Автоматические регуляторы импульсного действия. Контрольная работа по дисциплине Введение в специальность Проверил Магнитогорск, 2015 содержание
 Скачать 89.56 Kb. Скачать 89.56 Kb.
|

|
Министерство образования и науки Российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Магнитогорский государственный технический университет им. Г. И. Носова» КОНТРОЛЬНАЯ РАБОТА по дисциплине «Введение в специальность» Выполнил: Проверил: Магнитогорск, 2015 СОДЕРЖАНИЕ ВВЕДЕНИЕ…………………………………………………………………….3 Автоматические регуляторы импульсного действия………………………..4 ЗАКЛЮЧЕНИЕ………………………………………………………………...8 Список использованных источников………………………………………....9 ВВЕДЕНИЕ Автоматическое управление широко применяется во многих технических и биотехнических системах для выполнения операций, не осуществимых человеком в связи с необходимостью переработки большого количества информации в ограниченное время, для повышения производительности труда, качества и точности регулирования, освобождения человека от управления системами, функционирующими в условиях относительной недоступности или опасных для здоровья. Цель управления тем или иным образом связывается с изменением во времени регулируемой (управляемой) величины — выходной величины управляемого объекта. Для осуществления цели управления, с учётом особенностей управляемых объектов различной природы и специфики отдельных классов систем, организуется воздействие на управляющие органы объекта — управляющее воздействие. Оно предназначено также для компенсации эффекта внешних возмущающих воздействий, стремящихся нарушить требуемое поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Совокупность взаимодействующих управляющего устройства и управляемого объекта образует систему автоматического управления (САУ). В современных системах автоматического управления системы автоматического регулирования являются подсистемами САУ и их применяют для регулирования различных параметров при управлении объектом или процессом. Принцип действия всякой системы автоматического регулирования (САР) заключается в том, чтобы обнаруживать отклонения регулируемых величин, характеризующих работу объекта или протекание процесса от требуемого режима и при этом воздействовать на объект или процесс так, чтобы устранять эти отклонения. Для осуществления автоматического регулирования к регулируемому объекту подключается автоматический регулятор, вырабатывающий управляющее воздействие на регулирующий орган. Это управляющее воздействие вырабатывается регулятором в зависимости от разности между текущим значением регулируемой величины (температуры, давления, уровня жидкости и т. д.), измеряемой датчиком, и желаемым её значением, устанавливаемым задатчиком. Регулируемый объект и автоматический регулятор вместе образуют систему автоматического регулирования. Основным признаком САР, является наличие главной обратной связи, по которой регулятор контролирует значение регулируемого параметра. 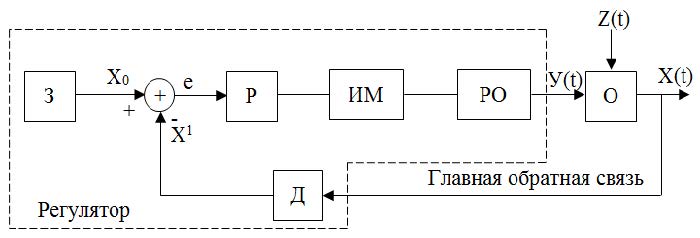 Рисунок 1 – Функциональная схема САР З – задатчик, для установки заданного значения параметра X0; Д – датчик (термопара, терморезистор, датчик уровня, скорости и др. для разных систем); Р – регулятор; ИМ – исполнительный механизм (эл. мотор с редуктором, пневмоцилиндры и др.); РО – регулирующий орган (кран, вентиль, заслонка и др.); О – объект регулирования (печь, эл. мотор, резервуар и др.); У – регулирующее (управляющее) воздействие; Z – помеха (возмущение); Х – регулируемый параметр; X1– сигнал на выходе датчика; е = X1- X0 - ошибка, возникает при отклонении параметра от задания; X0 – заданное значение регулируемого (управляемого) параметра может быть постоянным X0 или изменяемым (Ut). Сигнал с задатчика может быть: постоянным X0 = const. для поддержания постоянства регулируемого параметра температуры, давления, уровня жидкости и т. д. (системы стабилизации); может изменяться во времени U(t) по определённой программе (программное регулирование); может изменяться во времени U(t) в соответствии с измеряемым внешним процессом (следящее регулирование). Автоматические регуляторы импульсного действия Промышленностью