальная ЭДС тахогенератора:  В. В.Сопротивление в цепи обратной связи по скорости:  кОм. кОм.3) Расчет и построение статистических в замкнутой системе:   При М = Мстоп =89,2 скорость равна: 1/с. 1/с.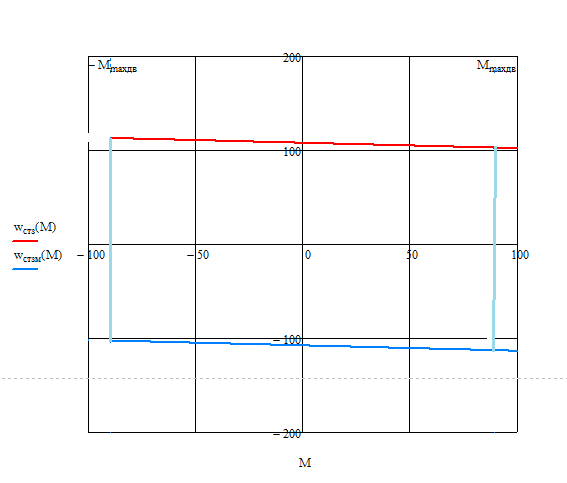 Рисунок 12 – Статические механические характеристики замкнутой системы Расчет переходных процессов и построение уточненной нагрузочной диаграммы электропривода за цикл работы путем математического моделирования. Анализ результатов. Для построения переходных процессов электропривода в замкнутой системе с подчиненным регулированием координат, используем программу MATLAB/Simulink. Для начала введем схему контура тока, представленную на рис.9. 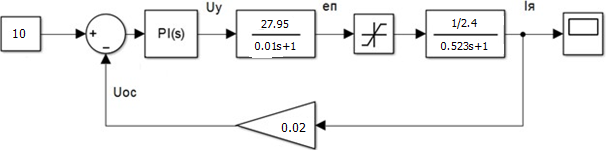 Рис.9 – Структурная схема контура тока Зависимость 𝐼я = 𝑓(𝑡) показана на рис.10 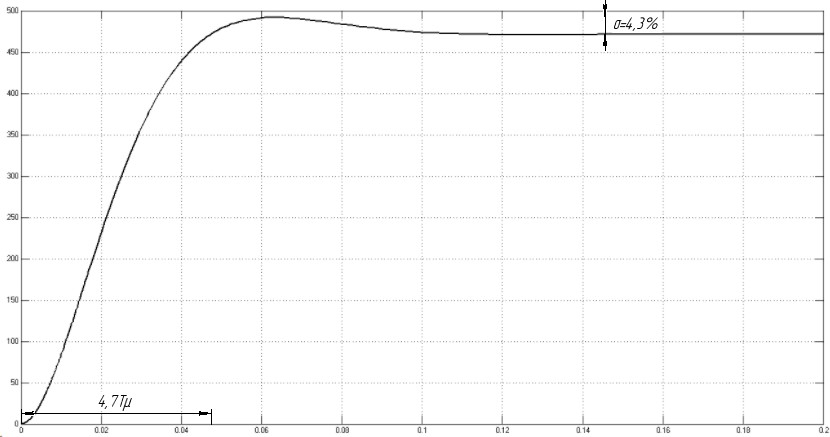 Рис.10 – Зависимость 𝐼я = 𝑓(𝑡) Исходя из графика видно, что контур тока настроен правильно. Введем структурную схему системы ТП-Д, представленную на рис.11.  