Информация, определение и назначение. Понятие "Данные"
 Скачать 1.55 Mb. Скачать 1.55 Mb.
|

|
30. АСУЖТ, определение. Комплекс информационных технологий управления маркетингом, финансами, экономикой. Комплекс информационных технологий управления маркетингом, финансами, экономикой. Задачи этого комплекса в АСУЖТ оказались менее разработанными. Всего выделено 12 базовых функций, из них: 1) управление маркетинговой деятельностью; 2) управление экономическими процессами; 3) управление тарифной политикой; 4) управление нетрадиционной деятельностью; 5) управление финансовой деятельностью; 6) управление эксплуатацией и ремонтными расходами; 7) управление бухучетом и статистикой. Информационные технологии этого комплекса ориентированы на формирование заказов, увеличение доходов, укрепление конъюнктурного положения за счет сохранения и увеличения доли ж.д. на транспортном рынке. 31. АСУЖТ, определение. Комплекс информационных технологий управления инфраструктурой железнодорожного транспорта. Основные циклы работы. Комплекс информационных технологий управления инфраструктурой железнодорожного транспорта. Инфраструктура железнодорожного транспорта представлена как совокупность хозяйств, обеспечивающих с помощью основных технических средств перевозки грузов и пассажиров. Этот комплекс представлен 17 основными функциями, в том числе управлением: 1) эксплуатационной работой пассажирского хозяйства; 2) эксплуатационной работой хозяйства в пути; 3) эксплуатационной работой хозяйства СЦБ и связи; 4) эксплуатационной работой хозяйства электроснабжения; 5) эксплуатационной работой локомотивного хозяйства; 6) эксплуатационной работой вагонного хозяйства; 7) эксплуатационной работой гражданских сооружений. Все множество технологических процессов в этом комплексе сведено к двум основным циклам: внешнему и внутреннему. Внешний цикл - реализует обеспечение перевозочного процесса перевозочными ресурсами. Внутренний цикл - обеспечивает техническое состояние объектов инфраструктуры, требуемое для выполнения перевозочного процесса. 32. АСУЖТ, определение. Комплекс информационных технологий управления непроизводственной сферы. Комплекс информационных технологий управления непроизводственной сферы Он представлен 6 функциями: 1) управлением учебными заведениями; 2) управлением персоналом; 3) управлением жилищно-коммунальным хозяйством; 4) управлением рабочим снабжением; 5) управлением здравоохранением; 6) управлением НТИ. Информационные технологии взаимодействуют как внутри комплексов, так и между ними. Установлено свыше 30 основных внешних информационных связей между комплексами ИТ. 33. АСУЖТ, определение. Внешние информационные связи между комплексами информационных технологий.  Взаимодействие между КИТ 1.Заявка. 2.Проект плана перевозок. 3.Отчеты о доходах и расходах. 4.Учет эксплуатационной работы, работы локомотивных бригад. 5.Экономические нормативы. 6.Уточненные квартальные нормативы экономической деятельности. 7.План доходов, расходов. 8.Распределение расходов. 34. Сети передачи данных на ЖД транспорте. Вычислительная сеть. Ключевые понятия. Развитие сетей передачи данных на ж. д. транспорте прежде всего обусловлено разработкой автоматизированной системы оперативного управления грузовыми перевозками (АСОУП) и автоматизированной системы управления пассажирскими перевозками ("Экспресс"). Вычислительная сеть (ВС) является взаимосвязанной совокупностью территориально рассредоточенных систем обработки данных, средств и систем связи и передачи данных, обеспечивающих пользователям дистанционный доступ к ее ресурсам и коллективное использование этих ресурсов. В состав ВС входит два основных множества территориально рассредоточенных объектов: 1. множество систем обработки данных, включающих