датчик. КУрсОвая работа по дисциплине Первичные измерительные преобразователи
 Скачать 2.3 Mb. Скачать 2.3 Mb.
|

 Рисунок 2.1 — Пример использования фотоэлектрического датчика 2.2 типы датчиков по месту сканирования Принцип сканирования - это метод, используемый фотоэлектрическим датчиком для детектирования целевых объектов. Выбор датчика с определенным принципом сканирования, в первую очередь, зависит от физических особенностей измеряемых объектов. Одни из них могут быть прозрачными, другие - с повышенными отражающими способностями. Иногда возникает необходимость определить разницу в цвете объектов. Расстояние сканирования - также немаловажный фактор при выборе датчика определенного типа, поскольку некоторые типы имеют большой диапазон сканирования, в то время как другие лучше работают на небольших расстояниях. 2.2.1 датчики прямого луча Наиболее подходящими для нашей задачи являются датчики прямого луча (рисунок 2.2). Такие датчики состоят из двух устройств: излучателя и приемника, которые располагаются таким образом, чтобы максимальный объем излучаемого света попадал на приемник. При этом целевой объект должен находиться на одном уровне с лучом. Когда объект перекрывает луч, изменяется выходной статус приемника. Когда объект выходит за пределы луча, выходной статус сигнала приемника возвращается в нормальное состояние. Датчики на прерывание луча удобны для детектирования непрозрачных или отражающих объектов, однако их нельзя использовать для обнаружения прозрачных предметов. Кроме того, вибрация может нарушить центровку излучателя на приемник. В целом же, высокий коэффициент усиления разнесенных в разные корпуса фотоэлектрических приемников и излучателей позволяет использовать их в условиях высокой загрязненности окружающей среды. Максимальный рабочий диапазон таких датчиков составляет 350 метров.  Рисунок 2.2 — Датчики прямого луча Эффективный световой пучок датчиков - это диаметр луча в том месте, где он пересекается с целевым объектом. Для датчиков с прерыванием луча это диаметр линзы излучатели и приемника, поэтому размер минимального целевого объекта должен быть равен диаметру линзы. 2.2.2 датчик отраженного луча  Рисунок 2.3 — Датчики отраженного луча Такие датчики содержат в одном корпусе и излучатель, и приемник. Световой пучок посылается эмиттером на рефлектор (отражатель специальной конструкции), а затем возвращается отраженным в приемник. Когда целевой объект блокирует световой поток между датчиком и рефлектором, изменяется выходное состояние датчика. При исчезновении преграды датчик возвращается в нормальное состояние. Максимальный диапазон измерений для таких датчиков составляет 55 метров. Эффективный диапазон излучения рефлекторных датчиков находится от линзы излучателя до границы рефлектора. Минимальный размер целевого объекта должен равняться размеру используемого рефлектора.  