контрольная. Контрольная. Контрольная работа Содержание
 Скачать 198.65 Kb. Скачать 198.65 Kb.
|

|
МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ Федеральное государственное бюджетное образовательное учреждение высшего образования «Ивановский государственный политехнический университет» Кафедра мехатроники и радиоэлектроники  КОНТРОЛЬНЯА РАБОТА по дисциплине Программирование и автоматизация в технических системах Студент: ФИО Группа: АТППз-41 Номер зачётной книжки: 111111 Проверил: ассистент кафедры МиРЭ, И.П. Горнаков Сдан на проверку «__»______2022 г. Допущен к защите «__»______2022 г. Защищен «__»______2022 г. Работа защищена ______________ Оценка ______________ Иваново 2022 Контрольная работа СодержаниеИсходные данные 3 1. Описание системы 3 2. Исследование системы с ПД-регулятором 5 3. Исследование системы с ПИД-регулятором 8 Код в Scilab 11 Исходные данныеВариант № 15 Таблица коэффициентов
1. Описание системыИсследуется система управления судном по курсу, структурная схема которой показана на рисунке. 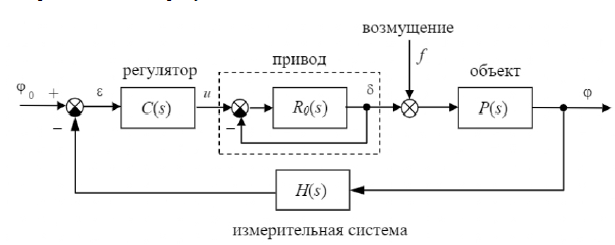 Рис. 1. Структурная схема системы стабилизации Движение судна описывается линейной математической моделью в виде передаточной функции:  Привод моделируется как интегрирующее звено, охваченное единичной отрицательной обратной связью, так что его передаточная функция равна:  Измерительное устройство (гирокомпас) моделируется как апериодическое звено с передаточной функцией:  2. Исследование системы с ПД-регуляторомПередаточная функция ПД-регулятора:  Модель Xcos системы с ПД-регулятором приведена на рисунке 2. 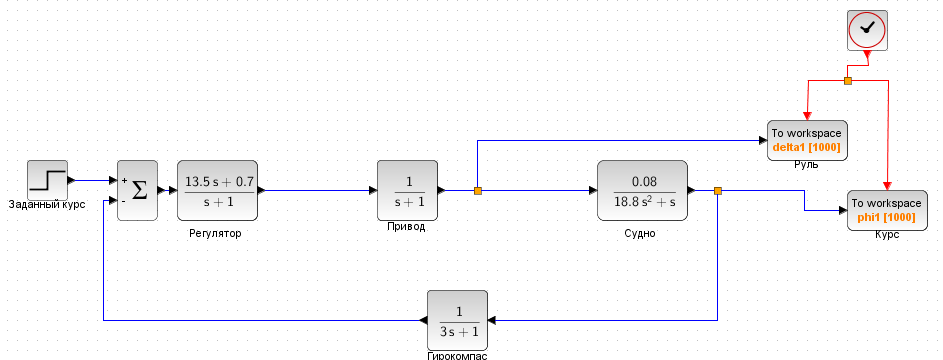 Рис. 2. Модель системы с ПД-регулятором Переходные процессы в системе с ПД-регулятором при изменении курса на 10 градусов. 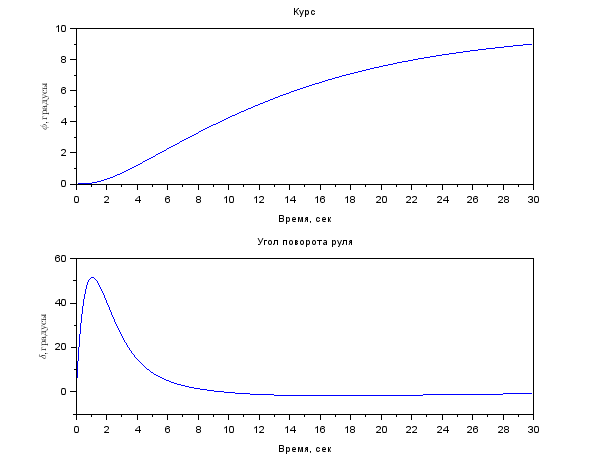 Рис. 3. Переходные процессы в системе с ПД-регулятором при изменении курса на 10 градусов Модель системы с ПД-регулятором с учетом внешнего возмущения приведена на рисунке 4. 