Рис.11 – Структурная схема системы ТП-Д а) 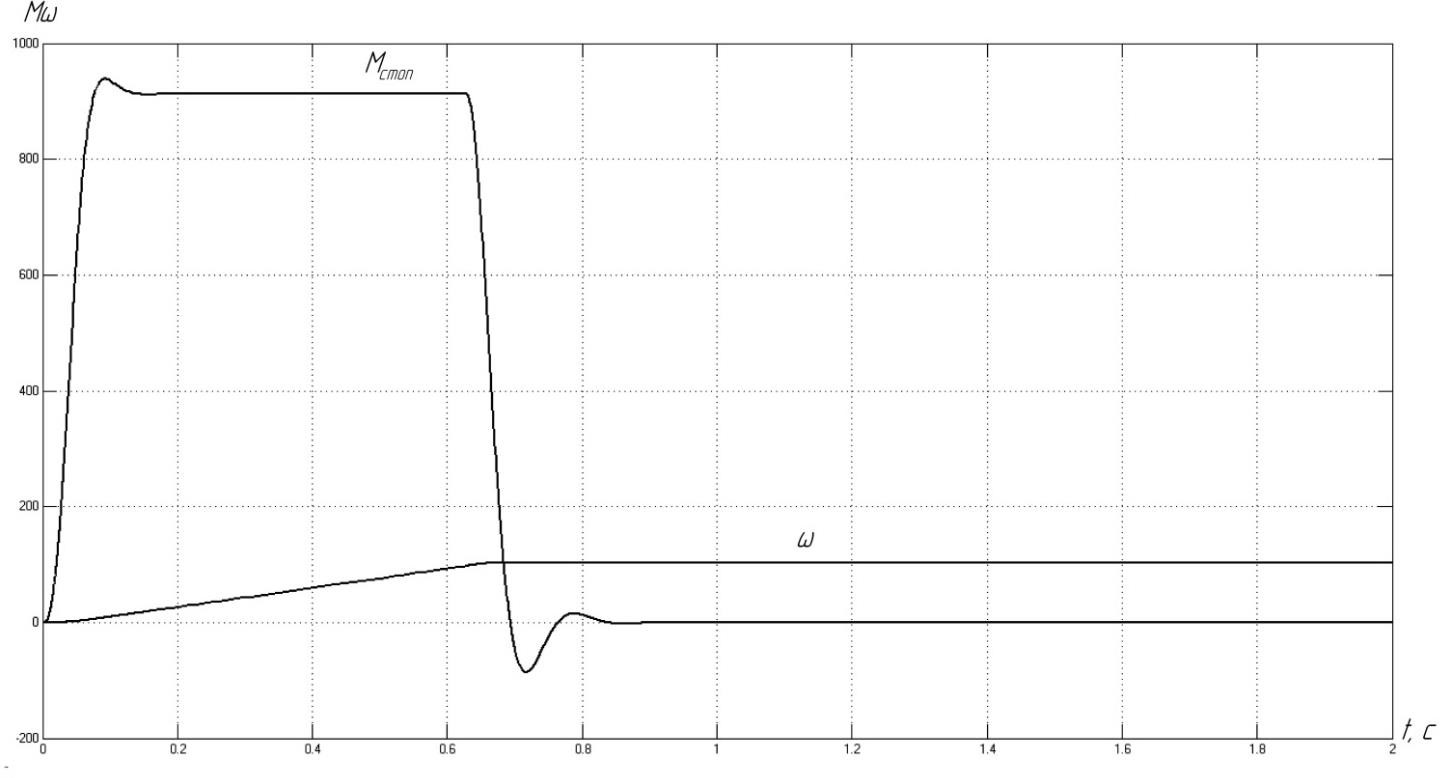 б) 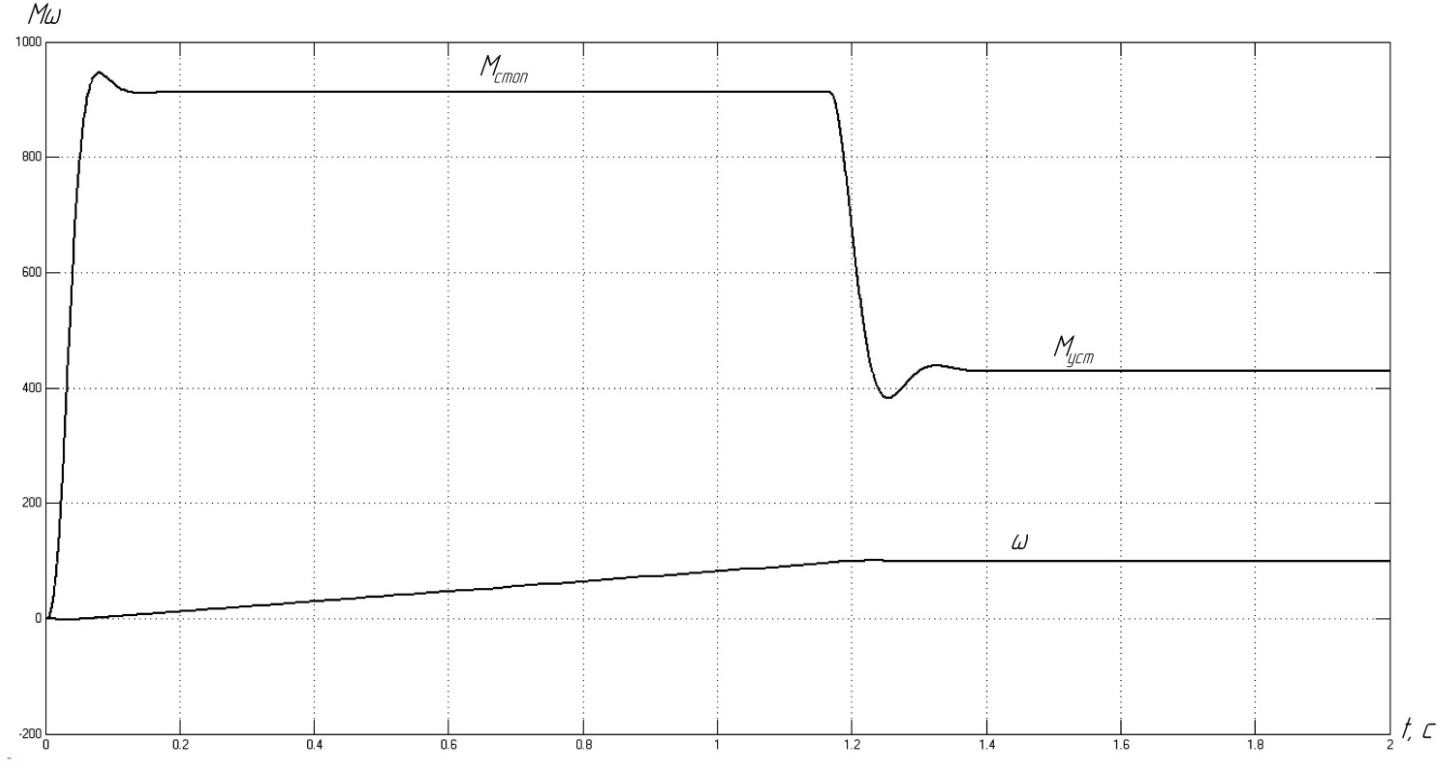 Рис.12 – Переходные процессы при пуске двигателя вхолостую (а) на номинальной нагрузке (б) Для построения уточненной нагрузочной диаграммы введем схему, представленную на рис.13. 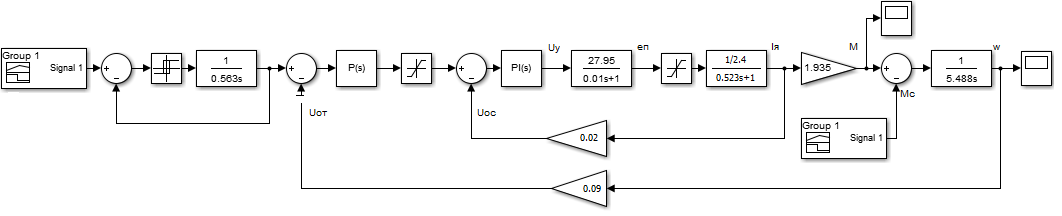 Рис.13 – Структурная схема системы ТП-Д 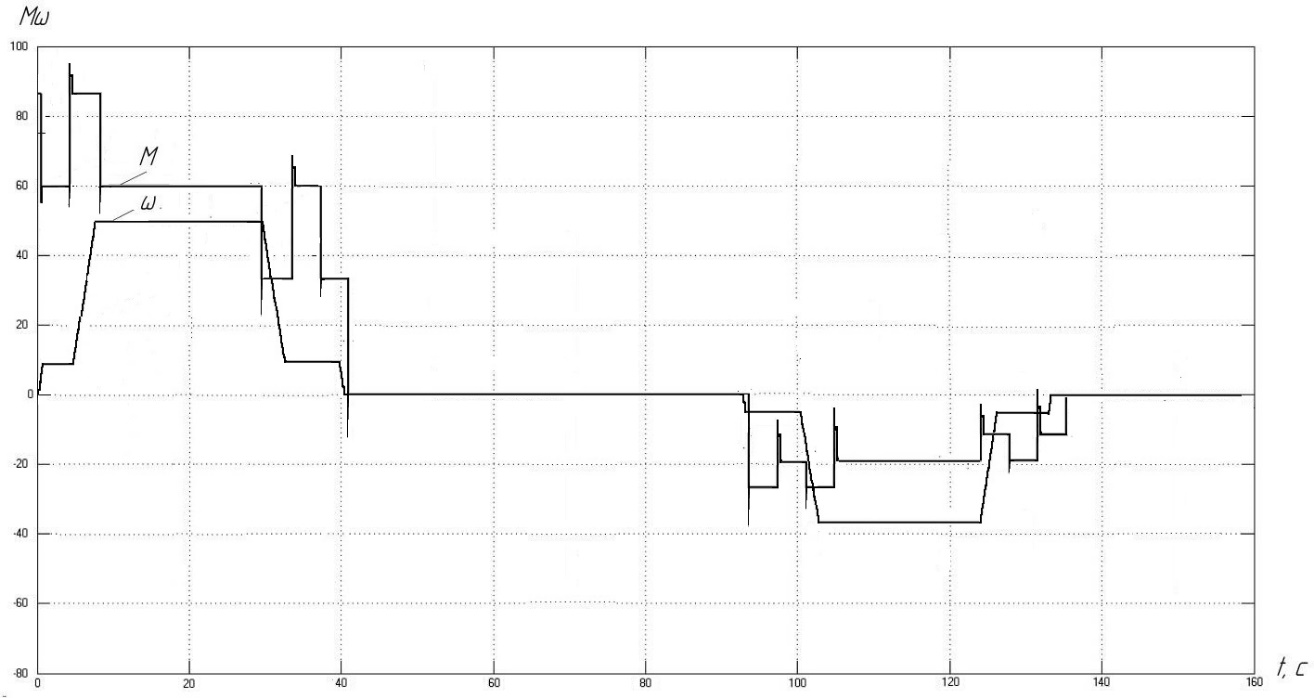 Рис.14 – Уточненная нагрузочная диаграмма за цикл работы Окончательная проверка двигателя по уточненной нагрузочной диаграмме и определение интегральных энергетических показателей электропривода за цикл работы. Уточненное значение  может быть определено путем нахождения площади ограниченной графиком может быть определено путем нахождения площади ограниченной графиком  , построенного на основе уточненной нагрузочной диаграммы. , построенного на основе уточненной нагрузочной диаграммы. Для данного расчета используем программу MATLAB/Simulink. Для моделирования введем схему, представленную на рисунке 14. 