Голованова А.А. курсовая работа. Курсовой проект дисциплина Устройство приёма и преобразования сигналов Тема проекта Проектирование радиоприемного устройства сигналов с фазовой манипуляцией (глонасс)
 Скачать 0.75 Mb. Скачать 0.75 Mb.
|

  Министерство науки и высшего образования РФ Федеральное государственное автономное общеобразовательное учреждение высшего образования «СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСТИТЕТ» Институт инженерной физики и радиоэлектроники Кафедра «Радиоэлектронные системы» КУРСОВОЙ ПРОЕКТ Дисциплина: Устройство приёма и преобразования сигналов Тема проекта: Проектирование радиоприемного устройства сигналов с фазовой манипуляцией (ГЛОНАСС) Преподаватель ________ А.К. Дашкова подпись, дата инициалы, фамилия Студент ВЦ18-01РТВ, 301831279 ________ А.А. Голованова номер группы, номер зачётной книжки подпись, дата инициалы, фамилия Красноярск 2022 Введение 21 век – это век информационных технологий, в настоящее время практически ни один человек не может представить свою жизнь без гаджетов, таких как мобильный телефон, персональный компьютер, и без использования глобальной сети интернет. В этот ряд вполне по праву можно включить спутниковые радионавигационные системы: GPS и ГЛОНАСС. Глобальность систем ГНСС обеспечивается функционированием на орбитах набора видимых из любой точки Земли спутников, непрерывно передающих высокоточные измерительные сигналы. Тем самым вокруг нашей планеты создано как бы информационное координатно-временное поле, находясь в котором пользователь с помощью специального приемника может черпать из него данные о своем положении в пространстве и времени. ГЛОНАСС – глобальная навигационная система. Система ГЛОНАСС предназначена для глобальной оперативной навигации приземных подвижных объектов. По своей структуре ГЛОНАСС считается системой двойного действия, то есть может использоваться как в военных, так и в гражданских целях. ГЛОНАСС позволяет