Дипломная работа по теме создание VR-перчатки. К дипломному проект Тема Разработка универсального кистевого устройства управления
 Скачать 1.31 Mb. Скачать 1.31 Mb.
|

1.7 Аналоговые датчикиВ качестве основного устройства ввода будет использоваться оптический датчик изгиба из-за того, что обычный датчик изгиба будет слишком дорог и при постоянном использовании быстро выйдет из строя. Поэтому будем использовать параллельно соединённые светодиоды и фоторезисторы, подключённые к аналоговым входам. За счёт эффекта делителя напряжения мы можем получить максимально дешёвый и точный датчик изгиба. На рисунке 15 показан обычный датчик изгиба. 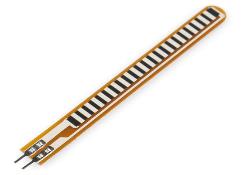 Рисунок 15. Датчик изгиба Но при этом возникает необходимость в подключении ограничивающих резисторах, это необходимо для увеличения срока службы светодиодов и увеличения безотказности. Также в качестве датчика дополнительно будет использоваться аналоговый стик, представляющий из себя 2 переменных резистора последовательно подключённые к другим двум резисторам, тем самым образуя из себя делитель напряжения, передавая на контроллер значение напряжения примерно 0.5 Вольт до 5. Диаграмма изменения напряжения показана на рисунке 16.  Рисунок 16. Датчик изгиба В итоге есть достаточно точный и дешёвый датчик изгиба, но так как он сделан по технологии полупроводниковых диодов, то он ограничен своим ресурсом. Его ресурс можно улучшить, создав ёмкостной датчик изгиба, но для этого нужно больше времени и проведение дополнительных испытаний. Это обязательно будет учтено и добавлено в список того, что нужно модернизировать. На основании изложенной выше информации, получаем теоретическую основу для практического проектирования устройства. Вывод по главе 1. В этой главе были описаны преимущества используемых компонентов и программной среды, а также произведён анализ существующих моделей на рынке. Было выбрано программное обеспечение для разработки и компоненты устройства для устройства. ГЛАВА 2. СПЕЦИАЛЬНАЯ ЧАСТЬ РАЗРАБОТКИ КИСТЕВОГО УСТРОЙСТВА УПРАВЛЕНИЯ2.1 Разработка печатной платыТак как в параграфе 1.3 было решено разрабатывать свою печатную плату то первое, что нужно сделать перед разработкой платы, это создать функциональную схему и структурную схему, исходя из информации, описанной в 1 главе. Результат анализа работы датчиков и выбор платформы показан на рисунках 17 и 18. [4]  Рисунок 17. Функциональная схема Как видно на схеме датчики передают данные о своём состоянии в микроконтроллер, микроконтроллер передаёт их на модуль передачи данных далее эти данные в символьном виде приходят на модуль приёмника. Затем эти данные поступают в интерпретатор, который переводит их в числовые значения, с которыми уже работает компьютер или устройство.  Рисунок 18. Структурная схема На структурной схеме представлена связь между различными модулями. На этой схемы видно, что модуль BNO055 и датчики изгиба передают свои данные в микроконтроллер он проводит различные вычисления и передаёт их в Bluetooth модуль HC-05 он в свою очередь сопряжён по протоколу беспроводной передачи данных Bluetooth 4.2 имеющий спецификацию IEEE 802.15.1 имеющий максимальную скорость передачи данных в 25 мегабит в секунду с другим модулем HC-05, который подключен к интерпретатору команд после него данные поступают на персональный компьютер или иное устройство, безопасность же обеспечивается сопряжением по MAC-адресу без возможности на уровне пользователя его изменить. Далее необходимо определить количество электропроводящих слоёв, толщины дорожек и толщины текстолита. Также необходимо выбрать сам текстолит. Для наших нужд достаточно стандартного, двухслойного стеклотекстолита FR-4, толщиной 1.6 миллиметров. Для увеличения ремонтопригодности будем использовать модульную структуру, для этого необходимо учитывать разъёмы для припаивания модулей на печатную плату. В качестве САПР будет использоваться кроссплатформенная веб-ориентированная среда автоматизации проектирования электроники EasyEDA. [5] 2.1.1 Разработка электрической принципиальной схемыДля обеспечения корректной работы устройства необходимо правильно составить электрическую-принципиальную схему. Для задания нужной частоты работы разместить кварцевый резонатор частотой 16 мега Герц, он обозначен на схеме как X1 и необходим для задачи тактовой частоты микроконтроллера. Для упрощения конструкции было решено применять сборки резисторов на 1 КОм, они обозначены как RN, будут использоваться в качестве постоянного резистора в сборке с датчиком изгиба, тем самым будут значительно меняться параметры напряжения, поступающего на аналоговые выводы. Это увеличит точность работы. Разъёмы для подключения фоторезисторов обозначены как PH. Разъём Bluetooth модуля обозначен как BLUETOOTH, он подключен к пинам, отвечающим за последовательный порт. Разъём аналогово стика подписан как ANALOG_STICK, он также подключён к аналоговым пинам и отвечает за дополнительный способ ввода, ещё в нём присутствует кнопка, отвечающая за состояние большого пальца, положение которого могло бы гарантировать минимум 2 состояния сжатия у большого пальца. Разъём для подключения сборки аккумуляторов обозначен как POWER, он подключён к стабилизатору напряжения, обозначенному как U2, понижает 7 вольт выходного напряжения до 5, без потери параметра тока. Модуль гироскопа обозначен как U1, он подключён по шине I2C, которая обеспечивает связь модуля и микроконтроллера. Разъём для прошивки обозначен как USB, он используется только для прошивки устройства и подключен к USB-контроллеру, встроенному в микроконтроллер, все остальные обозначения использованы по ГОСТ. Итоговый результат показан в приложение 1 2.1.2 Трассировка верхнего и нижнего слоя печатной платыНа верхнем слое печатной платы будут расположены как элементы питания, так и сигнальные дорожки. Это связано с тем, что в этом дипломном проекте не используются высокоточные устройства, из-за чего влияние помех минимально. Также для уменьшения габаритов платы будет использованы элементы поверхностного монтажа, обозначаемые SMD, основные типоразмеры компонентов это: 0805 и 1206. Трассировка выполнена в соответствии с правилами DRC, а значит сконструирована верно. На нижнем слое не планируется установка компонентов и выполняет он в основном переходные функции. Это сделано для того, чтобы не использовать перемычки, тем самым уменьшая количество мест пайки и шанс брака. Итоговый вид платы в САПР, можно посмотреть в приложениях 2 и 3. Готовую плату можно посмотреть на рисунке 19.  Рисунок 19. Печатная плата Печатная плата для разрабатываемого устройства была представлена на картинке выше. |