в себя различные ЭВМ для выполнения вычислений, хранения баз данных, поиска информации, а также терминального оборудования, обеспечивающего взаимодействие пользователей с системами обработки данных; 2. множество средств связи и передачи данных, обеспечивающих в общем случае как дистанционный доступ пользователей к ресурсам систем обработки, так и обмен информацией между различными удаленными системами обработки, а также между отдельными пользователями сети. Сеть передачи данных состоит из множества территориально рассредоточенных узлов коммутации, соединенных друг с другом и с абонентами сети при помощи различных каналов связи. Узел коммутации представляет собой комплекс технических и программных средств, обеспечивающих коммутацию каналов, сообщений или пакетов. Коммутация – распределение информации, при которой поток данных поступает в узел по одним каналам связи, передается по другим, с учетом требуемого маршрута передачи. Концентраторы – устройства, объединяющие нагрузку нескольких каналов передачи данных, для последующей передачи по меньшему числу каналов. Канал связи – совокупность технических средств и среды распространения, обеспечивающей передачу сообщения любого вида от источника к получателю при помощи сигналов электрической связи. 35. Сети передачи данных на ЖД транспорте. Виды СПД. Обеспечивает обмен сообщениями в нежестком по времени режиме и передачу сообщений и файлов при межмашинном обмене. Система имеет трехуровневую структуру: 1. уровень линейных предприятий; 2. дорожный уровень; 3. сетевой уровень. СПД линейного уровня предназначена для автоматизированного съема, централизованного сбора, распределения потребителям в реальном масштабе времени оперативной информации. СПД линейных предприятий строится на базе концентраторов информации (КИ) и линейных контроллеров (ПК), подключаемых к КИ. В свою очередь, к ПК подключается оконечное оборудование контролируемых объектов. В СПД ЛП может быть реализовано два варианта структур: радиально-узловая и многоточечная. СПД линейных предприятий (СПД-ЛП) предназначена для автоматизированного съёма, централизованного сбора, обработки, передачи и распределения по потребителям оперативной, в том числе диагностической, информации в реальном масштабе времени. По сети передаются данные о состоянии линейных технологических объектов, технических средств и систем автоматики, связи, энергетики; устройств контроля состояния подвижного состава на ходу поезда (ПОНАБ, ДИСК). Пользователями этой системы единой для всех служб сети являются работники службы движения (ДСП, ДНЦ, ДНЦО и т.д.), работники хозяйств Э, СЦБ и др. Централизованный сбор, накопление и хранение первичной информации производится на общем сервере СПД-ЛП, включенном в локальную вычислительную сеть (ЛВС) центра сбора информации. В эту же ЛВС включаются АРМ пользователи СПД-ЛП, которые получают необходимую им информацию. СПД дорожного уровня обеспечивают в пределах железной дороги обмен информацией между абонентами и системами обработки данных, решающими прикладные задачи управления перевозками и другими видами деятельности на ж. - д. транспорте. Основной системой, требующей непрерывного обмена информацией и создающей интенсивные информационные потоки, которые должна передавать СПД дороги, является АСУ перевозками (АСУП). Для обеспечения функционирования АСУП необходимо связать большие системы обработки данных в ИВЦ дороги с многочисленными АРМ, поставляющими оперативные данные о движении, дислокации и изменении состояния поездов, вагонов и грузов. СПД дорожного уровня может производить обмен информацией с СПД-ЛП, а так же с локальными вычислительными сетями управления дороги, отделений дороги, ЦФТО и т.