в абсолютно любой точке Земного шара, а также в космическом пространстве вблизи планеты определять местоположение и скорость объектов. Краткие сведения о системе ГЛОНАСС Глобальная навигационная спутниковая система – российская спутниковая система навигации. Глобальная навигационная спутниковая система ГЛОНАСС предназначена для определения местоположения, скорости движения, точного времени морских, воздушных, сухопутных и других видов потребителей, а также для выполнения дополнительных информационных функций. Система транслирует гражданские сигналы, доступные в любой точке земного шара, предоставляя навигационные услуги на безвозмездной основе и без ограничений. Подсистема контроля и управления состоит из Центра управления системой ГЛОНАСС и сети станций измерения, управления и контроля, рассредоточенных по всей территории России. Задачи ПКУ: контроль правильности функционирования ПКА, непрерывное уточнение параметров орбит и выдача на НКА временных программ, команд управления и навигационной информации. Принцип работы системы ГЛОНАСС Принцип работы системы ГЛОНАСС заключается во взаимодействии 22 спутников, которые определяют координаты и скорость наземных, морских, воздушных и космических объектов. Всего в составе орбитальной группировки 24 спутника (2 из них в резерве), которые покрывают 100% площадь России и 70% площадь земного шара. На объект, координаты которого необходимо определить, устанавливается приемно-передающее устройство – терминал. Для позиционирования терминал подает запрос на спутники. 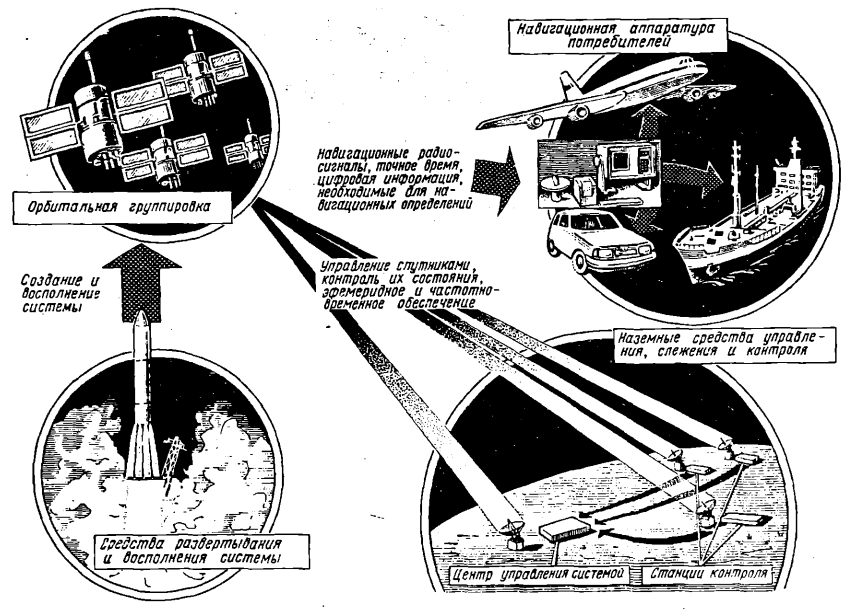 Рисунок 1 – Схема радионавигационной системы ГЛОНАСС Применение ГЛОНАСС 1– Местоопределение: а) Передача данных о местоположении: Пространственно-ориентированный доступ к информационным ресурсам; Геопространственные информационные системы; Комплексная информация об окружающем пространстве. б) Мониторинг: в) Геодезия и картография: Геодезическая съёмка; Кадастровые работы, межевание; Поддержка проведения инженерных работ и строительства; Актуализация карт и планов. 