Тема работы: «Конструирование самодвижущихся устройств на платформе «Точка Роста» и изготовление роботов своими руками в домашни. Реферат Тарасов М. (1). Итоговый проект по физике Конструирование самодвижущихся устройств на платформе Точка Роста и изготовление моделей роботов своими руками в домашних условиях
 Скачать 109.5 Kb. Скачать 109.5 Kb.
|

|
МУНИЦИПАЛЬНОЕ ОБЩЕОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ Некоузская средняя общеобразовательная школа Итоговый проект по физике Конструирование самодвижущихся устройств на платформе «Точка Роста» и изготовление моделей роботов своими руками в домашних условиях Выполнил: Тарасов Марк - ученик 9б класса Проверила: Болотова Ирина Николаевна- учитель физики с. Новый Некоуз, 2022 Содержание I. Введение Конструирование самодвижущихся устройств на платформе «Точка Роста» и изготовление моделей роботов своими руками в домашних условиях 1. История возникновения самодвижущихся устройств и роботов 2. Виды робототехнических конструкторов 3. Работа с робототехническими конструкторами 3.1 Модель лунохода 3.2 Робот-цветосортировщик 3.3 Школьный квадрокоптер 3.4 Робот-рисовальщик. Конструктор ВONDIВON Заключение Источники информации Приложение 1 Приложение 2 I. Введение В современном обществе идет внедрение роботов в нашу жизнь, очень многие процессы заменяются роботами. Сферы применения роботов различны: медицина, строительство, геодезия, метеорология и т.д. Очень многие процессы в жизни, человек уже и не мыслит без робототехнических устройств (мобильных роботов): робот для всевозможных детских и взрослых игрушек, робот – сиделка, робот – нянечка, робота – домработница и т.д. Специалисты обладающие знаниями в этой области очень востребованы. В пятом классе я занимался в Кванториуме г. Рыбинска, где мы собирали роботов и различные механизмы, после чего я создал свою модель робота из подручных средств. РУ-1 – робот-уборщик. Я нашел примерные схемы роботов, доработал их. Проведя анализ и расчеты1, составил схему2 и алгоритм сборки3. В результате работы я выяснил, что в домашних условиях можно создать робота, который будет выполнять определенные задачи, заложенные заранее. А два года спустя в нашей школе были открыты два кабинета платформы «Точка Роста», где можно было продолжать заниматься этой деятельностью. Посещая кружок по физике, мы собирали различные самодвижущиеся устройства на этой платформе. Цель работы: собрать различные самодвижущиеся устройства, изучив программы их изготовления. Гипотеза: изучив основные программы сборки роботов, на основе различных конструкторов можно создать и запрограммировать робота в домашних условиях.Предмет работы: принцип строения и работы различных самодвижущихся устройств конструктора LEGO, ВONDIВON и квадрокоптера DJI Tello. Объект работы: конструкторы LEGO, ВONDIВON и квадрокоптер DJI Tello. В соответствии с целью и гипотезой были поставлены следующие задачи: Познакомиться с историей возникновения самодвижущихся устройств и роботов. Исследовать робототехнические конструкторы LEGO Mindstorms, LEGO Education и ВONDIВON и научиться работать с ними. Изучить программу квадрокоптера DJI Tello и провести мастер-класс для своих одноклассников. Собрать роботов с помощью конструкторов и запрограммировать их. Для достижения поставленных задач будут использоваться такие методы как: изучение и анализ литературы, моделирование, конструирование, программирование. Актуальность данной работы обусловлена широким применением роботов в нашей жизни и на производстве. Развитие робототехники включено в перечень приоритетных направлений технологического развития в сфере информационных технологий, которые определены Правительством РФ. Практическая значимость заключается в том, что материал может быть использован на занятия кружка по работотехнике, на уроках физики и информатики. На защиту выносятся: Презентация, раскрывающая суть данной работы. Модели робота-уборщика, робота-рисовальщика, робота-цветосортировщика, сделанные своими руками. II. Конструирование самодвижущихся устройств на платформе «Точка Роста» и изготовление моделей роботов своими руками в домашних условиях 1. История возникновения самодвижущихся устройств и роботов Ро́бот (чеш. robot, от robota — подневольный труд) — автоматическое устройство. Действуя по заранее