Рисунок 2.4 — Схема датчика отраженного луча Как правило, рефлекторы заказываются отдельно от датчиков. Они бывают различной формы, круглые или прямоугольные. Диапазон измерений датчиков с рефлекторами указывается при использовании конкретной модели рефлектора. Отражающие наклейки не рекомендуется использовать с поляризованными датчиками.  Рисунок 2.5 — Рефлектор Призматические рефлекторы отражают внешний свет параллельно, при этом коэффициент его отражения выше, чем у любого объекта под углом более 15 градусов. Обычно, рабочее расстояние увеличивается пропорционально размерам отражателя. Рефлектор может изменять плоскость поляризации внешнего освещения на 90 градусов.  Рисунок 2.6 — Отражение от призматического рефлектора. Отражение от ровной отражающей поверхности Датчики с отражателями могут оказаться плохими помощниками при детектировании блестящих предметов, которые будут отражать свет от собственной поверхности. Датчик же при этом будет не в состоянии определить от какого предмета отражается луч, от рефлектора или попавшего в луч целевого объекта.  Рисунок 2.7 — Принцип работы датчика Sensor Lens – линза датчика; Shiny Object – блестящий предмет; Corner-Cube or Normal Reflector – рефлектор. Поэтому для работы с бликующими предметами используются специальные поляризационные фильтры. Они размещаются перед линзой излучателя и приемника и принимают световой пучок только в одной плоскости. В датчиках с поляризованным отражателем излучение света поляризовано в вертикальной плоскости, в то время как прием излучения происходит через поляризованный фильтр в горизонтальной плоскости. Призматический отражатель изменяет световую плоскость под углом 90 градусов, а свет, отражаемый от других объектов, сохраняет свою плоскость излучения и блокируется входным фильтром приемника. Такой свет называется поляризованным. С такими датчиками используется угловой кубический рефлектор. Поляризованный фильтр на приемнике пропускает только отраженный от рефлектора свет.  Рисунок 2.8 — Датчик с фильтром Depolarized Light — деполяризованный свет; Lens — линза; Polarizing Filter — светофильтр; Polarized Light — поляризованный свет; Corner-Cube or Normal Reflector — рефлектор. Отдельные модификации датчиков выпускаются для работы со стеклянными предметами. Такие датчики очень чувствительны к даже небольшой разнице между исходящим и входящим сигналом. 