2– Навигация: а) Досуг и отдых: Туризм; Рыбная ловля, охота; Лодочный спорт; Прокладка маршрутов путешествий; Персональные аварийные маяки. б) Наземный транспорт: Автономное построение маршрутов движения; Интеллектуальные транспортные системы. 3– Научные исследования и синхронизация Характеристики ГЛОНАСС и сравнение с GPS ГЛОНАСС по принципу измерения практически аналогичен второму глобальному комплексу – GPS. Однако разница между ними есть. В первую очередь это положение группировок. Спутники у GPS расположены по шести плоскостям, орбиты вращения у них круговые. Благодаря этому в каждой точке земного шара обеспечен прием минимум с 6 из 24 аппаратов, из-за чего говорят о большей точности GPS. Конкретный показатель зависит от многих факторов, поэтому для повышения качества измерений разумно использовать обе системы. В таблице 1 приведены краткие характеристики систем ГЛОНАСС и GPS. Таблица 1 – Сравнительные характеристики систем ГЛОНАСС и GPS
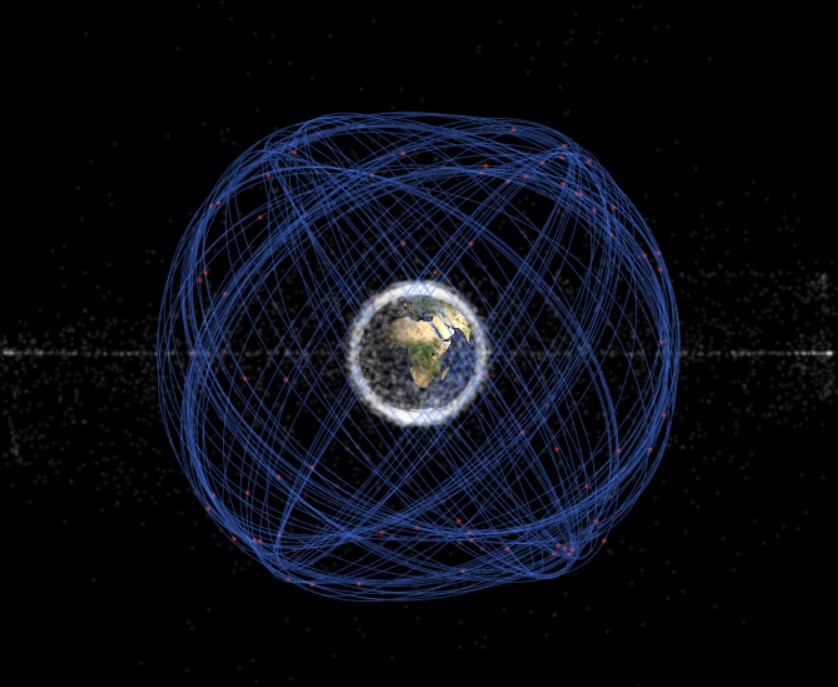 Рисунок 2 – Орбиты спутников GPS  Рисунок 3 – Орбиты спутников ГЛОНАСС На рисунках наглядно показаны орбиты вращения спутников систем ГЛОНАСС и GPS. Принципы построения радиоприемных устройств сигналов с заданным видом модуляции 2.1. Особенности фазоманипулированных сигналов 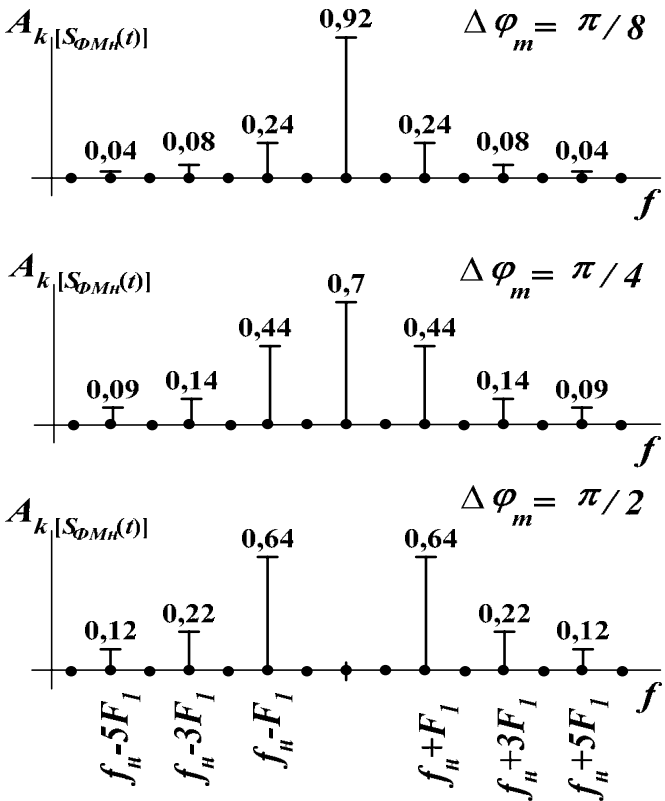 Рисунок 4 – Спектры сигналов фазовой манипуляции при различных значениях девиации фазы 2.2. Принципы построения устройства приёма и преобразования сигналов с фазовой манипуляцией спутниковой радионавигационной системы ГЛОНАСС Современная навигационная аппаратура потребителя (НАП) является аналогово-цифровой системой. Обобщенная структурная схема навигационной аппаратуры потребителя представлена на рисунке !ниже! и включает антенну, радиочастотный блок (РЧБ), синтезатор частот (СЧ), аналогово-цифровой преобразователь (АЦП) и цифровой вычислитель (ЦВ). 