Физическое взаимодействие столкновений. Приезжева Физическое_взаимодействие_объектов_Модели_столкновений. Курсовая работа по дисциплине Мультимедийные технологии
 Скачать 0.55 Mb. Скачать 0.55 Mb.
|

|
Министерство науки и высшего образования Российской Федерации  Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования Санкт-Петербургский Горный Университет КУРСОВАЯ РАБОТА По дисциплине Мультимедийные технологии (наименование учебной дисциплины согласно учебному плану) ПОЯСНИТЕЛЬНАЯ ЗАПИСКА Тема работы: Физическое взаимодействие объектов. Модели столкновения Автор: студент гр. ИТУ-20 _________________ / Приезжева В.Н. / (подпись) (Ф.И.О.) ОЦЕНКА: _____________ Дата: ___________________ ПРОВЕРИЛ: Руководитель работы ассистент ________________ / Мартиросян А.В. / (должность) (подпись) (Ф.И.О.) Санкт-Петербург 2021 МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ  ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ САНКТ-ПЕТЕРБУРГСКИЙ ГОРНЫЙ УНИВЕРСИТЕТ
Кафедра системного анализа и управления ЗАДАНИЕ НА КУРСОВОЕ ПРОЕКТИРОВАНИЕ студенту группы ИТУ-20 Приезжевой Валерии Николаевне (шифр группы) (Ф.И.О.) Тема: Физическое взаимодействие объектов. Модели столкновения Исходные данные: Вариант 17 Содержание пояснительной записки: Введение, анализ предметной области, история появления (развития), современное состояние предметной области, заключение, список литературы. Перечень графического материала: Рисунки Срок сдачи законченной работы 11 мая 2021 г. Задание выдал: ассистент / Мартиросян А.В. / (должность) (подпись) (Ф.И.О.) Задание принял к исполнению студент: / Приезжева В.Н. / (подпись) (Ф.И.О.) Дата выдачи задания: марта 2021 СОДЕРЖАНИ ВВЕДЕНИЕ 4 1. АНАЛИЗ ПРЕДМЕТНОЙ ОБЛАСТИ 5 2. ИСТОРИЯ ПОЯВЛЕНИЯ 10 3. СОВРЕМЕННОЕ СОСТОЯНИЕ ПРЕДМЕТНОЙ ОБЛАСТИ 14 ЗАКЛЮЧЕНИЕ 22 СПИСОК ЛИТЕРАТУРЫ 23 ВВЕДЕНИЕВ настоящее время, в связи со значительным прогрессом в области разработки аппаратного обеспечения вычислительной техники, стало возможным осуществлять моделирование движения реального мира в соответствии с физическими законами. Результаты такого рода моделирования используются в различных областях человеческой деятельности: при разработке систем виртуальной реальности и тренажеров, компьютерных игр, систем автоматизированного проектирования, в робототехнике и т.д. Базовой частью подобных систем является подсистема обнаружения столкновений. В общем случае, задача данной подсистемы состоит в проверке простого факта: пресекаются ли два объекта в пространстве. В случае, если объекты пересекаются, часто бывает необходима дополнительная информация, такая как нахождение объема пересечения, его аппроксимация в виде набора точек или простого геометрического объекта, глубина взаимопроникновения объектов. Эта информация используется, например, для оценки силы, которая должна быть приложена к моделируемым телам для их расталкивания в соответствии с законами механики. Целью данной работы является общая классификация подходов и алгоритмов определения столкновений и обзор тех, что появились за последние несколько лет. Задачи работы: – проанализировать предметную область; – описать историю появления предметной области; – оценить современное состояние предметной области. 