потери. Потери. Компенсация мощность электроснабжение измерительный
 Скачать 1.22 Mb. Скачать 1.22 Mb.
|

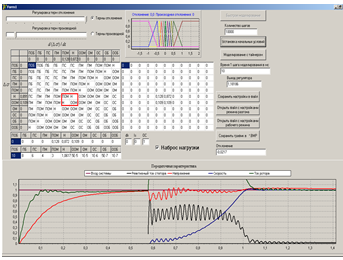 Рис. 2.11 – Осциллограмма процесса СК и пуска асинхронного двигателя Результаты моделирования подтверждают работоспособность системы автоматического регулирования напряжения статора СК с нечетким регулятором напряжения. 1. Замена ПИД-регулятора в системе напряжения СК переменного тока нечетким регулятором исключает запаздывание в системе регулирования и обеспечивает форсирующие свойства с целью уменьшения времени восстановления напряжения при включении асинхронной нагрузки. 2. Предлагаемый приближенный алгоритм позволяет модифицировать систему нечеткого вывода применительно к нелинейным функциям принадлежности дефаззификатора, который обеспечивает высокое быстродействие и заданную точностью по отношению к известным алгоритмам. 3. Результаты моделирования подтверждают работоспособность нечеткого регулятора напряжения применительно к СК средней мощности. 2.4 Адаптивное нечеткое управление синхронного компенсатора с применением нейронной технологии Рассмотрим адаптивное нечеткое управление синхронного компенсатора с применением нейронной технологии. Источники реактивной мощности предназначены для реализации баланса реактивной мощности в электроэнергетической системе. Они обеспечивают генерирование и потребление реактивной мощности. Основным параметром регулирования источника реактивной мощности является напряжение в точке его подключения, где реактивная мощность нагрузки является неконтролируемым возмущением, вызывающим изменение напряжения узла нагрузки. Источник реактивной мощности включается параллельно к узлу нагрузки. Индуктивный ток нагрузки (ток намагничивания), необходимый для создания номинальных магнитных потоков в асинхронных двигателях, обеспечивает у них постоянство потокосцеплений. Источник реактивной мощности, выполненный на базе СК, в отличие от косинусных конденсаторов обеспечивают плавное, но медленное регулирование напряжения до  % номинального значения. СК это электрическая машина, работающая в режиме холостого хода с трех фазным неподвижным статором и вращающимся ротором с беличьей клеткой, на котором находится обмотка возбуждения, подключенная к регулируемому источнику постоянного тока. СК с обесточенной обмоткой возбуждения потребляет реактивную мощность из сети для создания вращающего электромагнитного поля и активную мощность для компенсации трения в подшипниках, которой можно пренебречь. При увеличении тока возбуждения ротора СК переходит из режима генерирования реактивной (индуктивный) мощности в режим генерирования реактивный (емкостной) мощности. Статическая характеристика СК является U-образной, показанная на рисунке 2.12. % номинального значения. СК это электрическая машина, работающая в режиме холостого хода с трех фазным неподвижным статором и вращающимся ротором с беличьей клеткой, на котором находится обмотка возбуждения, подключенная к регулируемому источнику постоянного тока. СК с обесточенной обмоткой возбуждения потребляет реактивную мощность из сети для создания вращающего электромагнитного поля и активную мощность для компенсации трения в подшипниках, которой можно пренебречь. При увеличении тока возбуждения ротора СК переходит из режима генерирования реактивной (индуктивный) мощности в режим генерирования реактивный (емкостной) мощности. Статическая характеристика СК является U-образной, показанная на рисунке 2.12. 