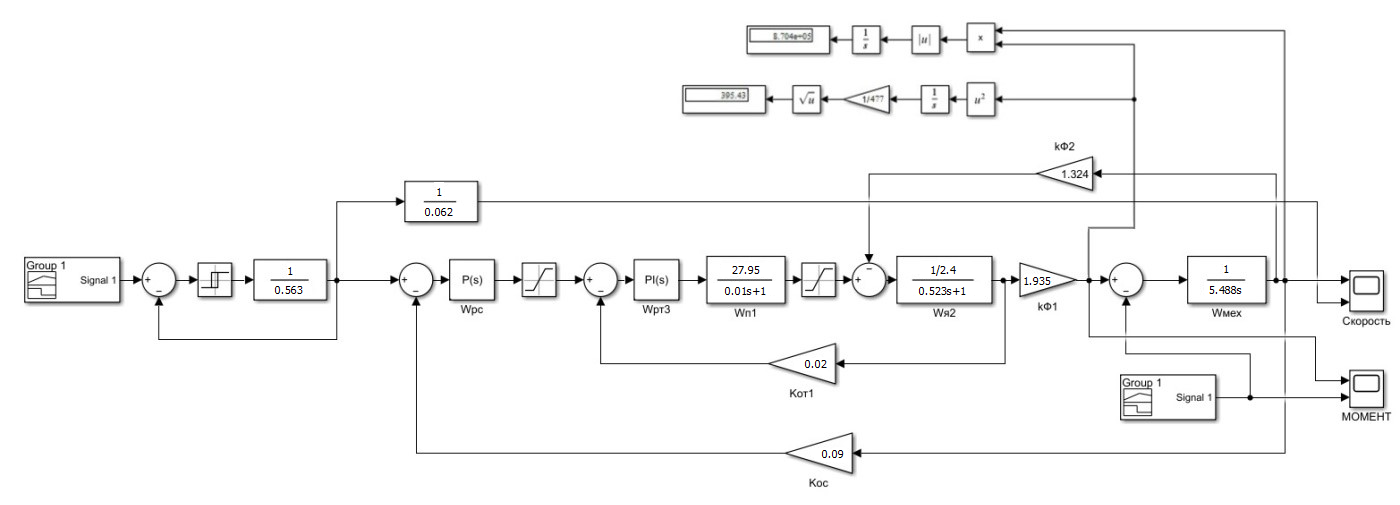 Рисунок 15 – Структурная схема для расчета и  По данным блока Display,  Проверим двигатель по условиям нагрева и допустимой перегрузки:  Выбранный двигатель удовлетворяет данным условиям Расчет интегральных энергетических показателей электропривода за цикл работы. Полезная работа совершенная ЭП за производственный цикл, можно определить путем нахождения площади, ограниченной графиком зависимости   Для данного расчета используем программу MATLAB/Simulink. Для моделирования введем схему, представленную на рис.17. По данным блока Display,  Постоянные потери в двигателе:  где  – номинальные потери, – номинальные потери, – переменные номинальные потери. – переменные номинальные потери.   Постоянные потери энергии за цикл:  Переменные потери энергии за цикл:  где  Потери энергии за цикл:  КПД за цикл:  ЗАКЛЮЧЕНИЕ В данной работе был исследован и разработан электропривод механизма передвижения тележки. Целью работы