Курсовая работа по прикладной механике Выполнил студент Коныров Ж. Б. Проверил Колосов В. И. Тюмень 2017 г
 Скачать 406 Kb. Скачать 406 Kb.
|

|
Министерство образования и науки Российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Тюменский Индустриальный Университет» Курсовая работа по прикладной механике Выполнил студент: Коныров Ж. Б. Проверил: Колосов В. И. Тюмень 2017 г. Содержание1. Задание на контрольную работу 2. Структурный анализ рычажного механизма 3. Кинематический синтез 4. Кинематический анализ 5. Определение приведенных моментов сил производственных сопротивлений 6. Определение мощности сил движущих и подбор электродвигателя 7. Приведение моментов инерции звеньев агрегата к валу кривошипа 8. Определение момента инерции маховика 9. Расчет редуктора 1. Задание на контрольную работу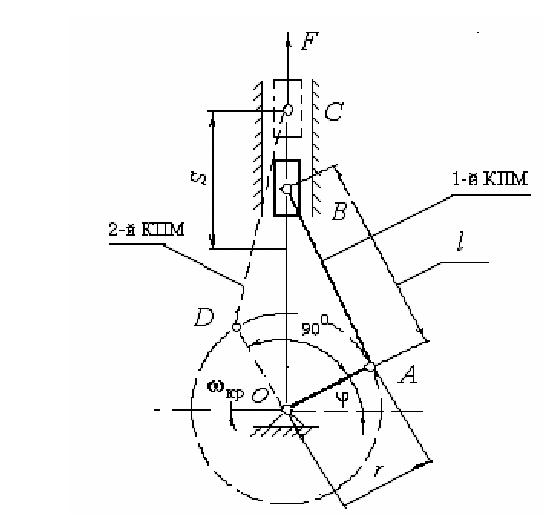
2. Структурный анализ рычажного механизмаИсследуемый механизм, кинематическая схема, которого приведена на рис. 2 служит для преобразования вращательного движения кривошипа 1 (входное звено) в поступательное движение ползунов 3 и 5 (выходное звено). 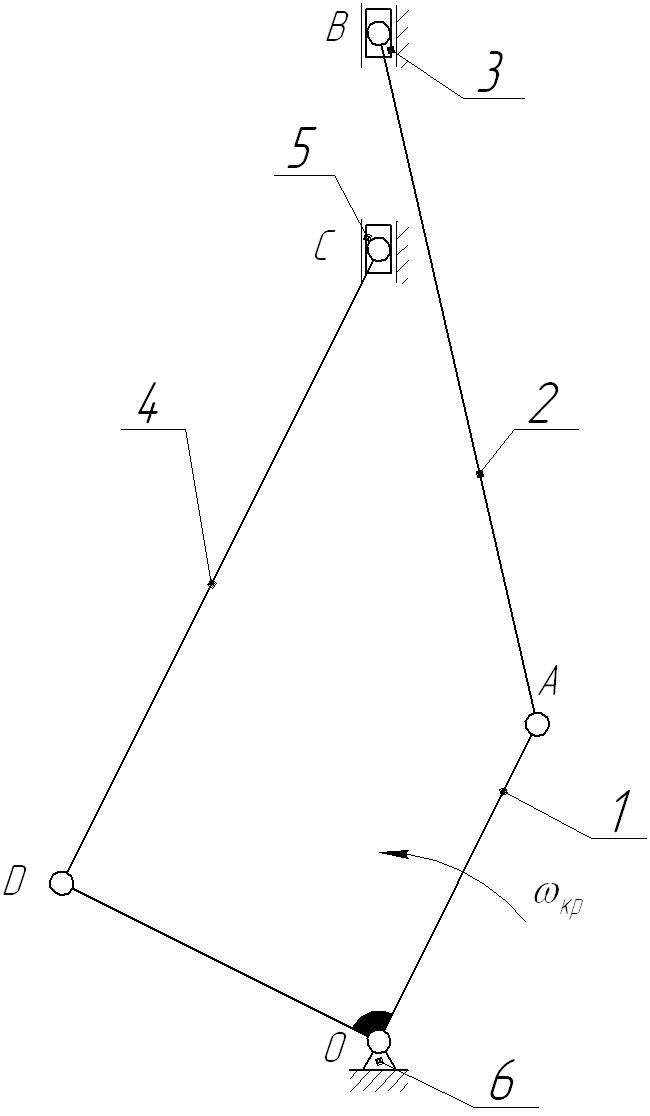 Рисунок 2 –Кинематическая схема механизма Определяем степень подвижности механизма по формуле: де, р5 – число кинематических пар V класса; р4 – число кинематических пар IV класса; n – число подвижных звеньев. Итак, Так как W=1 то у механизма одно входное звено. Механизм состоит из 5 звеньев: 1-кривошип; 2-шатун; 3-ползун; 4-шатун; 5-ползун; 6- стояк. О(6-1) - кинематическая пара пятого класса, вращающееся низшая; А(1-2)- кинематическая пара пятого класса, вращающееся низшая; В(2-3) - кинематическая пара пятого класса, вращающееся низшая; В6(3-6) - кинематическая пара пятого класса, поступательная низшая. D(1-4) - кинематическая пара пятого класса, вращающееся низшая; С(5-4) - кинематическая пара пятого класса, вращающееся низшая; С6(5-6) - кинематическая пара пятого класса, поступательная низшая. Раскладываем механизм на группы Асура 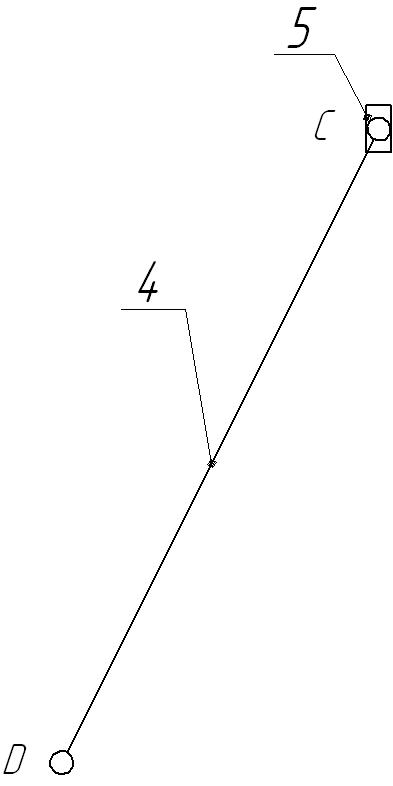 Рисунок 3 – Структурная группа 4-5 Данная группа состоит: – из двух подвижных звеньев (шатун 4 и ползун 5), т.