1. АНАЛИЗ ПРЕДМЕТНОЙ ОБЛАСТИ1.1 Классификация алгоритмов определения столкновений1. По представлению входных данных. Алгоритмы, использующиеся в системах обнаружения столкновений, могут быть классифицированы по способу представления объектов на входе системы. Наиболее часто встречаются входные данные следующих типов: – сетки из треугольников; – конструктивная блочная геометрия; – неявно заданная геометрия. Использование первого типа обусловлено типа обусловлено тем, что треугольник является базовым геометрическим примитивом для отображения на экране дисплея сложных объектов. Координаты точек передаются через API драйверу графического адаптера, который растеризует входные данные и выводит на экран. Конструктивная блочная геометрия часто используется в САПР. Комбинируя простые базовые трехмерные объекты, такие как сферы, прямоугольные параллелепипеды, конусы с помощью булевых операций, на выходе получаем сложный объект. Неявное задание объекта предполагает задание формы объекта в виде математического уравнения. Например область, ограниченную сферой, можно задать в виде уравнения  . Очевидно, что этот способ слишком громоздкий и не годится для сложных объектов. . Очевидно, что этот способ слишком громоздкий и не годится для сложных объектов. Далее, если не указано явно, предполагается, что в качестве входных данных для алгоритма обнаружения столкновений используются полигональные сетки из треугольников. 2. По связям с системой моделирования. Чаще всего система обнаружения столкновений является подсистемой какой-либо более крупной системы, например моделирования хирургической операции. При этом подсистема определения столкновений может либо являться «черным ящиком» для остальных компонентов, либо быть тесно интегрированной с остальными компонентами. В первом случае такая подсистема может развиваться независимо от других компонентов системы в качестве сторонней библиотеки. Преимуществом подобного подхода является возможность повторного использования наработанного программного кода. Недостатком же можно считать сложность разработки и невозможность учесть все требования в каждом конкретном случае использования. При разработке подсистемы обнаружения столкновений может учитываться специфика проекта, например необходимость в использовании особого формата задания объектов, или тесная интеграция системы с компонентами моделирования, например обнаружение столкновений и одновременное вычисление расталкивающей силы для двух тел. Для этого случая могут применяться специализированные алгоритмы, которые позволяют добиться лучшей производительности и устойчивости. 3. Классификация по фазам. Наиболее простым методом для обнаружения столкновений между двумя объектами A и B является попарная проверка всех элементов, составляющих A, со всеми элементами В. Учитывая, что на каждом шаге моделирования может участвовать большое количество объектов, состоящих из тысяч многоугольников, можно заключить, что обнаружение столкновений является вычислительно сложной задачей. Если сразу проводить детальную проверку на пересечение с нахождением всей необходимой информации (характеристики объема пересечения, глубина взаимпроникновений и т.д.), то в итоге система будет обладать низкой масштабируемостью и уже при сравнительно небольшом количестве моделируемых объектов скорость работы не будет удовлетворять жестким условиям систем реального времени. В связи с этим алгоритмы определения столкновений часто делят на последовательность шагов или фаз. Широкая фаза отсеивает те пары объектов (или элементов одного объекта), которые заведомо не пересекаются. Узкая фаза необходима для детального рассмотрения каждой из пар объектов, не отброшенных при выполнении широкой фазы. На данном этапе, если объекты пересекаются, то для них находится контактная информация. Соответственно, наиболее общим признаком, по которому можно классифицировать алгоритмы определения столкновений, будет принадлежность к широкой или узкой фазе. Для широкой фазы подходят алгоритмы, которые позволяют с минимальными временными затратами отбраковать наибольшее количество пар. При этом преимущество отдается скорости работы