Степанов, С. Практическое программирование Arduino / Степанов С., Накоряков В., Смирнов В.//Радио-Ежегодник 2017. – №34. – С.112-410
Соммер Улли, Программирование микроконтроллерных плат / Соммер Улли - СПб: БХВПетербург, 2018. – 256 с.
Петин В.А. Проекты с использованием контроллера Arduino/ В.А. Петин. – СПб.: БХВПетербург, 2018. – 464 с.
Киреева Э.А Полный справочник по электрооборудованию и электротехнике / Э.А Киреева, С.Н Шерстнев. – М.: КНОРУС, 2017. – 864с.
Виглеб Г. ДАТЧИКИ. Устройство и применение/ Г. Виглеб. – М.: Мир, 1989 – 240с.
Электронный справочник программиста Arduino – URL: https://www.arduinoplus.ru/coding-arduino/ (дата обращения: 24.01.2020). –Текст: электронный.
Бесплатная электронная Интернет – библиотека.: сайт -https://www.litres.ru/ (дата обращения: 24.01.2020). –Текст: электронный.
Безуглов Д.А. Цифровые устройства и микропроцессоры: учеб.пособие: Учебное пособие / Микушин А.В., Сажнев А.М., Сединин В.И. - СПб:БХВ-Петербург, 2017. - 832 с.
ГОСТ РВ 20.39.309-98 Государственный стандарт российской федерации комплексная система общих технических требований аппаратура, приборы, устройства и оборудование военного назначения: дата введения 1998-05-26.
ГОСТ 23592-96 Монтаж электрический радиоэлектронной аппаратуры и приборов. Общие требования к объемному монтажу изделий электронной техники и электротехнических: дата введения 1996-04-12
Проект «Arduino Vive Controller Emulation.» – URL: http://www.cuddleburrito.com/flrnmrr/2016/11/30/arduino-vive-controller-emulation/ (дата обращения: 01.02.2020). –Текст: электронный.
Саймон Монк. Программируем Arduino. Профессиональная работа со скетчами. / Саймон Монк – СПб.: БХВПетербург, 2019. – 256 с.
Shahram Latifi. 17th International Conference on Information Technology–New Generations (ITNG 2020).
Электронный журнал Hindawi – URL: https://www.hindawi.com/journals/js/2020/7296204/ (дата обращения: 13.02.2020). –Текст: электронный.
Электронный журнал IOP Conference Series: Materials Science and Engineering – URL: https://iopscience.iop.org/article/10.1088/1757-899X/740/1/012151/meta (дата обращения: 24.02.2020). –Текст: электронный.
Электронный журнал OSA Publishing – URL: https://www.osapublishing.org/abstract.cfm?uri=OFC-2020-M1A.6 (дата обращения: 27.03.2020). –Текст: электронный.
Электронный журнал ATLANTIS PRESS – URL: https://www.atlantis-press.com/proceedings/iccese-20/125936794 (дата обращения: 30.03.2020). –Текст: электронный.
Электронный журнал ScholarSpace – URL: https://scholarspace.manoa.hawaii.edu/handle/10125/63927 (дата обращения: 07.04.2020). –Текст: электронный.
Katharina Jahn. Information Systems and Neuroscience, 2019.
Электронный журнал ACMDL – URL: https://dl.acm.org/doi/abs/10.1145/3334480.3383067 (дата обращения: 16.04.2020). –Текст: электронный.
Бесплатная электронная Интернет – библиотека – URL: https://arxiv.org/abs/2001.07546 (дата обращения: 24.04.2020). –Текст: электронный.
Журнал International Journal of Human–Computer Interaction, 2020.
Электронный журнал SpringerLink – URL: https://link.springer.com/article/10.1007/s10055-019-00378-w (дата обращения: 28.04.2020). –Текст: электронный.
Электронная Интернет – библиотека – URL: https://journals.sagepub.com/doi/abs/10.1177/002224298905300309 (дата обращения: 29.04.2020). –Текст: электронный.
Электронный журнал ScienceDirect – URL: https://www.sciencedirect.com/science/article/abs/pii/S0169023X97000566 (дата обращения: 01.05.2020). –Текст: электронный.