е. – трёх кинематических пар (вращательная 4 -5, вращательная 1 –4, поступательная 5 – 6), т.е. Подставив найденные значения коэффициентов в формулу Чебышева, получаем: Равенство нулю подвижности группы доказывает, что рассматриваемая группа звеньев 4 – 5 является структурной группой. Данная группа является: – группой второго класса, так как состоит из двух подвижных звеньев; – группой второго порядка, так как имеется два свободных поводка; – группой второго вида, так как состоит из двух вращательных кинематических пар и одной поступательно(ВВП). Данная группа II класса и 2-го вида 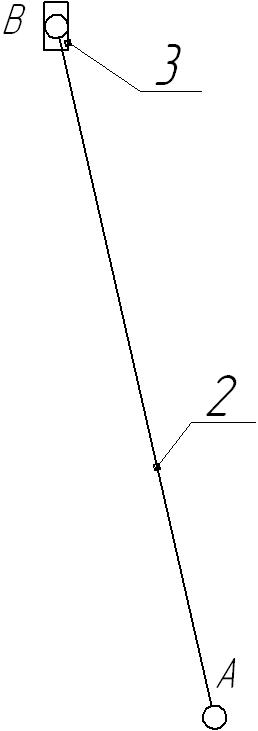 Рисунок 4 – Структурная группа 2-3 Данная группа состоит: – из двух подвижных звеньев (шатун 2 и ползун 3), т.е. – трёх кинематических пар (вращательная 2 -3, вращательная 1 –2, поступательная 3 – 6), т.е. Подставив найденные значения коэффициентов в формулу Чебышева, получаем: Равенство нулю подвижности группы доказывает, что рассматриваемая группа звеньев 2 – 3 является структурной группой. Данная группа является: – группой второго класса, так как состоит из двух подвижных звеньев; – группой второго порядка, так как имеется два свободных поводка; – группой второго вида, так как состоит из двух вращательных кинематических пар и одной поступательно(ВВП). Данная группа II класса и 2-го вида 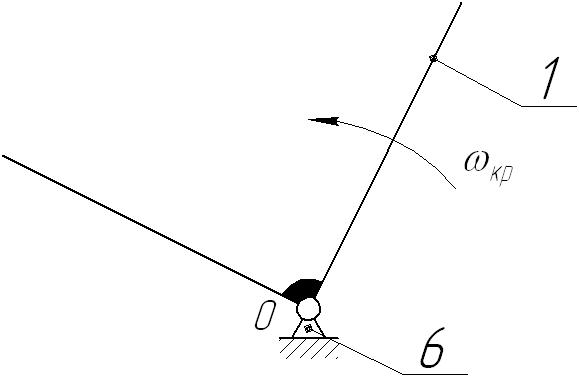 Рисунок 5 – Начальный механизм Данная группа состоит: – из одного подвижного звена (кривошип 1) и шарнирно-неподвижной опоры (стойка О), т.е. – одной кинематической пары (вращательная 0 – 1), т.е. Подставив найденные значения коэффициентов в формулу Чебышева, получаем: Подвижность исследуемой группы получилась больше нуля, следовательно она не является структурной группой, а представляет собой первичный (элементарный) механизм, с подвижностью равной единице. Из проведенного анализа следует, что структурная схема механизма состоит из структурной группы звеньев и одного первичного механизма. Так как класс механизмов определяется классом наиболее сложной структурной группы, то рассматриваемый рычажный механизм является механизмом 2-го класса, с подвижностью равной единице. | ||||||||||||||||||||||||||