д. АСУСС и АСУГУ также обмениваются информацией с ИВЦ дороги по выделенным телефонным каналам. Отдельную группу абонентов СПД дорожного уровня представляют комплексные системы АРМ (САРМ) на станциях. В САРМ объединяются группы абонентов, использующих в своей работе общий сервер, функционально ориентированный на решение определенного круга задач управления перевозками. СПД сетевого уровня осуществляет межрегиональный обмен информацией между ГВЦ ОАО и ИВЦ железных дорог, а также ИВЦ соседних дорог, Сеть построена на базе выделенных телефонных каналов связи, В СПД сетевого уровня реализуется межмашинный обмен информацией между ИВЦ соседних дорог. По выделенным каналам связи передаются данные о составе поездов (ТГНЛ поездов), переходящих с одной дороги на другую, а также другие сообщения, обеспечивающие ведение поездных и вагонных моделей на уровне дороги. 36. Сети передачи данных на ЖД транспорте. Радиально-узловая и многоточечная структуры.  Многоточечная структура СПД ЛП ориентирована на линейную топологию участка железной дороги. В СПД ЛП с такой структурой сервер СПД производит циклический опрос узлов КИ по групповому каналу. За время цикла опроса каждый узел получает долю времени для занятия группового канала и производит за это время обмен информацией между узлом и сервером СПД. Многоточечная структура СПД ЛП представлена на рисунке 2.  38. АСОУП. Определение, состав АСОУП. АСОУП – это пакет программ, связанный с управлением движением поездов, работой сортировочных станций и маршрутами движения поездов. Автоматизированная система оперативного управления перевозками на дороге (АСОУП) предназначена для создания и поддержания в реальном времени информационной динамической модели перевозочного процесса, прогнозирования и текущего планирования эксплуатационной работы предприятий железной дороги. АСОУП является центром всей системы управления перевозками, она обеспечивает оперативной и достоверной информацией практически все уровни управления через системы на станциях и других линейных предприятиях, а также путем взаимодействия с системами верхнего уровня. В состав АСОУП входят следующие значимые дорожно-сетевые системы: 1. автоматизированная система управления работой сортировочных станций – АСУСС; 2. автоматизированная система управления пассажирскими перевозками АСУ «Экспресс»; 3. интегрированная обработка дорожных ведомостей (ИОДВ); 4. интегрированная обработка маршрутов машиниста (ИОММ АСУТ). 43. Понятие "Локомотив". Основные контролируемые параметры. Технические состояния объектов. Основные виды датчиков. Локомотив — самоходный рельсовый экипаж, предназначенный для тяги несамоходных вагонов. (паровоз, тепловоз, электровоз), движущаяся по рельсам и предназначенная для передвижения железнодорожных поездов. Локомотив и его оборудование являются «объектом технического диагностирования», у которого следует определить: 1. техническое состояние (постановка диагноза); 2. места отказа (локализация отказа); 3. причина отказа; 4. прогнозирование технического состояния; 5. сбор аварийной схемы (перспективная функция). Основные диагностические параметры – это множество входных и выходных сигналов объекта диагностирования. Их использование обязательно и достаточно для проверки работоспособности. Внутреннее состояние представляет собой совокупность дополнительных диагностических параметров и используется для локализации отказа и прогнозирования работоспособности. Множество технических состояний состоит из 2-х элементов: 1. исправное состояние; 2. неисправное состояние. Датчики Главное при диагностировании – это контролепригодность самого объекта диагностирования. Датчик – устройство, преобразующее контролируемую физическую величину в электрический сигнал: все измерительные системы могут измерить один из следующих параметров