Диссертация. Исследование и разработка инаваций в конструкцию рабочего органа автогрейдера 071300 тттиг диссертация на соискание ученой степени
 Скачать 6.12 Mb. Скачать 6.12 Mb.
|

|
Автогрейдер XCMG GR180 Автогрейдер XCMG относится к землеройно-транспортным машинам. Предназначен для послойной разработки грунта с его поперечным перемещением. Используется в основном для выполнения землеройных и планировочных работ в дорожном строительстве. Автогрейдер XCMG предназначен также и для выполнения работ коммунальных служб, для ремонта и содержания улиц, тротуаров и площадей, а также для выполнения работ по содержанию автомобильных дорог. Грейдер XCMG может использоваться для планировки откосов, выемок, насыпей, канав, очистки дорог от снега, снятия наледи с дорожного полотна, перемещения и смешивания материалов с добавками или вяжущими материалами на полотне дороги, а также выполнять рыхление асфальтовых покрытий, и тяжелых грунтов. Основным рабочим органом грейдера XCMG является грейдерный отвал. Опции: ROPS, кондиционер, ультразвуковая или лазерная система автоматического нивелирования Topcon или MOBA, включает датчик определения продольного наклона автогрейдера, датчики поперечного уклона и поворота отвала. Использование этих сенсоров позволяет системе точно рассчитывать текущий наклон ножа. Для позиционирования планировочного отвала по высоте могут использоваться ультразвуковые и лазерные сенсоры. При работе с ультразвуковыми сенсорами в качестве опорной поверхности используется специальная струна, бордюр или другая существующая поверхность. Система управления с ультразвуковым контролем отметки может легко стать одномачтовой или двухмачтовой лазерной системой. Одновременно на отвале может находиться как ультразвуковой, так и лазерные сенсоры. Передний отвал, рыхлитель (кирковщик), система GPS Vickers. Описание функций ТО. Автогрейдер XCMG GR180