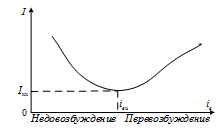 Рис. 2.12 – U-образные характеристики СК Переток мощности в линии при отключенном СК и возбужденном СК приведен на рисунке 2.13. Минимально длительно допустимая реактивная мощность СК должна быть не ниже 50% номинальной мощности, так как возможна потеря статической устойчивости СК. Достоинством СК является положительный регулирующий эффект, т.е. способность увеличивать генерируемую реактивную (емкостную) мощность при снижении напряжения и реактивную (индуктивную) мощность при превышении напряжения на шинах узла в пределах  . .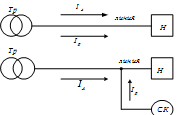 Рис. 2.13 – Процессы, протекающие в линии: а) до компенсации и б) после компенсации реактивной мощности Учитывая отсутствие математического описания объекта, которое определяется количеством включенных в данный момент асинхронных двигателей с их текущей нагрузкой и других нелинейных элементов применять классические законы управления данным объектом не представляется возможным. Предлагается применить нечеткое управление с применением пропорционально-интегрального регулятора, где пропорциональную часть закона реализовать адаптивной нечеткой компонентой регулятора. На рисунке 2.14 приведен адаптивный нечеткий регулятор напряжения. Регулятор включают адаптивный фаззификатор и блоки активационных сигмоидных асимметричных функций. В адаптивных фаззификаторах использованы сигмоидные функции принадлежности (ФП)  . . Аналитические выражения сигмоидных ФП адаптивного нейронного фаззификатора регулятора напряжения СК представлены в (2.28), (2.29), (2.30), (2.31) [32]:  ; (2.28) ; (2.28) ; (2.29) ; (2.29)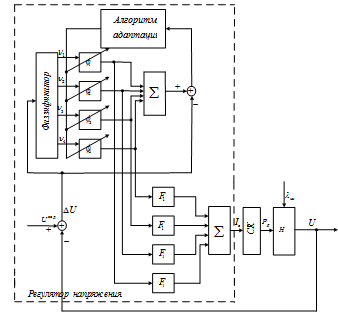 Рис. 2.14 – САР регулирования напряжения на шинах узла нагрузки: СК – синхронный компенсатор;  - сигмоидные функции - сигмоидные функции ; (2.30) ; (2.30) , (2.31) , (2.31)где  – параметры смещения сигмоидных ФП; – параметры смещения сигмоидных ФП; вес суммарного сигнала на входе сигмоидных ФП. вес суммарного сигнала на входе сигмоидных ФП. – активизированные степени принадлежности фаззификатора синглетоном, синхронно связанным с входом – активизированные степени принадлежности фаззификатора синглетоном, синхронно связанным с входом  ; ;Имена терм: ОС – отрицательное среднее, ОМ – отрицательное малое, ПМ – положительное малое, ПС – положительное среднее. Входной сигнал фаззификатора нечеткого регулятора напряжения СК несет информацию об управлении и возмущениях нагрузки (реактивная мощность нагрузки). Учитывая, что размещение терм нейронного фаззификатора производилось только с учетом предельных значений переменной , необходимо в дальнейшем его адаптировать с помощью нейрона с последовательным обучением согласно рекуррентной формуле [33]: , при , при  , (2.32) , (2.32) где  – последующий шаг j+1-итерации; – последующий шаг j+1-итерации;  – предыдущий шаг j-итерации; – предыдущий шаг j-итерации;  – дискретная форма j- итерации; – дискретная форма j- итерации;  – оценка выхода модели; – оценка выхода модели;  – ошибка в оценке ; – измеряемая функция (текущее напряжение); Т – транспонирование; C – скорость настройки коэффициетов. – ошибка в оценке ; – измеряемая функция (текущее напряжение); Т – транспонирование; C – скорость настройки коэффициетов.