Электронный журнал IOP – URL: https://iopscience.iop.org/article/10.1088/0004-637X/770/2/103/meta (дата обращения: 03.05.2020). –Текст: электронный.
Электронный журнал Nature – URL: https://www.nature.com/articles/417459a (дата обращения: 07.05.2020). –Текст: электронный.
Электронный журнал Genome Research – URL: https://genome.cshlp.org/content/22/9/1813.short (дата обращения: 13.05.2020). –Текст: электронный.
Электронный журнал PHYSIOLOGICAL REVIEWS – URL: https://genome.cshlp.org/content/22/9/1813.short (дата обращения: 17.05.2020). –Текст: электронный.
Электронный журнал Arthritis & Rheumatology – URL: https://onlinelibrary.wiley.com/doi/full/10.1002/art.11137 (дата обращения: 19.05.2020). –Текст: электронный.
ПРИЛОЖЕНИЯ
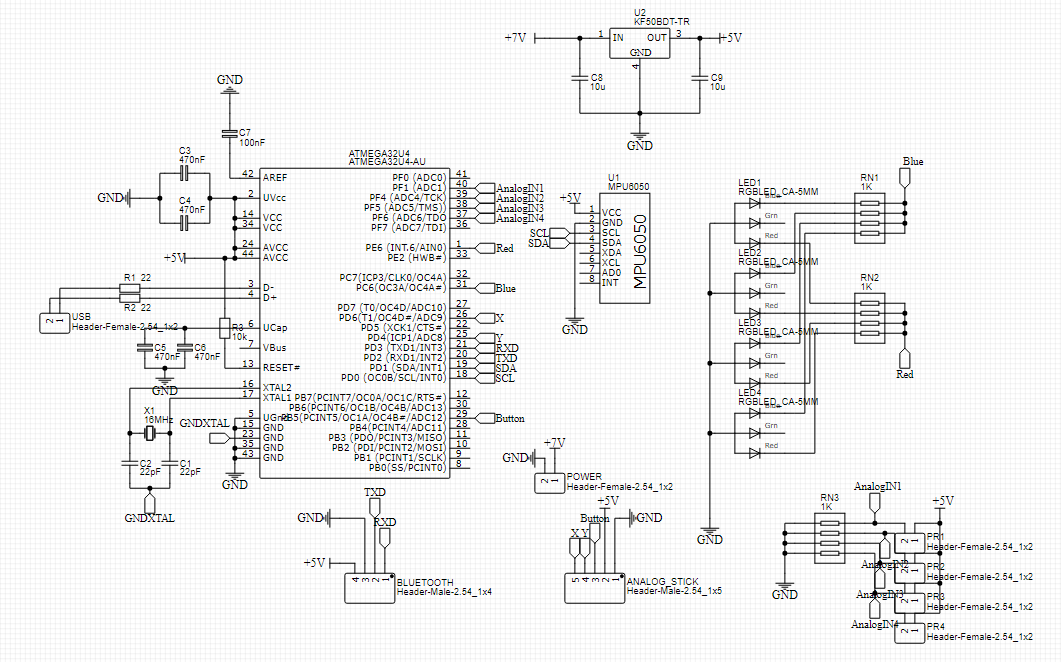
ПРИЛОЖЕНИЕ 1
Принципиальная схема платы
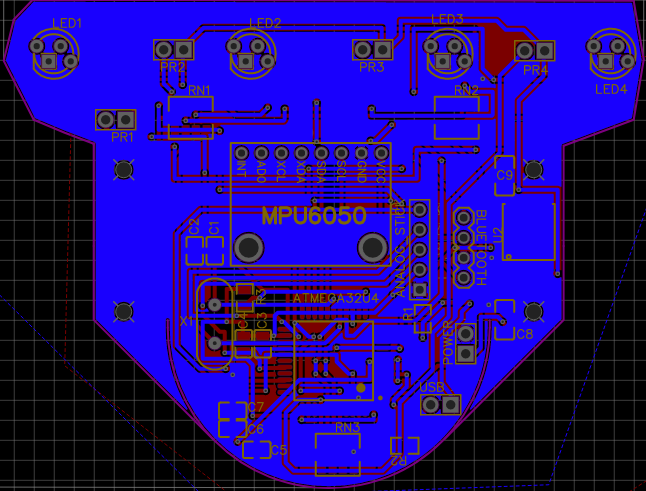
 ПРИЛОЖЕНИЕ 3 Трассировка нижнего слоя печатной платы
 ПРИЛОЖЕНИЕ 4 ПРИЛОЖЕНИЕ 4
Код основного устройства на датчике GY-521
#include "I2Cdev.h"
#include "MPU6050_6Axis_MotionApps20.h"
#include "Wire.h"
#include
#include
#include
int PinRed = 5;
int PinBlue = 7;
int buttonPin = 9;
int PR0 = A4;
int PR1 = A3;
int PR2 = A2;
int PR3 = A1;
int INX = A9;
int INY = A8;
MPU6050 mpu;
uint16_t packetSize;
uint16_t fifoCount;
uint8_t fifoBuffer[64];
Quaternion q;
VectorFloat gravity;
float ypr[3];
float old_mx = -200;
float old_my = -200;
float dx, dy, mx, my;
void setup()
{
Serial.begin(38400);
pinMode(PinRed, OUTPUT);
digitalWrite(PinRed, HIGH);
ПРОДОЛЖЕНИЕ ПРИЛОЖЕНИЯ 4
pinMode(buttonPin, INPUT);
Wire.begin();
Wire.setClock(400000);
mpu.initialize();
mpu.dmpInitialize();
mpu.setDMPEnabled(true);
packetSize = mpu.dmpGetFIFOPacketSize();
}
void loop() {
int buttonState = digitalRead(buttonPin);
if (buttonState == HIGH) {
Serial.println('C');
}
int Key0 = analogRead(PR0);
if (Key0 <= 210) {
Keyboard.print("E");
delay(50);
}
int Key1 = analogRead(PR1);
if (Key1 <= 210) {
Keyboard.print("F");
delay(50);
}
int Key2 = analogRead(PR2);
if (Key2 <= 210) {
Keyboard.print("I");
delay(50);
}
int Key3 = analogRead(PR3);
if (Key3 <= 210) {
Keyboard.print("C");
delay(50);
}