Комплектация: передний (бульдозерный) отвал, средний отвал (нож), задний рыхлитель из пяти наконечников, кондиционер, система холодного запуска (1). 1.3 Анализ патентной информаций и выявлеие перспективных типов исполнения рабочего оргона автогрейдера Был произведен анализ динамики патентования найденных охранных документов (wipo.into., www.fips.ru). Патенты и авторские свидетельство, описывающие конструкции рабочего органа автогрейдера, перегруппированый авторами в соответствии с выявленными в морфологической таблице 1. В таблице 2 представлена динамика патентования собранных патентов рабочего органа автогрейдера. Таблица 2 Динамики патентования рабочего органа автогрейдера
Поскольку получить точные данные о количестве патентов, поданных в рассмотриваемый период, затруднительно авторы в данном анализе сделали акцент на патентное ведомство США ( www.google.com/patents). Это можно объяснит тем, что США является высокоразвитым государством с высоким уровнем науки и индустриализации. Соответственно, ученые США предлагают наиболее актуальные решения и данное патентное ведомство имеет весомый интерес для детального изучения и выявления перспективных направлений развития техники.
Проведенный анализ позволил выявить, несколько недостатков: а) малая скорость при роботе; б) в связи с тем, что автогрейдер работает от ДВС происходит значительное выделение выхлопных газов, что загрязняет окружающей среду; в) недостатком в рабочем органе механизма поперечного переме щения отвала является быстрый износ подшипника скольжения, что значительно снижает моторесурс рабочего оборудования автогрейдера. Из-за попадания пыли, грязи и мусора между направляющим и подшипником, процесс изнашивания ускоряется, это являеться одним из недастатков который требует рассмотрения. Из таблицы протатипом был выбран Американский патент - US20020170724. На основе проведенной патентной анализе учитывая современные тенденции развития рабочего оргна автогрейдера, авторы предлагаем свою «новую конструкцию подвески отвала на поворотного круга автогрейдера». Американский патент ( US20020170724). Презентация регулировка шина для грейдера лезвия. Заявка: 10073110 Дата Применение: 12.02.2002 Номер публикации: 20020170724
Дата публикации: 21.11.2002