Метод последовательного обучения от известных [33] отличается быстродействием и возможностью использования как линейных, так и нелинейных терм. Произведения активизированных степеней принадлежности фаззификатора синглетоном, синхронно связанным с входом (рис. 2.14), подаются на входы функций активации  . Сигмоидные функции активации , усиливая слабый сигнал на входе и ослабляя сильный сигнал, формируют сигнал управления током возбуждения СК. . Сигмоидные функции активации , усиливая слабый сигнал на входе и ослабляя сильный сигнал, формируют сигнал управления током возбуждения СК. Введение адаптивного нейрона в регулятор напряжения корректирует термы фаззификатора в нейронном исполнении к текущим значениям отклонения как в статике, так и динамике. Отсутствие каких-то предварительных настроек, кроме выбора числа и размещений сигмоидных функций принадлежности в интервале в регуляторе напряжения делает его актуальными и способствует к широкому применению на практике. Адаптивный нечеткий регулятор напряжения есть астатический регулятор и исключает статическую ошибку. Введение интеграла в закон управления дополнительно обеспечивает подавление помех на входе контура управления возбуждением СК.Выводы по главе 1. Замена ПИД-регулятора в системе напряжения СК переменного тока нечетким регулятором исключает запаздывание в системе регулирования и обеспечивает форсирующие свойства с целью уменьшения времени восстановления напряжения при включении асинхронной нагрузки. 2. Разработано адаптивное нечеткое управление СК с применением нейронной технологии. 3. Предлагаемый приближенный алгоритм позволяет модифицировать систему нечеткого вывода применительно к нелинейным функциям принадлежности дефаззификатора, который обеспечивает высокое быстродействие и заданную точностью по отношению к известным алгоритмам. 4. Результаты моделирования подтверждают работоспособность нечеткого регулятора напряжения применительно к СК средней мощности. Глава 3. Разработка метода и алгоритма управления режимом реактивной мощности при асимметрии системы электроснабжения промышленного предприятия Использование УКРМ позволяет существенно повысить технические показатели электроснабжения предприятия, а именно, повысить качество электрической энергии, уменьшить потери активной энергии при ее передаче от источника к приемнику, уменьшить оплату за отпущенную электроэнергию. 3.1 Разработка математической модели датчика асимметрии устройства для системы управления УКРМ Измеритель УКРМ представляет собой фазометр, который предназначен для измерения сдвига фаз между двумя периодическими сигналами. Принцип работы фазометра показан на рисунке 3.1. 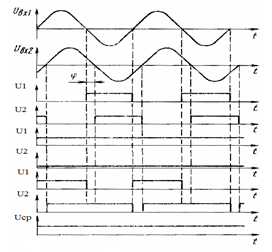 Рис. 3.1 – Временные диаграммы работы фазометра Входные сигналы преобразуются в прямоугольные импульсы, а затем выполняется их суммирование и в результате получают величину угла сдвига фаз φ. Предложим метод определение угла сдвига фаз между током и напряжением электрической сети промышленного предприятия, используя аналоговую модель измерителя. От системы электроснабжения через трансформатор тока, установленного в фазе, на измеритель поступают два синусоидальных сигнала: мгновенные ток i и напряжение u сети (см. рис. 3.2).  , (3.1) , (3.1)где Um – максимальная амплитуда напряжения фазы сети, В; Im – максимальная амплитуда тока одноименной фазы сети, А; Ψu – сдвиг фазы по напряжению; Ψi – сдвиг фазы по току. 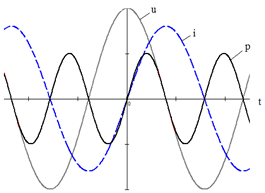 Рис. 3.2 – Синусоидальные сигналы напряжения и тока одноименной фазы промышленной сети Угол сдвига фаз можно определить из мгновенной мощности сети, которая равна:  (3.2) (3.2)Значение сдвига фаз между током и напряжения равно:  (3.3) (3.3)Решая задачу нахождения угла сдвига фаз в сети однофазного тока, возникает проблема определения амплитудных значений тока и напряжения. Ниже представлена математическая модель, позволяющая определить амплитуду синусоидального сигнала А·sin(ωt): Выполним умножение исследуемого сигнала «А·sin(ωt)» на «B·sin(ωt)» и на «В·cos(ωt)»:  (3.4) (3.4)2. Выполним интегрирование полученных выражений:  (3.5) (3.5)Выполним смещение на период T:  (3.6) (3.6)4. Выполним суммирование выражений в скобках:  (3.7) (3.7)5. Получившиеся выражения возведем в квадрат:  (3.8) (3.8)6. Выполнив сложение выражений, получим:  (3.9) (3.9)7. Корень квадратный:  (3.10) (3.10)где ω = 2π∙f –циклическая частота, рад/с, f = 50 – частота сети, Гц. Если амплитуду вспомогательных сигналов принять В = 100, то в результате получим значение искомой амплитуды исследуемого сигнала А. Зная амплитуды тока и напряжения можно выразить cosφ из мгновенной мощности сети. 3.2 Выбор программы и моделирование измерительной части конденсаторной установки компенсации реактивной мощности Проектирование любой системы управления в общем случае представляет собой сложную задачу, успешное решение которой зависит от правильного выбора всех ее составляющих. Большинство задач сводиться, как правило, к решению систем уравнений [29, 30, 31]. При создании системы управления, этапом предваряющим разработку технической реализации системы является исследование работоспособности системы методом моделирования. Для упрощения процедуры моделирования и многовариантного анализа системы применяются проблемно-ориентированные пакеты прикладных программ. В настоящее время наибольшее распространение получила система инженерных и научных вычислений MatLab с пакетом расширения визуального моделирования Simulink [31]. Выполним моделирование предложенной математической модели измерительной части конденсаторной УКРМ в программе MatLab с пакетом расширения визуального моделирования Simulink. На рис.е 3.3 представлена схема определения амплитуды синусоидального сигнала «311∙sin (ωt)». Обозначения: – Sine Wave – исследуемый синусоидальный сигнал сети «311∙sin (ωt)»; – 100∙cos(ωt) и 100∙sin(ωt) – вспомогательные синусоидальные сигналы; – Product1 и Product2 – элемент умножения сигналов; – Integ1 и Integ2 – элементы интегрирования сигналов; – Т1 иТ2 – элементы смещения сигналов на период Т=1/f; – Sum, Sum1 и Sum2 – элементы суммирования сигналов; – Fcn, Fcn1 и Fcn2 – функции математических операций; – Display – элемент вывода информации; – Scope – осциллограф. На рисунке 3.4 представлена схема измерительной части системы управления мощностью батарей статических конденсаторов. Обозначения: – Sine Wave и Sine Wave1 – синусоидальные сигналы тока Im∙sin(ωt+ψi) и напряжения Um∙sin(ωt+ψu); – fs – частота сети переменного тока, Гц; – Ramp – элемент времени, с; – Subsystem(amplitude I) – подсистема определения амплитуды тока; – Subsystem(amplitude U) – подсистема определения амплитуды напряжения; – Subsystem1 и Subsystem – подсистема определения сдвига по фазе тока ψi и напряжения ψu. 