Теория систем ЛПУ.. Использование моделей и методов конечных автоматов при проектировании дискретных систем логикопрограммного управления
 Скачать 455.38 Kb. Скачать 455.38 Kb.
|

|
Министерство науки и высшего образования РФ Федеральное государственное бюджетное образовательное учреждение высшего образования «Омский государственный технический университет» Домашняя работаПо дисциплине «Теория систем логико-программного управления» Тема «Использование моделей и методов конечных автоматов при проектировании дискретных систем логико-программного управления» Вариант 3 Выполнил: Студент гр. ЗАТП-182 Кукуруза Д.Н. Проверил: Ст.пр. Гудинов В.Н. Омск 2021 СодержаниеВведение Исходный граф и функциональная схема Описание работы Составление графа функционирования системы управления a. Получение(синтез) логических функций управления Релейно-контактная схема Бесконтактная логическая схема Построение циклограммы Заключение Литература ВведениеЦелью данной курсовой работы является проектирование дискретной цикловой САУ Система с путевым контролем - это такая система. в которой выполнение каждой последующей функции может быть начато только после окончания предыдущей функции. о чем в САУ должен прийти сигнал с датчика обратной связи. Дискретная САУ (логическая) – это система, в которой все элементы и сигналы могут принимать только два устойчивых состояния (логический“0” и “1”). Что бы получить информацию о ходе процесса применяют датчики – элементы автоматики, преобразующие физические величины в дискретный сигнал для последующей обработки в автоматическом устройстве или ЭВМ. Затем этот сигнал сравнивается с другими сигналами, анализирует его изменение. В результате обработки информационных сигналов вырабатывается исполнительные сигналы, которые действуют на технологический процесс. Эти сигналы в исполнительных элементах автоматики преобразуются в механическое воздействие. Т.