Публикация Вид: В2 МПК:E02F3/815; E02F 3/76. Претенденты: Volvo Motor Graders Limited. Изобретатели: McGugan, Edward. Агенты: Blake, Cassels & Graydon LLP. Приоритет данных: 2348202 18.05.2001 CA. Название: (EN) Презентация регулировка шина для грейдера лезвия Аннотация: Опорная конструкция подшипника для грейдера лезвия использует короткий ход гидроцилиндров для компенсации износа между подшипниками скольжения и слайд рельсы грейдер лезвия.Цилиндры предпочтительно под давлением от смазки и масленка обеспечивается для каждого цилиндра, чтобы обеспечить удобный доступ, чтобы позволить обслуживание оператором. Предпочтение будут цилиндры расположены в целом замкнутой полости между держателем опорного подшипника и подшипником скольжения. Область изобретения Настоящее изобретение относится к автогрейдеров и, в частности, относится к расположению подшипник скольжения для грейдера лезвия. Предпосылки создания изобретения Градация лезвие грейдер подлежит множеством регулировок и природы механизма и характер применения подвергает систему к высоким нагрузкам. Кроме того, условия эксплуатации автогрейдера часто вызывают существенное загрязнение и который является особой проблемой для слайд-механизма грейдер лезвия как может произойти ускоренный износ. Настоящее изобретение обеспечивает альтернативную структуру и способ для поддержки грейдер лезвие, которое легче поддерживать. Краткое изложение сущности изобретения Грейдер опорная конструкция включает в себя лезвие лезвие грейдера с верхней и нижней направляющих планок, прикрепленных к задней поверхности лопасти и опорной структуры, имеющей лезвие серию верхних и нижних подшипниковых которые взаимодействуют с рельсов и разместить продольную скользящее движение лезвия и направляющие. Каждый подшипниковый включает в себя держатель опорного подшипника, прикрепленный к опорной конструкции с этим держатель опорный подшипник поддержки и удержания подшипник скольжения. По крайней мере, некоторые из подшипниковых включать регулировочный механизм для уменьшения допусков между подшипников скольжения и направляющих. Механизм регулировки по меньшей мере один короткий ход гидроцилиндра поддерживается в соответствующем держателе подшипника и выступает в качестве посредника между держателем подшипника и подшипником скольжения. Каждый