электропривод. Контрольная_электропривод. Контрольная работа по курсу автоматизированный электропривод выполнил студент v курса группы тз513
 Скачать 460.5 Kb. Скачать 460.5 Kb.
|

|
Министерство образования и науки РФ Курганский государственный университет кафедра Автоматизации производственных процессов и производств КОНТРОЛЬНАЯ РАБОТА по курсу «АВТОМАТИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД» выполнил студент V курса группы ТЗ-513 Медведев Алексей Леонидович шифр 361007 Курган 2010 СОДЕРЖАНИЕИ  сходные данные 3 сходные данные 3П  ринципиальная и структурные схемы двигателя 3 ринципиальная и структурные схемы двигателя 3 Передаточные функции двигателя с  расчётами их параметров 4 расчётами их параметров 4Расчётные и экспериментальные механические и  регулировочные характеристики 6 регулировочные характеристики 6Ч  астотные характеристики и формулы для их расчёта 8 астотные характеристики и формулы для их расчёта 8Графики динамических характеристик электродвигателя для номинальных значений и  значений в соответствии с таблицей 1 12 значений в соответствии с таблицей 1 12С  писок литературы 14 писок литературы 14 | ||||||||||||||||||||||||||||||||||||||||||||||

| Тип двигателя | Pн, кВт | Кu | Кф | КR | КJ | КM | Uн, В | nн, об/мин | КПД, % | Сопротивление обмоток, Ом | мГн | кг*м2 | |
| якоря | доп.полюсов | ||||||||||||
| 2ПФ132 | 11,0 | 0,5 | 0,7 | 2,0 | 1,8 | 1,8 | 220 | 3000 | 85,5 | 0,08 | 0,066 | 1,8 | 0,048 |
2. Принципиальная и структурная схема электрического двигателя

Рис.1 Схема электрическая принципиальная
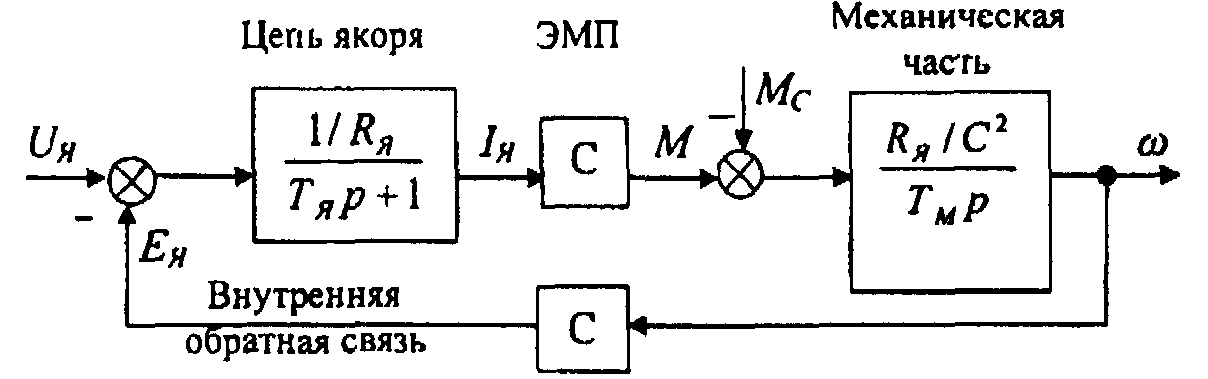
Рис. 2. Структурная схема ЭД постоянного тока независимого возбуждения
3. Передаточные функции двигателя с расчётами их параметров
Потребляемые из сети:
мощность
Р= Рн / ηн = 11000 / 0,855 = 12865,5 Вт
номинальный ток
Iн= Р/ Uн= 12865,5 / 220 = 58,48 A, Iн = Iян
Угловая скорость вращения якоря при номинальной нагрузке:
ωн = 2nн / 60 =nн / 30= 3,14*000 / 30 = 314,1 рад/с
Момент, развиваемый двигателем при номинальной скорости вращения якоря:
Мн = Рн / ωн = 11000 / 314,1 = 35 Н*м
Постоянный для данной машины конструктивный коэффициент:
с = Мн/Iян = 35 / 58,48= 0,6 с*В/рад
Угловая скорость вращения якоря при идеальном холостом ходе:
ω0 = Uн/ с = 220 / 0,6 = 366,7 рад/с
Противо-Э.Д.С., индуктируемая в обмотке якоря при номинальной скорости его вращения:
Eн = сωн = 0,6*314,1 = 188,46 В
Сопротивление якорной цепи:
Rяц=Rя+Rдп+ Rко, получаем
Rяц = Rя+Rдп+ Rко =0,08+0,066+Rко=0,539 Ом, Rко=0,393 Ом
Приведённый к валу двигателя момент инерции механизма:
Jпр = KJ*Jдв = 1,8*0,048 = 0,0864 кг*м2
Суммарный момент инерции вращающихся масс, приведенный к валу двигателя:
J = Jдв + Jпр = 0,048 + 0,0864 = 0,1344 кг*м2
Коэффициенты передачи двигателя:
по управляющему напряжению
по возмущающему воздействию
Постоянные времени:
электромагнитная якорной цепи
Тя = LяΣ/ R = 1,8 / (0,539*1000)(переводим мГн в Гн) = 0,003339 c
электромеханическая
Тм = J*R/c2=J*Kдв = 0,1344*1,497 = 0,20119 с
Передаточные функции линейной модели двигателя, связывающие изменения скорости и тока с изменениями напряжения и момента нагрузки, равны соответственно:
Полученные результаты вычислений занесем в таблицу 2.
Параметры ЭД постоянного тока независимого возбуждения
при номинальном режиме работы
таблица 2
| Номинальный ток | Iн = 58,48 А |
| Номинальный момент | Мн = 35 Н*м |
| Постоянная ЭД постоянного тока независимого возбуждения | с = 0,6 с*В/рад |
| Скорость вращения идеального холостого хода | ω0 = 366,7 рад/с |
| Коэфф. передачи по управляющ. напряжению | |
| Коэфф. передачи по возмущающ. воздействию | |
| Электромагнитная постоянная цепи якоря | Тя = 0,003339 с |
| Электромеханическая постоянная двигателя | Тм = 0,20119 с |
4. Расчётные и экспериментальные механические и
регулировочные характеристики
Механическая характеристика двигателя при номинальном напряжении (U=UH) и номинальном потоке Фв,=Фвн, а так же при отсутствии добавочных сопротивлений в цепи якоря называется естественной (на графике данному режиму соответствует функция ω(M)). Характеристики, полученные варьированием U1,ФВ, rдоб искусственными.
Механическая характеристика двигателя постоянного тока описывается уравнением:
При введении добавочного сопротивления rдоб скорость вращения якоря двигателя при холостом ходе не изменяется, но происходит снижение жесткости механической характеристики. При номинальном моменте:
На графике данному режиму соответствует функция ωR(M).
Уменьшение потока возбуждения приводит к увеличению скорости идеального холостого хода и уменьшению пускового момента Мп, ток короткого замыкания при этом не изменяется. При ослабленном потоке и том же вращающем моменте Мн ток в цепи якоря возрастёт:
Противо-Э.Д.С., индуктируемая в обмотке якоря при ослабленном потоке уменьшиться:
ЕФ = Uн – R*IяФ = 220 – 44,91 = 175,09 В.
Скорость вращения якоря двигателя, работающего при ослабленном потоке в режиме холостого хода:
На графике данному режиму соответствует функция ωФ(M).
При изменении напряжения пропорционально изменяется скорость идеального холостого хода, а жесткость механических характеристик остается постоянной. Скорость вращения якоря двигателя, работающего при пониженном напряжении и номинальном моменте:
при холостом ходе:
На графике данному режиму соответствует функция ωU(M).