алгоритма. Для этого вместо сложного исходного геометрического представления объекта используют ограничивающую геометрию, или ограничивающий объем. Ограничивающий объем – это область пространства, которая содержит данный объект. Для широкой фазы используют простые по форме объекты, чаще всего сферы или прямоугольные параллелепипеды. Габариты ограничивающего объема должны быть такими, чтобы исходный объект целиком помещался в него, но при этом имел минимально возможный объем. Таким образом, простая попарная проверка друг с другом объектов с большим количеством элементов заменяется на проверку на пересечение между простыми объектами. Например, для определения, пересекаются ли две сферы, необходимо оценить истинность следующего выражения:  где R1 и R2 – радиусы сфер, O1 и O2 – радиус-векторы их центров. где R1 и R2 – радиусы сфер, O1 и O2 – радиус-векторы их центров.Если два ограничивающих объема пересекаются, то далее производится их проверка на пересечение с использованием исходного геометрического представления (т.е. происходит передача пары объектов на узкую фазу). В реальных моделируемых сценах лишь небольшое количество объектов находится в непосредственной близости, следовательно, получается заметный выигрыш в производительности. Дальнейшее увеличение производительности можно получить, если вместо наиболее простого случая попарной проверки всех моделируемых объектов применить либо техники пространственного разделения сцены, либо алгоритмы, учитывающие когерентность временных шагов моделирования, т.е. когда положения тел изменяются не слишком сильно по прошествии малого временного шага. К последней группе относится алгоритм «sweep-and-prune». Основная идея алгоритма – проецирование объектов сцены на одну или несколько координатных осей, сохранение минимальных и максимальных проекций для объектов сцены на одну или несколько координатных осей, сохранение минимальных и максимальных проекций для объектов в списки и далее на каждом временном шаге поддержании списков в упорядоченном состоянии. Если временная когерентность высокая, то затраты на сортировку будут незначительными при использовании подходящих методов, например сортировки вставками. Запрос на столкновение для объекта может быть выполнен за время, близкое к константе путем проверки соседних значений из списка и получение соответствующих им объектов. Наиболее простой вариант разбиения – равномерное деление плоскости на двумерные ячейки одного размера и далее проецирование всех объектов сцены на эту плоскость. Таким образом, каждый объект ассоциирован с одной или несколькими ячейками. Чтобы найти объекты, потенциально пересекающиеся с заданным, необходимо проверить только те объекты, которые находятся в той же ячейке, что и заданный. Основным недостатком равномерного разбиения пространства является неэффективность проверок для случая, когда сцена содержит объекты с сильно различающимися размерами. В этом случае сложно подобрать подходящий размер ячейки. Алгоритм узкой фазы принимает на вход список пар объектов, отобранных широкой фазой как наиболее вероятных кандидатов на столкновение. Используя исходное геометрическое представление объектов, алгоритм на выходе дает ответ на вопрос, пересекаются ли на самом деле объекты, поданные на вход. Если пара объектов пресекается, алгоритм также может вернуть дополнительную информацию: – глубину взаимопроникновения объектов друг в друга, т.е. минимальное расстояние, на которое нужно переместить объекты, чтобы они перестали пересекаться; – нормаль, вдоль которой считается глубина взаимопроникновения; – аппроксимацию объема пересечения. Эта информация может использоваться для нахождения времени, когда объекты имели одну точку соприкосновения, для вычисления импульса, который необходимо приложить к объектам для их реалистичного расталкивания и т.