гидравлический цилиндр включает в себя пресс-масленка и положение гидравлического цилиндра регулируется с помощью масленки. В соответствии с аспектом настоящего изобретения опорная конструкция лезвие грейдер имеет два гидравлических цилиндров как часть каждого регулировочного механизма с этими гидравлические цилиндры разнесены по длине соответствующего подшипника скольжения. В еще одном аспекте настоящего изобретения, каждый подшипник держатель подложки, имеющей указанный механизм регулировки включает доступный порт для каждого гидравлического цилиндра и масленка находится в пределах доступного порта. Краткое описание чертежей Предпочтительные варианты осуществления изобретения показаны на чертежах, на которых: Фиг. 1 представляет собой перспективный вид, показывающий компоновку поддержки лезвия для грейдер; Фиг. 2 представляет собой вид сбоку опорной конструкции лезвие; Фиг. 3 представлен разнесенный вид в перспективе подшипниковой; Фиг. 4 представляет собой перспективный вид, иллюстрирующий собранную расположение опорного подшипника; Фиг. 5 показан частичный вид в разрезе, показывающий расположение опорного подшипника. Подробное описание предпочтительных вариантов Устройство поддержки лезвия 2 для грейдер показано на фиг. 1 с возможностью скольжения лопатки 4 смещены относительно поворотной кольцевого зубчатого колеса 6 . Опорная конструкция включает в себя идущих вниз руки 8 , которые шарнирно поддерживают структуру центр pivotting 30 на нижней кромки. Эта поддержка структура 30 включает в себя связанные верхние подшипниковых узлов 52 и более низкие подшипниковых узлов 54 , присоединенные к ним. Устройство поддержки лезвия 2 для грейдер показано на фиг. 1 с возможностью скольжения лопатки 4 смещены относительно поворотной кольцевого зубчатого колеса 6 . Опорная конструкция включает в себя идущих вниз руки 8 , которые шарнирно поддерживают структуру центр pivotting 30 на нижней кромки. Эта поддержка структура 30 включает в себя связанные верхние подшипниковых узлов 52 и более низкие подшипниковых узлов 54 , присоединенные к ним. Грейдер лезвие 4 имеет верхнюю направляющую 20 , закрепленный на