к. это воздействие требует значительной энергии, то исполнительные сигналы предварительно усиливаются. Проектирование автоматической системы осуществляется на примере трёх устройств. Проектирование осуществляется в несколько этапов: Словесное описание работы устройств. Построение графа функционирования САУ. Синтез логических функций. Построение РКС. Построение БЛС. Построение циклограммы работы системы 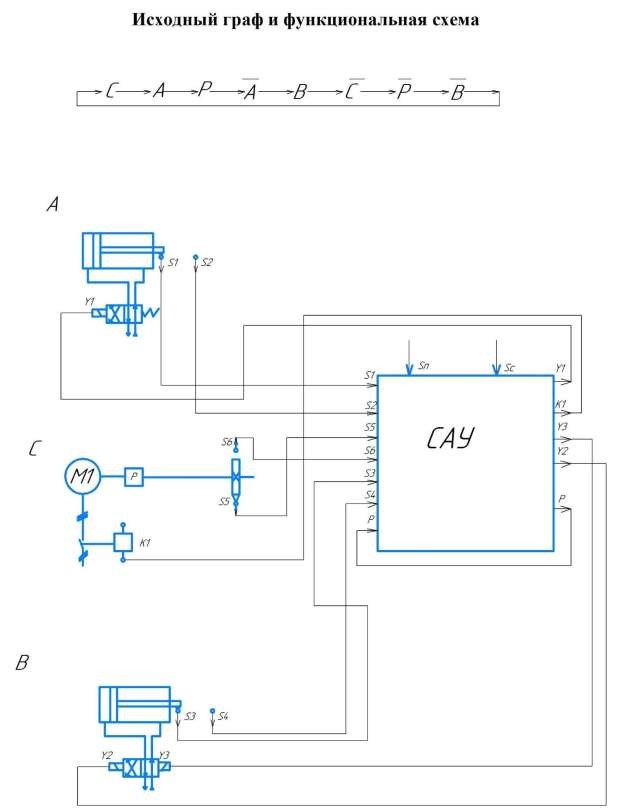 Описание работы Работа начинается с нажатия кнопки Sп. Контакты реле К1 двигателя М1 замыкаются, вследствие этого колесо, соединенное через вал начнет вращаться, съезжая с выключателя S5 и повернувшись на 1800 от исходного положения наезжает на выключатель S6.Далее выключается реле К1 включается катушка Y1, и распределитель №1 переходит в рабочее положение при этом воздух из правой камеры пневмоцилиндра А будет выделятся в атмосферу. а в левую - нагнетаться и поршень начнет двигаться вправо, тем самым размыкая концевик S1 и замыкая концевик S2. Когда замкнется S2 включается элемент памяти Р. Затем катушка Y1 выключается, и благодаря пружинному возврату распределитель №1 переключается в исходное положение при этом воздух из левой камеры пневмо-цилиндра А будет выделятся в атмосферу. а в правую - нагнетаться и поршень начнет двигаться влево, тем самым размыкая выключатель S2 и замыкая концевой выключатель S1. После чего катушка Y3 выключается, а катушка Y2 включается вследствие этого распределитель №2 переходит в рабочее положение при этом воздух из правой камеры пневмоцилиндра В будет выделятся в атмосферу. а в левую - нагнетаться и поршень начнет двигаться вправо, тем самым размыкая концевик S3 и замыкая концевик S4. Когда замкнется S4 реле К1 двигателя М1 замыкаются, вследствие этого колесо, соединенное через вал начнет вращаться, съезжая с выключателя S6 и повернувшись на 1800 наезжает на выключатель S5. Когда замкнется S5 