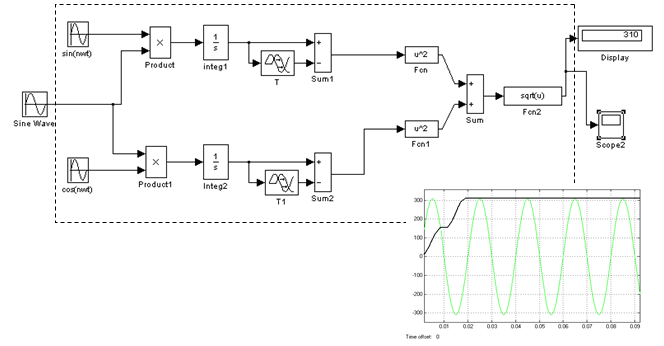 Рис. 3.3 – Схема определения амплитуды синусоидального сигнала «311.4∙sin (ωt)» 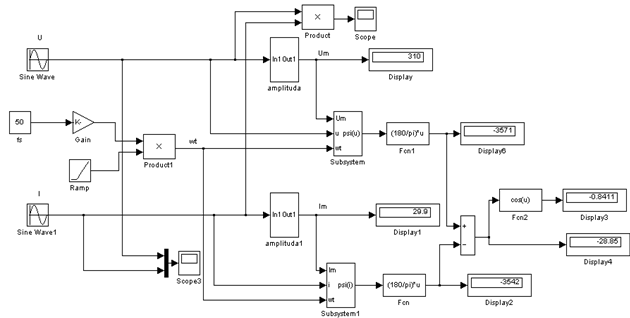 Рис. 3.4 – Схема измерительной части системы управления мощностью конденсаторных батарей 3.3 Разработка алгоритма управления мощностью конденсаторной установки при несимметричной нагрузке по фазам Зачастую от одной точки общего присоединения получают питание как трехфазные, так и одно- или двухфазные приемники электрической энергии. Из-за несимметричного потребления мощностей по фазам возникают фазные токи разной величины в цепях питания этих потребителей, что приводит к возникновению несимметрии напряжения в точке общего присоединения, отрицательно влияющей на работу многих электроприемников. Несимметрию напряжения характеризуют коэффициенты несимметрии по обратной  и нулевой и нулевой  последовательности. ГОСТ 32144-2013 установил следующие значения этих показателей: К2U = 2%, K0U = 4%. последовательности. ГОСТ 32144-2013 установил следующие значения этих показателей: К2U = 2%, K0U = 4%.Наиболее чувствительная к несимметрии напряжения электродвигательная нагрузка, обладающая малым сопротивлением обратной последовательности. Различие напряжения по фазам приводит к увеличению пульсаций выпрямленного напряжения. На рисунках 3.5-3.7 приведены графики измерений несимметрии фазных напряжений, несимметрии межфазных напряжений и коэффициентов несимметрии прямой и обратной последовательностей для предприятия ОАО «Армавирский электротехнический завод». 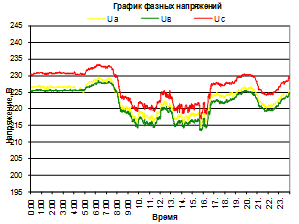 Рис. 3.5 – График фазных напряжений 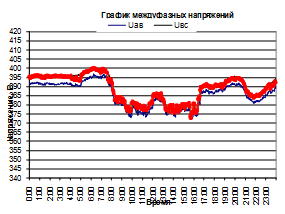 Рис. 3.6 – График линейных (междуфазных) напряжений 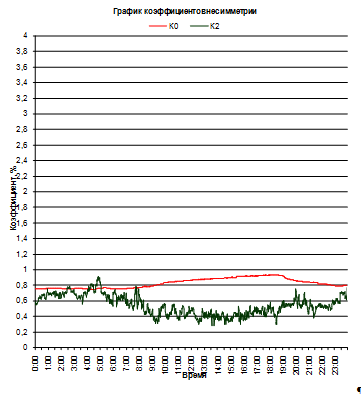 Рис. 3.7 – График коэффициентов несимметрии нулевой и обратной последовательностей Графики построены по данным измерений качества электрической энергии, замеры выполнялись специализированной электротехнической лабораторией Армавирского механико-технологического института. Полученные графики показателей качества электрической энергии имеют общий характер для ряда предприятий города Армавира. Из анализа графиков можно сделать вывод, что при групповой нагрузке несимметрия напряжения по обратной и нулевой последовательности присутствует всегда, она возникает из-за несимметричного распределения нагрузок по фазам, хоть и находится в требуемых пределах. Несимметричная нагрузка по фазам приводит к снижению эффекта компенсации реактивной мощности. Использование конденсаторных установок с регулированием мощности батарей статических конденсаторов по току одной фазы приводит к неполной компенсации или перекомпенсации реактивной мощности в других фазах. В таблицу 3.1 занесены данные измерений параметров сети групповой нагрузки цеха промышленного предприятия ОАО «Армавирский электротехнический завод». Замеры выполнялись с промежутком 30 минут. На рисунке 3.8 и рисунке 3.9 показаны графики токов и напряжения при несимметричной нагрузке соответственно. Несимметричный режим нагрузок возникает из-за наличия большого количества однофазных приемников. Таблица 3.1 – Данные измерений параметров электрической сети цеха
|