заложенной программе и получая информацию о внешнем мире от датчиков (аналогов органов чувств живых организмов), робот самостоятельно осуществляет производственные и иные операции, обычно выполняемые человеком ). При этом робот может как и иметь связь с оператором (получать от него команды), так и действовать автономно. Термин «РОБОТ» изобрели писатель Карел Чапек и его брат Йозеф (термин был впервые использован в пьесе Чапека «Россумские универсальные роботы» в 1921 г. А чертёж человекоподобного робота был сделан Леонардо да Винчи около 1495 года. Записи Леонардо, найденные в 1950-х, содержали детальные чертежи механического рыцаря, способного сидеть, раздвигать руки, двигать головой и открывать забрало Первого робота – андроида, играющего на флейте создал швейцарский часовщик Пьер-Жак Дро.. Современная робототехника сформировалась примерно в 60-х годах XX века, одним из самых важных изобретений стал робот Unimate, созданный Джорджом Диро и Джозефом Энжилберг. Один из первых промышленных роботов, роботов-манипуляторов представлял собой огромную конструкцию, похожую на человеческую руку. Робот был куплен и установлен на сборочном конвейере компании General Motors, чтобы уменьшить вероятность получения травм и смертей на производстве. Современные роботы, созданные на базе самых последних достижений науки и техники, применяются во всех сферах человеческой деятельности. Люди получили верного помощника, способного не только выполнять опасные для жизни человека работы, но и освободить человечество от однообразных рутинных операций. Проблема «самодвижения», т.е. движения за счёт внутренних сил не даёт покоя экспериментаторам с давних времён. Вновь и вновь возникает вопрос: может ли тело внутренними силами привести себя в состояние движения, переместить свой центр тяжести или повернуть себя? В 30-е года ХХ века инженер В.Н.Толчин построил механизм, называемый теперь «Тележкой Толчина». Конструкция была проста – на каркасе с колесами были установлены на рычагах перемещающиеся грузики. В одну сторону они двигались быстрее, в другую медленнее. Для их перемещения был применен обыкновенный пружинный механизм от заводной игрушки. Удивительным было то, что не прикладывая к колесам никакой передачи усилия, тележка тем не менее рывками двигалась в заданном направлении. 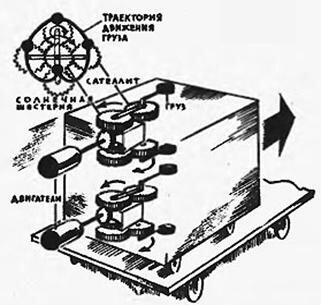 Тележка Толчина. Иллюстрация из журнала «Техника молодежи» Поскольку инерционный движитель противоречит закону сохранения импульса, то современной официальной наукой не признается. Однако это не мешает авторам инерциодидов создавать все новые действующие модели, которые, впрочем, тоже не принимаются научным сообществом. Та же участь постигла магнитные летающие диски английского самоучки Д. Сёрла, подъёмная сила в которых создавалась благодаря возбуждению в нём электростатического поля сверхвысокой напряжённости. Такие устройства успешно испытывались с 1963 по 1978 год, совершив за это время множество управляемых полётов. О них писали газеты и снимались фильмы, но удовлетворительного теоретического объяснения они, как и упомянутые выше модели, не получили. Сегодня эти изобретения подзабыты. 2. Виды робототехнических конструкторов Можно ли создать робота самостоятельно? Что представляют из себя конструкторы для самостоятельной сборки и программирования роботов? Безусловным лидером образовательной робототехники, на мой взгляд, является платформа Lego. Образовательные наборы LEGO Education предназначены для детей разного возраста — от младших школьников до студентов. Конструктор очень прочный, простотой и удобный для сборки. Виды робототехнических конструкторов, с которыми я работал это: LEGO Education ВONDIВON Lego Mindstorms Модель лунохода4 Первый робот, созданный мной в кабинетах «Точка Роста», был собран с помощью конструктора LEGO Education. Образовательные наборы LEGO Education предназначены для детей разного возраста — от младших школьников до студентов. Несмотря на простой функционал, данный робот может найти себе применение, если он будет собран в «натуральную величину». Этот девайс является моделью устройства передвижения, а также перевоза различных грузов. Например, исследователи космоса смогут использовать подобные машины при изучении поверхности небесных тел. Робот-цветосортировщик5 