электрического сигнала, в который и надо преобразовать контролируемый показатель: 1. напряжение; 2. частота импульсного электрического сигнала; 3. периодичность поступления электрического сигнала; 4. число импульсов электрического сигнала; 5. длительность электрического сигнала; 6. наличие электрического сигнала (есть или нет). Установка датчиков в цепях локомотива – достаточно дорогой и не всегда возможный процесс. Один из ключевых датчиков – датчик силового тока с гальванической развязкой, требующий дополнительного питания. Второй не менее важный датчик – датчик угла поворота, используемых для определения скорости вращения колесных пар для дальнейшего вычисления скорости движения локомотива. Устанавливают датчик обычно на две колесные пары и более. В последних локомотивах – на все колесные пары. Датчик давления широко используется для диагностирования дизеля и автотормозов. Датчик виброускорений пока не так распространен в бортовых системах, как предыдущие – пока чаще используется в стационарных системах диагностирования («Прогноз», «Вектор» и др.). 44. Колесно-моторный блок и его контролируемые параметры. Главный параметр КМБ – это электрический ток. Именно ток определяет силу тяги ТЭД, КМБ и локомотива в целом. Можно утверждать, что ток ТЭД – главный диагностический параметр локомотива. Ток ТЭД представляет собой аналоговый сигнал, меняющийся во времени в диапазоне от 0 до тысяч Ампер. При анализе тока следует контролировать следующие его характеристики: 1. абсолютное значение, А; 2. превышение времени езды с пятиминутным током; 3. превышение времени езды с часовым током; 4. наличие скачков тока; 5. скорость нарастания тока; 6. разброс токов по параллельно работающим КМБ; 7. колебание тока; наличие высокочастотных помех; 8. срабатывание защит по скорости нарастания тока, по разбросу токов По параметрам тока ТЭД можно судить о работоспособности большинства систем локомотива. Наряду с током каждого из тяговых электродвигателей желательно знать общий ток локомотива. Особенно это актуально для тепловозов, где генератор электрического тока находится непосредственно на локомотиве. Наряду с током ТЭД у КМБ желателен контроль следующих параметров: 1. скорость вращения колесных пар; 2. температуры обмоток якоря и обмоток возбуждения; 3. наличие искрения коллектора; 4. напряжение на ТЭД; 5. вибрация; 6. температура подшипников буксового узла; 7. наличие боксования и юза. 47. МСУД-Н. Функциональная схема в режиме тяги, ее работа. Микропроцессорная система управления и диагностики (МСУД-Н) предназначена для управления силовой схемой одной секции электровоза. При этом МСУД-Н реализует следующие функции: 1. ввод сигналов задания с контроллера управления электровозом; 2. ввод и обработка сигналов с датчиков тока (ДТ) тяговых электродвигателей (ТЭД); 3. ввод и обработка сигналов с ДТ возбуждения ТЭД; 4. ввод и обработка сигналов с датчиков скорости (ДС); 5. ввод и обработка сигналов с датчиков напряжения в контактной сети (ДН); 6. ввод и обработка сигналов с датчиков напряжения на ТЭД; 7. формирование нерегулируемых углов α0, α0З, в режиме тяги; 8. формирование регулируемого угла αР; 9. реализация алгоритма управления выпрямительно-инверторным преобразователем ВИП; 10. формирование выходных импульсов управления каналами ВИП (α1 … α8); 11. реализация алгоритма управления ВУВ; 12. формирование импульсов по двум выходным каналам ВУВ (αВ1 … αВ2); 13. реализация алгоритма управления шунтированием обмотки возбуждения (ОВ); 14. формирование импульсов управления шунтированием (αШ1 … αШ4); 15. защита от боксования; 16. защита по максимальному току; 17. защита по темпу нарастания тока; 18. защита по соотношению тока возбуждения и якоря ТЭД; 19. программная реализация регулятора скорости; 