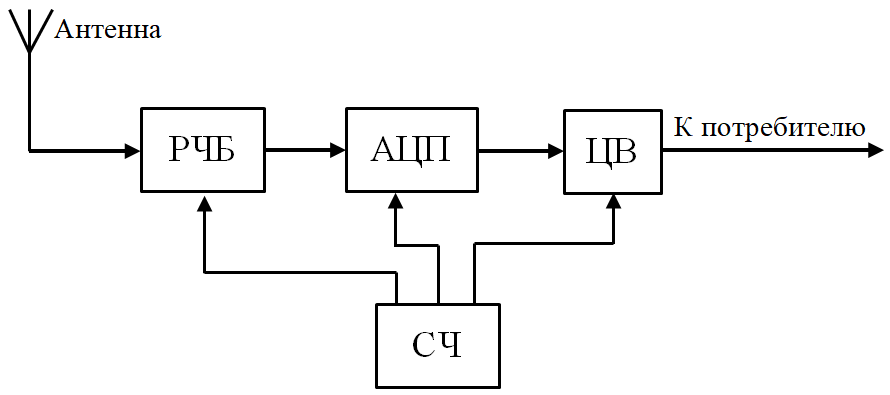 Рисунок 5 – Обобщенная структурная схема НАП Обобщенная структурная схема современного радиоприемника представлена на рисунке 6. 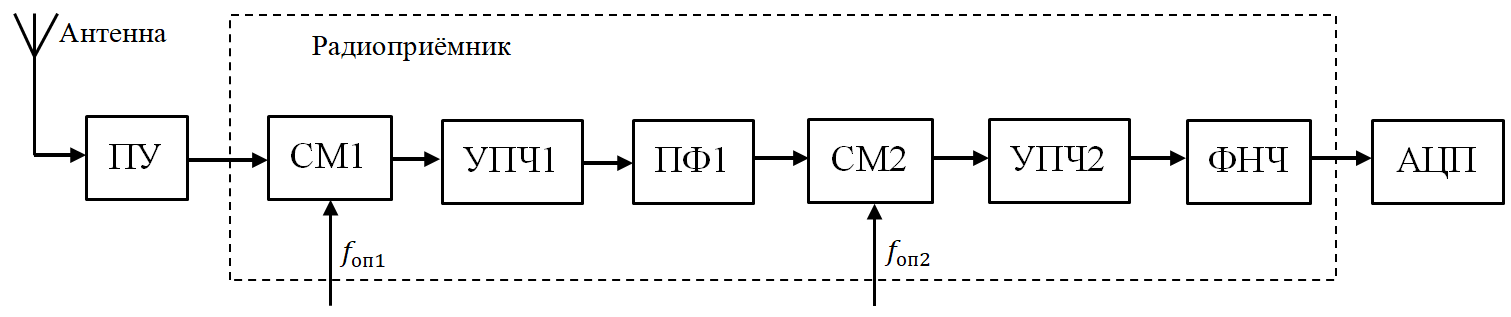 Рисунок 6 – Обобщенная структурная схема радиоприемника навигационной аппаратуры потребителя Рисунок 6 – Обобщенная структурная схема радиоприемника навигационной аппаратуры потребителяПУ – полосовой усилитель, встроенный в один модуль с антенной; СМ1 и СМ2 – смесители; ПФ1 – полосовой фильтр; УПЧ1 и УПЧ2 – усилители промежуточных частот; ФНЧ – фильтр нижних частот; АЦП – аналогово-цифровой преобразователь; Fоп1 и fоп2 – первая и вторая опорные частоты. 3) Техническое задание В данном курсовом проекте требуется разработать приемное устройство Глонасс с параметрами, соответствующими техническому заданию. Основные требования: Вид модуляции: ФМн (приемник ГЛОНАСС) Диапазон частот: 1602 МГц Расстройка, соответствующая соседнему каналу: ±50 кГц Вид модуляции – фазовая манипуляция с дифференциальным кодированием. Антенна – микрополосковая со встроенным малошумящим усилителем с коэффициентом усиления 25 дБ. Разработка приемника спутниковой радионавигационной системы GPS. Приемник GPS должен быть разработан в соответствии с техническими требованиями. Индивидуальные требования для устройств ПиОС навигационных спутниковых систем ГЛОНАСС и GPS: – Относительная нестабильность несущей частоты принимаемого сигнала: не более 3·10-5; – Шумовая температура антенны: 140 К; – Реальная чувствительность: не более 150 минус дБ/Вт; – Ослабление зеркального и соседнего каналов: не менее 45 дБ; – Динамический диапазон входных сигналов: не более 60 дБ. Характеристики навигационного радиосигнала Каждый спутник системы ГЛОНАСС передает непрерывные навигационные сигналы на собственной несущей частоте в поддиапазонах L1 и L2 (1600 и 1250 МГц). Навигационный радиосигнал