являлось закрепление, углубление и обобщение знаний в области теории электропривода путем решения комплексной задачи проектирования конкретного производственного механизма. На основе исходных данных и технических требований, в результате анализа, выбрана схема электропривода. Был сделан вывод, что наиболее рациональной системой в данном случае является система ТП-Д. Далее, по нагрузочным диаграммам был выбран двигатель постоянного тока серии 2ПН и произведена проверка по условиям нагрева и допустимой перегрузки. Оказалось, что выбранный двигатель удовлетворяет этим условиям. Также рассчитан силовой преобразователь и выбраны элементы мостовой реверсивной схемы: трансформатор, тиристоры, дроссель. Рассчитаны статические характеристики в замкнутой и разомкнутой системах. Построена уточненная нагрузочная диаграмма за производственный цикл. В конечном итоге не удалось повторить расчетную нагрузочную диаграмму. Выбрана структура замкнутой системы – с подчиненным регулированием координат с применением настройки на технический оптимум. Проведен анализ динамических свойств замкнутой системы. Рассчитаны переходные процессы на ЭВМ. Работа заканчивается расчетом энергетических показателей электропривода. Рассчитаны работа за цикл, потери и КПД. Значение КПД вполне приемлемо для данной системы – 78,8%. Список литературы Ключев В.И. Теория электропривода: Учебник для вузов.- 3-е изд. перераб. и доп. – М.: Энергоатомиздат, 2001 г. – 740 с.:ил. Чебовский О.Г. Моисеев Л.Г., Недошивин Р.П. Силовые полупроводниковые приборы: Справочник. - 2-е изд. - М.: Энергоатомиздат, 1985.-400с. Справочник по электрическим машинам: В 2 т. / Под общей ред. И.П. Копылова, Б.К. Клокова. М.: Энергоатомиздат, 1988, 1989. 1 т. 456 с.; 2 т. 688с. Данилов П.Е. Теория электропривода. [Текст]: монография / П.Е. Данилов, В.А. Барышников, В.В. Рожков. – Смоленск, 2014. – 348 с. Учебное пособие к курсовому проектированию по автоматизированному электроприводу. \ Под ред. Тикаиди В.И. – Смоленск, 1975. – 32с. |