задней поверхности лопасти и нижнюю направляющую22 , закрепленный на задней поверхности. Верхние опорные механизмы 52 и нижние опорные механизмы 54 служат для крепления лопасти 4 на опорной конструкции 30 и позволить скользящего перемещения лезвия, поскольку направляющие скольжения внутри подшипниковых. Гидравлический цилиндр 32 позволяет наклон опорной конструкции 30 , который в свою очередь вызывает наклон лопатки 4 . Детали нижней подшипниковой 54 показаны в разобранном виде на фиг. 3. Опорный подшипник держатель 56 имеет U-образный канал 70 размера получать и удерживать подшипник скольжения 58 . Подшипник скольжения 58 имеет V-образную форму верхней поверхности для зацепления нижнюю направляющую. Два порта 72 предусмотрены в держателе подшипника и получают короткий ход гидравлических цилиндров 80 . Эти гидравлические цилиндры включают ступенчатую внешнюю оболочку 82 , имеющую кольцевой шаг 84 . Эта кольцевая шаг входит в зацепление с U-образный канал с нижней части гидравлического цилиндра принимаемой в пределах соответствующего порта 72 . Гидравлический цилиндр включает в себя подвижный поршень 86 , имеющий кольцевое уплотнение 88 , полученную в канавку90 с поршнем, вставленного в цилиндр 92 . Цилиндр закрыт торцевой стенкой 94 и масленка 96 приводится в торцевой стенке.Гидравлический цилиндр короткий ход предпочтительно заполнена консистентной смазкой и позволяет регулировать положения поршня 86 . Этот поршень входит в зацепление с задней поверхностью подшипника 58 и позволяет регулировать положение подшипник 58 по отношению к держателю. Два гидравлических поршней предоставляются и контролировать положение подшипника 58 . Подшипник показан в собранном состоянии в фиг. 4 и 5 . Поршень оказывает давление на подшипник и автоматически регулирует для износа подшипников. Масленки 96 , как показано на фиг. 5 подвергается в порту 72 и позволяет оператору доступ к фитинга. Как показано в собранном зрения фиг. 1 , смазочные фитинги доступны, и оператор может регулировать положение подшипников по отношению к держателям и, таким образом, уменьшить допуск только с помощью шприц, чтобы увеличить давление