является многокомпонентным фазоманипулированным сигналом. Фазовая манипуляция несущей осуществляется на 180° с максимальной погрешностью не более 15°. Несущие модулируются двумя бинарными кодами: кодом стандартной точности (СТ-код) и кодом высокой точности (ВТ-код), а также данными навигационного сообщения. На частоте L1 передаются оба типа бинарных кодов, а на частоте L2 - только ВТ-код. СТ-код генерируется с частотой 0,511 МГц, он доступен гражданским пользователям для навигации стандартной точности. ВТ-код генерируется с частотой 5,11 МГц и служит для навигации высокой точности. ВТ-код может изменяться космическими войсками РФ без предварительного уведомления. Номинальные значения несущих частот навигационных радиосигналов «Глонасс» в частотных поддиапазонах L1 и L2 определяются следующими выражениями: fK1 = f01 + КΔf1 fK2 = f02 + КΔf2 где К – номера несущих частот навигационных радиосигналов, излучаемых в частотных поддиапазонах L1 и L2; f01 = 1602 МГц; Δf1 = 562,5 кГц, для поддиапазона L1; f02 = 1246 МГц; Δf2 = 437,5 кГц, для поддиапазона L2. Распределение номинальных значений несущих частот fK1 и fK2 по номерам К приведено на рисунке 7. 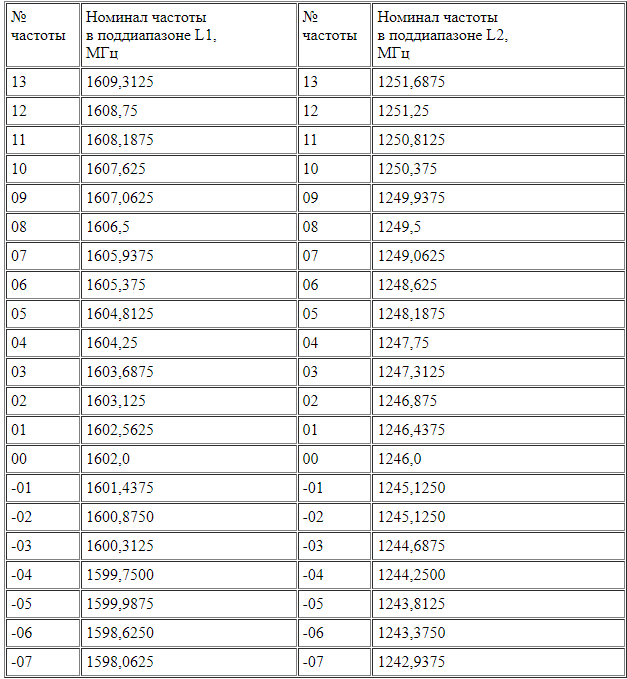 Рисунок 7 – Распределение несущих частот поддиапазонов L1 и L2 3.1. Корреляционные потери Корреляционные потери обусловлены не идеальностью модулятора и ограничением спектра радиосигнала в передатчике навигационного сигнала. Для навигационного сигнала стандартной точности корреляционные потери пренебрежимо малы. 3.2. Фазовые шумы несущей Спектральная плотность фазовых шумов немодулированной несущей такова, что схема слежения, имеющая одностороннюю шумовую полосу 10 Гц, обеспечивает точность слежения за фазой несущей частоты не хуже 0,1 радиан (среднеквадратическое значение). 