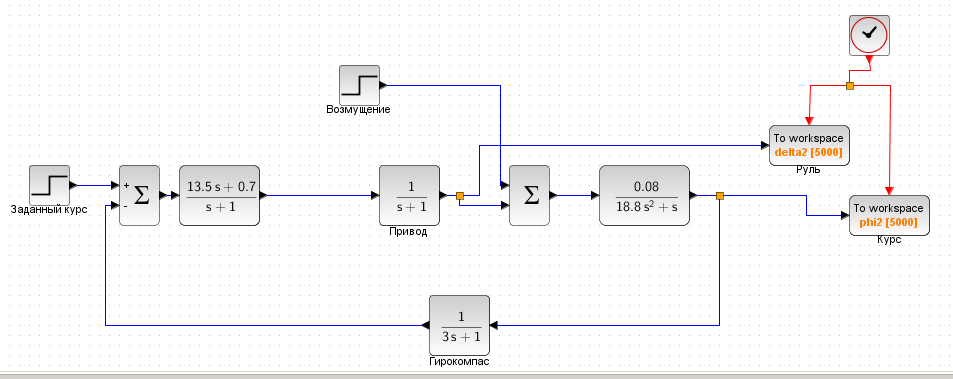 Рис. 4. Модель системы с ПД-регулятором с учетом внешнего возмущения Передаточная функция по возмущению для системы с ПД-регулятором:       Переходные процессы: 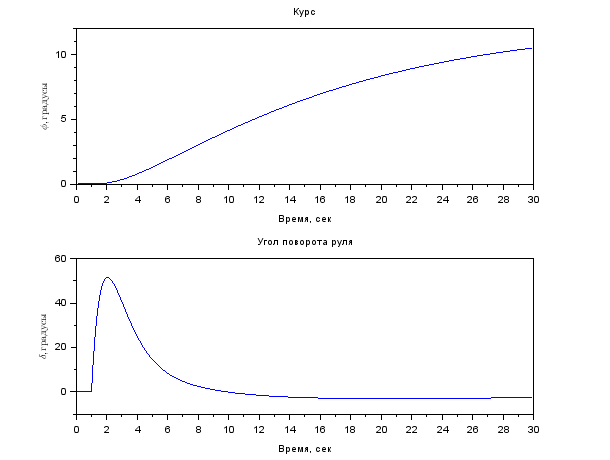 Рис. 5. Переходные процессы в системе с ПД-регулятором и возмущением при изменении курса на 10 градусов Судно с ПД-регулятором не вышло на заданный курс 10 градусов, потому что нет интегрального канала. Установившееся значение выходного сигнала системы вычисляется по теореме о конечном значении:  Статический коэффициент усиления ks = 0.0040259, установившееся значение сигнала выхода равно ϕ∞=1.4285546. Эти данные согласуются с результатами моделирования. 3. Исследование системы с ПИД-регуляторомПередаточная функция ПИД-регулятора:  Модель системы с ПИД-регулятором с учетом внешнего возмущения приведена на рисунке 6. 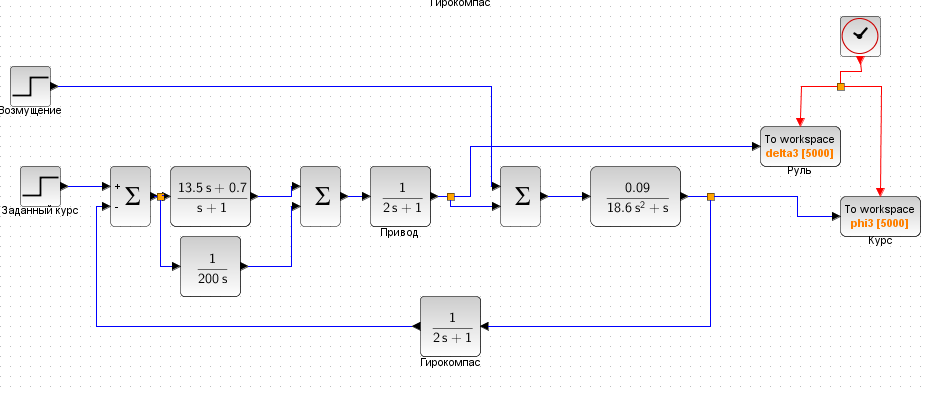 Рис. 6. Модель системы с ПИД-регулятором с учетом внешнего возмущения Передаточная функция по возмущению для системы с ПИД-регулятором:  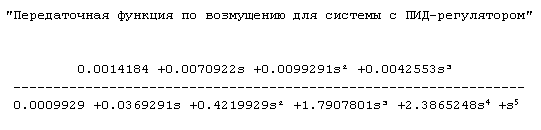 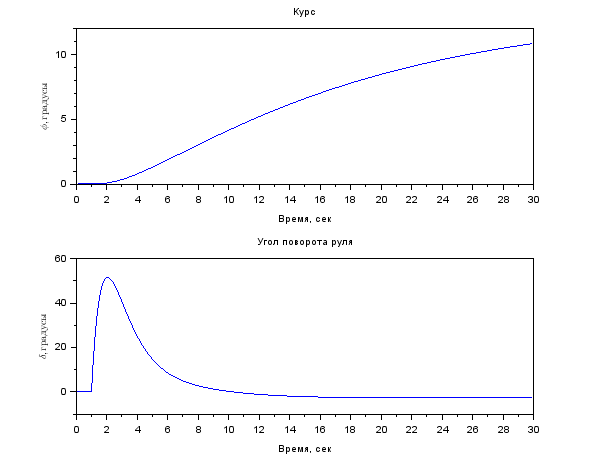 Рис. 7. Переходные процессы в системе с ПИД-регулятором и возмущением при изменении курса на 10 градусов Судно с ПИД-регулятором не вышло на заданный курс 10 градусов, потому что есть интегральный канал. Статический коэффициент усиления ks = 0.0045752, установившееся значение сигнала выхода должно быть равно ϕ∞= 1.4285546. Эти данные согласуются с результатами моделирования При использовании ПИД-регулятора вместо ПД-регулятора увеличился угол отклонения руля, при этом сигнал управления увеличился. В то же время увеличился угол отклонения от курса в 10 градусов до -1100 градусов при конечном времени 500 сек. Передаточная функция разомкнутой системы с ПИД-регулятором:    Запасы устойчивости: - по амплитуде ∞ дБ. - по фазе 87.554233 дБ Запас устойчивости является достаточным. Код в Scilabclose; subplot(2, 1, 1); title('Курс'); xlabel('Время, сек'); ylabel('$\phi, градусы$'); plot(phi1.time, phi1.values); subplot(2, 1, 2); plot(delta1.time, delta1.values); xlabel('Время, сек'); ylabel('$\delta, градусы$'); title('Угол поворота руля'); //-------------------------- I I -------------------------- s=poly(0,'s'); K=0.08; Ts=16.4; P=syslin('c', K, Ts*%s^2+s); TR=1; Toc=3; R= syslin('c', 1, TR*%s+1); H= syslin('c', 1, Toc*%s+1); C0= syslin('c',13.53*%s+0.7, %s+1); w1= P; // судно w2= R; // привод w3= H; // гирокомпас w4= C0; // регулятор Wf0=w1/(1+w1*w2*w3*w4) // передаточная функция disp("Передаточная функция по возмущению для системы с ПД-регулятором") disp(Wf0) // статический коэффициент усиления disp("статический коэффициент усиления") kf=horner (Wf0 , 1 ) disp(kf) // установившееся значение передаточной функции при s=0 disp("установившееся значение передаточной функции при s=0") disp(0.001626/0.0011382) scf(2); subplot(2, 1, 1); title('Курс'); xlabel('Время, сек'); ylabel('$\phi, градусы$'); plot(phi1.time, phi2.values); subplot(2, 1, 2); plot(delta1.time, delta2.values); xlabel('Время, сек'); ylabel('$\delta, градусы$'); title('Угол поворота руля'); //-------------------------- I I -------------------------- //-------------------------- I I I -------------------------- C= syslin('c', 0.7 + 13.535*%s + 0.005*%s^2, %s+1); w4= C; // регулятор Wf=w1/(1+w1*w2*w3*w4) // передаточная функция disp("Передаточная функция по возмущению для системы с ПИД-регулятором") disp(Wf) // статический коэффициент усиления disp("статический коэффициент усиления") kf=horner (Wf , 1 ) disp(kf) // установившееся значение передаточной функции при s=0 disp("установившееся значение передаточной функции при s=0") disp(0.001626/0.0011382) scf(3); subplot(2, 1, 1); title('Курс'); xlabel('Время, сек'); ylabel('$\phi, градусы$'); plot(phi1.time, phi3.values); subplot(2, 1, 2); plot(delta1.time, delta3.values); xlabel('Время, сек'); ylabel('$\delta, градусы$'); title('Угол поворота руля'); disp(min(delta3.values)) //-------------------------- I I I -------------------------- Wopen= w1*C // передаточная функция разомкнутой системы с ПИД-регулятором disp("Передаточная функция разомкнутой системы с ПИД-регулятором") disp(Wopen) Gm_dB = g_margin (Wopen) disp("Запас устойчивости по амплитуде") disp(Gm_dB) Pm = p_margin (Wopen) disp("Запас устойчивости по фазе") disp(Pm) |