выпускается большое количество различных автоматических регуляторов, предназначенных для регулирования режима работы котельных установок (температуры, давления, расхода, уровня, состава вещества и пр.). Наибольшее распространение в промышленности получили стабилизирующие автоматические регуляторы непрерывного действия и релейные, реагирующие на отклонение регулируемой величины и использующие для воздействия на исполнительный механизм электрическую энергию или энергию сжатого воздуха. В современных регуляторах закон регулирования формируется, как правило, в соответствующих устройствах обратной связи, за исключением интегрального регулятора, который не имеет дополнительной обратной связи. Регулятор импульсный – автоматический регулятор прерывистого действия, выходной сигнал (управляющее воздействие) которого имеет характер модулированной последовательности импульсов. Необходимым элементом импульсного регулятора является импульсный элемент (модулятор), осуществляющий модуляцию выходной импульсной последовательности в соответствии с величиной сигнала ошибки. В зависимости от вида импульсной модуляции различают амплитудно-, широтно- и частотно-импульсные регуляторы. Импульсный характер управления облегчает решение ряда технологических проблем, возникающих при разработке автоматических регуляторов, и позволяет создавать регулирующие устройства, обладающие существенными конструктивными и эксплуатационными преимуществами. Одним из главных преимуществ импульсного регулятора является то, что в них с помощью простых и экономичных технических средств можно разрешить противоречие между точностью и мощностью управляющих сигналов. При непрерывном характере управления первичный измерительный прибор (магнитоэлектрический гальванометр, логометр, гироскоп и т.п.) постоянно соединен с датчиком-преобразователем, который преобразует показания прибора в мощный сигнал, управляющий работой исполнительного механизма. Датчик является дополнительной нагрузкой на подвижную систему прибора, снижающий точность его показаний. В импульсном регуляторе имеется возможность подключать датчик к первичному прибору лишь на время действия управляющего импульса. На это время подвижная система измерительного прибора фиксируется в том положении, в котором она находилась перед появлением импульса, так что точность показаний прибора не ухудшается. Существенным преимуществом регуляторов с амплитудно- и широтно-импульсной модуляцией (АИМ, ШИМ) является возможность осуществлять многоканальное регулирование. При этом один импульсный регулятор управляет работой нескольких объектов управления ОУ-1, ОУ-2,…,ОУ-N (рисунок 2, а) за счет временного разделения каналов регулирования, осуществляемого импульсными элементами ИЭ-1, ИЭ-2,…,ИЭ-N, работающих с одинаковыми или кратными периодами повторения Т, но сдвинутых по фазе на величину ∆Т (рисунок 2, а и б). 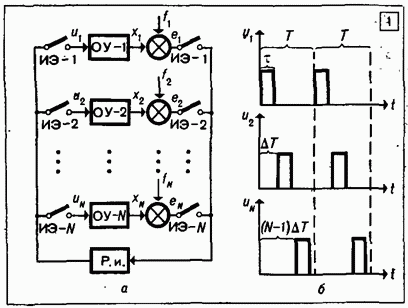 Рисунок 2 – Многоканальная импульсная САР: а – структурная схема; б - диаграмма работы импульсных элементов; xi – регулируемые величины; еi – сигналы ошибок; ui – управляющие воздействия. Основным преимуществом импульсных регуляторов с частотно- и широтно-импульсной модуляцией (ЧИМ и ШИМ) является сочетание высокого качества регулирования с конструктивной простотой и надежностью, характерными для релейных систем. Высокое качество регулирования обеспечивается здесь линеаризующим действием ЧИМ или ШИМ, благодаря которому динамические характеристики импульсного регулятора приближаются к характеристикам линейных регуляторов. В то же время релейный характер выходного (управляющего) сигнала таких регуляторов позволяет применять простые и надежные исполнительные механизмы с релейным управлением: асинхронные двигатели с короткозамкнутым ротором, электрогидравлические или электропневматические приводы, соленоидные клапаны, шаговые двигатели и т.