2.2.3 датчик рассеянного луча В диффузионных датчиках излучатель и приемник расположены также в одном корпусе. Свет, что исходит из эмиттера, достигает целевого объекта и отражается от его поверхности под разными углами. Если приемник получает достаточное количество отраженного света, датчик изменит свое выходное состояние (сработает). Если отраженный свет не возвращается в приемник, выходной сигнал останется в неизменном состоянии. Такие датчики представляют наиболее экономичное и легко монтируемое решение (их стоимость ниже стоимости других фотоэлектрических приборов). В датчиках подобной конструкции эмиттер размещен перпендикулярно плоскости целевого объекта, а приемник установлен под некоторым углом для фиксации рассеянного излучения (Рисунок 2.9) Очевидно, что до приемника доходит лишь малая доля света, поэтому максимальный рабочий диапазон таких датчиков составляет всего 4 метра. Обычно диффузионные датчики работают в режиме срабатывания на светлое: датчик срабатывает при пересечении луча объектом.   Рисунок 2.9 — Рассеивающий датчик Максимальный рабочий диапазон указывается при работе датчика на матовом белом фоне. В зависимости от характера поверхности целевого объекта применяются особые корректирующие коэффициенты: Матовая белая поверхность 100%; Белая бумага — 80 %; Серый ПВХ — 57 %; Дерево с легкой окраской — 73 %; Пробковое дерево — 65 %; Белый пластик — 70 %; Черный пластик — 22 %; Черный неопрен — 20 %; Автомобильные покрышки — 15 %; Матовый алюминий — 120 %; Нержавеющая сталь, полированная — 230 % Особого рассмотрения при выборе такого датчика требует вопрос цвета целевого объекта. Очевидно, что лучше воспринимаются светлые объекты на темном фоне, поскольку они отражают больше света. Для работы с темными объектами датчики имеют специальный регулировочный потенциометр (Рисунок 2.10)  Рисунок 2.10 — Регулировочный потенциометр Диффузионные датчики позволяют измерять различные участки области прохождения луча: быть нечувствительными к близко расположенным объектам (подавление переднего фона), к объектам за пределами определенной зоны (подавление заднего фона) или одновременно к близко и далеко расположенным предметам. Подавление заднего фона используется для детектирования объектов до определенного расстояния. Все объекты, находящиеся за границами этой области, датчиком игнорируются. Регулировка рабочего расстояния здесь не связана с чувствительностью приемника, а достигается оптической триангуляцией. Такие датчики имеют в конструкции датчик положения (PSD - position sensor detector). Отраженный луч попадает на датчик под различным углом. Чем больше расстояние до объекта, тем острее угол отражения. Благодаря такому методу измерения угла отражения датчики могут детектировать все объекты на заданном расстоянии вне зависимости от их цвета.   Рисунок 2.11 - Диффузионный датчик Также, диффузионные датчики могут иметь подавление переднего фона или иметь регулируемое расстояние работы, а также работать с блестящими предметами. Датчики с подавлением переднего и заднего фона позволяют пользователю точно установить минимальное и максимальное расстояние детектирования. Таким образом, датчик срабатывает только на целевые объекты, появляющиеся в заданной зоне. Например, сферой применения таких датчиков являются промышленные конвейеры, где рабочая область датчика соответствует ширине конвейерной ленты. Нечувствительность датчиков к отражающим и рифленым поверхностям гарантирует отсутствие ошибочных срабатываний [2]. 