и тем самым изменить положение поршней 86 внутри гидравлических цилиндров . Таким образом, оператор во время нормальной эксплуатации или во время его первого утренней прогулки вокруг грейдер или по желанию, можно устранить для любого износа между направляющих и подшипников. Таким образом, оператор может уменьшить колебание лезвия и может иметь больший контроль над лезвием на ежедневной основе. Падение гидравлических цилиндров, как правило, находится в пределах, по существу, замкнутой полости между держателем подшипника и подшипником скольжения. Нижний держатель 54 имеет два фланца 120 и 122 , и эти фланцы расположены на расстоянии друг от друга, чтобы обеспечить вставку проходящей вниз кронштейна 8 . Подшипники предоставляются в портах 124 и 126 и таким образом обеспечить pivotting движения опорной конструкции 30 . Опорная конструкция 30 механически закреплен на нижних подшипников через наружу крепежного фланца 110 , имеющий четыре порта 112 . Как правило, это будет обеспечено с помощью гайки с болтом. Крепежные держателя может быть относительно прост, как тонкая регулировка положения подшипников осуществляется по коротким ходом гидравлических цилиндров. Как показано на фиг. 1 , верхние держатели подшипников имеет такой же конструкции, однако, фланцы 120 и 122 нет. Верхние опоры удерживать крепежный фланец 110 , а клин 130 предусмотрен в центре на фланце. Было обнаружено, что этот механизм поддержки лезвия обеспечивает улучшенное управление грейдер лезвие, удобно регулировать и не особенно склонны к обслуживанию. Кроме того, он может быть оценено, если один из печатями поршней терпят неудачу, то результат будет, возможно, некоторые утечки смазки, которая будет просто улучшить смазку подшипников и не вызовет существенных проблем. Кроме того, существует два гидравлических цилиндра в держателе подшипника и некоторое содержание толерантности до сих пор достигнут. Формула изобретения: 1. Расположение опорный подшипник для направляющей части грейдера лезвия, включающий в себя держатель подшипника, съемный подшипник, полученные в указанной держатель и по крайней мере один регулировочный механизм для изменения