п. В качестве примера на рисунке 3 изображена блок-схема простейшего частотно-импульсного регулятора. Сигнал ошибки e(t), усиленный усилителем напряжения (УН), поступает на интегрирующий RC-фильтр. Сигнал после фильтра, усиленный усилителем мощности (УМ), подается на реле РУ, управляющее работой исполнительного механизма (ИМ) и реле времени (РВ). РВ, срабатывая с небольшой временной задержкой ∆t, разряжает конденсатор С. Это приводит к возврату РУ и остановке ИМ. В результате на выходе РУ появляются прямоугольные импульсы с постоянной длительностью ∆t и с частотой, приблизительно пропорциональной сигналу ошибки e(t). По динамическим свойствам такой импульсный регулятор близок к простейшему линейному астатическому регулятору, а по конструктивной простоте и надежности – к трехпозиционному релейному регулятору. 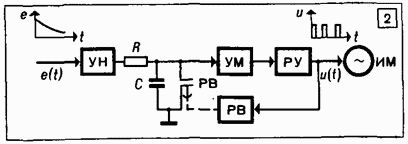 Рисунок 3 – Блок-схема частотно-импульсного модулятора Импульсный способ передачи информации обладает повышенной помехозащищенностью. Поэтому импульсные регуляторы применяют в системах автоматического управления, содержащих проводные или радиотехнические каналы связи. Примерами таких систем являются радиолокационные станции сопровождения, системы телеуправления промышленными объектами и т.п. В электроэнергетике большое распространение получили регуляторы напряжения, частоты и активной мощности с ШИМ и ЧИМ. В СССР выпускался большой ассортимент устройств для одно- и многоканального импульсного и цифрового регулирования типа МИР-63, пневматические обегающие устройства типов УМО-8 и УМО-16, предназначенные для 8- и 16-канального импульсного регулирования и выпускающиеся в составе системы «СТАРТ», машины для централизованного контроля и многоканального цифрового регулирования типов «ЭЛРУ», «Зенит», «Цикл-2», «АМУР», «МАРС-200Р» и др. Импульсные регуляторы вместе со специальными логико-вычислительными устройствами позволяют создавать системы экстремального регулирования, предназначенные для автоматического подержания максимального (минимального) значения регулируемой величины. Примерами экстремальных импульсных регуляторов являются частотно-импульсный экстремальный регулятор «ЭРА-1» и экстремальные пневматические регуляторы серии АРС (система «СТАРТ»). ЗАКЛЮЧЕНИЕ Совершенствование технологии и повышение производительности труда во всех отраслях народного хозяйства относятся к важнейшим задачам технического прогресса нашего общества. Решение этих задач возможно лишь при широком внедрении систем автоматического регулирования и управления как отдельными объектами, так и производством, отраслью и всем народным хозяйством в целом. Научно-техническая революция, вызванная созданием цифровых вычислительных машин, сказалась на развитии многих отраслей науки и техники. Особо сильному влиянию подверглись теория и практика автоматического регулирования и управления объектами и совокупностями объектов как в гражданской, так и в военной технике. Применение цифровой вычислительной техники открывает большие возможности при управлении такими сложными устройствами и системами, как прокатные станы, домны, бумагоделательные машины, поточные линии, подвижные объекты (самолеты, ракеты, космические корабли и др.), автоматизированные системы управления производством, железнодорожным транспортом, воздушным движением и т.п. Список использованных источников: Шандров, Б.В. Технические средства автоматизации Текст: учебник для студ. высш. учеб. заведений / Б.В. Шандров, А.Д. Чудаков. – М.: Издательский центр «Академия», 2007. – 368 с. – ISBN: 978-5-7695-3624-3. Ткачук, Ю.Н. Технические средства автоматизации полиграфического производства Текст : учеб. пособие / Ю.Н. Ткачук, Ю.В. Щербина.— Моск. гос. ун-т печати. — М. : МГУП — 2010. — 230 с. - ISBN 978-5-8122-1114-1. Клюев, А.С. Наладка средств автоматизации и автоматических систем регулирования: Справочное пособие / А. С. Клюев, А. Т. Лебедев, С. А. Клюев, А. Г. Товарное; Под ред. А. С. Клюева. —2-е изд., перераб. и доп.- М.: Альянс, 2009.- 368 с: ил. - ISBN: 5-903034-84-5 978-5-903034-84-0 Каганов, В.И. Компьютерный анализ импульсной системы автоматического регулирования [Текст] / В.И. Каганов, С.В. Терещенко // Вестник Воронежского института МВД России. – 2011. - №2. – С. 6-12. – ISSN 2071-3584. Пурро В. Автоматизация процессов [Электронный ресурс]. – Режим доступа: http://opiobjektid.tptlive.ee/Automatiseerimine/index.html. |