ПРОДОЛЖЕНИЕ ПРИЛОЖЕНИЯ 4
int Stick_X = analogRead(INX);
while (Stick_X < 340) {
Stick_X = analogRead(INX);
Keyboard.print("S");
delay(50);
}
while (Stick_X > 660) {
Stick_X = analogRead(INX);
Keyboard.print("W");
delay(50);
}
int Stick_Y = analogRead(INY);
while (Stick_Y < 340) {
Stick_Y = analogRead(INY);
Keyboard.print("A");
delay(50);
}
while (Stick_Y > 990) {
Stick_Y = analogRead(INY);
Keyboard.print("D");
delay(50);
}
while (fifoCount < packetSize){
fifoCount = mpu.getFIFOCount();
}
if ( fifoCount >= 1024) {
mpu.resetFIFO();
fifoCount = mpu.getFIFOCount();
} else {
while (fifoCount < packetSize) fifoCount = mpu.getFIFOCount();
mpu.getFIFOBytes(fifoBuffer, packetSize);
fifoCount -= packetSize;
mpu.dmpGetQuaternion(&q, fifoBuffer);
ПРОДОЛЖЕНИЕ ПРИЛОЖЕНИЯ 4
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetYawPitchRoll(ypr, &q, &gravity);
mx=ypr[0] * 180/M_PI;
my=ypr[1] * 180/M_PI;
if(old_mx>-200) {
if((old_mx<-100)&&(mx>100)) {
dx=(-180-old_mx)+(mx-180);
}
else if((old_mx>100)&&(mx<-100)) {
dx=(180-old_mx)+(180+mx);
}
else{
dx=mx-old_mx;
}
dy=my-old_my;
Mouse.move(2000/60*dx, -1000/30*dy);
}
old_mx=mx;
old_my=my;
}
}
ПРИЛОЖЕНИЕ 5
Код интерпретатора BNO055
#include
#include
#include
#include
#include
#include
#define BOUNCE_WAIT 10
#define BOUNCE_COUNT 1
#define ACTIVE_BUTTONS 5
int buttonPins[] = {4, 5, 6, 7, 8, 2, 9, 7, 18, 19, 20, 21, 10, 16, 14, 15};
const int xAxis = 18;
const int yAxis = 19;
boolean buttonPressed[16];
Bounce debouncers[16];
int debounceCount[16];
short quatx;
short quaty;
short quatrx;
short quatry;
Adafruit_BNO055 bno = Adafruit_BNO055(55);
#define N (2)
int RXLED = 17;
String inputString = "";
boolean stringComplete = false;
bool hasBNO = true;
int range = 254;
int responseDelay = 5;
int threshold = range / 4;
int center = range / 2;
void setup() {
inputString.reserve(200);
ПРОДОЛЖЕНИЕ ПРИЛОЖЕНИЯ 5
Gamepad.begin();
for (int i = 0; i < ACTIVE_BUTTONS; i++) {
debouncers[i] = Bounce();
debounceCount[i] = 0;
pinMode(buttonPins[i],INPUT_PULLUP);
(debouncers[i]).attach(buttonPins[i]);
(debouncers[i]).interval(BOUNCE_WAIT);
delay(100);
buttonPressed[i] = false;
}
pinMode(RXLED, OUTPUT);