3. РАЗРАБОТКА ФУНКЦИОНАЛЬНОЙ СХЕМЫ ПИП, В ТОМ ЧИСЛЕ СХЕМЫ ПРЕОБРАЗОВАНИЯ ИЗМЕРЯЕМОЙ ВЕЛИЧИНЫ В ЭЛЕКТРИЧЕСКИЙ СИГНАЛ На рисунке 3.1 показан общий вид футбольных ворот, снабженных системой индикации взятия ворот; на рисунке 3.2 — конструкция устройства без пьезодатчиков, закрепленных на стойках и перекладине ворот; на рисунке 3.3 — функциональная схема блока управления; на рисунке 3.4 — геометрическое расположение внешнего контура блока датчиков, находящихся в площади ворот, относительно лицевой линии ворот; на рисунке 3.5 — способ крепления датчиков к стойкам и перекладине ворот; на рисунке 3.6 — схема прокладки соединительных кабелей между датчиками, закрепленными на стойках и перекладине ворот, и блоком управления.  Рисунок 3.1– Общий вид футбольных ворот. 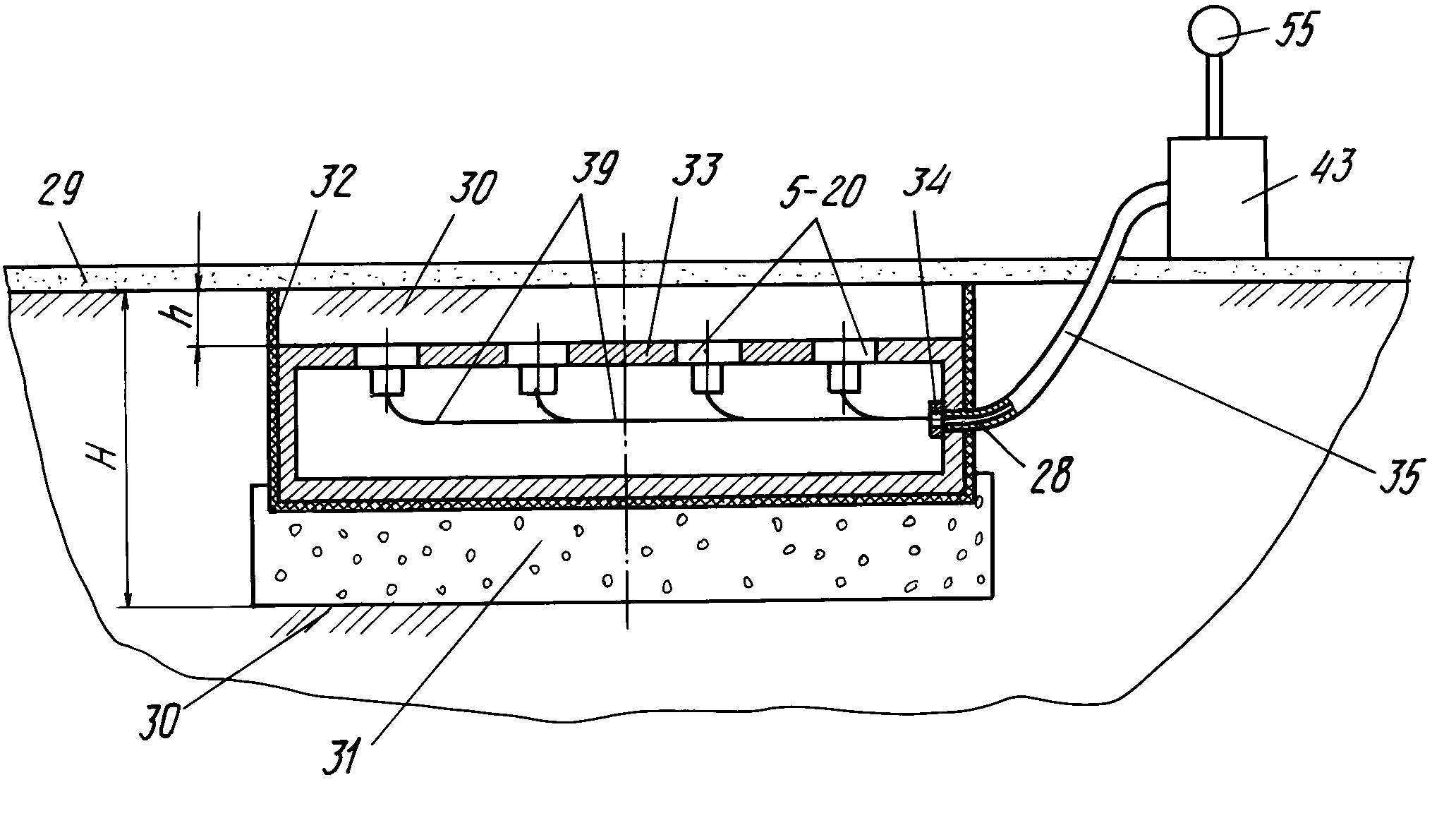 Рисунок 3.2 — Конструкция устройства без пьезодатчиков, закрепленных на стойках и перекладине ворот. 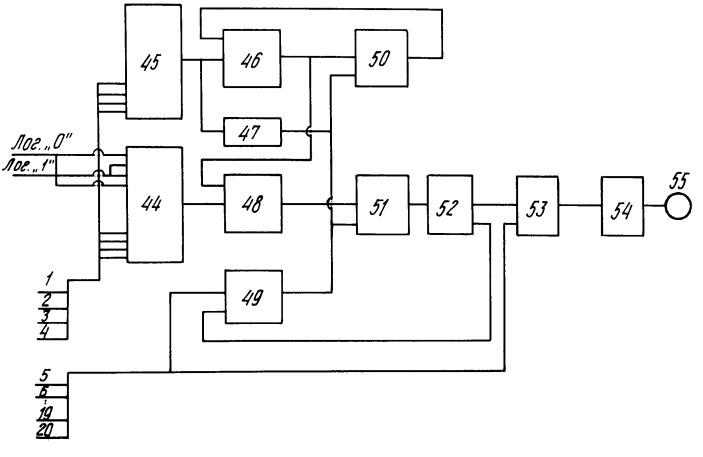 Рисунок 3.3 — Функциональная схема блока управления.  Рисунок 3.4 — Геометрическое расположение внешнего контура блока датчиков, находящихся в площади ворот, относительно лицевой линии ворот. 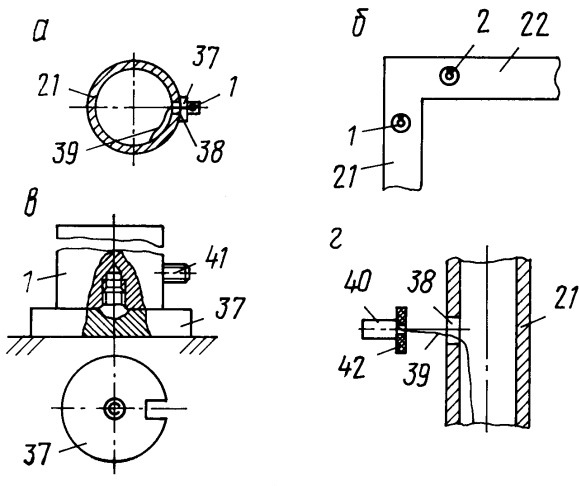 Рисунок 3.5 — Способ крепления датчиков к стойкам и перекладине ворот. 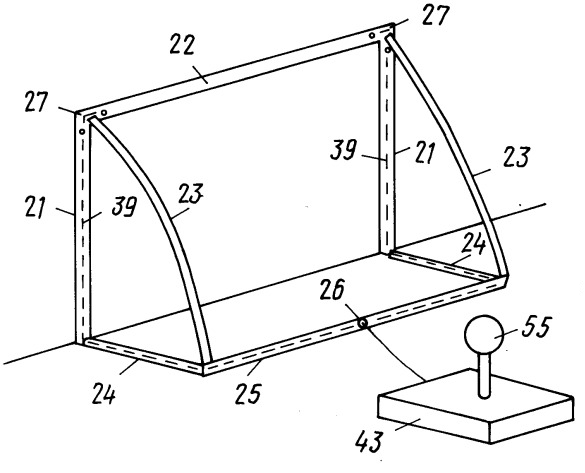 Рисунок 3.6— Схема прокладки соединительных кабелей между датчиками, закрепленными на стойках и перекладине ворот, и блоком управления. Устройство индикации взятия ворот содержит датчики 1-4 механических колебаний. Датчики 1 и 4 закреплены при помощи магнитов 37 к стойкам 21 ворот в задней их части около крестовин 27, служит для регистрации различных ударов о стойки 21 ворот (попадание в них мяча, постукивание о них бутс вратаря команды при очистке подошв от грязи и т. п. ) и связаны посредством соединительных кабелей 39 с блоком управления 43. Датчики 2 и 3 крепятся аналогично в задней части перекладины 22 около крестовин 27, служат для регистрации ударов мяча о перекладину 22 и связаны посредством кабеля 39 с блоком управления 43. В местах крепления датчиков в перекладине 22 и стойках 21 ворот имеются отверстия 38, через которые пропускается кабель 30 с разъемами 40 на концах. Через разъемы 40 на соединительные кабели 39 надеваются резиновые шайбы 42 для того, чтобы при снятии датчиков 1-4 с ворот соединительные кабели 39 не смогли проскочить внутрь стоек 21 или перекладины 22. Для крепления датчиков 1-4 на поверхность ворот на них при помощи резьбы крепятся магниты 37, имеющие плоскую