положения указанного подшипника в упомянутый держатель, указанный механизм регулировки находясь в упомянутом крепеже между задняя поверхность упомянутой несущей и держатель подшипника и действующая на задней поверхности указанного подшипника в пространстве указанной задней лицо от упомянутого держателя в зависимости от регулировочным механизмом, указанный механизм регулировки в том числе по меньшей мере один коротким ходом гидравлического цилиндра, которое нормально закрыто с фиксированный объем жидкости, по меньшей мере, один гидравлический цилиндр в том числе арматура для изменения указанного фиксированного объема жидкости по мере необходимости, чтобы компенсировать износ подшипников. 2. Расположение опорный подшипник по любому из п.1 , где указанный держатель подшипника включает 'U' образный канал, в котором указанный съемный подшипник будет получена. 3. Подшипник опорная конструкция по любому из п.1 , где указанный механизм регулировки включает в себя две короткий ход гидравлические цилиндры расположенные в длину упомянутого крепежа подшипника. 4. Расположение опорный подшипник по любому из п.3 , где каждый включает в себя гидравлический цилиндр подвергается масленки, через которое вставляется смазка для создания давления указанного цилиндра и регулировать указанного подшипника. 5. Расположение опорный подшипник по любому из п.1 , где указанный подшипник на задней поверхности, обращенной к держателю подшипника, имеющий углубление, которое частично получает по меньшей мере один гидравлический цилиндр. 6. Расположение опорный подшипник по любому из п.5 , где указанный подшипник и упомянутый держатель подшипника сотрудничать в целом окружает указанный механизм регулировки в то время как подвергая заднюю поверхность указанный механизм регулировки через порт в указанной держатель подшипника. 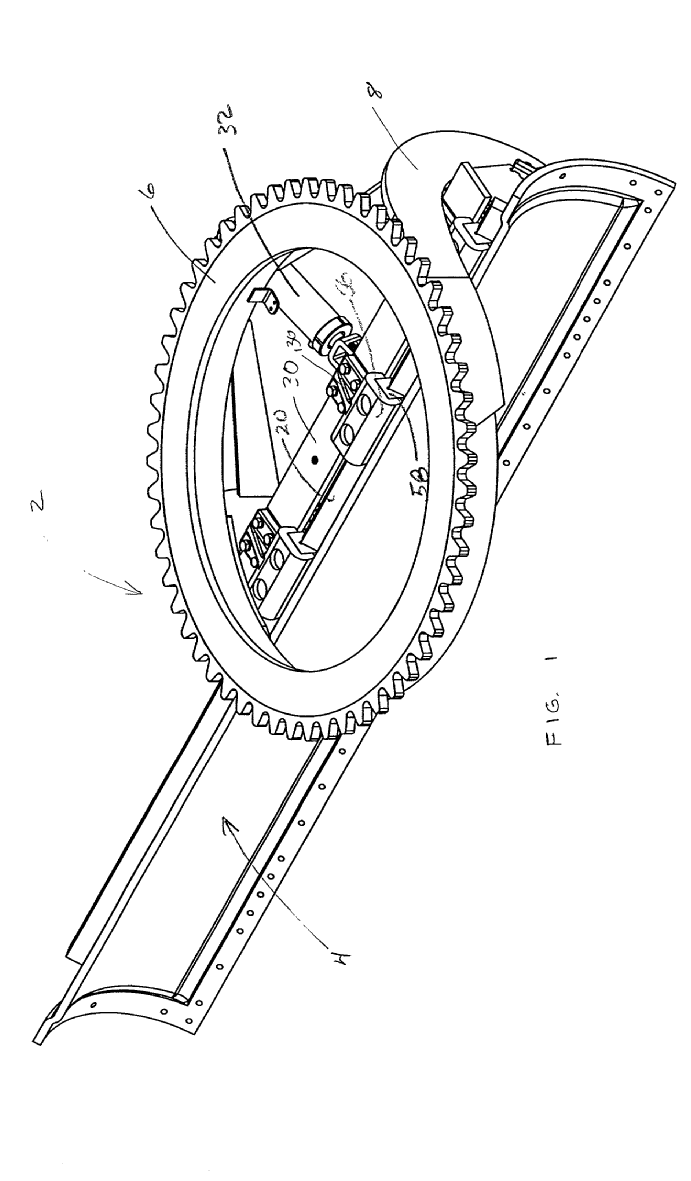 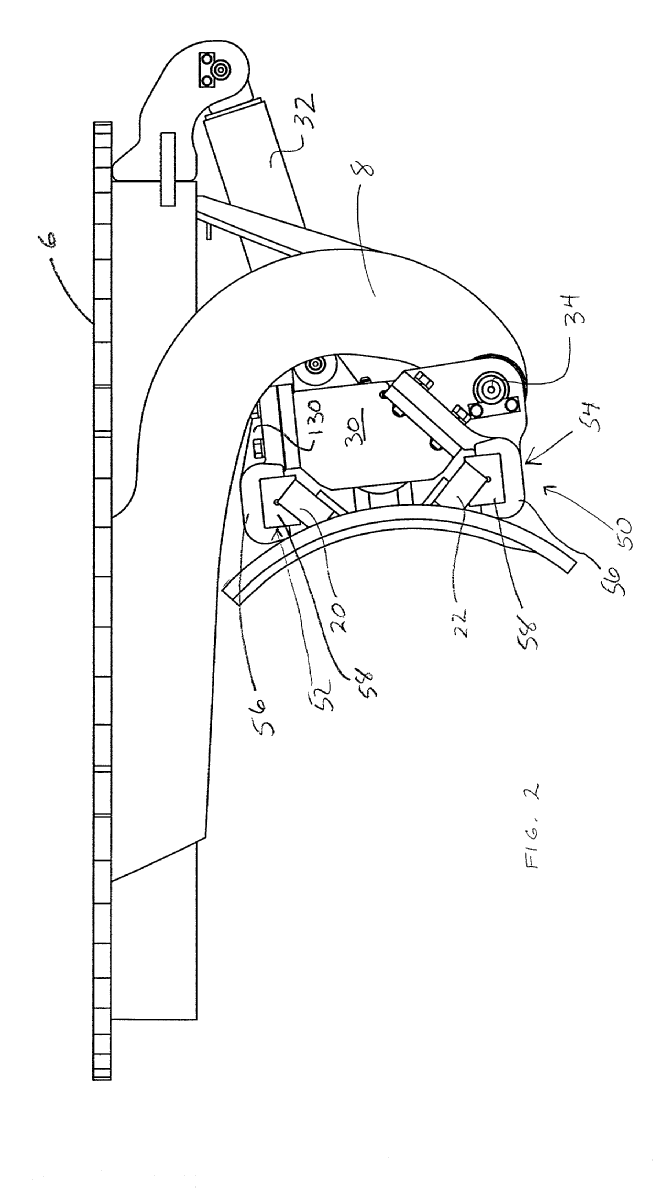 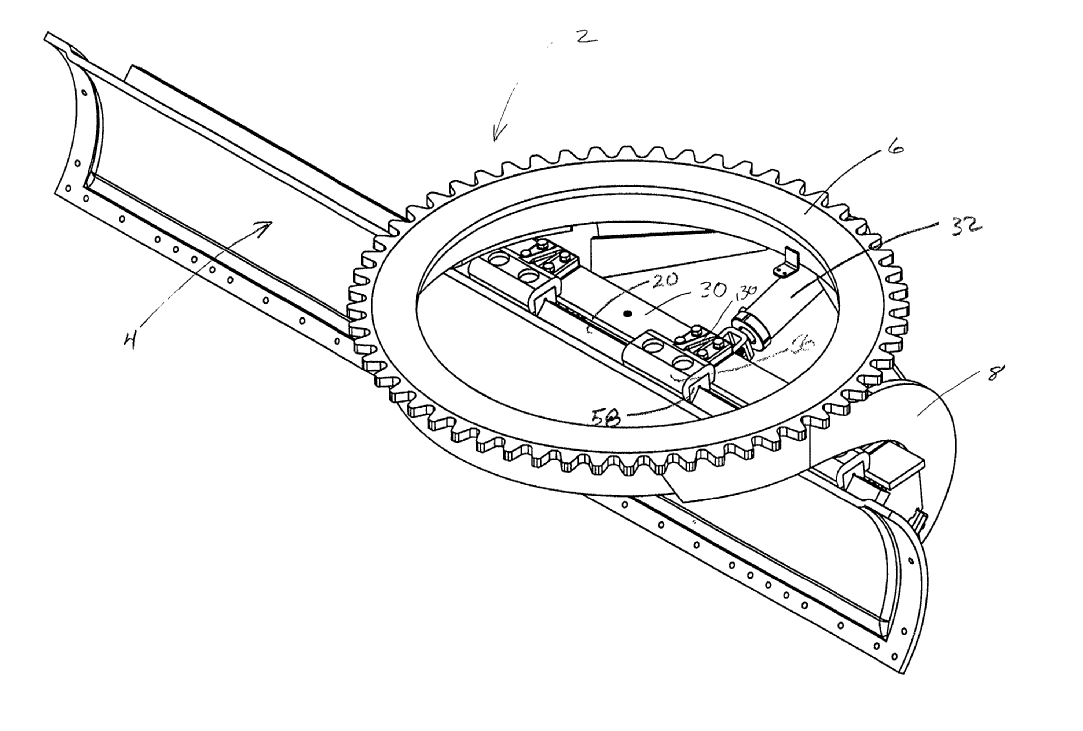 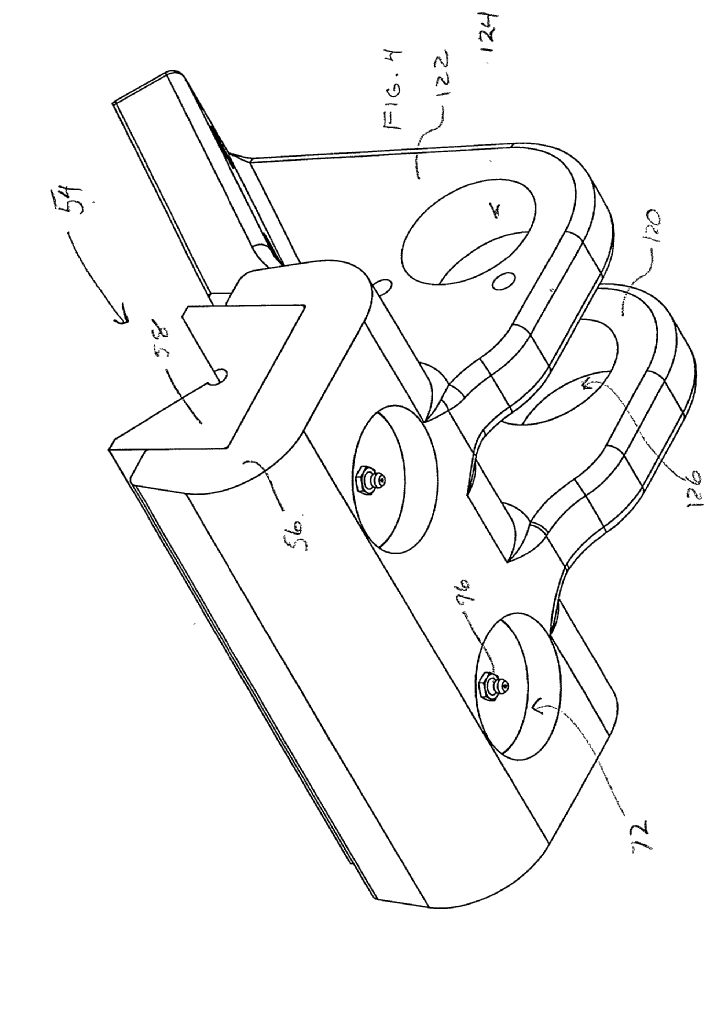 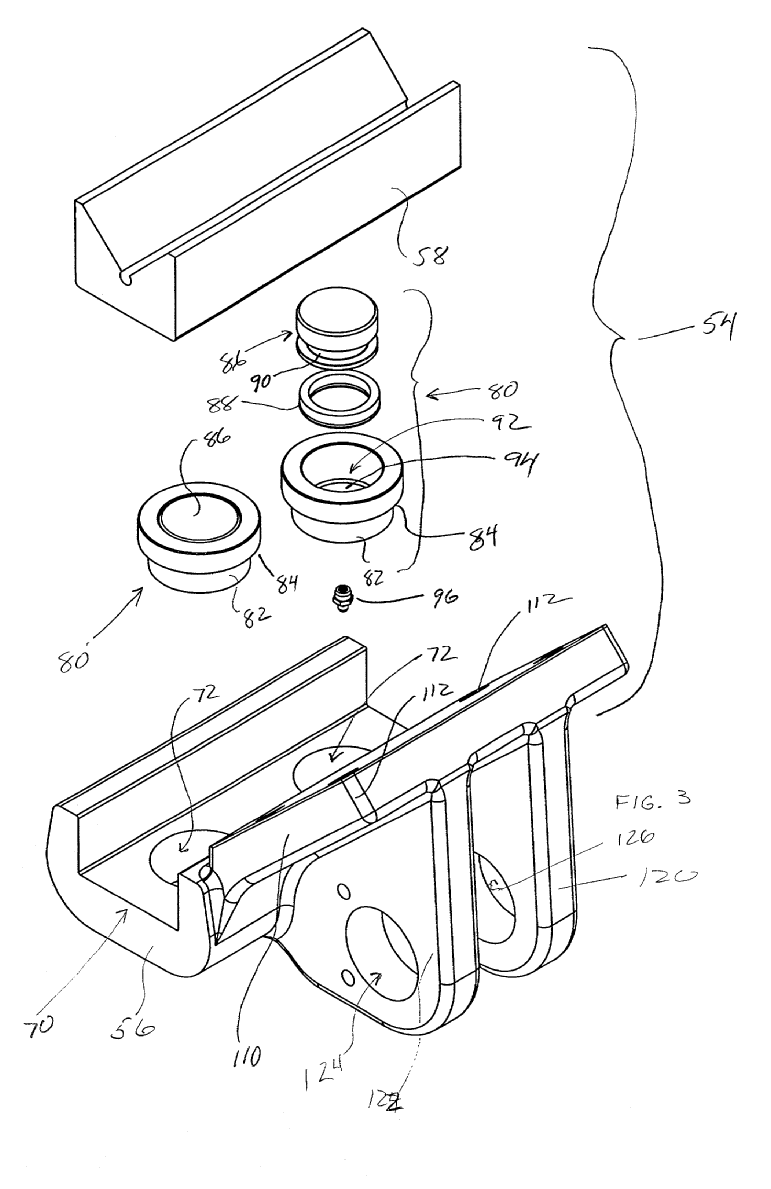 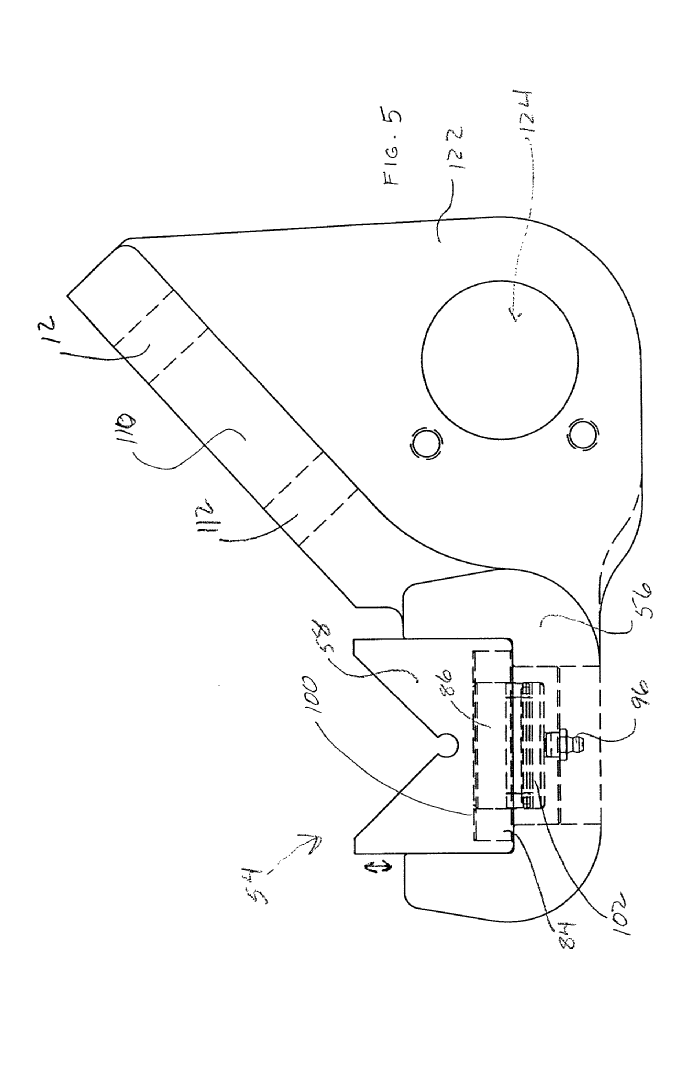 Wipo.int | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||