д. Алгоритмы узкой фазы можно разделить на две группы по характеру получения результатов: – работающие в пространстве объектов; – работающие в пространстве изображений. Работающие в пространстве изображений алгоритмы характеризуются тем, что используют графические операции, такие как растеризация, для обнаружения столкновений. Таким образом, объекты сцены отображаются в пространство с ограниченной размерностью, и следовательно, столкновение находится с погрешностью, зависящей от размерности игрового пространства. Соответственно, алгоритмы, не имеющие свойств алгоритмов пространства изображений, относятся к группе алгоритмов, работающих в пространстве объектов. 2. ИСТОРИЯ ПОЯВЛЕНИЯФизические движки отвечают за определение места нахождения каждого объекта в сцене в определённый промежуток времени. Объекты могут сталкиваться друг с другом, а затем двигаться в различных направлениях. Эту общую проблему можно настроить на несколких уровнях. Проблему можно разделить на 3 части: – динамика; – обнаружение столкновений; – реакция на столкновения. Динамика занимается вычислением новых позиций объектов на основе их скорости и ускорения. Из школьной программы мы знаем кинематические уравнения и три закона Ньютона, которые описывают движение объектов. Нам нужны следующие уравнения: 1. Уравнение равномерно ускоренного движения (рис.1.1).  Рисунок 1.1. Уравнение равномерно ускоренного движения: скорость 2. Уравнение координаты равноускоренного движения (рис.1.2).  Рисунок 1.2. Уравнение равномерно ускоренного движения: координата Остальные уравнения пригодятся для анализа ситуаций, а не моделирования. Каждый объект должен хранить три свойства: скорость, массу и результирующую силу. Здесь мы и находим первое решение: результирующую силу можно представить как списком, так и единичным вектором.. При дальнейшем размышлении выясняется, что результирующая сила — это полная сила, приложенная в одномкадре, следовательно мы можем использовать вектор и очищать его в конце каждого обновления. При таком подходе пользователь может применять силу, добавив ее, а удаление происходит автоматически. Таким образом, мы не только сокращаем код, но и увеличиваем производительность, поскольку не суммируем силы, а используем промежуточную сумму. Обнаружение столкновений — более комплексный процесс, но мы можем облегчить его с помощью нескольких приемов. Просмотрев некоторые примеры столкновения объектов, можно заметить, что в большинстве случаев на каждой форме есть самая дальняя точка, находящаяся внутри другой. Оказалось, этого достаточно, чтобы отреагировать на столкновение. По этим двум точкам мы можем определить нормаль и то, насколько глубоко объекты находятся друг в друге. Этот важный шаг предполагает возможность абстрагироваться от концепции различных форм и беспокоиться только о точках в ответе. Реакция на столкновения реализуется следующим образом. Поскольку мы заменили концепцию форм на точки, реакция на столкновение – это практически чистая математика. Если мы знаем только то, что объекты a и b накладываются друг на друга (столкнулись), простейшей реакцией будет уничтожить оба или один из объектов или вернуть их назад в их предыдущее положение. В принципе, этого может быть достаточно для некоторых типов объектов, но для физически реалистичных объектов хорошо бы задать более осмысленное поведение. Чтобы это организовать, нам потребуется больше информации, чем просто "a и b пересекаются". А конкретнее, нас интересует характер пересечения. Проецирование — это один из физически реалистичных методов