выключится элемент памяти Р. После чего выключается реле К1, катушка Y2 выключается, а катушка Y3 включается вследствие этого распределитель №2 переходит в исходное положение при этом воздух из левой камеры пневмоцилиндра В будет выделятся в атмосферу. а в правую - нагнетаться и поршень начнет двигаться вправо, тем самым размыкая концевик S4 и замыкая концевик S3. Цикл закончился. После этого цикл начинает повторятся сначала. Работу всей системы можно прекратить. в любом ее этапе. нажатием кнопки Sс. 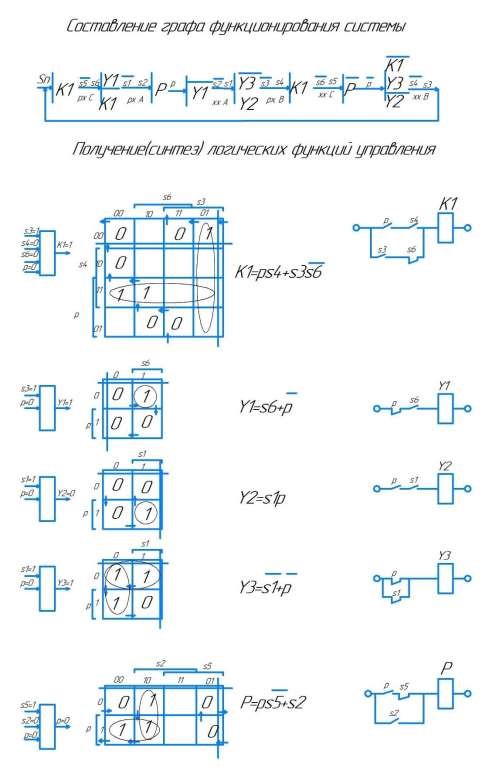 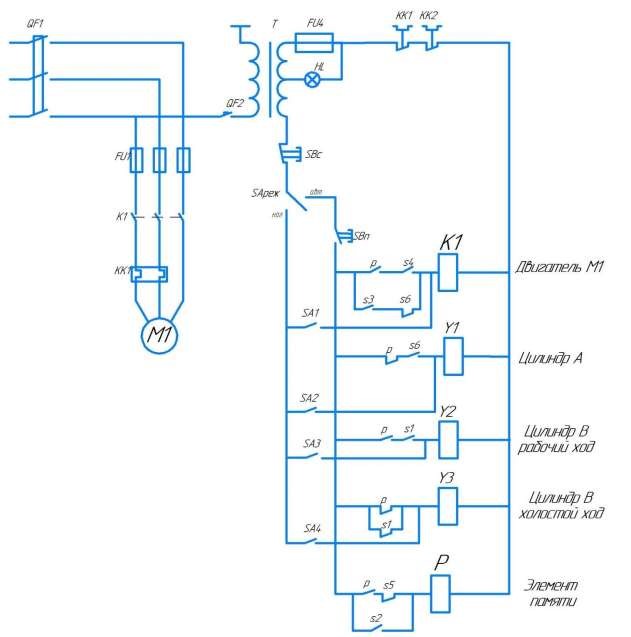 Рисунок 1 Релейно-контактная схема 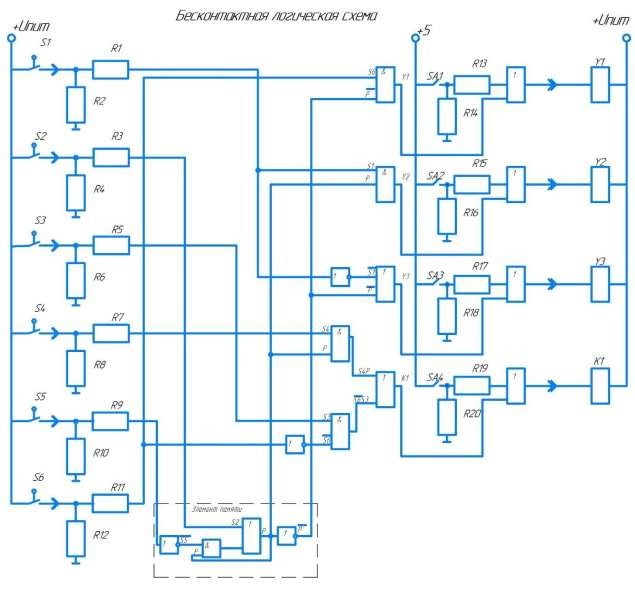 Рисунок 2 Бесконтактная логическая схема 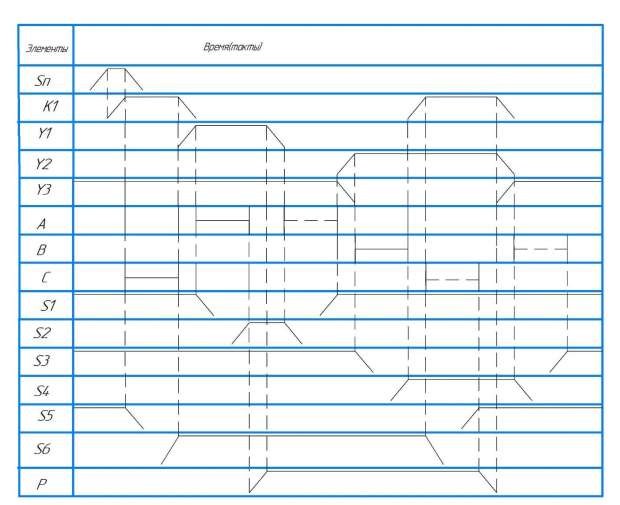 Рисунок 3 Циклограмма 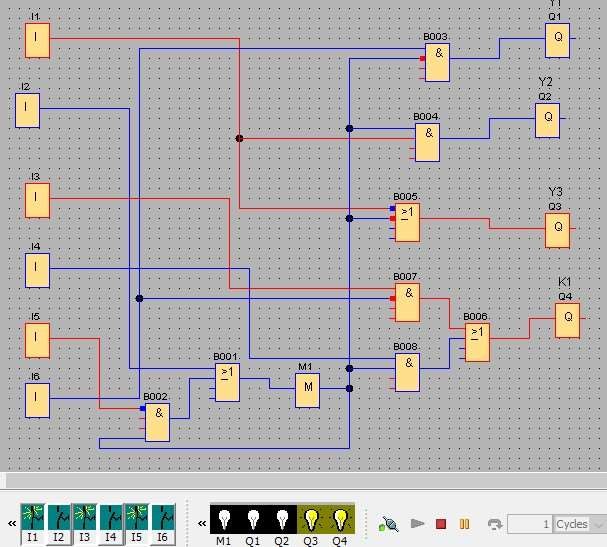 Рисунок 4 Logo Soft 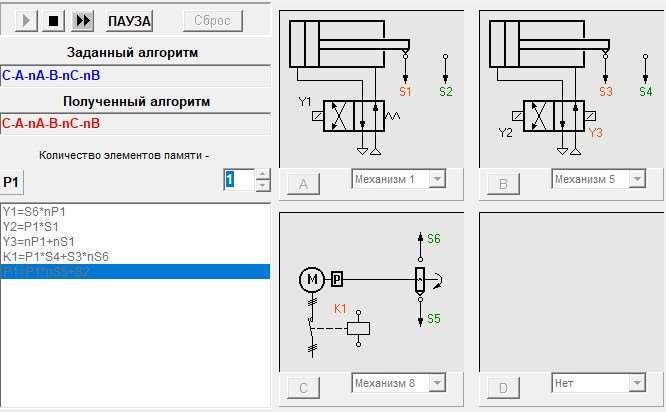 Рисунок 5 Синтез ДА ЗаключениеПроделав данную курсовую работу я спроектировал дискретную децентрализованную САУ с путевым контролем. В данной работе я построил граф функционирования системы, составил уравнения по матрицам Карно, с помощью этих уравнений построил РКС и БЛС, и после этого построил циклограмму функционирования системы и проверил в программах Logo Soft, Синтез ДА. ЛитератураАристов В.В. Основы теории автоматов: Конспект лекций.– Омск: Издво ОмГТУ, 2006. – 84 с. Аристов В.В. Использование моделей и методов конечных автоматов при проектировании дискретных систем управления: Метод. указания для практ. занятий и самостоятельной работы – Омск: Изд-во ОмГТУ, 2006. – 36 с. Аристов В.В., Гудинов В.Н. Сборник заданий и упражнений по дискретной математике: Практикум. – Омск: Изд-во ОмГТУ, 2006. – 52 с. Гудинов В.Н., Аристов В.В., Корнейчук А.П. Программная реализация логических функций управления цикловым технологическим оборудованием: Метод. указания к лаб. работам. – Омск: Изд-во ОмГТУ, 2002. – 20 с. |