digitalWrite(RXLED, LOW);
if(hasBNO){
if (!bno.begin())
{
Serial.print("Ooops, no BNO055 detected ... Check your wiring or I2C ADDR!");
while (1);
}
delay(1000);
bno.setExtCrystalUse(true);
}
}
void loop() {
if(hasBNO){
imu::Quaternion quat = bno.getQuat();
quatx = (short) ( (int) ( quat.x()*32767 ) );
quaty = (short) ( (int) ( quat.y()*32767 ) );
quatrx = (short) ( (int) ( quat.z()*32767 ) );
quatry = (short) ( (int) ( quat.w()*32767 ) );
Gamepad.xAxis(quatx);
Gamepad.yAxis(quaty);
Gamepad.rxAxis(quatrx);
ПРОДОЛЖЕНИЕ ПРИЛОЖЕНИЯ 5
Gamepad.ryAxis(quatry);
Gamepad.write();
}
for (int j = 0; j < ACTIVE_BUTTONS; j++) {
(debouncers[j]).update();
int value = (debouncers[j]).read();
if ( value == LOW ) {
if(debounceCount[j] == BOUNCE_COUNT && buttonPressed[j] == false) {
if(j==0){
Gamepad.press(1);
}
if(j==1){
Gamepad.press(2);
}
if(j==2){
Gamepad.press(3);
}
if(j==3){
Gamepad.press(4);
}
if(j==4){
Gamepad.press(5);
}
Gamepad.write();
digitalWrite(RXLED, HIGH);
buttonPressed[j] = true;
} else {
if(debounceCount[j] < BOUNCE_COUNT) {
debounceCount[j] = debounceCount[j] + 1;
}
}
} else {
if(debounceCount[j] > 0) {
ПРОДОЛЖЕНИЕ ПРИЛОЖЕНИЯ 5
debounceCount[j] = debounceCount[j] - 1;
} else {
buttonPressed[j] = false;
if(j==0){
Gamepad.release(1);
}
if(j==1){
Gamepad.release(2);
}
if(j==2){
Gamepad.release(3);
}
if(j==3){
Gamepad.release(4);
}
if(j==4){
Gamepad.release(5);
}
Gamepad.write();
digitalWrite(RXLED, LOW);
}
}
}
int8_t xReading = readAxis(xAxis);
int8_t yReading = readAxis(yAxis);
Gamepad.zAxis(map(xReading,-255,255,-255,255));
Gamepad.rzAxis(map(yReading,-255,255,-255,255));
Gamepad.write();
}
void serialEventRun(void) {
if (Serial.available()) serialEvent();
}
void serialEvent() {
while (Serial.available()) {
ПРОДОЛЖЕНИЕ ПРИЛОЖЕНИЯ 5
char inChar = (char)Serial.read();
inputString += inChar;
if(inputString.endsWith("\r") ) {
stringComplete = true;
}
}
}
int readAxis(int thisAxis) {
int reading = analogRead(thisAxis);
reading = map(reading, 0, 1023, 0, range);
int distance = reading - center;
if (abs(distance) < threshold) {
distance = 0;
}
return distance;
}
|
 Скачать 1.31 Mb.
Скачать 1.31 Mb.