работы с пересекающимися ("взаимно проникающими") объектами. Основная идея в том, чтобы кратчайшим путем переместить объекты так, чтобы они перестали накладываться друг на друга. Обсчет результата столкновения в этом случае эквивалентен нахождению кратчайшего вектора перемещения V, при котором пересечение объектов прекратится. Существует также несколько других способов реализации этой идеи, например, при помощи расчета упругих сил или при помощи расчета импульсов. В первом случае используется расчет сил упругой деформации, которые выводят объекты из соприкосновения. Во втором случае определяются мгновенные импульсы для того, чтобы предотвратить взаимное проникновение объектов. Можно взглянуть на эти методы с точки зрения того, как они влияют на положение объекта в пространстве. В проекционном методе положение изменяется напрямую; в импульсном методе изменяется первая производная от координат (т. е. изменяются скорости), а в методе упругих сил изменяется вторая производная от координат (т. е. ускорения, вызванные упругими силами). Цель всех трех этих методов — переместить объекты в какое-то определенное положение. В нашем случае мы хотим переместить столкнувшиеся объекты так, чтобы они перестали накладываться, и все три указанных метода подходят для нашего алгоритма определения столкновений. Мы выбрали проекционный метод, потому что он наиболее прост и по результатам практических испытаний хорошо себя показал. Итак, от процедур, определяющих столкновения, нам нужен не просто результат в виде булева значения (столкнулись/не столкнулись), но также и вектор проекции. Вектор проекции может быть задан как единичный вектор, определяющий направление выхода объектов из пересечения, плюс скалярная величина — глубина проникновения. Есть идея, как вывести объекты из столкновения — но хорошо бы еще изменить скорости столкнувшихся объектов так, чтобы смоделировать физически реалистичные отскоки и трение. Алгоритм реакции на столкновения состоит из следующих шагов: – найти вектор перемещения, необходимый для выведения объектов из столкновения (метод проецирования); – разбить вектор скорости на две составляющие: параллельную поверхности столкновения и перпендикулярную ей; – рассчитать отскок, используя перпендикулярную составляющую; – рассчитать трение, используя параллельную составляющую. 3. СОВРЕМЕННОЕ СОСТОЯНИЕ ПРЕДМЕТНОЙ ОБЛАСТИ3.1 Алгоритм определения пересечений полигональных объектов с использованием ориентируемых ограничивающих объемовПри разработке система автоматизированного проектирования, визуализация научных данных и виртуальной реальности часто требует не только отобразить результаты моделирования средства графики, ну и провести анализ текущего расположение синтезировала предмета относительно других объектов сцену, выполнить проверку на пересечение [1]. Необходимость решения этого вопроса вызвано тем, что невозможно одновременное нахождения нескольких объектов в одном месте пространства. Такими объектами, например, могут быть элементы архитектурного сооружения, молекулы веществ, объекты визуальной обстановки. Кроме того, часто требуется визуализировать физический процесс столкновений, скольжения, деформации, последовательность моделирования которых зависит двух основных этапов: – определение момента взаимодействия объектов; – реагирование на столкновение объектов [3]. При решении задач пересечения, особенно в системах реального времени, важно обеспечивает точность и скорость определения пересечений. Эта проблема часто усложняется полигональным представлением объекта, поверхность которых образована многочисленным набором треугольников. Объекты, смоделированные таким образом, принято называть многогранниками. Существенно повысить скорость обнаружения пересечений позволяет использование ограничивающих объемов и их иерархий, аппроксимирующих поверхность объекта более простым образом. Особенно это актуально для систем реального времени, где необходимо осуществлять тест на пересечение для каждого нового положения тел в пространстве. При этом объекты могут подвергаться как преобразованием сдвига, так и поворота, что выкладывает некоторые особенности на процесс определения пересечений с использованием ограничивающих объемов. 