20. программная реализация регулятора тока; 21. программная реализация регулятора тока возбуждения; 22. самодиагностика и автоматический переход на резервные схемы включения аппаратных средств; 23. взаимодействие с бортовым компьютером (БК); 24. прием команд машиниста через клавиатуру управления (КУ) БК; 25. реализация на базе БК системы подсказок для машиниста по работе с локомотивом, в том числе в аварийных ситуациях; 26. диагностирование технического состояния локомотива по имеющимся в системе данным; 27. интеллектуальная защита от повторного включения аппаратов защиты для предотвращения пожароопасных ситуаций; 28. накопление диагностической информации с возможностью ее переноса на переносной компьютер или другой накопитель информации; 29. привязка всей диагностической информации к реальному времени; 30. функции выдачи рекомендаций машинисту по порядку действий в тех или иных ситуациях, в том числе в аварийных; 31. возможность в дальнейшем развития задач навигации с привязкой к электронной карте; 32. самотестирование с определением работоспособности МСУД-Н и автоматическим сбором резервной схемы включения аппаратных средств; 33. возможность взаимодействия с приборами безопасности, прежде всего с САУТ-ЦМ. 34. автоматическое определение числа рабочих секций; 35. распределение нагрузки между секциями; 36. автоматический вход в ручной режим работы в случае нарушения связи с бортовым компьютером (БК). На рисунке 1 представлена состоящая из четырех узлов функциональная схема МСУД-Н: 1. МСУД-Н-БУ – подсистема управления ВИП, ВУВ, ШТ; 2. МСУД-Н-ДСП – подсистема диспетчеризации; 3. МСУД-Н-ВВ – подсистема ввода вывода сигналов; 4. Среднего уровня бортового компьютера БК. Сигналы управления поступают в МСУД-Н: 1. с контроллера машиниста КМЭ в виде сигналов Iз и Vз; 2. датчиков тока I1… I4; 3. датчиков скорости (частоты вращения колесных пар) n1 … n4; 4. датчиков слежения за напряжением контактной сети Uсл1… Uсл4; 5. сигналы с релейно-контакторных аппаратов (РКА) в блок ВВ. Входные сигналы обрабатываются входными аппаратными средствами блока синхроимпульсов (БСИ), блоком формирования амплитудных сигналов (БФА), блоком формирования импульсных сигналов (БФИ) и ВВ с дальнейшей передачей оцифрованной информации в микропроцессорный блок БМК. 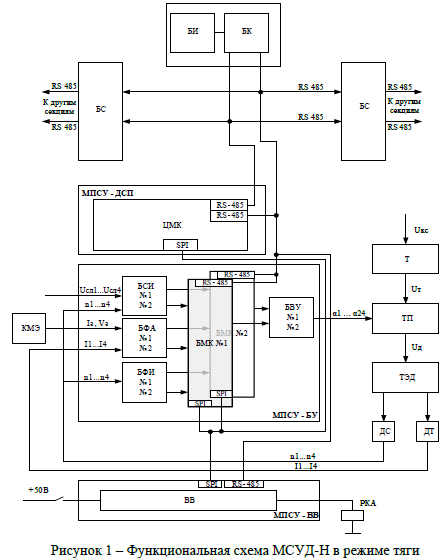 При этом: 1. БСИ по входным сигналам осуществляет аппаратное вычисление сигналов управления ВИП; 2. БФА работает с аналоговыми сигналами и в своей основе содержит операционные усилители, выполняющие роль нормирующих; 3. БФИ работает с импульсными сигналами и по сути представляет собой частотомер (счетчик сигналов); 4. ВВ работает с бинарными сигналами (включен/выключен) РКА цепей управления. Все принятые сигналы поступают в БМК по внутреннему интерфейсу SPI. Выходные сигналы МСУД-Н также формируются аппаратно в: 1. БВУ – импульсные сигналы управления углом открытия тиристоров; 2. ВВ – включение и выключение РКА В каждый полупериод работы ТП происходит информационный обмен между МСУД-Н-БУ и МСУД-Н-ДСП по интерфейсу SPI. МСУД-Н-ДСП, в свою очередь, осуществляет информационный обмен с бортовым компьютером БК по интерфейсу RS-485. По этому же интерфейсу происходит обмен информацией с ведомыми (или ведущей) секциями этого же или работающих в сплотке электровозов. МСУД-Н допускает работу по системе многих единиц (СМЕ) до четырех секций, каждая из которых работает функционально автономно. Все параметры, необходимые для работы МСУД-Н поступают и обрабатываются в блоках управления в пределах своей секции. Связь с МСУД-Н других секций, осуществляется по интерфейсу RS-485 через блоки сопряжения (БС). При запуске электровоза, определяется ведущая МСУД-Н, остальные работают в режиме подчиненного регулирования. |