3.3. Нежелательные излучения 3.4. Внутрисистемные радиопомехи Внутрисистемные радиопомехи определяются взаимокорреляционными свойствами используемого в составе навигационного радиосигнала дальномерного псевдослучайного кода с учетом частотного разделения сигналов. При приеме навигационного радиосигнала с литером частоты К = n, помехи, создаваемые радиосигналом с номером частоты K = n-1 или K = n+1, ослаблены не менее, чем на 48 дБ относительно мощности радиосигнала с литером частоты К = n при условии нахождения НКА, излучающих эти сигналы, в зоне видимости. 3.5. Мощность радиосигналов, принимаемых потребителем Мощность радиосигнала, принимаемого потребителем от навигационного космического аппарата (НКА) ГЛОНАСС, на выходе приемной линейно поляризованной антенны с коэффициентом усиления +3 дБ и при угле места НКА более 5° составляет не менее минус 161 дБВт для частот поддиапазона L1. 3.6. Групповая задержка навигационного радиосигнала в бортовой аппаратуре НКА Групповая задержка навигационного радиосигнала в бортовой аппаратуре данного НКА определяется как задержка между излучаемым радиосигналом (измеряется в фазовом центре передающей антенны НКА) и выходным сигналом бортового стандарта частоты. Групповая задержка навигационного радиосигнала в бортовой аппаратуре включает детерминированную и недетерминированную составляющие. 3.7. Когерентность передаваемых НКА сигналов Все составляющие передаваемого данным НКА навигационного радиосигнала когерентно сформированы из частоты единого бортового стандарта. 3.8. Поляризация излучаемого навигационного радиосигнала Излучаемый каждым НКА системы ГЛОНАСС навигационный радиосигнал в поддиапазонах L1 и L2 имеет правую круговую поляризацию. Коэффициент эллиптичности по полю в секторе углов излучения ±19° относительно оси симметрии диаграммы направленности бортовой передающей антенны НКА не хуже 0,7. 