1. Виды ограничивающих объектов. В простейшем случае пересечение двух невыпуклых многогранников можно определить, проверив попарно на пересечение каждую грань обоих объектов. Этот подход неэкономичен и требует О(N1,N2) вычислительных затрат, где N1 и N2 – количество граней образующий каждый из объектов [2]. Более совершенные подходы основаны на применении ограничивающих объектов, имеющих геометрию более простой формы, в результате чего, проверка на пересечение выполняется намного быстрее. Наиболее часто применяются следующие виды ограничивающих объектов: 1. Плоскость. Одним из наиболее простых ограничивающих объектов является плоскость. Проверка на пересечение объекта с плоскостью основана на том условии, что две точки M1 и M2 лежат по одну сторону от плоскости, если при подстановке координат этих точек в уравнение плоскости числа по одну сторону от плоскости, если при подстановке координат этих точек в уравнение плоскости числа  имеют одинаковые знаки. В этом случае числа A, B, C, D – коэффициенты уравнения плоскости. если числа имеют разные знаки, то точки находятся по разные стороны от плоскости. имеют одинаковые знаки. В этом случае числа A, B, C, D – коэффициенты уравнения плоскости. если числа имеют разные знаки, то точки находятся по разные стороны от плоскости.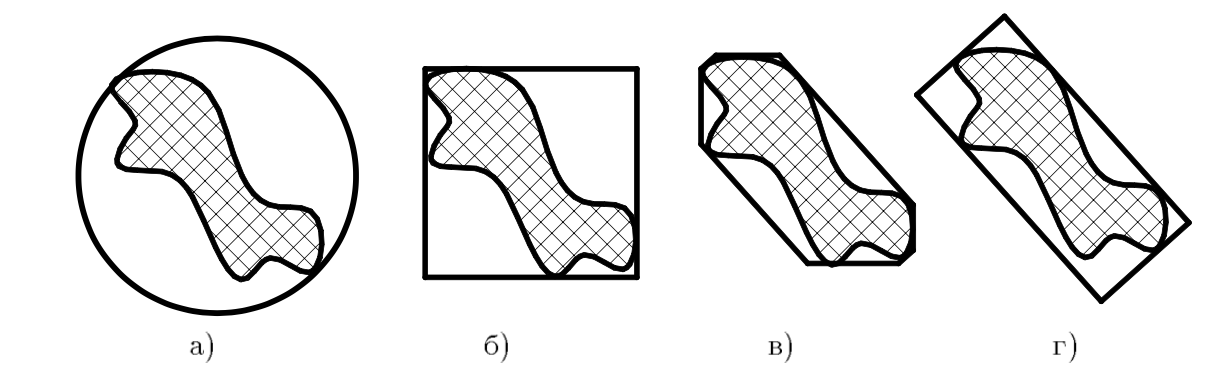 Рисунок 2. Ограничивающие объемы: а) сфера, б) объем с привязкой к осям координат, в) дискретный, ориентируемый многогранник, г) ориентируемый ограничивающий объем 2.Сфера. Самой простой ограничивающей оболочкой является сфера (рис. 1,а). В настоящее время существует множество алгоритмов построения ограничивающих сфер. Проверка на пересечение объектов сводится к проверке расстояния между центрами сфер [6]. Если расстояние больше суммы радиусов сфер, то объекты не пересекаются:  . .Несмотря на то, что проверка на пересечение при помощи сфер выполняется быстрее других проверок, ограничивающих объем, представленный подобным образом, слабо приближен к поверхности объекта, что отражается на точности определения пересечений. Особенно это заметно при построении выпуклой оболочки вытянутых тел. Так, например, при ограничении отрезка сферой концы отрезка находятся на поверхности ограничивающей оболочки, а центр удален от поверхности сферы на расстояние радиуса. 3. Объем с привязкой к осям координат. Другим ограничивающим телом является параллелепипед, стороны которого параллельны координатным осям (рис 1, б). Соответственно, координаты вершин параллелепипеда равны минимальным и максимальным координатам вершин объекта. Такие объемы называются объемами с привязкой к осям координат (axis-aligned bounding boxes – AABB) [4, 5 ,8]. Тест на пересечение при использовании ААВВ в двумерном случае производится как проверка пересечения интервалов (рис. 2, а):  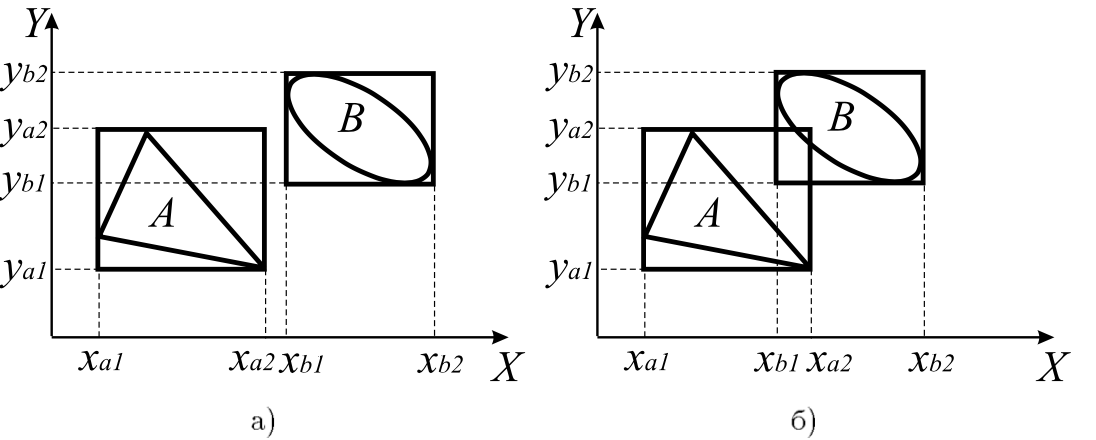 Рисунок 3. Определение пересечений на основе объемов с выровненной осью Недостатком этого подхода, то, что объемы с привязкой к осям координат не всегда с достаточной степенью точности ограничивают объект. В этом случае ограничивающие объемы могут пересекаться, тогда как сами тела не пересекаются (рис. 2, б). В настоящее время используются различные варианты вычисления ААВВ: – ограничивающий объем фиксированного размера, который остается постоянным в течение всего времени; – динамически изменяющийся объем, размер которого пересчитывает каждый раз заново в текущий момент времени. 