цилиндрическую форму и паз для удобства подсоединения кабелей 39 к датчикам 1-4. Соединительный кабель 39 крепится к датчиками 1-4 при помощи разъемов 40, которые посредством резьбы наворачиваются на разъемы 41 датчиков 1-4. Для соединения датчиков 1-4 с блоком управления 43 кабели 39 пропускают внутри перекладины 22, стоек 21 ворот, боковые нижних труб 24 и задней нижней трубы 25, в середине которой сделано отверстие 26, через которое кабели 39 подсоединяются к блоку управления 43 (кабели 39 можно пропускать также через задние радиальные дуги 23 ворот). Блок управления содержит металлический каркас 33, представляющий собой коробчатую сварную конструкцию, в верхней части которого с внутренней стороны закреплены датчики 5-20, воспринимающие механические нагрузки (удары мяча, нагрузки от перемещения футболистов, попавших на травяной покров 29, находящийся над верхней частью металлического каркаса 33), передающие электрические сигналы на блок управления 43 посредством кабеля 39. Через отверстие 28 в боковой части металлического каркаса 33 кабели 39 проходят внутри гибкого металлического шланга 35, присоединенного одним концом 34 к металлическому каркасу 33, а другим – к блоку управления 43. Дно и боковые части каркаса 33 склеены резиной 32 для предотвращения передачи механических нагрузок на него сбоку и снизу, причем верхние кромки резины 32 выступают над поверхностью каркаса 33 на расстоянии h, что соответствует их расположению на уровне земли 30. Каркас 33 установлен на бетонном основании 31, вкопанном в землю 30 на определенном расстоянии Н от ее поверхности и имеющим форму поддона для фиксации каркаса 33 в определенном положении. На каркас 33 насыпается земля 30 слоем определенной толщины Н, на которой после засева вырастает травяной покров 29. Каркас 33 с резиной 32 геометрически так расположены относительно лицевой линии 36 ворот, что одна из верхних кромок резины 32 является внутренней по отношению к воротам кромкой лицевой линии 36, имеющей определенную толщину m. Блок управления 43 содержит мультиплексор 44, который в зависимости от адреса, поступающего с каналов от датчиков 1-4, подает уровни лог. "1" и лог. "0" на элемент И 48. Последний соединен с RS-триггером 51, необходимым для запоминания информации и соединенным с реле времени 52, которое переключается через t1 = 2 с. С реле времени 52 сигнал в зависимости от текущей коммутации поступает на элемент ИЛИ 49 или DV-триггер 53, в котором запоминается сигнал, поступающий с каналов от датчиков 5-20. Реле времени 54, которое отключается через t2 = 10 с, необходимо для увеличения времени индикации лампы 55. Каналы от датчиков 1-4 также связаны с элементом ИЛИ 45, который выдает на вход элемента И 46 уровень лог. "1". Элемент И 46 соединен с RS-триггером 50, необходимым для запоминания