3.9. Характеристики модулирующей последовательности Модулирующая последовательность, используемая при формировании сигналов стандартной точности для модуляции несущих частот поддиапазонов L1 и L2 для НКА ГЛОНАСС, образуется сложением по модулю два трех двоичных сигналов: - псевдослучайного дальномерного кода, передаваемого со скоростью 511 кбит/с; - навигационного сообщения, передаваемого со скоростью 50 бит/с; - вспомогательного меандрового колебания, передаваемого со скоростью 100 бит/с. Данные последовательности используется для модуляции несущих частот поддиапазонов L1 и L2 при формировании сигналов стандартной точности. 3.10. Формирование псевдослучайного дальномерного кода ПС дальномерный код представляет собой ПС последовательность максимальной длины регистра сдвига с периодом повторения 1 мс и скоростью передачи символов 511 кбит/с. 3.11. Формирование навигационного сообщения Информация навигационного сообщения, формируется в виде непрерывно следующих строк длительностью 2 с. В первой части каждой строки в течение 1,7 с передается информация навигационного сообщения. Во второй части каждой строки в течение 0,3 с. передаётся двоичный код метки времени. Двоичный код метки времени представляет собой укороченную двоичную псевдослучайную последовательность длиной 30 символов с длительностью символов 10 мс и имеет вид: 111110001101110101000010010110. 3.12. Структура регистра сдвига, формирующего дальномерный код Временные соотношения между синхроимпульсами модулирующей двоичной последовательности информации навигационного сообщения и дальномерным кодом ПСПД (псевдослучайная последовательность дальномерная) приведены на рисунке 8. Процесс формирования двоичной последовательности информации навигационного сообщения поясняет рис. 3.6. Содержание и формат навигационного сообщения приведены в разделе 4 настоящего документа. 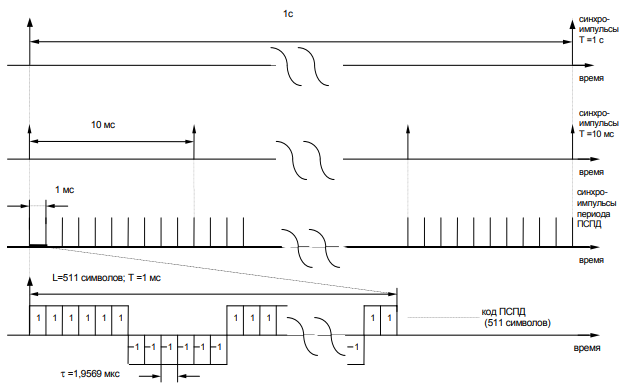 Рисунок 8 – Временные соотношения между синхроимпульсами модулирующего навигационного сигнала и дальномерным кодом ПСПД 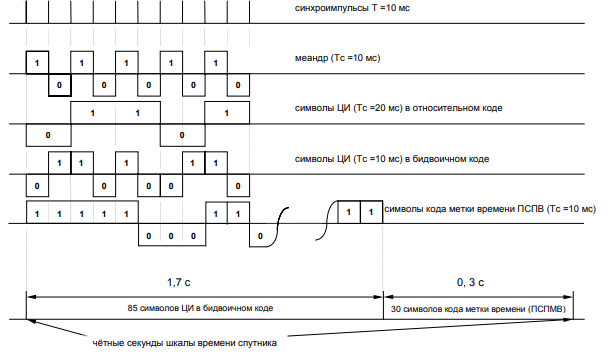 Рисунок 9 – Формирование последовательности данных в процессоре НКА 4) Разработка структурной