4. Дискретный, ориентируемый многогранник. Расширенным представлением объема с выровненной осью является k-дискретный ориентированный многогранник (k-discrete orientation polytope, или k-dop), где k-количество сторон [5]. Нормали, восстановленные к каждой стороне, определяют ориентацию k-dop. Проверка на пересечение производится аналогично ААВВ, но используются дополнительные условия по каждому из рассматриваемых направлений. На рис. 1,в представлен 8-dop. 5. Ориентируемый ограничивающий объем. Одним из видов ограничивающих тел являются ориентированные ограничивающие объемы (Oriented Bounding Boxes, или. ОВВ) [7]. Ориентированные объемы наиболее точно аппроксимируют поверхность ограничиваемого объекта (рис. 1,г). При этом сама оболочка, в отличие от ААВВ и k-dop, изменяет свою ориентацию в пространстве в соответствии с вращением ограничиваемого объекта. Известны два основных способа определения пересечений объектов с использованием ОВВ. Теорема 1. Два многогранника пересекаются без полного включения одного в другой тогда и только тогда, когда существует ребро одного многогранника, пересекающее некоторую грань другого. Согласно этой теореме, для тестирования на пересечение двух ориентированных параллелепипедов необходимо осуществить 144 теста (  ). ).Теорема 2. Два непересекающихся выпуклых многогранника могут быть разделены плоскостью, которая либо параллельна грани одного из них, либо содержит ребра каждого из многогранников. Чтобы определить пересекаются ли многогранники, необходимо и достаточно исследовать их проекции на линию, перпендикулярную плоскости, определенную в теореме 2. Если проекции двух объектов не пересекаются, то не пересекаются сами объекты (рис.3). 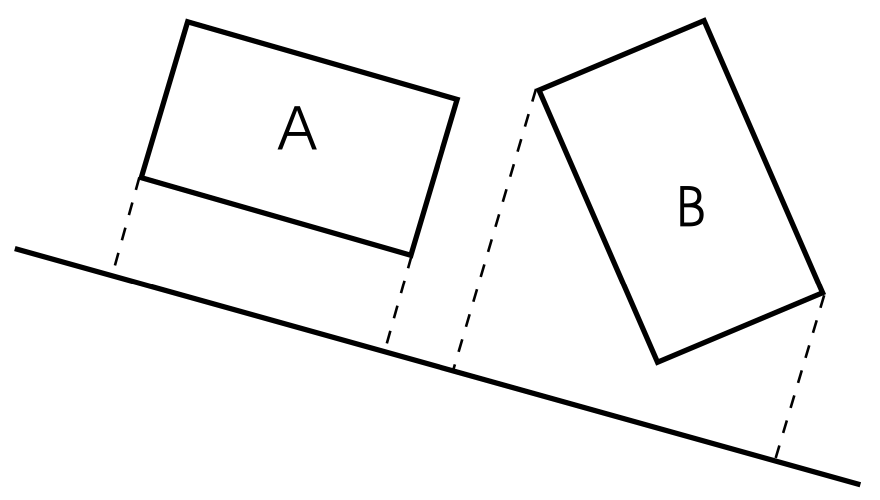 Рисунок 4. Проверка на пересечение двух ОВВ с использованием разделяющих осей В таком случае эта линия называется разделяющей осью. Следовательно, проверка на пересечение заключается в нахождении всех потенциально возможных разделяющих осей и исследование проекций многогранников на эти оси. Если разделяющая ось найдена, остальные случаи уже не исследуются. Для двух прямоугольных областей в трехмерном пространстве есть 15 потенциально возможных разделяющих осей: три оси для граней первой области, три – для второй, также девять осей, образованных ребрами первой и второй ОВВ-областей. 3.2 PC-CRASH - Компьютерная программа для анализа и моделирования дорожно-транспортных происшествийНи одна из областей современной науки не обходится без графического представления информации. Современная научная компьютерная графика дает возможность проводить вычислительные эксперименты с наглядным представлением их результатов. Компьютерная программа «PC Crash» – одна из самых распространенных и функциональных на сегодняшний день компьютерных программ для анализа и моделирования механизма дорожно-транспортных происшествий (ДТП), создатель которой – австрийская фирма Dr. Steffan Datentechnik Ges.m.b.H (DSD). В программе «PC Crash» нашли применение несколько моделей расчета столкновений: классическая модель удара, а также более совершенные – силовая и сетчатая модели. Важным преимуществом программы является возможность вести расчет параметров движения автотранспортных средств и других объектов в динамике – с учетом действительных их параметров, а также окружающей среды и управляющих воздействий. Кроме того, в программе нашли применение и кинематические модули расчета. Результаты моделирования, полученные при работе с программой «PC Crash», могут быть представлены как текстовые файлы, содержащие исходные и расчетные данные, а также могут быть выведены в виде диаграмм и таблиц. Для визуализации выполненного моделирования служат – 2D (рис. 5) - (вид сверху на рабочий стол) и 3D анимации (рис.6) (пространственный вид). Кроме того, выполненное моделирование можно приложить к экспертному заключению в виде проектного файла. 