Курсовая работа по дисциплине Теория устройства судна по теме Расчет и анализ показателей пропульсивного комплекса судна
 Скачать 2.62 Mb. Скачать 2.62 Mb.
|

|
Расчёт максимальных значений мощности, подводимой к винту от двигателя Таблица 4
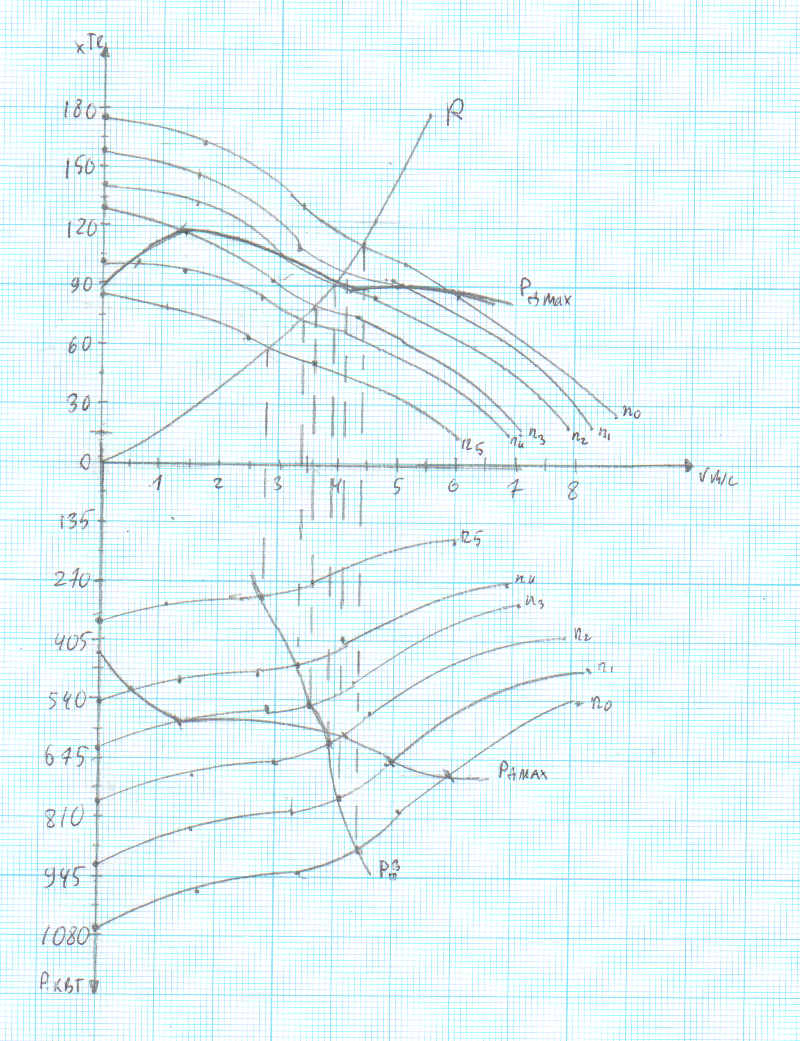
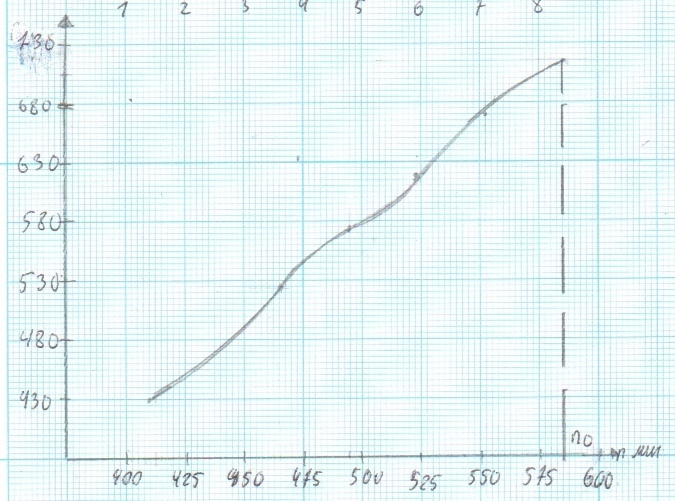 Рисунок 3 Определение динамических характеристик открытого винта Динамические характеристики движителя при его работе за корпусом судна в начале определяют в относительном виде, т.е. в виде зависимостей коэффициента эффективного упора (Ке) и коэффициента момента движителя (К2) от относительной поступи (р – для ОВ). Расчет динамических характеристик открытого винта выполняется в форме таблицы 5. Расчет динамических характеристик открытого винта Таблица 5
В таблице 5 показатель  – скольжение винта, взятое по шагу нулевого упора; его расчёт выполняется по формуле: – скольжение винта, взятое по шагу нулевого упора; его расчёт выполняется по формуле:  Где λ – переменное значение поступи, а  1 1Для выявления изменения t (коэффициента засасывания) по таблице 5 используется эмпирическое условие:  В соответствии с этим условием можно записать: В соответствии с этим условием можно записать:  . Работа винта при швартовах. . Работа винта при швартовах. далее cо значением t рассчитаем коэффициент эффективного упора винта далее cо значением t рассчитаем коэффициент эффективного упора винта  Расчет динамических характеристик движителя при постоянных частотах его вращения Расчёт Ре , (х∙Те) ,vе , v - в таблице 6 выполняется однотипно при различных частотах вращения винта. По данным таблицы 4; 5; 6 на рисунке 3 построены ходовые характеристики судна. Расчет динамических характеристик движителя при постоянных частотах его вращения Таблица 6
 Разработка теоретического чертежа гребного винта Теоретический чертеж гребного винта дает представление о его форме и размерах. Он изображается в двух проекциях. Проекция на плоскость, перпендикулярную к оси вращения, называется нормальной проекцией гребного винта; проекция на вертикальную плоскость параллельную оси винта, – боковой проекцией.   Определяется средняя ширина лопасти  , мм. , мм.  