и функциональной схем приемника и выбор элементной базы 3.1. Выбор структурной схемы приемника ГЛОНАСС приемник должен принимать сигнал на основной частоте L1 равной 1602 МГц, тип используемой модуляции - фазовая манипуляция (BPSK). Приемник должен определить решить следующие навигационные задачи: поиск литерных частот спутников, определение временной задержки, определение доплеровского сдвига частоты, определение координат в пространстве. 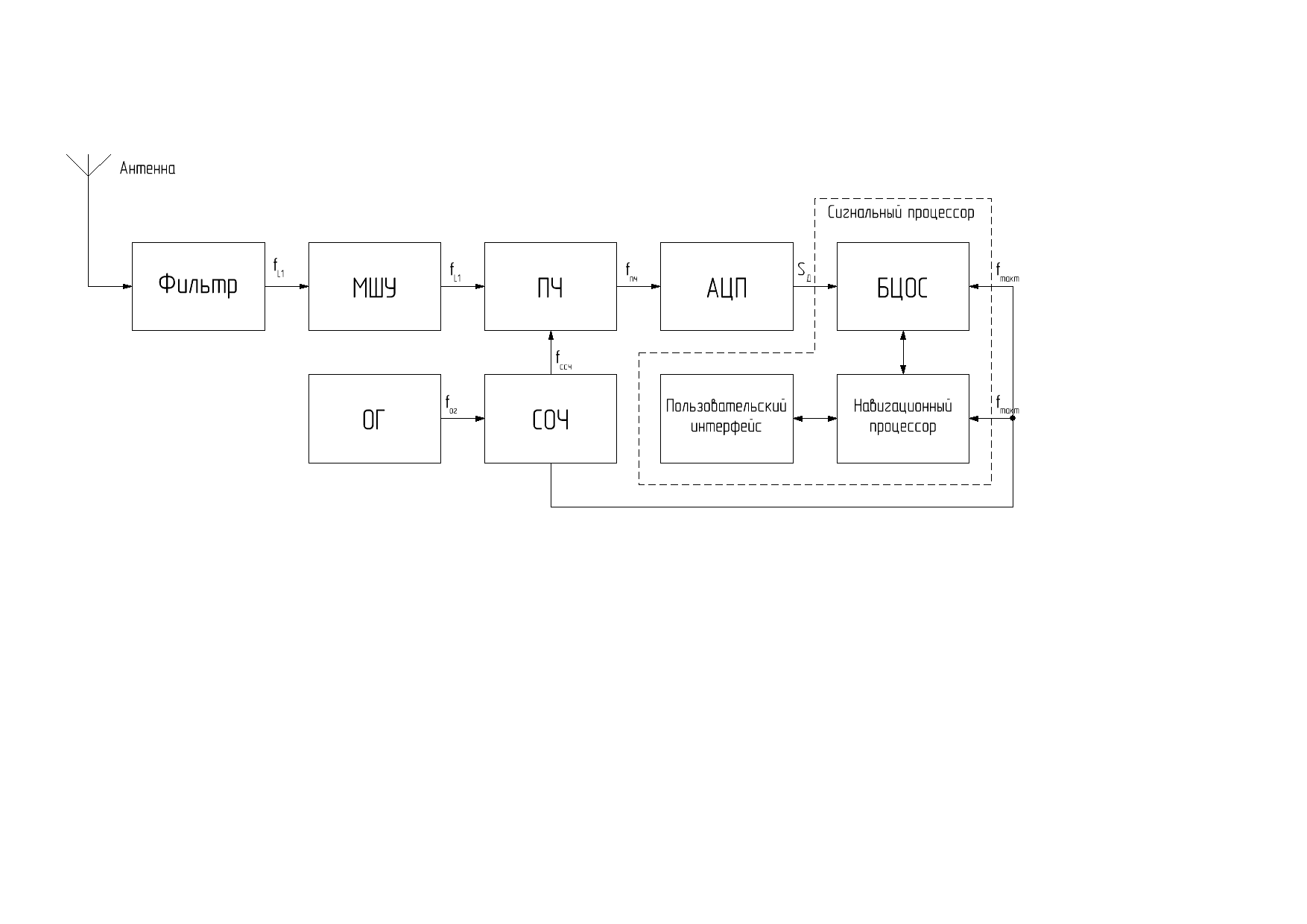 Рисунок – Структурная схема ГЛОНАСС приемника 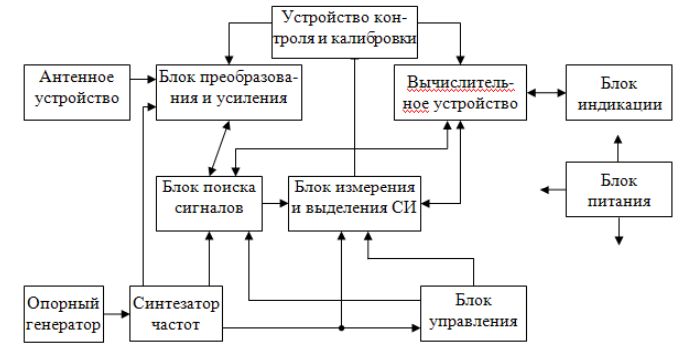 Рисунок – Функциональная схема приемника Список использованной литературы Сетевые спутниковые радионавигационные системы / В.С. Шебшаевич, П.П. Дмитриев и др. – М.: Радио и связь, 1993. Глобальная спутниковая радионавигационная система ГЛОНАСС / Под ред. В.Н. Харисова, А.И. Перова, В.А. Болдина. – М.: ИПРЖР, 1998. Глобальная спутниковая навигационная система ГЛОНАСС. Интерфейсный контрольный документ: 4-я ред. М.: Изд-во КНИЦ ВКС РФ, 1998. Методы определения навигационных параметров подвижных средств с использованием спутниковой радионавигационной системы ГЛОНАСС: монография / В. Н. Тяпкин, Е. Н. Гарин. – Красноярск: Сиб. федер. ун-т, 2012. – 260 с. Навигационно-информационные системы : учебно-методическое пособие по практическим занятиям и самостоятельной работе [Электронный ресурс] / сост. А.В. Гребенников. В.Н. Тяпкин. – Электрон. дан. – Красноярск : Сиб. федер. ун-т, 2017. – 87 с. Радионавигационные системы воздушных судов : учебник / О.Н. Скрыпник. – М.: ИНФРА-М, 2018 – 348 с. ГЛОНАСС. Интерфейсный контрольный документ (редакция 5.1). М.: Российский научно-исследовательский институт космического приборостроения – Москва, 2008. ГЛОНАСС. Интерфейсный контрольный документ (редакция 1). М.: АО «Российские космические системы» – Москва, 2016.
УЭ2.517.012 ПС
Копировал: Формат А4  | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||