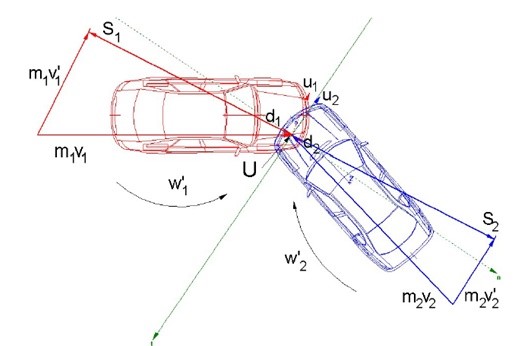 Рисунок 5. Классическая модель столкновения 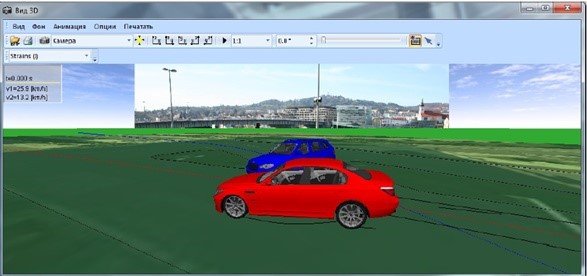 Рисунок 6. 3D-модель столкновения автомобилей Вопросы реконструкции ДТП: – место столкновения и положения транспортных средств и других объектов; – режимы движения (скорости при столкновении, начальные скорости и т.д.); – реконструкция действий водителя (место реагирования); – параметры тяжести ДТП; – возможный ущерб (повреждения автомобиля, травмы, AIS, ...); – правдоподобность столкновения (сочетаемость повреждений, последовательность событий). Основные функции программы PC-Crash: – Моделирование среды движения в 3D, с учетом локальных поверхностей, бокового ветра; – Моделирование динамики транспортных средств (в том числе - автопоездов) в ЗD; – моделирование столкновений в 3D; – моделирование движения пассажиров (Madymo ® and multibody); – моделирование движения транспортных средств и других объектов в кинематике. ЗАКЛЮЧЕНИЕЗа последние три десятилетия в литературе было представлено большое количество методов и алгоритмов для обнаружения столкновений. Каждый из них имеет недостатки или может быть использован только при ограничениях на способ задания формы объектов, характер движения объектов или на тип аппаратного обеспечения, используемого для моделирования сцены и т.п. В результате курсовой работы было проведено исследование компьютерной графики и модели столкновения объектов, что позволило оценить, насколько перспективным и актуальным является это направление. В первой части курсовой работы был выполнен анализ предметной области: классификация алгоритмов определения столкновения. Во второй и третей частях были соответственно, изучены история возникновения, развития и применение компьютерной графики в настоящее время, основные алгоритмы, позволяющие визуализировать взаимодействие тел. Полученные в результате работы теоретические знание могут быть в случае необходимости применены на практике. Так как рынок информационных технологий не стоит на месте, а постоянно развивается, возможно в скором будущем разработчики программного обеспечения смогут предложить специалистам в области компьютерной графики принципиально новые методы алгоритмизации, появятся новые области для визуализации и анализа. СПИСОК ЛИТЕРАТУРЫ1. Препарата Ф., Шеймос М. Вычислительная геометрия. М.: Мир, 1989. 2. Шикин Е.В., Бориесков А.В. Компьютерная графика. Полигональные модели. М.: ДИАЛОГ-МИФИ, 2000. 3. Эйнджел Э. Интерактивная компьютерная графика. Вводный курс на базе OpenGl. М.: Издательский дом «Вильямс», 2001. 4. Компьютерные технологии в науке, производстве, социальных и экономических процессах. Тр. Междунар. науч.-практ. конф. Новочеркасск: ООО НПО «ТЕМП», 2002. 5. Проблемы передачи и обработки информации в сетях и системах телекоммуникаций. Тр. Междунар. науч.-техн. конф. Рязань.: РГРА, 2002. 6. Gopcroft J.E.., Schwartz J.T., Sharir M. Efficient detection of intersections among spheres // The Intern& J& of Robotics Research& 1983. 4, N 4. 77-80. 7. Hottschalk S., Lin M., Manocha D. Obb-tree: a hierarachial structure for rapid interference detection // Proc. of ACM Siggraph-96. New York: ACM SIGGRAPH, 1996. 171-180. |