С использованием bc рассчитывается максимальная ширина лопасти, мм:  Представление о форме ступицы дает рисунок. Диаметр ступицы в плоскости действия винта (do) определяется с использованием относительного диаметра:   Внутренняя поверхность ступицы сопрягается с поверхностью конусной части гребного вала. Сила упора винта на переднем ходу передается на вал через его коническую часть. Конусность вала и ступицы при шпоночном соединении между ними принимается равной:  =5 мм =5 ммВсе размеры винта посчитаны в таблице: 7.1; 7.2; 7.3. Таблица 7.1 Исходные данные
Таблица 7.2 Спрямленный контур лопасти
Таблица 7.3 Расчет координат точек проекции лопасти
Заключение В процессе проектирования пропульсивного комплекса выполнили следующие задача: при заданных номинальных условиях загрузки и движения судна определили такие значения параметров геометрии и работы гребного винта при которых его к.п.д. будет максимальным. Разработали теоретический чертеж гребного винта. Таким образом геометрия винта считается неизменной при всех возможных режимах эксплуатации судна. Список литературы:Кеслер А.А. Расчёт и анализ показателей пропульсивного комплекса судна: методические указания к выполнению курсовой работы /А.А.Кеслер – Н.Новгород: Изд-во ФГОУ ВПО «ВГАВТ», 2007. – с. Кеслер А.А. Альбом вспомогательных диаграмм для расчёта гребных винтов / А.А.Кеслер – Н.Новгород, 2012.- с. Васильев А.В. Гидродинамика судов внутреннего плавания, в 4 ч, ч.1 Расчет сопротивления движению судов внутреннего плавания: Учеб. пособие. 2-е изд. перераб. и доп. / А.В. Васильев, В.Н. Савинов, П.Н. Егоров. – Н. Новгород, НГТУ, 1996. – 147 с. Руководство по расчету и проектированию гребных винтов судов внутреннего плавания / Под. ред. А.М. Басина, Е.И. Степанюка – Л.: Транспорт, 1977. – 272 с. Руководство по расчету и проектированию гребных винтов судов внутреннего плавания / Под ред. А.М. Басина, Е.И. Степанюка – Л.: Транспорт, 1977. Приложение – 40 с. Шмаков В.М. Теория, устройство судов и движители: Методические указания / В.М. Шмаков; ВГАВТ. – Н. Новгород, 1995. – 62 с. Кеслер А.А. Оформление общепроектной и технологической документации в курсовых и дипломных проектах: Методические указания / А.А. Кеслер, Е.Г. Бурмистров. – Н. Новгород: ФГОУ ВПО «ВГАВТ», 2005. – 64 с. | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||


 p,
p,