Затем я познакомился с конструктором Lego Mindstorms, основанным на программировании. Этапы создания робота: 1. Определение задачи; 2. Сборка робота; 3. Программирование робота на ПК согласно условиям задачи; 4. Проверка проделанной работы. Было решено собрать робота-цветосортировщика. Если он замечает один из четырёх цветов (красный, синий, зелёный или жёлтый), он называет этот цвет, начинает перемещаться по гусеничной ленте и останавливается в определённом месте. Затем робот возвращается в первоначальное положение, пока он не коснётся кнопки с левой стороны. После этого алгоритм повторяется. Данный робот может помочь людям-дальтоникам. Благодаря встроенным датчикам робот будет распознавать и называть цвета, которые он увидит через камеру. В буквальном смысле, это устройство вернёт людям цветное зрение. Школьный квадрокоптер6 Когда в нашей школе появилась платформа «Точка Роста», я решил начать работу с новым квадрокоптером. Разобравшись с принципом его работы, я провёл для своих одноклассников мастер-класс на одном из занятий по физике. Квадрокоптеры нашли большое применение в нашей жизни. Съёмка кино, изучение аварийных объектов, борьба с преступностью, военная разведка и многое другое. С каждым годом этот список всё увеличивается и увеличивается. Робот-рисовальщик7 Наконец, мой собственный конструктор ВONDIВON, из которого я решил собрать робота-рисовальщика. Главной особенностью данного девайса является его программирование без компьютера. Роль компьютера выполняет жёлтое кодирующее колесо, на которое устанавливаются кнопки. Каждая кнопка, задевая определённые шестерёнки в механизме, заставляет устройство совершать различные действия. Ш. Заключение Подводя итог выше изложенному можно сказать, что люди с древних времен стремились создать себе механизированных помощников, которые могли бы выполнять вместо них тяжелую работу. На сегодняшний день робототехника объединяет широчайший спектр самых передовых технологий и полностью основана на компьютерных технологиях. Я достиг своей цели: изучил работу самодвижущихся устройств в «Точке роста», доказал, что можно собрать своего робота и запрограммировать его. В результате моя гипотеза оказалась верной, цель и задачи проекта выполнены. Также благодаря проделанной работе я прочитал много литературы и узнал много нового. Думаю, что такое занятие развивает изобретательность, творческое мышление и будет весьма полезно. А в ближайшее время я займусь изготовлением модели робота-мойщика окон. Источники информации Роботы. Большая энциклопедия. ООО «Издательство «Э».М.,2017 Дорфман Я.Г. Всемирная история физики. С древнейших времён до конца XVIII века. Изд. 3-е. М.: ЛКИ, 2010. 352 с. ISBN 978-5-382-01091-5. Овсяницкая Л.Ю. Курс программирования робота EV3 в среде Lego Mindstorms EV3 [Текст]: учеб. пособие / Л.Ю. Овсяницкая, Д.Н. Овсяницкий, А.Д. Овсяницкий - 2-е изд., перераб. и доп. – Москва.: Изд-во «Перо», 2016. – 300 с. Филиппов С.А. Основы робототехники на базе конструктора Mindstorms NXT [Электронный ресурс]. https://10pix.ru/istoriya-proishozhdeniya-robotov.html http://robot-russia.ru/2016/07/23/robot-uborshhik-svoimi-rukami/ Приложение 1. Необходимый материал для робота – уборщика. 3 зубные щетки 2 Элемента питания ААА (1,5 В) Отсек для элементов питания 2 электромотора Соединительные провода Выключатель Пластиковое основание Двухсторонний скотч 2 самореза Декоративная панель Скотч 2 ластика Приложение 2. Экономическая карта для робота – уборщика 1) 3 зубных щетки. Цена за 1 шт. – 40 рублей Итого: 3 *40=120 рублей 2) Элементы питания ААА(1,5 В). Цена за 1 шт. – 27 рублей Итого: 2 *27=54 рубля 3) отсек для батареек от старого пульта. Итого -0 рублей 4)Провода из б/у гирлянды. Итого -0 рублей 5) Выключатель и два моторчика из старой детской игрушки. Итого -0 рублей 6) Пластиковое основание из пластиковой панели от ремонта дома. Итого -0 рублей 7) Декоративная панель созданная 3D-ручкой. 5 цветов. Итого -100 рублей 8) 2 ластика. Цена 1 шт. 5 рублей -10 рублей 9) 2 самореза. Цена 1шт. 30 копеек. Итого -2*30=60 коп. 10) Двухсторонний скотч + обычный скотч – 23 рубля Итого – 307 рублей 60 копеек. 1 Приложение 2. 2 Приложение 1. 3 Презентация. Слайд 11 4 Презентация. Слайд 23 5 Презентация. Слайд 26 6 Презентация. Слайд 28 7 Презентация. Слайд 32-33 |