Механические характеристики (естественные и искусственные) ω = f (M)
Регулируя момент сопротивления в формуле:
мы видим, что при Мс=0, т.е. при холостом ходе двигателя (на графике данному режиму соответствует функция ωМс1(U)), с увеличением напряжения обороты двигателя возрастают. При приложении к валу двигателя момента Мс=1,8Мн (на графике данному режиму соответствует функция ωМс2(U)), двигатель находится в тормозном режиме (
график располагается ниже графика холостого хода на величину ∆ω. При равных напряжениях получаем:
∆ω=ωМс1(U)- ωМс2(U)=
Регулировочные характеристики ω = f (U)
Частотные характеристики и формулы для их расчёта
W(jω), равная отношению выходного сигнала к входному при изменении входного сигнала по гармоническому закону, называется частотной передаточной функцией. Она может быть получена путем простой замены p на jω в выражении W(p).
W(jω) есть комплексная функция, поэтому:
где P(
Для нашей передаточной функции по управляющему воздействию:
где
после замены p на jω получаем:
делаем преобразование, умножаем числитель и знаменатель на сопряженную знаменателю комплексную величину:
 т.е.
т.е. по полученным данным строим АФЧХ:
Логарифмическая амплитудная ЧХ (ЛАЧХ) L(
ЛАЧХ получают из первого слагаемого, которое из соображений масштабирования умножается на 20, и используют не натуральный логарифм, а десятичный, то есть L(
По оси абсцисс откладывается частота ω в логарифмическом масштабе. То есть единичным промежуткам по оси абсцисс соответствует изменение ω в 10 раз. Такой интервал называется декадой. Так как lg(0) = -
Для ЛАЧХ получаем:
ЛАЧХ
ЛФЧХ, получаемая из второго слагаемого, отличается от ФЧХ только масштабом по оси
ЛФЧХ
Частотные характеристики для параметров в соответствии с таблицей 1
Повышение сопротивления.
При введении добавочного сопротивления изменяются постоянные времени, то есть инерционность системы:
ТмR = J*2*R/c2=2*J*Kдв =2* 0,1344*1,497 = 0,40238 с,
Также имеет место повышение фазного сдвига системы по сравнению с исходным. На графике ЛАЧХ данному режиму соответствует функция Lr(ω), ЛФЧХ - функция фr(ω).
Уменьшение магнитного потока.
При ослаблении поля посредством уменьшения магнитного потока увеличиваются коэффициент усиления
и увеличивается электромеханическая постоянная времени, что повышает соответствующую инерционность системы:
Тм = J*R/(0,7*c)2= 0,1344*0,539/0,422=1,497 = 0,41 с
На графике ЛАЧХ данному режиму соответствует функция LF(ω), ЛФЧХ - функция фF(ω).
На ЛАЧХ для обоих способов изменения параметров (сопротивления и магнитного потока) наблюдается уменьшение быстродействия системы по сравнению с исходным состоянием.
Графики ЛАЧХ и ЛФЧХ для данных режимов приведены ниже.
ЛАЧХ
ЛФЧХ
При изменении напряжения и момента сопротивления частотные характеристики не изменяются, т. к. это не влияет на постоянные времени.
6. Графики динамических характеристик электродвигателя для
номинальных значений и значений в соответствии с табл. 1
Переходные характеристики изменения скорости и тока при нормальных параметрах ДПТ
Современное решение уравнений:
приводит к дифференциальному уравнению второго порядка:
Где ωс- скорость, соответствующая по механической характеристике статическому моменту Мс.
Так как в нашем случае Тм>4Тя , то корни уравнения характеристического уравнения:
вещественные и отрицательные:
При скачкообразном изменении напряжения якоря переходный процесс носит апериодический характер:
Изменение тока для действительных корней:
где Iкз =Uя/r- ток короткого замыкания (ток, который протекает через неподвижный двигатель), Iс – статический ток при номинальном режиме работы двигателя.
СПИСОК ЛИТЕРАТУРЫ
Ключев В.И. Теория электропривода: Учебник для вузов. – М.:- Энергоатомиздат, 1985-560с.
Лебединский Б.П. Расчет статических и динамических характеристик электродвигателей постоянного тока независимого возбуждения: Методические указания. - Курган: КГУ, 1996.
Михайлов О.П.Автоматизированный электропривод станков и промышленных роботов: Учебник для вузов.- М.:Машиностроение, 1990-304с.
Онищенко Г.Б. Электрический привод. Учебник для вузов – М.: РАСХН. 2003.-320 с., ил.