Дипломная работа по теме создание VR-перчатки. К дипломному проект Тема Разработка универсального кистевого устройства управления
 Скачать 1.31 Mb. Скачать 1.31 Mb.
|

2.6 Сборка и отладка устройстваВ ходе конструирования была создана 3D версия корпуса, с готовыми отверстиями под датчики, креплениями печатной платы и технологическими отверстиями для разработчиков. Пока происходит изготовление корпуса, необходимо распаять все необходимые компоненты и радиодетали на печатную плату. 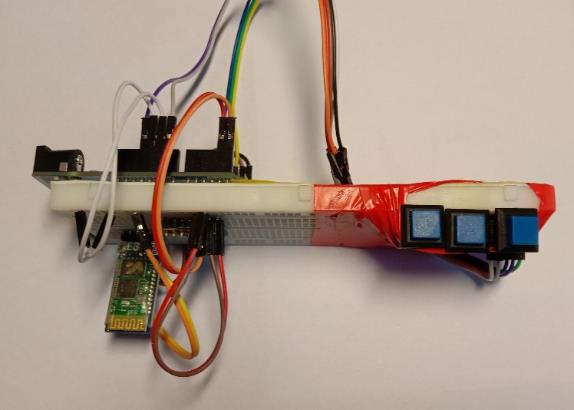 Рисунок 22. Фото отладочного прототипа После этого необходимо установить компоненты в корпус и провести тестирование устройства. Эскиз готового устройства можно увидеть на рисунке 23. 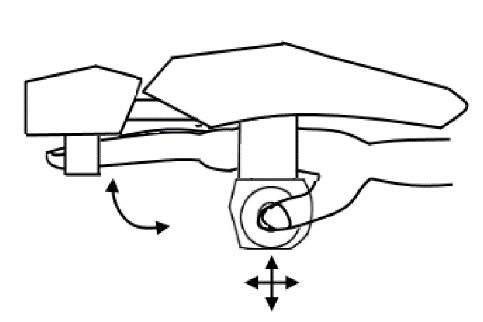 Рисунок 23. Эскиз готового устройства Во время разработки устройства возник ряд проблем, которые необходимо было решать. При получении первых образцов печатной платы были обнаружены проблемы, связанные с реализацией питания и реализации разъёма для прошивки контроллера. Это было решено путём модернизации системы питания и замены стандартного USB, на разъём пинов 2.54 миллиметра. После сборки рабочего образца и отладки были выявлены серьёзные проблемы в датчике MPU6050. Они выражаются в том, что микроконтроллер помимо сбора данных датчика MPU6050 он проводит опрос датчиков изгиба и отправку данных на Bluetooth модуль из-за этого происходит накопление ошибок из-за чего пользоваться устройством невозможно, в связи с этим пришлось перейти на датчик BNO055 и полному переделыванию кода, но из-за того, что оба датчика используют шину I2C, не нужно было переделывать печатную плату. Так как на данный момент нет конкретного драйвера для устройства, то пришлось использовать открытый драйвер на основе Razer Hydra, то есть на данный момент устройство «Притворяется» контроллером Razer Hydra. В целом устройство работает исправно, несмотря на возникшие трудности. 2.8 Возможности и перспективы по модернизацииДля повышения качества и точности устройства нужно будет реализовать седеющие планы: разработать и внедрить емкостной датчик изгиба. Это значительно повысит качество считывания положения пальцев; перевод кода из Arduino C в Assembler. Это необходимо, так как при длительном использовании устройство начинает работать не точно. Это связанно с тем, что происходит частичное накопление ошибок, этот шаг значительно ускорит работу программы и нивелирует воздействие ошибок; создание специального драйвера, для более широкой эксплуатации. Это необходимо для более комфортного использования пользователем; замена Bluetooth модуля на радиомодуль 2.4 ГГц. Так как у радиомодуля значительно лучше качество, сигнала то использование отдельного радиоканала значительно повысит качество сигнала и обратную реакцию; создание корпуса из литого пластика или алюминия. Это необходимо для улучшенной прочности конструкции и увеличению долговечности; модернизация печатных плат. Это необходимо сделать, так как на существующей плате существуют мелкие проблемы, которые нужно решить на аппаратном уровне; создание оптического протокола сопряжения устройств на основе инфракрасных лучей. Это необходимо для создания семейства продуктов, которыми можно было бы управлять с помощью данного устройства; разработка более дешёвого шлема VR, совместимого с устройством. Это поможет привлечь большую аудиторию к сфере виртуальной реальности и более широкому распространению устройства; создать программное обеспечение для изменения заводских параметров устройства. Это необходимо для того, чтобы конечному пользователю было приятнее использовать данное устройство. 2.9 Руководство пользователяДля начала работы с устройством убедитесь в отсутствии внешних повреждений. Подключите интерпретатор команд к персональному компьютеру или на специальную плату адаптер для управляемого устройства. В таблицах с 2 по 5 указаны основные команды для управления в различных режимах работы устройства. Таблица 2 Таблица управления ПК в режиме HID-устройства
Таблица 3 Таблица команд для управления роботом
Таблица 4 Таблица управления в VR-пространстве для правой руки
Таблица 5 Таблица управления в VR-пространстве для левой руки
Вывод по главе 2. Итогом этой главы является разработка электрической, структурной и функциональной схем, а также разработка печатной платы и программной части. Кроме этого было составлено руководство пользователя и проведены испытания и отладка. Можно сказать, что устройство спроектировано на хорошем уровне и на данный момент выполняет свои задачи. |