информации. Элемент 47 является устройством задержки, в котором сигнал задерживается на время, равное времени прохождения сигнала через элемент И 48, RS-триггер 51, реле времени 52 и элемент ИЛИ 49. Устройство работает следующим образом: В первоначальном состоянии все триггеры 50, 51 и 53 системы обнулены. При попадании мяча в перекладину 22 сработает один из датчиков 2 или 3, который находится ближе к месту удара. По каналу от датчика 2 или 3 сигнал попадает на адресные входы мультиплексора 44 и элемента ИЛИ 45, которые скоммутированы так, что при приеме сигналов от датчиков 2 и 3 на их выходах имеется сигнал лог. "1". Соответственно на выходах элементов И 46 и 48 устанавливается сигнал лог. "1". RS-триггер 51 устанавливается в этом случае в единицу. Выходной сигнал RS-триггера 51 через реле времени 52 подается на разрешающий вход V DV-триггера 53, который становится готовым к приему информации от каналов датчиков 5-20. Если мяч отскакивает от перекладины 22 в площадь ворот, тогда срабатывает один из датчиков 5-20, сигнал с которого устанавливает выход DV-триггера 53 в положении лог. "1". Этот сигнал через реле времени 54 включает лампу 55. Одновременно сигнал лог. "1" канала датчиков 5-20 через элемент ИЛИ 49 подается на R входы RS-триггеров 50 и 51 и устанавливает их входы на лог. "0", т. е. в первоначальное состояние В ситуации, когда мяч от перекладины 22 отскакивает в поле, т. е. когда не срабатывают датчики 5-20, реле времени 52 переключает сигнал лог. "1" через t1 = 2 c. с входа DV-триггера 53 на вход элемента ИЛИ 49, после чего RS-триггеры 50 и 51 устанавливаются в ноль, т. е. в начальное положение. При попадании мяча в стойку 21 ворот первым срабатывает датчик 1 или 4, сигнал с которого через соответствующий канал попадает на адресные входы мультиплексоры 44. В соответствии с этим адресом на выходе мультиплексора 44 устанавливается уровень сигнала лог. "0", на выходе элемента ИЛИ 45 – лог. "1", на выходе элемента И 46 – сигнал лог. "1", который запоминается в RS-триггере 50. Далее на инверсном выходе последнего устанавливается уровень лог. "0", который подается на вход элемента И 48, в результате закрывается прохождение сигналов от остальных датчиков. При отскоке мяча от стойки 21 в поле сигнал лог. "1" с выхода элемента ИЛИ 45 через устройство задержки поступает на R вход RS-триггера 50, т. е. устанавливает его в начальное состояние [3]. 4. ОПИСАНИЕ ПРИНЦИПА ДЕЙСТВИЯ ПИП В СТАТИЧЕСКОМ И ДИНАМИЧЕСКОМ РЕЖИМАХ 4.1 ВНЕШНИЙ ФОТОЭФФЕКТ Внешний фотоэффект – испускание электронов веществом под действием электромагнитных излучений. Электроны, которые вылетают из вещества при внешнем фотоэффекте (рисунок 4.1), называются фотоэлектронами, а электрический ток, образуемый ими при упорядоченном движении во внешнем электрическом поле, называется фототоком. |